ЩЯвЛеТНВЕНдѕУДЩъЧыКЭДЅЗЂвЛДЮжаЖЯВЂЧвКЭгІгУВуНјааЪ§ОнЕФНЛЛЅЁЃЕЋЪЧЮвУЧПДЕНетИіжаЖЯОЭИњМйЕФжаЖЯвЛбљЁЃ
ЩъЧыжаЖЯ,ВЂЩшжУЮЊЫЋБпбиЕФДЅЗЂЗНЪНЁЃДЅЗЂСЫжЎКѓЮвУЧЕФжаЖЯДІРэГЬађОЭЛсжДаа,АбжЕЗХЕНЮвУЧЕФЪ§ОнЛКГхЧјЁЃ
ФЧЮвгІгУВуВЂВЛжЊЕРФуЪВУДАДАЁ,ЮвЕУвЛжБШЅЖСФуЕФЪ§ОнЛКГхЧјЕФжЕВХФм
ЖСЕНЕФДЋЙ§РДЕФЪ§ОнАЁЁЃетОЭКмВЛКУ,ВЛНіНіШУгІгУГЬађЪВУДЖМзіВЛСЫ,ЖјЧвЛЙвЛжБеМзХCPUЕФзЪдДЁЃ
ФЧУДЮЊСЫДІРэетжжЪТМўЮвУЧдкЧ§ЖЏжав§ШыСЫЮФМўIOФЃаЭЁЃ
ЮФМўIOФЃаЭгаЫФжж:
1)зшШћ
2)ЗЧзшШћ
3)ЖрТЗИДгУ
4)вьВНаХКХ
вЛЁЂзшШћФЃаЭ
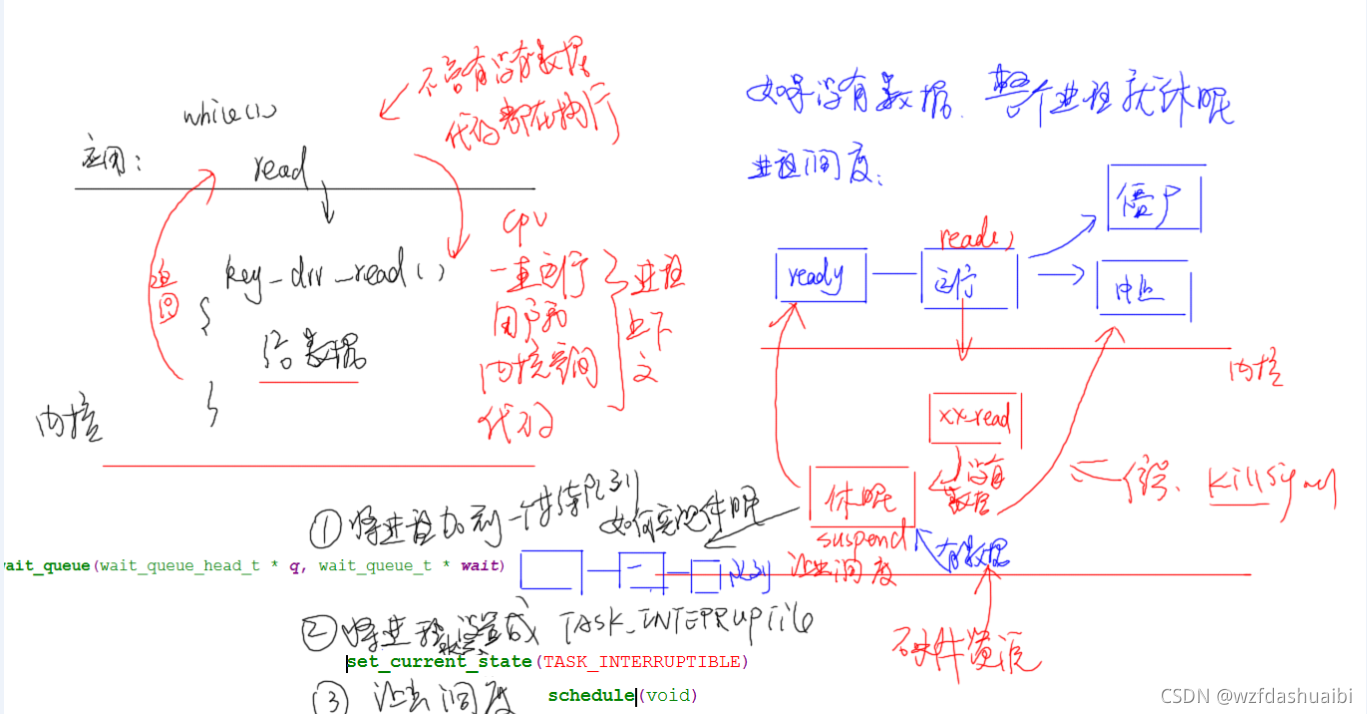
зшШћФЃаЭЕФИХФю:ОЭЪЧМйЩшгІгУГЬађдкЭЈЙ§ЮФМўВйзїНсЙЙЬхЕФЖСЪ§ОнЕФЪБКђЮвЪ§ОнЛКГхЧјУЛгаЪ§Он,ЮвОЭВЛвЛжБЖССЫ,ЮвОЭНјааанУпЁЃНјШыжажЙЬЌЁЃВЂНЋ(READетИіНјГЬ)ЗХШыЕНвЛИіЕШД§ЖгСаРяУцзшШћ,ЕШД§ЛНабаХКХЁЃ
ЕБЮвУЧДЅЗЂвЛДЮжаЖЯжЎКѓ,ЮвУЧдкжаЖЯДІРэГЬађРяУцМгШыЛНабГЬађЁЃетбљЮвУЧОЭПЩвдЪЕЯжзшШћФЃаЭ,ВЂДѓСПМѕаЁCPUЕФЫ№КФЁЃ
1)ЪЕЯжВНжшЁЃ
1,ЕШД§ЖгСаЭЗ
wait_queue_head_t
ВЂГѕЪМЛЏЕШД§ЖгСаЭЗ:init_waitqueue_head(wait_queue_head_t *q);
2,дкашвЊЕШД§(УЛгаЪ§Он)ЕФЪБКђ,НјааанУп
wait_event_interruptible(wait_queue_head_t wq, condition) // ФкВПЛсЙЙНЈвЛИіЕШД§ЖгСаЯю/НкЕуwait_queue_t
(ФкВПЛсЪЕЯжШ§ИіВНжш1,НЋЕБЧАНјГЬМгШыЕНЕШД§ЖгСаЭЗжа
НЋЕБЧАНјГЬзДЬЌЩшжУГЩTASK_INTERRUPTIBLE set_current_state(TASK_INTERRUPTIBLE)
ШУГіЕїЖШЈCанУпschedule(void))
ВЮЪ§1: ЕШД§ЖгСаЭЗ
ВЮЪ§2: ЬѕМў,ШчЙћЪЧЮЊМй,ОЭЛсЕШД§,ШчЙћЮЊец,ОЭВЛЛсЕШД§
ПЩвдгУвЛБъжОЮЛ,РДБэЪОЪЧЗёгаЪ§Он
3,дквЛИіКЯЪЪЕФЪБКђ(гаЪ§Он),ЛсНЋНјГЬЛНаб
wake_up_interruptible(wait_queue_head_t *q
гУЗЈ:
wake_up_interruptible(&key_dev->wq_head);
//ЭЌЪБЩшжУБъжОЮЛ
key_dev->key_state = 1;
ЖўЁЂЗЧзшШћФЃаЭ(NONBLOCK)
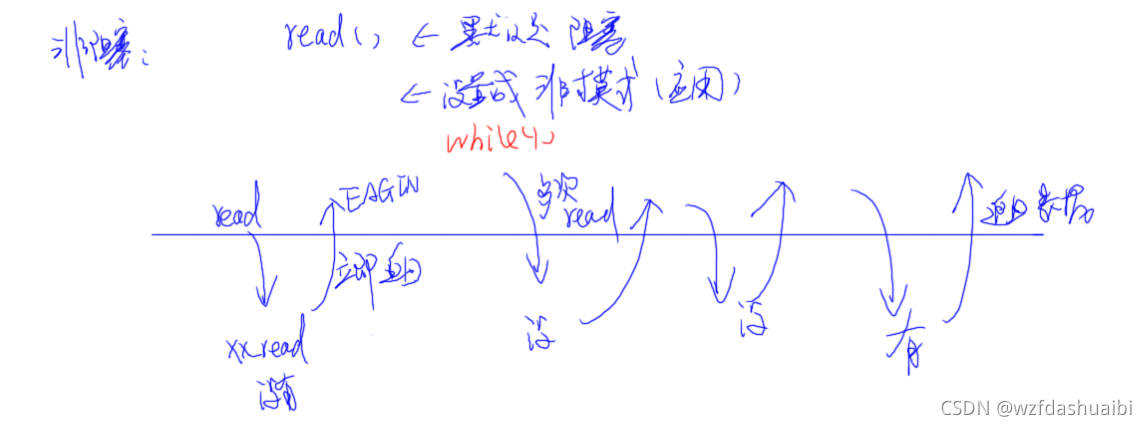
ЗЧзшШћФЃаЭЕФИХФю:ЗЧзшШћФЃаЭОЭЪЧЮвгІгУВувЊЖСЕФЪБКђЮвОЭЖС,ШчЙћУЛгаЪ§ОнЮвОЭзп,ВЂЧвЗЕЛивЛИіEAGEN,ШУгУЛЇХаЖСЪЧЗёгДАЁдйЖСвЛДЮЁЃ,ШчЙћгаЪ§ОнЮвОЭФУСЫЪ§ОнОЭзпЁЃ
