��СԲ���Ǿ����㷨
��ʾ:�����������ϵ�����µ��������µ�Ŀ¼,Ŀ¼��Ҫ�Լ��ֶ�����
����:��һ�� Python ����ѧϰ����֮pandas��ʹ��
��ʾ:д�����º�,Ŀ¼�����Զ�����,������ɿɲο��ұߵİ����ĵ�
ǰ��
�����:
https://en.wikipedia.org/wiki/Smallest-circle_problem
ά���ٿ��Ϲ�����СԲ�����к�ȫ�������(��Ҫ��ѧ����)
https://baike.baidu.com/item/%E6%9C%80%E5%B0%8F%E5%9C%86%E8%A6%86%E7%9B%96%E7%AE%97%E6%B3%95/22799983
�ٶ�Ҳ��
��ʾ:�����DZ�ƪ������������,���永���ɹ��ο�
һ��ԭ��
Welzl���㷨
���㷨�ǵݹ��,���ҽ�����(����)��P��R��Ϊ����;������P��R���ϵ���С��ΧԲ,ֻҪR��ÿ���㶼��������С��ΧԲ�ı߽��֮һ�����,ԭʼ����С��ΧԲ�������ͨ�������㷨�����,����P����Ҫ��յĵ㼯��,R���ڿռ���;���㷨�ݹ��������ʱ,�����Ŵݸ��ݹ���õļ���R,ֱ��������Բ�����б߽�㡣
�������㷨�����˳����P�ĵ�,���ִ�����ļ���S�Ͱ�������S��R����СԲD.��ÿһ��,��������һ��Ҫ�����ĵ�p�Ƿ�����D;�������,���㷨�ü���S��R��p�ϵ��㷨�ĵݹ���õĽ���滻D.����Բ�Ƿ��滻,p���������ڼ���S�С����,����ÿ��������ں㶨ʱ���ڲ��Ըõ��Ƿ����ڵ���Բ���ҿ���ִ�ж��㷨�ĵݹ���á����Կ���,��ʱ�������Եġ�
algorithm welzl:
input: Finite sets P and R of points in the plane
