ШчЬт етжжГЄЗНЬхПЩвддкШ§ЮЌПеМфжаШЮвта§зЊ
етИіЪЧЕБЪБВЮПМЕФдРэ https://blog.csdn.net/hit1524468/article/details/79857665
вдЯТДњТыЪЧетжжЫМТЗЕФЪЕЯж ВЛЯыПДЕФЛАПЩвджБНгЪЙгУ
вЊЪЙгУЕФЛАБиаыАДеевЛЖЈЕФЙцдђРДЪЙгУ,ШчЯТЭМ
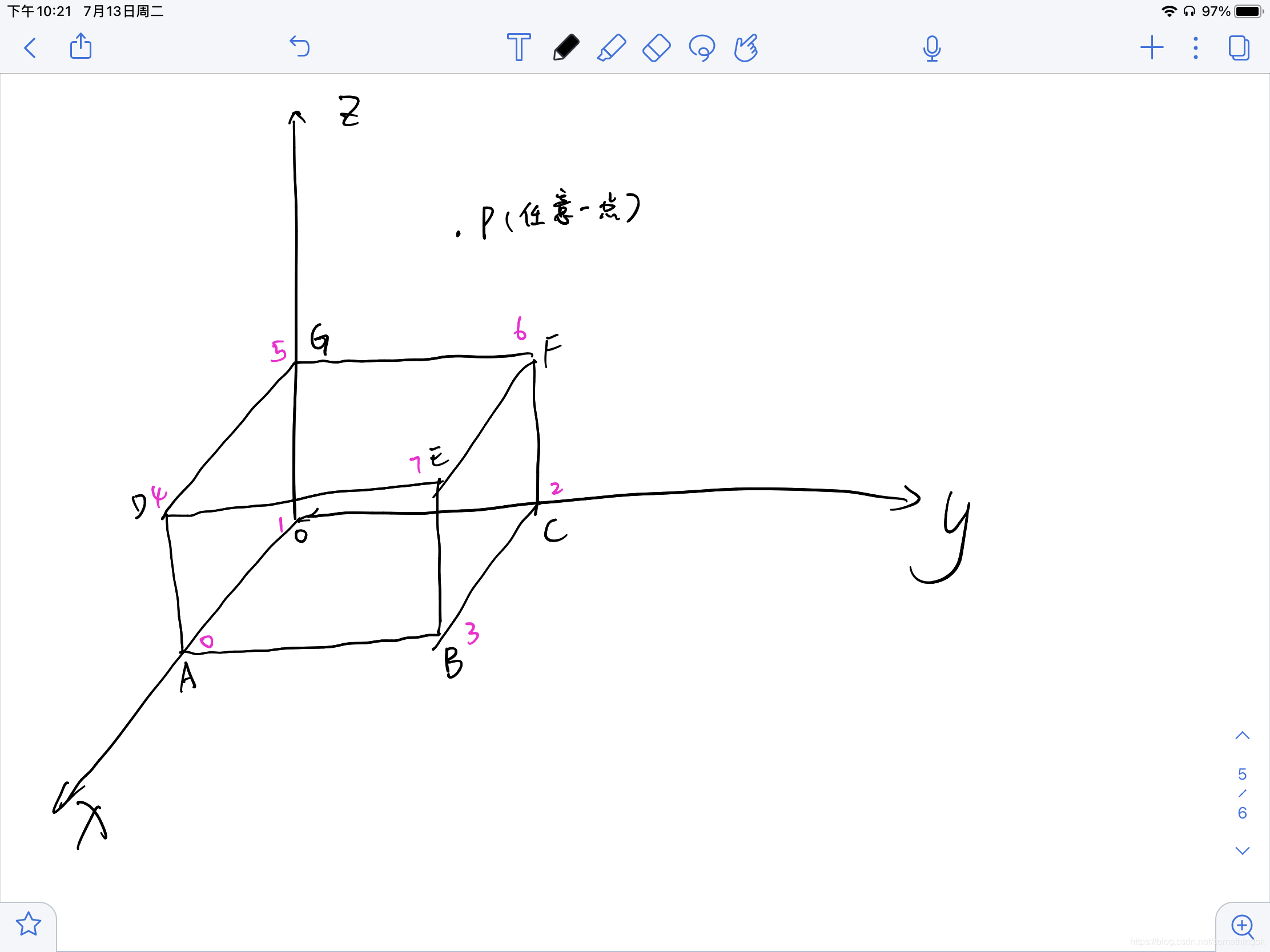
pЕуЮЊФувЊХаЖЯЕФЪЧЗёдкПщЬхжаЕФЕу,етРязЂвтПщЬхЕФ8ИіЕуЕФЫГађЁЃЮвЪЧгУздЖЈвхНсЙЙXYZЕФЪ§зщРДДцДЂет8ИіЕуЕФ,ЫГађвЛЖЈВЛФмДэЁЃАДееЭМжаЗлЩЋзжЫГађЗХШыЪ§зщЁЃБШШчcuboid[0]ЕФx,y,zзјБъвЛЖЈЪЧЖдгІAЕФетИіЕу,ШчЙћетИіПщЬхЪЧа§зЊЕФ,ВЛЪЧАДЭМжаетбљЙцдђЕФАкЗХ,ФуПЩвдздМКЩшЖЈ[0]ЖдгІЕФЕу,ЕЋЪЧетИіЕуШЗЖЈКѓ,вЊАДЭМжаЕФЫГађМЬајЗХШыЁЃЕУЕНетбљЕФЪ§зщКѓ,КЭвЊХаЖЯЕФЕувЛЦ№ДЋШыКЏЪ§МДПЩ,ЗЕЛиtrueДњБэЕудкПщЬхФк,ЗЕЛиfalseДњБэЕуВЛдкПщЬхФкЁЃШчЙћЕудкПщЬхЕФБпНчЩЯ,вВЫуВЛдкПщЬхФк,ШчЙћЯыЫудкПщЬхФкашвЊАбзюКѓifХаЖЯЕФЫљгаЕФ<0ИФЮЊ<=ЁЃ
typedef struct { // ЕуЕФНсЙЙЖЈвх
double x,y,z;
} XYZ;
bool pointIsInsideCuboid( XYZ p,XYZ* cuboid )
{
//ЪзЯШХаЖЯЕуЪЧЗёдкзѓгвСНУцЕФжаМф ДЫЪБЗЈЯпЮЊyжс
XYZ vector_DP;
XYZ vector_EP;
XYZ vector_DE;//ЗЈЯпy
//МЦЫуЯђСПDE
vector_DE.x=cuboid[7].x-cuboid[4].x;vector_DE.y=cuboid[7].y-cuboid[4].y;vector_DE.z=cuboid[7].z-cuboid[4].z;
//МЦЫуЯђСПDP
vector_DP.x=p.x-cuboid[4].x;vector_DP.y=p.y-cuboid[4].y;vector_DP.z=p.z-cuboid[4].z;
//МЦЫуЯђСПEP
vector_EP.x=p.x-cuboid[7].x;vector_EP.y=p.y-cuboid[7].y;vector_EP.z=p.z-cuboid[7].z;
//МЦЫуЯђСПЕуГЫЕФНсЙћ
//DPЕуГЫDE
double DP_DE;