ЪЕЯж:
1ЁЂдкгІгУВуГЬађopen зДЬЌЩшжУГЩЗЧзшШћФЃЪН,ШчЙћВЛЩшжУФЌШЯЪЧзшШћФЃЪН(openКЏЪ§,ЕФШЈЯоКѓУцЛЙПЩвдМгЩЯФЃЪНЕФбЁдё)ЁЃ
open("/dev/key0", O_RDWR|O_NONBLOCK);
2ЁЂдкЧ§ЖЏГЬађжаШЅХаЖЯ,ЕБЧАЕФФЃЪН ,ШчЙћЕБЧАЪЧЗЧзшШћФЃЪН,ВЂЧвУЛгаЪ§Он,СЂТэЗЕЛивЛИіГіДэТы
if(filp->f_flags & O_NONBLOCK && !key_dev->key_state)
return -EAGAIN;
filp->f_flags & O_NONBLOCK :етОфЕФвтЫМЪЧЮФМўСїжИеыжаЕФF_FLAGSЮЛжаШчЙћ==O_NONBLOCK ФЧУДетИіЕШЪНОЭВЛЮЊ0ЁЃ
!key_dev->key_state:ШчЙћKEYЕФзДЬЌЮЛЕШгк0(АДМќБЛАДЯТ)ФЧУДдйШЁЗДКѓОЭЪЧЕШЪНГЩСЂЁЃ
СНИігяОфЯр&&,БэЪОШчЙћflagЪЧЗЧзшШћФЃЪН,ВЂЧвзДЬЌЮЛУЛгаЪ§ОнЮвОЭжБНгЗЕЛи,вЛИі-EAGENИјгУЛЇЁЃ
ШчЙћВЛЪЧОЭМЬајжДааЯТУцЕФГЬађЁЃ

етСНЖЮДњТыСЌНггавЛаЉОЋЧЩжЎДІЁЃ
ЕквЛОф:ШчЙћЮЊЗЧзшШћЧвУЛгаЪ§ОнФЧУДОЭжБНгЗЕЛиЁЃ
ШчЙћЮЊЗЧзшШћЕЋЪЧгаЪ§Он,ФЧУДIFгяОфВЛГЩСЂ(ЪЧЗЧзшШћзДЬЌ)ЁЃдђМЬајжДааЯТУцЕФгяОфЁЃЕЋЪЧгаЪ§ОнЕФЪБКђзшШћКЭЮвЗЧзшШћзДЬЌЖМЪЧвЛбљЕФЁЃ
ШчЙћВЛЮЊЗЧзшШћзДЬЌФЧУДжБНгжДаазшШћзДЬЌЯТЕФГЬађЁЃ
вВОЭЪЧЫЕ,ВЛЙмФувЊДяЕНЪВУДзДЬЌЁЃетСНЬѕгяОфЖМПЩвдЫГРћжДааВЂДяЕНФЃФтЯывЊЕФзДЬЌЁЃ
Ш§ЁЂЖрТЗИДгУ select/poll/epoll
 ЖрТЗИДгУ: гУгкЕБФудкЕЅНјГЬЕЅЯпГЬжа(ОЭЪЧвЛИіГЬађЧвВЛДДНЈЯпГЬ)жаашвЊДІРэКмЖрРДздВЛЭЌаХКХдДЕФЕФаХЯЂЕФЪБКђ,ЖјЧвУЛгагХЯШМЖЁЃЖјЧвФуЛЙВЛжЊЕРаХКХЪВУДЪБКђРДЁЃетЪБКђОЭПЩвдВЩгУЖрТЗИДгУЁЃЯрЕБгкЮвгУСЫвЛИіФжСхЁЃЕБЮвФФвЛИіФжСхЯьСЫЮвОЭШЅИЩФФвЛМўЪТЁЃдкетРяОЭЪЧМрПиЮвУЧЕФвЛаЉЩшБИ,ЕБФЧИіЩшБИгааХКХЕФЪБКђЮвОЭШЅДІРэЩцБЪДЋЙ§РДЕФаХКХЁЃ
ЖрТЗИДгУ: гУгкЕБФудкЕЅНјГЬЕЅЯпГЬжа(ОЭЪЧвЛИіГЬађЧвВЛДДНЈЯпГЬ)жаашвЊДІРэКмЖрРДздВЛЭЌаХКХдДЕФЕФаХЯЂЕФЪБКђ,ЖјЧвУЛгагХЯШМЖЁЃЖјЧвФуЛЙВЛжЊЕРаХКХЪВУДЪБКђРДЁЃетЪБКђОЭПЩвдВЩгУЖрТЗИДгУЁЃЯрЕБгкЮвгУСЫвЛИіФжСхЁЃЕБЮвФФвЛИіФжСхЯьСЫЮвОЭШЅИЩФФвЛМўЪТЁЃдкетРяОЭЪЧМрПиЮвУЧЕФвЛаЉЩшБИ,ЕБФЧИіЩшБИгааХКХЕФЪБКђЮвОЭШЅДІРэЩцБЪДЋЙ§РДЕФаХКХЁЃ
ЮвУЧВЩгУPOLLетИіКЏЪ§:ЕЋЪЧЖрТЗИДгУгаШ§ИіКЏЪ§SELECT КЭ EPOLLвЊЧјЗжетШ§ИіКЏЪ§гаЪВУДЧјБ№ЁЃ