output: Minimal disk enclosing P with R on the boundary, or undefined if no such disk exists
if P is empty or |R| �� 3:
if |R| = 1:
(we do this to support multisets with duplicate points)
(we assume that a circle with a radius of zero can exist)
p := R[0]
return circle(p, 0)
else if |R| = 2:
(we do this to support multisets with duplicate points)
(we use that the smallest circle between two points has a center at their midpoint)
(and the segment that passes through them is a diameter of the circle)
p0 := R[0]
p1 := R[1]
center := midpoint(p0, p1)
diameter := distance(p0, p1)
return circle(center, diameter / 2)
else if the points of R are cocircular:
return the ball they determine
else:
return undefined
choose p in P (randomly and uniformly)
D := welzl(P - { p }, R)
if p is in D:
return D
return welzl(P - { p }, R �� { p })
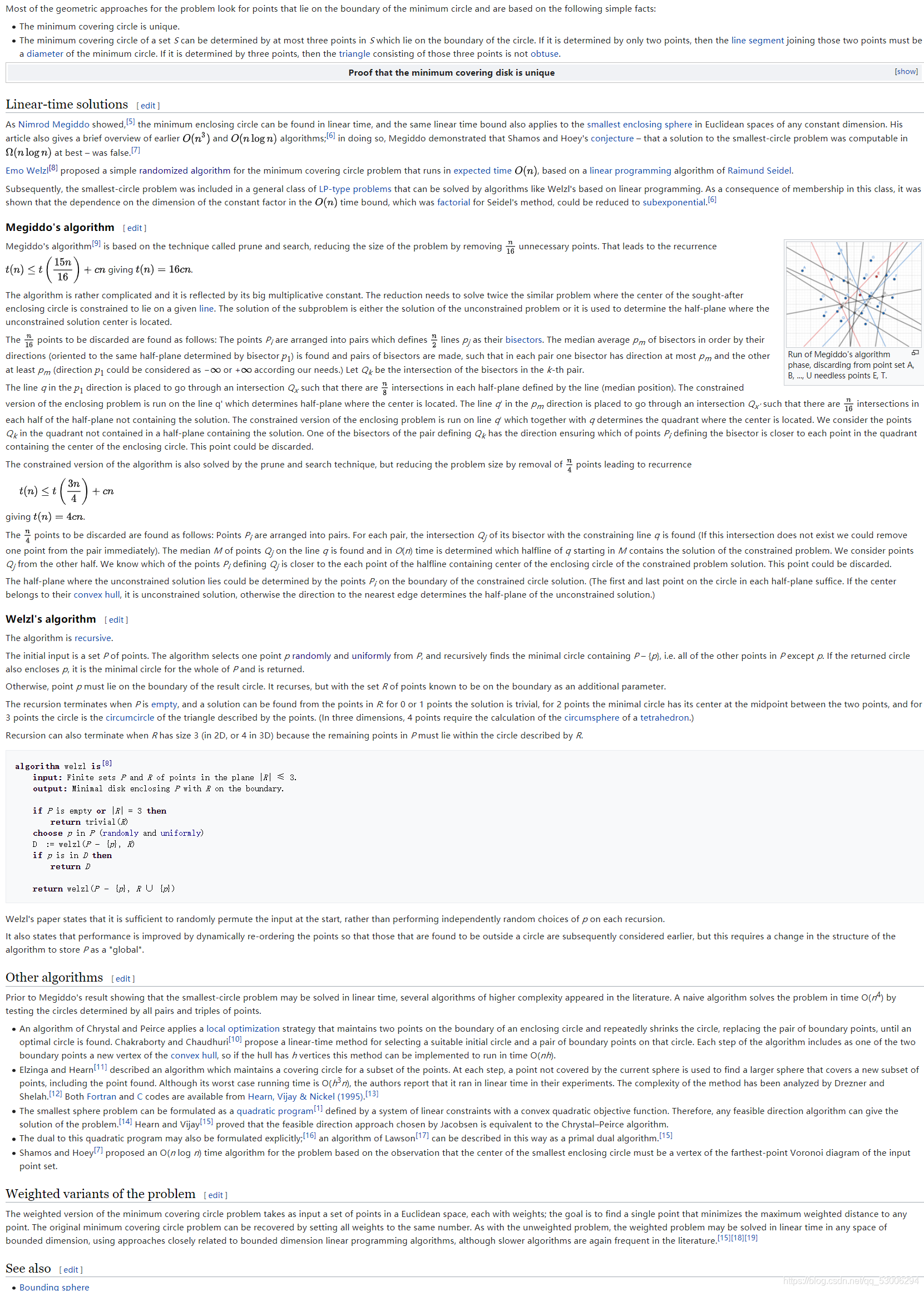
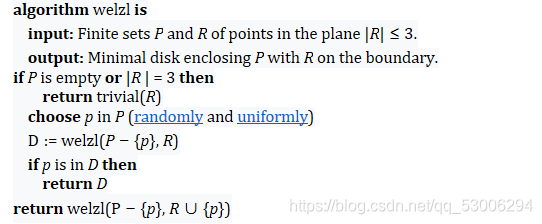
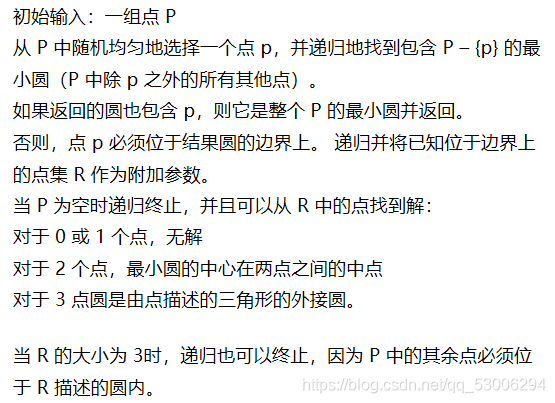
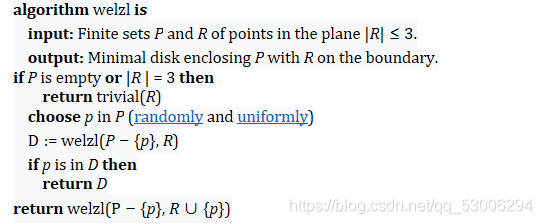
The algorithm is recursive.
