文章目录
前言
因为使用的kinova机械臂建议在Ubuntu系统下运行官方软件,这两天学习了一下Ubuntu系统的使用,记录了所用版本的各软件的环境配置,本文基于 Ubuntu 16.04 、 coppeliaSim 4.0 以及 QTcreator 5.14.1 完成
提示:本文参考的其余版本教程如下:
Ubuntu下使用VREP的C++b0API
ubuntu16.04下安装v-rep
ubuntu14.04安装V-REP和用户使用手册
Ubuntu下使用VREP的Legacy remote API(C++)
V-Rep虚拟机器人实验平台在Ubuntu18.04LTS安装与使用笔记
Ubuntu16 基于qt C++与vrep/coppeliasim通讯
一、vrep和qtcreator的安装
参照上面的教程分别安装好Ubuntu16.04系统对应的vrep和qtcreator软件。
二、配置环境
1.在QTcreator内新建c++ 应用程序
各种配置选默认即可

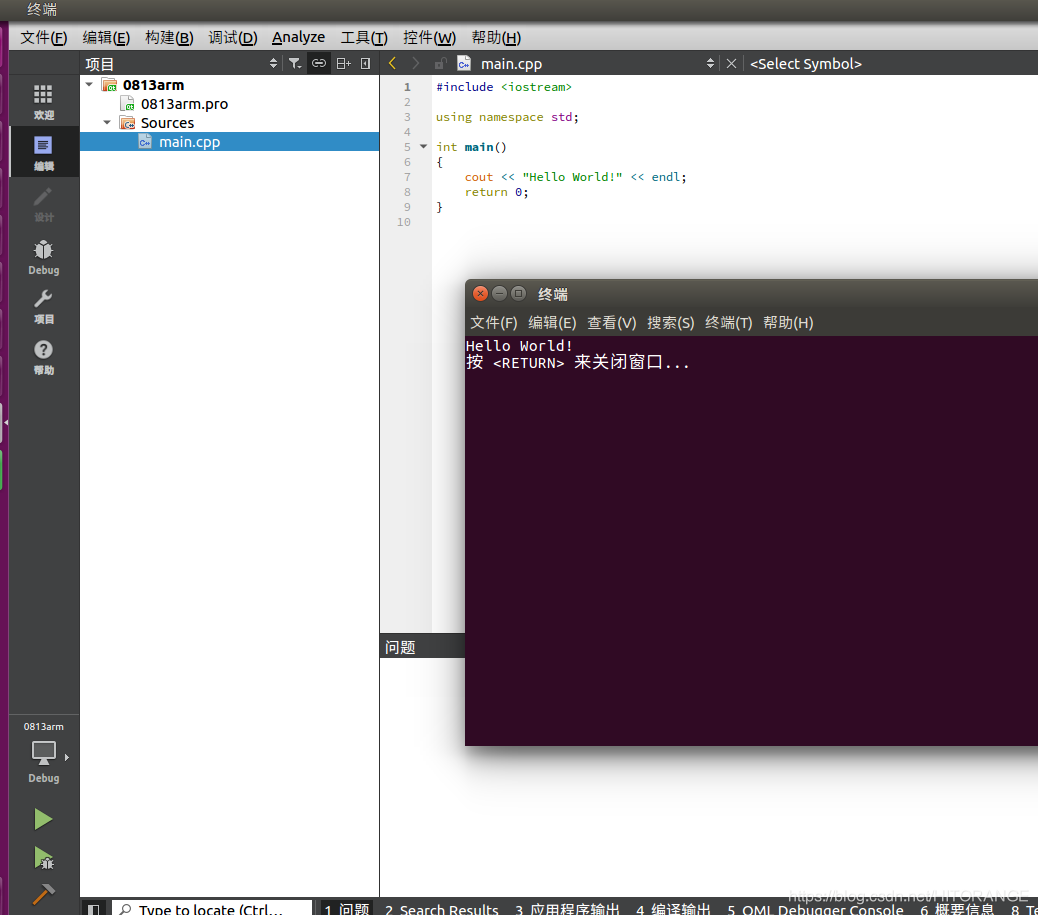
新建工程直接构建可以运行,结果如下:
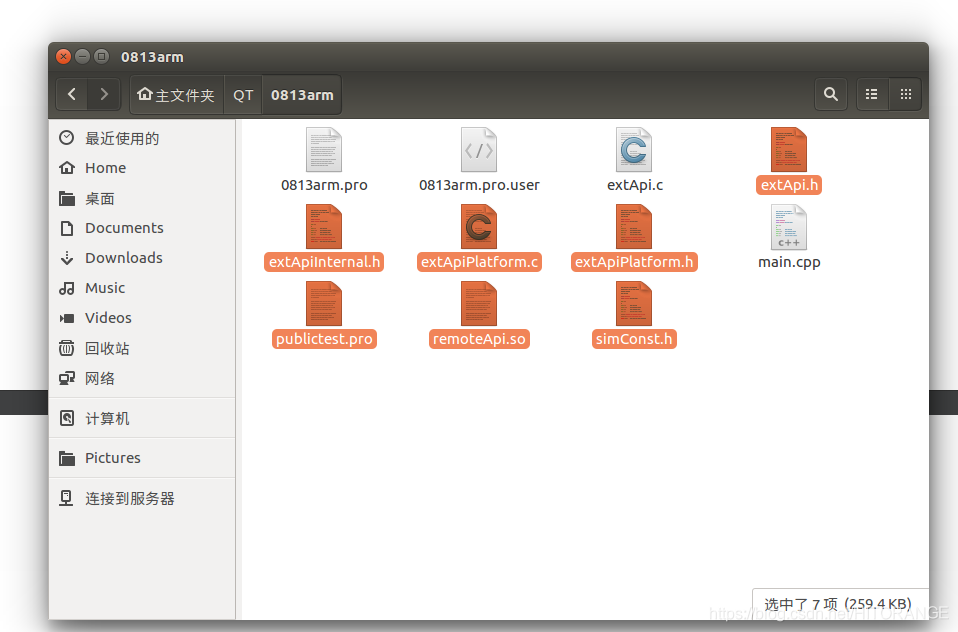
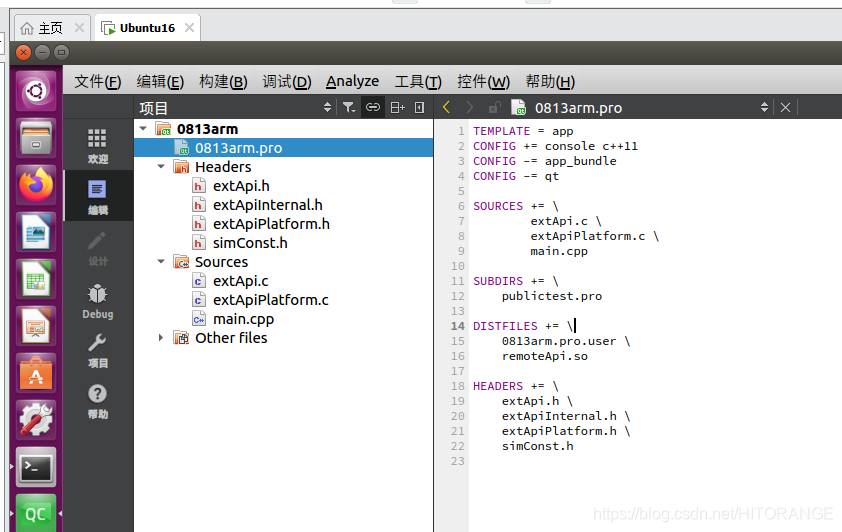