ВНжш:
1ЁЂдкгІгУГЬађжаДђПЊвЊНЛЛЅаХКХЕФвЛаЉЩшБИ,ВЂВњЩњЯргІЕФЮФМўУшЪіЗћ
2ЁЂгУPOLLРДМрПиетаЉЮФМў
int poll(struct pollfd *fds, nfds_t nfds, int timeout);
ВЮЪ§1: БэЪОЖрИіЮФМўУшЪіЗћМЏКЯ
struct pollfd { УшЪіЕФЪЧЮФМўУшЪіЗћЕФНсЙЙЬх
int fd; //ЮФМўУшЪіЗћ
short events; //ЯЃЭћМрПиfdЕФЪВУДЪТМў:ЖС(POLLIN),аД(POLLOUT),ГіДэ(POLLERR),
short revents; //НсЙћУшЪі,БэЪОЕБЧАЕФfdЪЧЗёгаЖС(POLLIN),аД(POLLOUT),ГіДэ(POLLERR),
//гУгкХаЖЯ,ЪЧФкКЫздЖЏИГжЕ
};
ВЮЪ§2:БЛМрПиЕНfdЕФИіЪ§
ВЮЪ§3: МрПиЕФЪБМф:
е§: БэЪОМрПиЖрЩйms
ИКЪ§: ЮоЯоЕФЪБМфШЅМрПи
0: ЕШД§0ms,РрЫЦгкЗЧзшШќ
ЗЕЛижЕ: ИКЪ§:ГіДэ
Дѓгк0,БэЪОfdжагаЪ§Он
ЕШгк0: ЪБМфЕНГЌЪБ
3ЁЂРћгУ short reventsРДХаЖЯЪЧЗёВњЩњСЫетаЉВйзї(аХКХЪЧЗёЗЂЩњ)ЁЃ
4ЁЂдкЧ§ЖЏГЬађжа,ЬэМгPOLLЕФЮФМўВйзїНсЙЙЬх
5ЁЂЪЕЯжpollЖдгІЕФКЏЪ§
// ЕїгУpoll_wait,НЋЕБЧАЕНЕШД§ЖгСазЂВсЯЕЭГжа
poll_wait(filp, &key_dev->wq_head, pts); // ЕїгУpoll_wait,НЋЕБЧАЕНЕШД§ЖгСазЂВсЯЕЭГжа
if(!key_dev->key_state)
mask = 0; // 1,ЕБУЛгаЪ§ОнЕНЪБКђЗЕЛивЛИі0
if(key_dev->key_state) // 2,гаЪ§ОнЗЕЛивЛИіPOLLIN
mask |= POLLIN
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊгІгУВуДњТы
#define KEY_ENTER 28
/* етИіНсЙЙЬхдкpoll.hЕФЭЗЮФМўжага,жБНггУ,ЮветРяФУГіРДЮЊСЫИќКУПД
truct pollfd {
int fd; //ЮФМўУшЪіЗћ
short events; //МьВтЪТМў PollinМьВтЪЧЗёЪфШы pollout pollerr
short revents; //ЗЕЛиМьВтЪТМў
};
*/
struct key_event{
int code; // БэЪОАДМќЕФРраЭ: home, esc, Q,W,E,R,T, ENTER
int value; // БэЪОАДЯТЛЙЪЧЬЇЦ№ 1 / 0
};
static char in_buf[64];
int main(int argc , char *argv[]){
int fd0;
int ret;
struct key_event event;
struct pollfd pfd[2];
//ДђПЊЩшБИЮФМў
fd0 = open("/dev/key0", O_RDWR);
if(fd0 < 0){
perror("open /dev/dey0");
exit(0);
}
// 0----БъзМЪфШы,1-----БъзМЪфГі,2------БъзМГіДэ