The initial input is a set P of points. The algorithm selects one point p randomly and uniformly from P, and recursively finds the minimal circle containing P �C {p}, i.e. all of the other points in P except p. If the returned circle also encloses p, it is the minimal circle for the whole of P and is returned.
Otherwise, point p must lie on the boundary of the result circle. It recurses, but with the set R of points known to be on the boundary as an additional parameter.
The recursion terminates when P is empty, and a solution can be found from the points in R: for 0 or 1 points the solution is trivial, for 2 points the minimal circle has its center at the midpoint between the two points, and for 3 points the circle is the circumcircle of the triangle described by the points. (In three dimensions, 4 points require the calculation of the circumsphere of a tetrahedron.)
Recursion can also terminate when R has size 3 (in 2D, or 4 in 3D) because the remaining points in P must lie within the circle described by R.
Welzl��s paper states that it is sufficient to randomly permute the input at the start, rather than performing independently random choices of p on each recursion.
It also states that performance is improved by dynamically re-ordering the points so that those that are found to be outside a circle are subsequently considered earlier, but this requires a change in the structure of the algorithm to store P as a ��global��.
�����㷨ʵ��
1.�㷨��������
���,Welzlָ��ͨ����̬�������������������,�Ա�������ؿ�����Щ��������Բ��ĵ㡣
2.����
��������:
#include <vector>
#include <iostream>
#include <stdlib.h>
#include <time.h>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
typedef vector<Point> Points;
class Circle
{
public:
Circle(Point2f c, double r) :center(c), radius(r) {}
double radius;
Point2f center;
friend ostream & operator<<(ostream& output, Circle &c);
};
ostream & operator<<(ostream& output, Circle &c)
{
output << c.center << "," << c.radius;
return output;
}
//ay+bx+c=0
class LinearEquation
{
public:
LinearEquation() {}
//����
LinearEquation(int _a, int _b, int _c) :a(_a), b(_b), c(_c) {}
//����ʽ
LinearEquation(Point A, Point B) {
a = (A.x - B.x);
b = -(A.y - B.y);
c = (A.y*B.x - A.x*B.y);
}
//��бʽ
LinearEquation(double _a, double _b, Point A) {
a = _a;
b = _b;
c = -(_a*A.y + _b*A.x);
}
double getA() { return a; }
double getB() { return b; }
double getC() { return c; }
double getSlope() { return -b / a; }
double getIntercept() { return -c / a; }
friend void Get2LinesIntersection(LinearEquation &l1, LinearEquation &l2, Point2f &intersection);
friend double distance(Point2f A, Point2f B);
private:
double a, b, c;
};
//�����߽���
void Get2LinesIntersection(LinearEquation &l1, LinearEquation &l2, Point2f &intersection)
{
intersection.x = -(l1.a *l2.c - l2.a*l1.c) / (l1.a*l2.b - l2.a*l1.b);
intersection.y = (l1.b *l2.c - l2.b*l1.c) / (l1.a*l2.b - l2.a*l1.b);
}
//���������
double distance(Point2f A, Point2f B)
{
return sqrt((A.x - B.x)*(A.x - B.x) + (A.y - B.y)*(A.y - B.y));
}
//��ȡ������СԲ����
//����:�д��߽���(����)Ϊ���ԲԲ��
Circle GetMinCircleOf3Points(vector<Point> &v3)
{
Point2f center;
double radius;
// two edges of the triangle v1, v2
LinearEquation l1(v3[0], v3[1]);
LinearEquation l2(v3[0], v3[2]);
Point2f midPoint1 = (v3[1] + v3[0]) / 2.0;
Point2f midPoint2 = (v3[2] + v3[0]) / 2.0;
LinearEquation midperpendicular1(l1.getB(), -l1.getA(), midPoint1),
midperpendicular2(l2.getB(), -l2.getA(), midPoint2);
// center is intersection of midperpendicular lines of the two edges v1, v2
Get2LinesIntersection(midperpendicular1, midperpendicular2, center);
radius = distance(center, v3[0]);
return Circle(center, radius);
}
//��ȡ������СԲ����
Circle GetMinCircleOf2Points(vector<Point> &v2)
{
Point2f center = (v2[0] + v2[1]) / 2;
double radius = distance(v2[0], v2[1])/2;
return Circle(center, radius);
}
//����Բ��?