在vrep文件夹下的programing/remoteapi , programming/include 以及 programming/remoteApiBindings/lib/lib/Ubuntu16_04 文件夹中找到下图的七个文件,复制到QT建立的工程文件夹内,并添加现有文件到项目中。
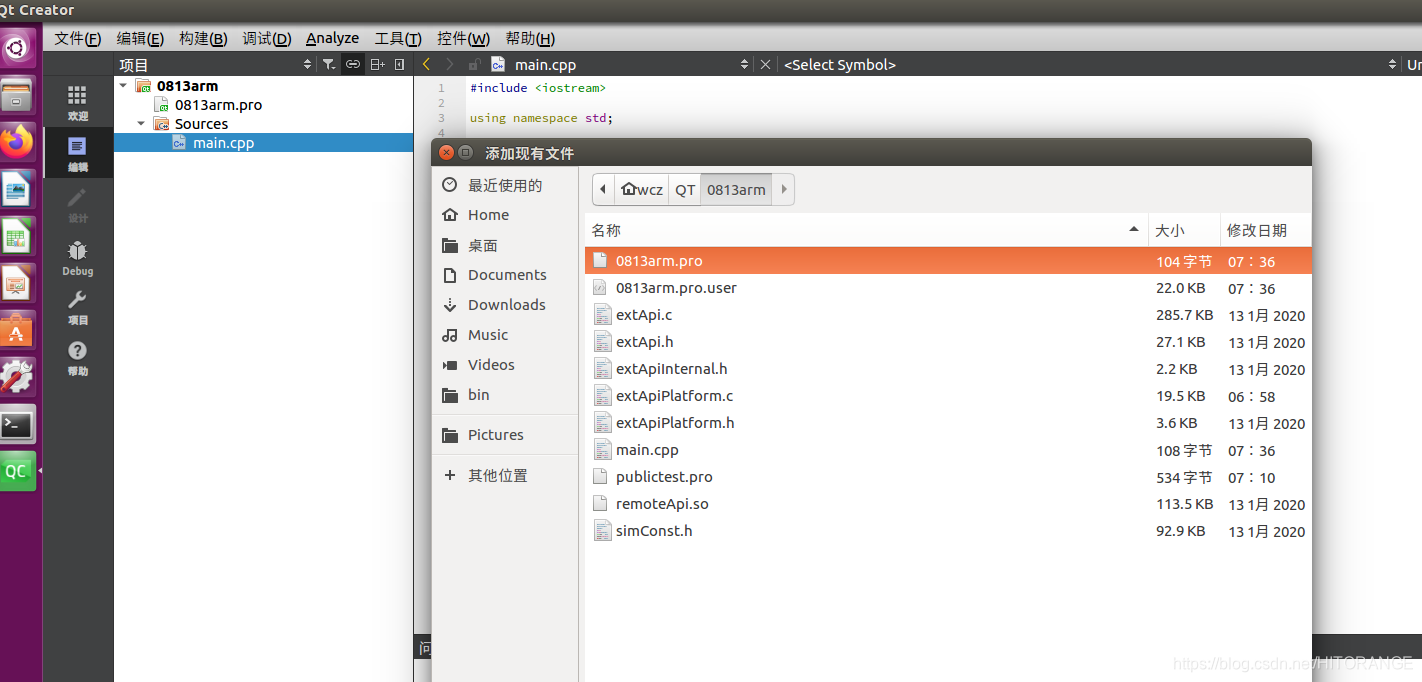
此时.pro文件如图
2 . 在.pro文件中添加预定义配置信息
添加配置如下
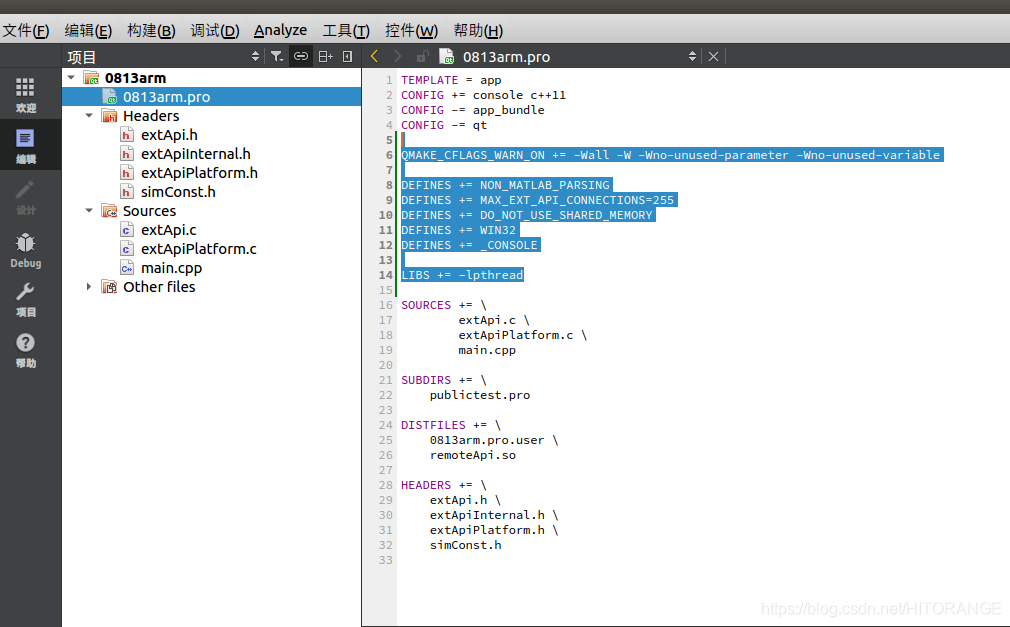
代码如下:
QMAKE_CFLAGS_WARN_ON += -Wall -W -Wno-unused-parameter -Wno-unused-variable
DEFINES += NON_MATLAB_PARSING
DEFINES += MAX_EXT_API_CONNECTIONS=255
DEFINES += DO_NOT_USE_SHARED_MEMORY
DEFINES += WIN32
DEFINES += _CONSOLE
LIBS += -lpthread
设置完成后构建工程可运行打印hello world。
三、与vrep联合仿真
1. c++代码
代码如下:
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
extern "C" {
#include "extApi.h"
}
int main()
{
int Port = 19997;
int PositionControlHandle;
float position[3];
float positionmove[3];
//智能制造单元控制系统 Intelligent manufacturing unit control system
//imucs
int clientID = simxStart("127.0.0.1", Port, true, true, 2000, 5);
if (clientID != -1)
{
printf("V-rep connected.");
int count = 0;
//extApi_sleepMs(300);
while (simxGetConnectionId(clientID) != -1)
{
count++;
//simxGetObjectHandle(clientID, "IRB140_manipulationSphere", &PositionControlHandle, simx_opmode_oneshot);
//simxGetObjectPosition(clientID, PositionControlHandle, -1, position, simx_opmode_oneshot);
positionmove[0] = position[0];
positionmove[1] = position[1] + 0.01* sin(count/10.0);
positionmove[2] = position[2];
//simxSetObjectPosition(clientID, PositionControlHandle, -1, positionmove, simx_opmode_oneshot);
printf("(%f,%f,%f)\r\n", position[0], position[1], position[2]);
}
simxFinish(clientID);
}
else {
printf("V-rep can't be connected.");
//extApi_sleepMs(300);
}
return 0;
}
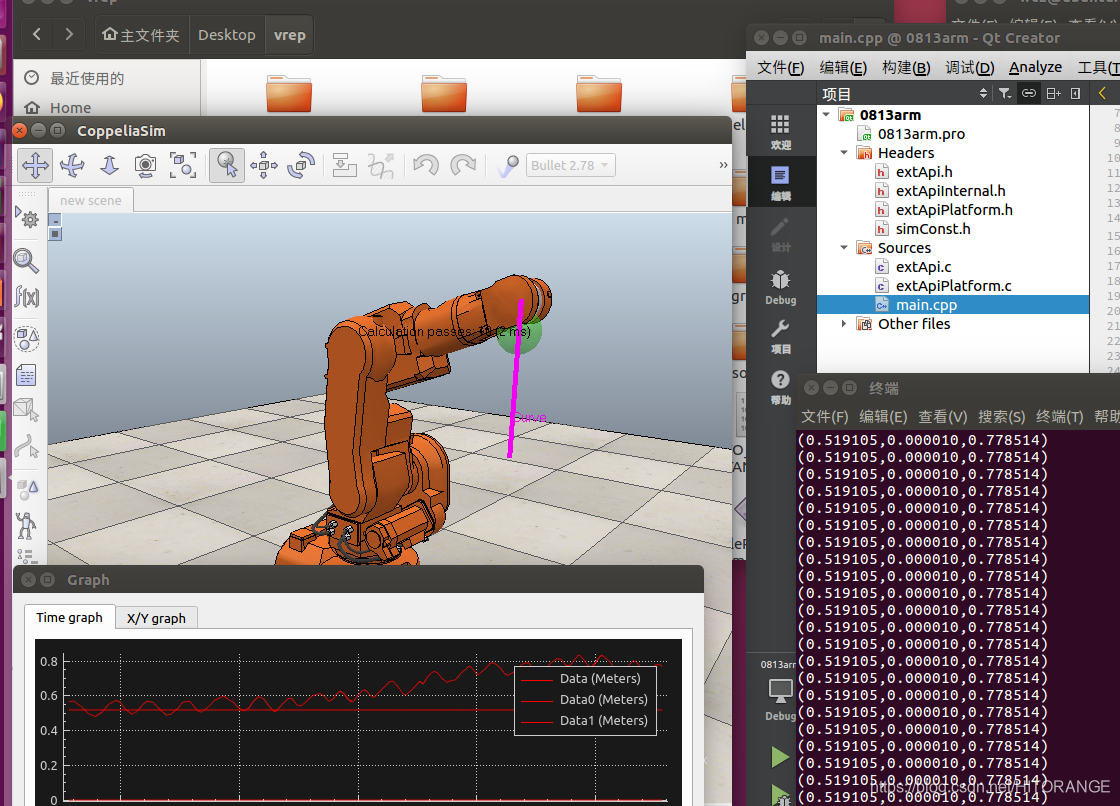
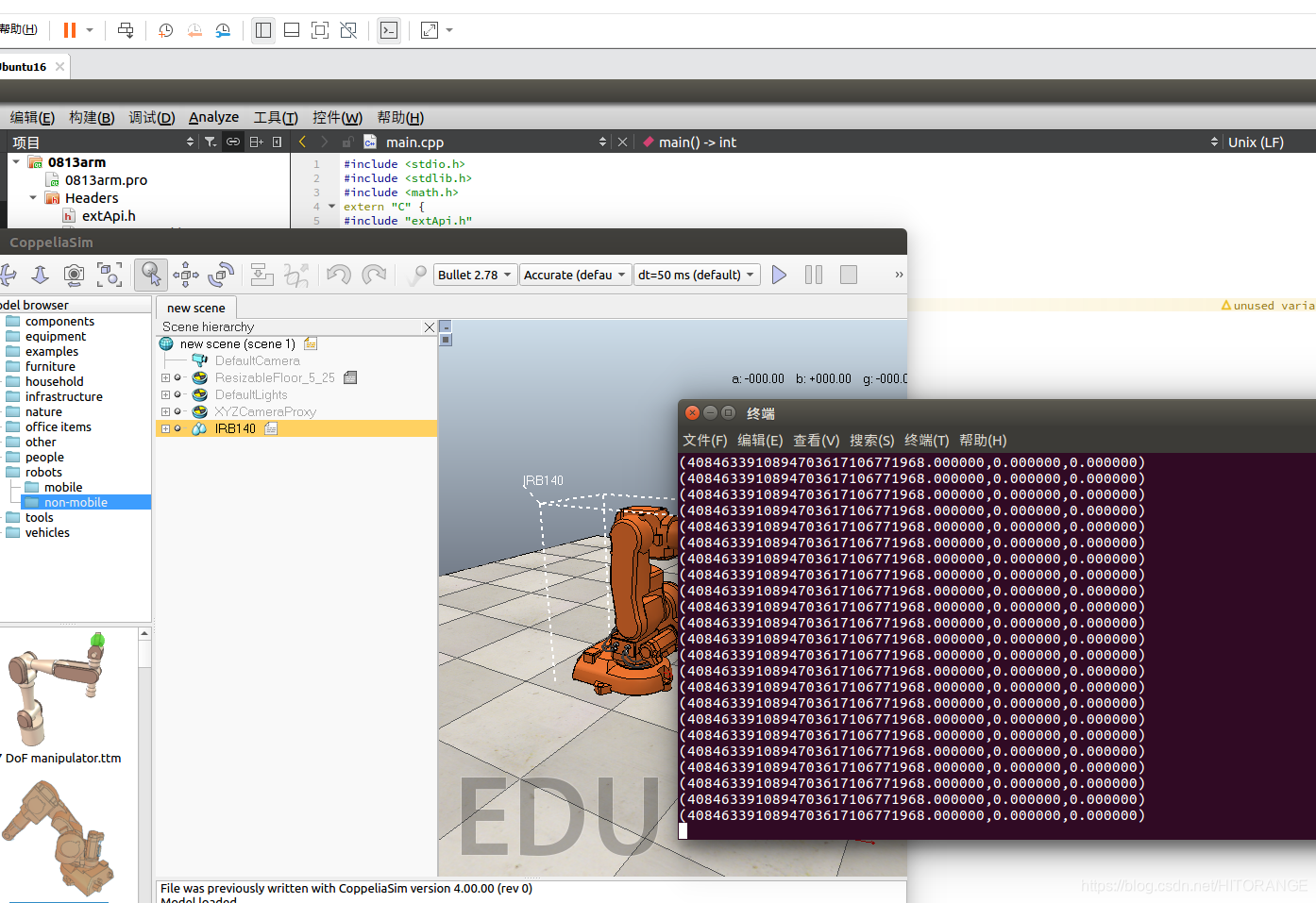
运行成功后在终端窗口不断打印数据
2. 从vrep中获取关节信息
取消c++主函数循环中相应的注释
while (simxGetConnectionId(clientID) != -1)
{
count++;
simxGetObjectHandle(clientID, "IRB140_manipulationSphere", &PositionControlHandle, simx_opmode_oneshot);
simxGetObjectPosition(clientID, PositionControlHandle, -1, position, simx_opmode_oneshot);
positionmove[0] = position[0];
positionmove[1] = position[1] + 0.01* sin(count/10.0);
positionmove[2] = position[2];
simxSetObjectPosition(clientID, PositionControlHandle, -1, positionmove, simx_opmode_oneshot);
printf("(%f,%f,%f)\r\n", position[0], position[1], position[2]);
}
vrep场景中拖入 IRB140机械臂
构建工程运行,vrep中的机械臂末端位置进行往复运动