pfd[0].fd = fd0; //МьВтЩшБИЮФМў
pfd[0].events = POLLIN;
pfd[1].fd = 0; //МьВтБъзМЪфШыМќХЬ,ЖјЧвФкКЫвЛдЫааЕФЪБКђЮФМўОЭЪЧДђПЊЕФ
pfd[1].events = POLLIN;
poll(pfd, 2,-1);
while(1){
ret = poll(pfd, 2,-1);
if(ret > 0){
read(pfd[0].fd ,&event,sizeof(struct key_event));
if(pfd[0].revents & POLLIN ){ //АДМќБЛАДЯТ
if(event.code == "KEY_ENTER"){
if(event.value){
printf("key3 is purss");
}else{
printf("key3 is down");}
}
}
if(pfd[0].revents & POLLIN){ //МќХЬЪфШыаХЯЂ
fgets(in_buf, 64, stdin);
printf("in_buf = %s\n",in_buf);}
}else{
perror("poll");
exit(0);
}
}
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЧ§ЖЏВПЗжДњТы
unsigned int key_drv_poll (struct file *filp , struct poll_table_struct *pts){
// ЗЕЛивЛИіmaskжЕ
unsigned int mask;
// ЕїгУpoll_wait,НЋЕБЧАЕНЕШД§ЖгСаЗХЕНФкКЫЙмРэЯЕЭГжа
poll_wait(filp, &key_dev->wq_head, pts);
// 1,ЕБУЛгаЪ§ОнЕНЪБКђЗЕЛивЛИі0
if(!key_dev->key_state)
mask = 0;
// 2,гаЪ§ОнЗЕЛивЛИіPOLLIN
if(key_dev->key_state)
mask |= POLLIN;
return mask;
}
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊ
ЫФЁЂвьВНЭЈаХ
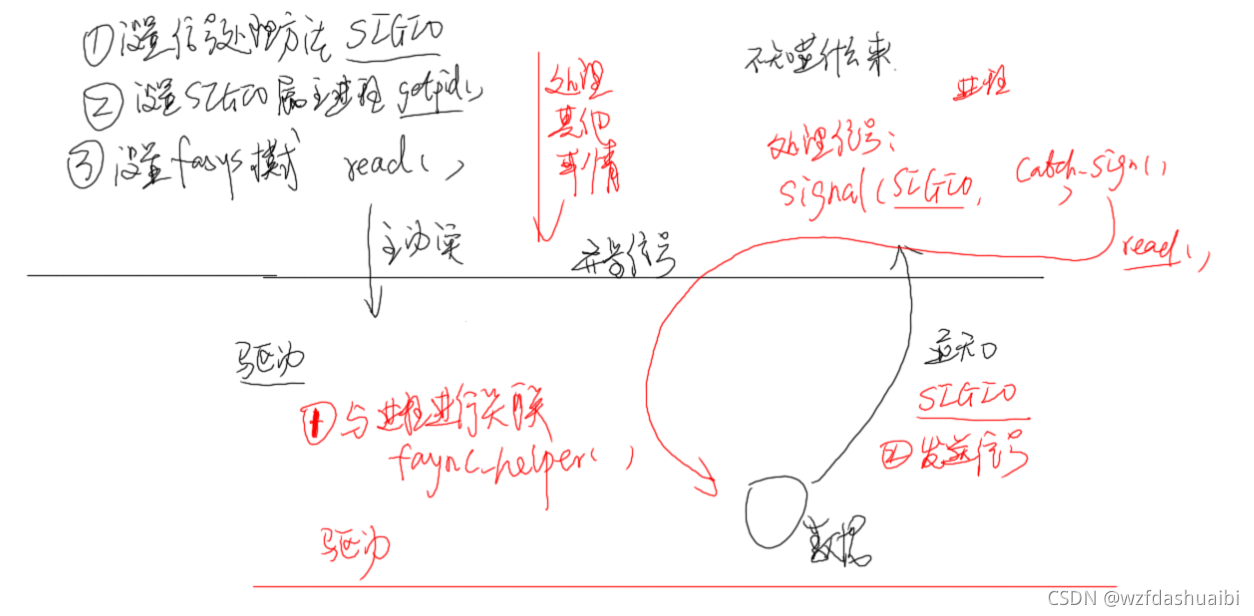
вьВНЭЈаХОЭЪЧЮвгІгУГЬађе§ГЃЕФЕФдЫаа,ЕЋФуЪВУДЪБКђвЊЗЂЪ§ОнИјЮвЕФЪБКђ,ФуОЭИјЮввЛИіаХКХ,ЮвШЅДІРэФуИјЮвЕФаХКХЁЃЧАУцЖМЪЧгІгУГЬађжїЖЏЕФЕШД§Ъ§ОнЕФЕНРД,ЖјвьВНЭЈаХдђЪЧРрЫЦгкаХКХжаЖЯЕФИХФюЁЃ
ЩшжУвьВНаХКХЕФВНжш:
1,ЩшжУаХКХДІРэЗНЗЈ
signal(SIGIO,signale_headle); ВЮЪ§вЛ:SIGIO етРягУзїаХКХДЋЫЭ ВЮЪ§Жў:аХКХЕФДІРэЗНЗЈ(КЏЪ§)
ЕБSIGIOгааХКХЕФЪБКђ,ОЭЛсжДааsignale_headleетИіДІРэКЏЪ§
2,НЋЕБЧАНјГЬЩшжУГЩSIGIOЕФЪєжїНјГЬ
fcntl(fd, F_SETOWN, getpid());
ВЮЪ§вЛ,ЕБЧАДђПЊЕФЮФМўУшЪіЗћ ВЮЪ§Жў:ЩшжУOWnОЭЪЧЩшжУздМК ВЮЪ§Ш§:ЛёШЁЕБЧАНјГЬPIDКХЁЃ
НЋЕБЧАНјГЬЩшжУГЩSIGIOЕФЪєжїНјГЬ:етбљSIGNOЕФаХКХОЭЛсЗЂЕНетИіНјГЬжаРД,вЊВЛШЛТвЗЂЕФШЅ