DP_DE=vector_DP.x*vector_DE.x+vector_DP.y*vector_DE.y+vector_DP.z*vector_DE.z;
//EPЕуГЫDE
double EP_DE;
EP_DE=vector_EP.x*vector_DE.x+vector_EP.y*vector_DE.y+vector_EP.z*vector_DE.z;
//ШЛКѓХаЖЯЕуЪЧЗёдкЩЯЯТСНУцЕФжаМф ДЫЪБЗЈЯпЮЊzжс
/*XYZ vector_DP;*/ //DPвбОДцдкСЫ жБНггУЩЯУцЕФ
XYZ vector_AP;
XYZ vector_AD;//ЗЈЯпy
//МЦЫуЯђСПAP
vector_AP.x=p.x-cuboid[0].x;vector_AP.y=p.y-cuboid[0].y;vector_AP.z=p.z-cuboid[0].z;
//МЦЫуЯђСПAD
vector_AD.x=cuboid[4].x-cuboid[0].x;vector_AD.y=cuboid[4].y-cuboid[0].y;vector_AD.z=cuboid[4].z-cuboid[0].z;
//МЦЫуЯђСПЕуГЫЕФНсЙћ
//AD AP
double AD_AP;
AD_AP=vector_AD.x*vector_AP.x+vector_AD.y*vector_AP.y+ vector_AD.z*vector_AP.z;
//AD DP
double AD_DP;
AD_DP=vector_AD.x*vector_DP.x+vector_AD.y*vector_DP.y+ vector_AD.z*vector_DP.z;
//зюКѓХаЖЯЕуЪЧЗёдкЧАКѓСНУцЕФжаМф ДЫЪБЗЈЯпЮЊxжс
XYZ vector_OA;//ЗЈЯп
XYZ vector_OP;
/*XYZ vector_AP;*/ //вбга
vector_OA.x=cuboid[0].x;vector_OA.y=cuboid[0].y;vector_OA.z=cuboid[0].z;
vector_OP.x=p.x;vector_OP.y=p.y;vector_OP.z=p.z;
//МЦЫуЯђСПЕуГЫЕФНсЙћ
//OP OA
double OP_OA;
OP_OA=vector_OP.x*vector_OA.x+vector_OP.y*vector_OA.y+vector_OP.z*vector_OA.z;
//AP OA
double AP_OA;
AP_OA=vector_AP.x*vector_OA.x+vector_AP.y*vector_OA.y+vector_AP.z*vector_OA.z;
if (DP_DE*EP_DE<0&&AD_AP*AD_DP<0&&OP_OA*AP_OA<0)
{
return true;
}else
{
return false;
}
}