bool isPointInCircle(Circle c, Point2f p)
{
return distance(p, c.center) < c.radius ? true : false;
}
/*algorithm welzl is
input : Finite sets P and R of points in the plane | R | �� 3.
output : Minimal disk enclosing P with R on the boundary.
if P is empty or | R | = 3 then
return trivial(R)
choose p in P(randomly and uniformly)
D : = welzl(P ?{ p }, R)
if p is in D then
return D
return welzl(P ?{ p }, R ��{ p })*/
Circle welzl(Points P, Points R)
{
if (R.size() == 3)
{
return GetMinCircleOf3Points(R);
}
else if (P.empty())
{
if (R.size() < 2)
return Circle(Point2f(0, 0), 0);
else//R.size=2
return GetMinCircleOf2Points(R);
}
Point p = P.back();//pΪ���һ����
P.pop_back();//P-{p}
Circle C = welzl(P, R);//�ݹ����P-p��СԲ����
if (isPointInCircle(C, p))//��p��P-p����С����Բ��
return C;
R.push_back(p);//p��P-p����С����Բ��
return welzl(P, R);//pΪ�߽��,��¼��R��,�ݹ�Ѱ�ұ߽�����R
}
int main()
{
srand(time(0));
Points pts, bound;
int count = 4, bottom = 400, right = 400, left = 200, top = 200, img_rows = 600, img_cols = 600;
Mat img(Size(img_rows, img_cols), CV_8UC1);
img = 0;
cout << "���������:" << endl;
int r , c ;
for (int i=0;i<count;i++)
{
r = rand() % (bottom-top)+top;
c = rand() % (right-left)+left;
Point p (c, r);
pts.push_back(p);
circle(img, p, 2, 255);
cout << p;
}
cout << endl;
Circle cResult= welzl(pts, bound);
cout << cResult;
circle(img, cResult.center, cResult.radius, 255);
imshow("result", img);
waitKey();
return 0;
}
����Circle welzl(Points P, Points R)Ϊ���ĺ���,����PΪ����㼯,����NΪ�߽�㼯,��λ����С����Բ�ϵĵ�,����Ϊ��������������
����N�DZ߽�㼯,һ��λ����СԲ��,NΪ�����СԲ�Ĺؼ�,ͨ�������ݹ������
PΪ����㼯,ÿ�ݹ�һ�ξͼ�һ����
����N��3������PΪ�յݹ�ֹͣ��
���1:NΪ3��˵���߽���Ѿ������ˡ�
���2:PΪ�ա�NΪ2��һ������,���ܻ���һ����,���Ե�ͨ���ݹ��������ʣ���,������е㶼�����2���߽�㹹��Բ����(���������߽��Ϊֱ����Բ),Ҳ����PΪ��(���е㶼������һ��),��ݹ�Ҳ���Խ�����