3,НЋioФЃЪНЩшжУГЩвьВНФЃЪН
int flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | FASYNC );
ВЮЪ§вЛ:ДђПЊЕФЮФМўУшЪіЗћ,ОЭЪЧЧ§ЖЏЩшБИ ВЮЪ§Жў:ЩшжУБъжО ВЮЪ§Ш§вЊЩшжУЕФБъжОЁЃ
етбљОЭЭъГЩСЫвьВНЭЈаХЕФЩшжУЁЃдйЭъГЩжаЖЯДІРэКЏЪ§,ШУаХКХРДЕФЪБКђ,ФувЊзіОЭзіЪВУДЁЃ
Ч§ЖЏГЬађ
b,Ч§ЖЏЈCЗЂЫЭаХКХ
1,ашвЊКЭНјГЬНјааЙиСЊЈCМЧТМаХКХИУЗЂЫЭИјЫ
ЪЕЯжвЛИіfasyncЕФНгПкКЭREAD,OPENЕШЮФМўВйзївЛбљетЪЧвЛИіЮФМўВйзїНгПкЁЃВйзїЫќОЭПЩвдЪЕЯжвьВНЭЈжЊ
int key_drv_fasync(int fd, struct file *filp, int on)
{
//жЛашвЊЕїгУвЛИіКЏЪ§МЧТМаХКХИУЗЂЫЭИјЫ
return fasync_helper(fd, filp, on, &key_dev->faysnc);
}
2,дкФГИіЬиЖЈЕФЪБКђШЅЗЂЫЭаХКХ,дкгаЪ§ОнЕФЪБКђ
//ЗЂЫЭаХКХ
kill_fasync(&key_dev->faysnc, SIGIO, POLLIN);
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊгІгУГЬађЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊ
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <poll.h>
#include <signal.h>
struct key_event{
int code; // БэЪОАДМќЕФРраЭ: home, esc, Q,W,E,R,T, ENTER
int value; // БэЪОАДЯТЛЙЪЧЬЇЦ№ 1 / 0
};
#define KEY_ENTER 28
static int fd;
static struct key_event event;
void catch_signale(int signo)
{
if(signo == SIGIO)
{
printf("we got sigal SIGIO\n");
// ЖСШЁЪ§Он
read(fd, &event, sizeof(struct key_event));
if(event.code == KEY_ENTER)
{
if(event.value)
{
printf("APP__ key enter pressed\n");
}else
{
printf("APP__ key enter up\n");
}
}
}
}
int main(int argc, char *argv[])
{
int ret;
fd = open("/dev/key0", O_RDWR);
if(fd < 0)
{
perror("open");
exit(1);
}
// 1,ЩшжУаХКХДІРэЗНЗЈ
signal(SIGIO,catch_signale);
// 2,НЋЕБЧАНјГЬЩшжУГЩSIGIOЕФЪєжїНјГЬ
fcntl(fd, F_SETOWN, getpid());
// 3,НЋioФЃЪНЩшжУГЩвьВНФЃЪН
int flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | FASYNC );
while(1)
{
// ПЩвдзіЦфЫћЕФЪТЧщ
printf("I am waiting......\n");
sleep(1);
}
close(fd);
return 0;
}
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЧ§ЖЏГЬађЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊ
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/slab.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <asm/io.h>
#include <asm/uaccess.h>
#define GPXCON_REG 0x11000C20
#define KEY_ENTER 28
// ЩшМЦвЛИіУшЪіАДМќЕФЪ§ОнЕФЖдЯѓ
struct key_event{
int code; // БэЪОАДМќЕФРраЭ: home, esc, Q,W,E,R,T, ENTER
int value; // БэЪОАДЯТЛЙЪЧЬЇЦ№ 1 / 0
};
//ЩшМЦвЛИіШЋОжЩшБИЖдЯѓ--УшЪіАДМќаХЯЂ
struct key_desc{
unsigned int dev_major;
struct class *cls;
struct device *dev;
int irqno;
void *reg_base;
struct key_event event;
wait_queue_head_t wq_head;
int key_state; //БэЪОЪЧЗёгаЪ§Он
struct fasync_struct *faysnc;
};
struct key_desc *key_dev;
irqreturn_t key_irq_handler(int irqno, void *devid)
{
printk("-------%s-------------\n", __FUNCTION__);
//ЖСШЁЪ§ОнМФДцЦї
int value = readl(key_dev->reg_base + 4) & (1<<2);
if(value){ // ЬЇЦ№
printk("key3 up\n");
key_dev->event.code = KEY_ENTER;
key_dev->event.value = 0;
}else{//АДЯТ
printk("key3 pressed\n");
key_dev->event.code = KEY_ENTER;
key_dev->event.value = 1;
}
// БэЪОгаЪ§Он,ашвЊШЅЛНабећИіНјГЬ/ЕШД§ЖгСа
wake_up_interruptible(&key_dev->wq_head);
//ЭЌЪБЩшжУБъжОЮЛ
key_dev->key_state = 1;
//ЗЂЫЭаХКХ
kill_fasync(&key_dev->faysnc, SIGIO, POLLIN);
return IRQ_HANDLED;
}
int get_irqno_from_node(void)
{
// ЛёШЁЕНЩшБИЪїжаЕННкЕу
struct device_node *np = of_find_node_by_path("/key_int_node");
if(np){
printk("find node ok\n");
}else{
printk("find node failed\n");
}
// ЭЈЙ§НкЕуШЅЛёШЁЕНжаЖЯКХТы
int irqno = irq_of_parse_and_map(np, 0);
printk("irqno = %d\n", irqno);
return irqno;
}
int key_drv_open(struct inode *inode, struct file *filp)
{
printk("-------%s-------------\n", __FUNCTION__);
return 0;
}
ssize_t key_drv_read(struct file *filp, char __user *buf, size_t count, loff_t *fpos)
{
//printk("-------%s-------------\n", __FUNCTION__);
//ШчЙћЕБЧАЪЧЗЧзшШћФЃЪН,ВЂЧвУЛгаЪ§Он,СЂТэЗЕЛивЛИіГіДэТы
if(filp->f_flags & O_NONBLOCK && !key_dev->key_state)
return -EAGAIN;
int ret;
//2,дкашвЊЕШД§(УЛгаЪ§Он)ЕФЪБКђ,НјааанУп
wait_event_interruptible(key_dev->wq_head, key_dev->key_state);
// БэЪОгаЪ§Он
ret = copy_to_user(buf, &key_dev->event, count);
if(ret > 0)
{
printk("copy_to_user error\n");
return -EFAULT;
}
// ДЋЕнИјгУЛЇЪ§ОнжЎКѓ,НЋЪ§ОнЧхГ§Еє
memset(&key_dev->event, 0, sizeof(key_dev->event));
key_dev->key_state = 0;
return count;
}
ssize_t key_drv_write(struct file *filp, const char __user *buf, size_t count, loff_t *fpos)
{
printk("-------%s-------------\n", __FUNCTION__);
return 0;
}
int key_drv_close (struct inode *inode, struct file *filp)
{
printk("-------%s-------------\n", __FUNCTION__);
return 0;
}
unsigned int key_drv_poll(struct file *filp, struct poll_table_struct *pts)
{
// ЗЕЛивЛИіmaskжЕ
unsigned int mask;
// ЕїгУpoll_wait,НЋЕБЧАЕНЕШД§ЖгСазЂВсЯЕЭГжа
poll_wait(filp, &key_dev->wq_head, pts);
// 1,ЕБУЛгаЪ§ОнЕНЪБКђЗЕЛивЛИі0
if(!key_dev->key_state)
mask = 0;
// 2,гаЪ§ОнЗЕЛивЛИіPOLLIN
if(key_dev->key_state)
mask |= POLLIN;
return mask;
}int key_drv_fasync(int fd, struct file *filp, int on)
{
//жЛашвЊЕїгУвЛИіКЏЪ§МЧТМаХКХИУЗЂЫЭИјЫ
return fasync_helper(fd, filp, on, &key_dev->faysnc);
}
const struct file_operations key_fops = {
.open = key_drv_open,
.read = key_drv_read,
.write = key_drv_write,
.release = key_drv_close,
.poll = key_drv_poll,
.fasync = key_drv_fasync,
};
static int __init key_drv_init(void)
{
//бнЪОШчКЮЛёШЁЕНжаЖЯКХ
int ret;
// 1,ЩшЖЈвЛИіШЋОжЕФЩшБИЖдЯѓ
key_dev = kzalloc(sizeof(struct key_desc), GFP_KERNEL);
// 2,ЩъЧыжїЩшБИКХ
key_dev->dev_major = register_chrdev(0, "key_drv", &key_fops);
// 3,ДДНЈЩшБИНкЕуЮФМў
key_dev->cls = class_create(THIS_MODULE, "key_cls");
key_dev->dev = device_create(key_dev->cls, NULL,
MKDEV(key_dev->dev_major,0), NULL, "key0");
// 4,гВМўЕФГѕЪМЛЏ--ЕижЗгГЩфЛђепжаЖЯЩъЧы
key_dev->irqno = get_irqno_from_node();
ret = request_irq(key_dev->irqno, key_irq_handler, IRQF_TRIGGER_FALLING|IRQF_TRIGGER_RISING,
"key3_eint10", NULL);
if(ret != 0)
{
printk("request_irq error\n");
return ret;
}
// a,гВМўШчКЮЛёШЁЪ§Он--gpx1
key_dev->reg_base = ioremap(GPXCON_REG, 8);
// ГѕЪМЛЏЕШД§ЖгСаЭЗ
init_waitqueue_head(&key_dev->wq_head);
return 0;
}
static void __exit key_drv_exit(void)
{
iounmap(key_dev->reg_base);
free_irq(key_dev->irqno, NULL);
device_destroy(key_dev->cls, MKDEV(key_dev->dev_major,0));
class_destroy(key_dev->cls);
unregister_chrdev(key_dev->dev_major, "key_drv");
kfree(key_dev);
}
module_init(key_drv_init);
module_exit(key_drv_exit);
MODULE_LICENSE("GPL");
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊ
етИіЧ§ЖЏГЬађЪЕЯжСЫЖржжIOФЃаЭЕФНгПк,
зшШћ:дкreadНгПкжага wait_event_interruptible :гІгУГЬађШчЙћВЛЩшжУЗЧзшШћОЭЪЧзшШћФЃЪНЁЃ
ЗЧзшШћ:дкREADНгПкжага:ХаЖЯfpЕФflag,ШчЙћЮЊзшШћФЃЪНОЭжДааЗЧзшШћФЃЪН
ЖрТЗИДгУ:гІгУВуЕїгУСЫpollНгПкжЎКѓ,ОЭПЩвдЪЕЯжЖрТЗИДгУ
вьВНЭЈаХ:гІгУВуЕїгУСЫfasyncНгПкжЎКѓ,ОЭПЩвдЪЕЯжЖрТЗИДгУ
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊ
ЫФжжIOФЃаЭЕФзмНс:ЪВУДЪБКђгУ
ЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊЁЊend