typora-copy-images-to: upload
C++11 ���߳�
һ����������
1.����:һ����ͨ���л����������ж���̻߳����;����:һ��������һ�����̻��߳�,�����ͬʱ����
2.����:һ����ִ�г���
3.�߳�:����һ������һ�����߳�,���߳���Ψһ��,���������ڵ��ڽ���,���̲߳���,�߳�Ƶ�����л������ı����ڽ��̵�����ʱ��
4.һ������ִ����ϵı�־�����߳�ִ�����
�����߳����
1.�̵߳Ļ�������
join(),���̵߳ȴ����߳�ִ�����,����������̵߳���Դ��
detach(),�����̺߳���,ʹ��detach()���������߳��ں�̨����,��˵�����̲߳���ȴ����߳����н����Ž��������������߳�������ʱ��(����ϵͳ)�ӹ�,��������Դ,�൱��һ���ػ��߳�,���߳�detach��������join�����ˡ������ʱ���߳���ʹ�������߳������ݻ���������,������ϵͳû����Ϊ���ݰ�ȫ���Ե����ö�ʹ�ÿ�����ʽ�Ļ�,datach�����̻߳��ջᵼ����Դ�Ļ���,�Ӷ����´��ݸ����̵߳��������ݲ�����,��������
joinable(),����߳��Ƿ�ɱ�join��datach.���thread�����Ƿ��ʶһ���(active)�Ŀ������̡߳�ȱʡ�����thread�����Ѿ����join��thread�����Ѿ�detach��thread������joinable������true(����ʹ��datach��join),false(������ʹ��datach��join)��
#include <thread>
#include <iostream>
using namespace std;
void Func(const int &num){
cout << "���߳̿�ʼִ��" << endl;
cout << num << endl;
cout << "���߳�ִ�н���" << endl;
}
int main(){
int count = 10;
thread mythread(Func,count);//�����߳�
mythread.join();
//mythread.detach()
if(mythread.joinable()){
cout << "��û��datach��join" << endl;
}
else{
cout << "�Ѿ�datach��join" << endl;
}
cout << "���߳�ִ�����" << endl;
return 0;
}
join()����

detach()���н��,һ����������߳��������߳�ִ�н���,���߳̾ͻ������̷߳���,������߳���ִ�����,�����̶߳��ֲ�����,�������߳�ʹ�������߳��еĹ�����������������,�������߳̿���ʹ�õı���,�ͱ��δ����,�����쳣��Ԥ��Ĵ���

2.�̴߳���
get_id(),��ȡ�߳�ID,����һ������Ϊstd::thread::id�Ķ���
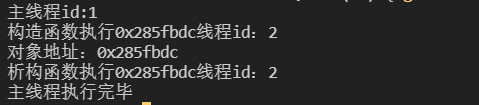
test1()�д������߳�ʱ,�����߳���ں���Func()�еĵڶ���������һ������,���Դ���ʱ���ᷢ����ʽת��,��ʹ��datach����֤���߳�ִ�н���ǰת���Ѿ����,�Ϳ��ܴ������߳��Ѿ�ִ����ɻ�����ջ����mySecond,�������߳����Ѿ����յ����ݹ��칹�����,����δ������Ϊ�������쳣��Ԥ��Ĵ������Ա���ʹ��join()��join()���н������:
���ǿ��Է��ֶ���Ĺ����������߳�����ɵġ�
test2(),�ڴ������߳���������ǰ������ʱ����,ȷ����ʱ����Ĺ��������߳������,����test1()�����⡣��˿���ʹ��detach(),datach()���н������:
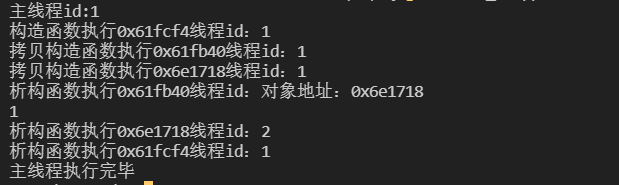
��ʱ���������߳�����ɹ���,����ϵͳΪ�˰�ȫ���Ե�����ʹ�ÿ�����
����:Ϊʲôʹ�������ο�������,�ڶ��ο������������߳���ִ��,�����������߳���
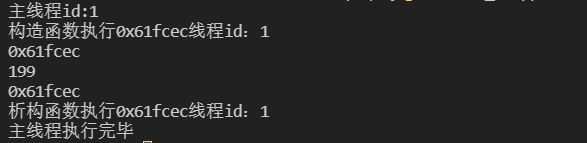
test3(),ͨ��ref���ݶ��������(ref���ð�װ����reference_wrapper������ԭ���ᱻʶ���ֵ����,��reference_wrapper����ʽת��Ϊ�����õ�ֵ����������),�Ӷ������߳��иı����߳��ж�������ݳ�Ա��ִ�н������:
test4(),ִ�н������:

test5(),ִ�н������:

test6(),ִ�н������:

#include <thread>
#include <iostream>
using namespace std;
class A
{
public:
int m_i;
A(int a) : m_i(a)
{
cout << "���캯��ִ��" << this << "�߳�id:" << std::this_thread::get_id() << endl;
}
A(const A &a) : m_i(a.m_i)
{
cout << "�������캯��ִ��" << this << "�߳�id:" << std::this_thread::get_id() << endl;
}
~A()
{
cout << "��������ִ��" << this << "�߳�id:" << std::this_thread::get_id() << endl;
}
void thread_work(int num)
{
cout << "thread_work ִ��,num = " << num << endl;
}
void operator()(int num)
{
cout << "�ɵ��ö���,num = " << num << endl;
}
};
//Ϊʲô��������һ��Ҫ��const����
//���ݵ���ʱ����������ֵ,��ֵֻ�ܱ� const ���͵�������ָ��,�����IJ��������һ���������,����Ϊconst����ʱ,��ֵ��Ϊ�����������Բ�����
void Func(const A &buf)
{
cout << "�����ַ:" << &buf << endl;
return;
}
void Func1(A &buf)
{
cout << &buf.m_i << endl;
buf.m_i = 199;
return;
}
void Func2(unique_ptr<int> ptr)
{
cout << "����ָ��ת�ƺ�ĵ�ַ" << &ptr << endl;
cout << *ptr << endl;
cout << "����ָ��ָ�����ݵĵ�ַ:" << &(*ptr) << endl;
}
//������ʱ����
void test1()
{
int mySecond = 12;
thread mythread(Func,mySecond);
//mythread.detach();
mythread.join();
}
void test2()
{
int mySecond = 12;
thread mythread(Func,A(mySecond)); //����ϵͳΪ�˰�ȫ���Ե�����ʹ�ÿ���
mythread.detach();
//mythread.join();
}
//���������
void test3()
{
int mySecond = 12;
A myObj(mySecond);
thread mythread(Func1, std::ref(myObj)); //ref���߲���ϵͳһ��Ҫʹ������,����ϵͳ�Ͳ���Ϊ�����ݰ�ȫ��������ʹ�ÿ�����
mythread.join();
cout << myObj.m_i << endl;
cout << &myObj.m_i << endl;
}
//��������ָ��
void test4()
{
unique_ptr<int> myPtr(new int(100));
cout << "����ָ��ĵ�ַ" << &myPtr << endl;
cout << *myPtr << endl;
cout << "ת��ǰ����ָ��ָ�����ݵĵ�ַ:" << &(*myPtr);
mythread.join(); //������join,Ҫ��Ȼ���߳̽���ptrָ����ڴ�ͱ�������,��������̻߳�û�н��յ����߳�ptr��move,��ʱ��ʹ���ѻ��յ��ڴ�
}
//�����Ա�������߳���ں���
void test5()
{
A myObj(10);
thread mythread(&A::thread_work, std::ref(myObj), 15);
mythread.join();
}
//�ɵ��ö������߳���ں���
void test6()
{
A myObj(10);
thread mythread(std::ref(myObj), 15);
mythread.join();
}
int main()
{
cout << "���߳�id:" << std::this_thread::get_id() << endl;
//test1();
//test2();
//test3();
//test4();
//test5();
test6();
cout << "���߳�ִ�����" << endl;
return 0;
//�̵߳���ں�����������ͨ����,lambda����ʽ,����ĺ�����Ա,�ɵ��ö���
3.������
-
������:mutex,һ�������,���Ա����lock,unlock���ٽ���Դ������������
-
lock��unlock����ɶ�ʹ��,һ��mutex����lock���ζ�ֻunlockһ��,Ҳ����lockһ�ζ�unlockһ��
-
Ϊ�˷�ֹ����unlock����std::lock_guard��ģ��,���ö�����������ڼ������ͷ���.,��ʱ���ܶ����������lock��unlock
-
��������Ҫ��2�������ϵĻ������Ż����,ԭ����ϵͳ��Դ�ľ����½��������ƽ�˳����,��֤��ͬ�̵߳�����˳��һ�¾Ͳ��ᷢ��������
-
std::lock,Ҫ��һ���Խ����������,ֻҪһ��û�������ɹ�,�������ͷ��Ѿ���������,�������߳�ʹ��,�ƻ������������뱣�������������߳�,�Ժ��ٳ��Խ����л���������,ʹ��lockҪ�ǵý�����
-
lock_guard�ĵڶ�������std::adapt_lock,ʹ���乹�캯�������û�������lock��Ա����,�������lockһ���������������ʹ��
#include <iostream>��
#include <thread>
#include <list>
#include <mutex>
using namespace std;
class A
{
public:
bool outMsg(int &recv)
{
lock(my_mutex1, my_mutex2);
// my_mutex1.lock();
// my_mutex2.lock();
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
my_mutex2.unlock();
my_mutex1.unlock();
return true;
}
my_mutex2.unlock();
my_mutex1.unlock();
return false;
}
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
//lock_guard<mutex>my_guard(my_mutex);//ȡ��lock,unlock��ֹ����unlock,���ö������������,��������ָ�롣adopt_lock,ֻ������������
lock(my_mutex1, my_mutex2);//ȷ���������ɹ�����
//lock�Ѿ�������������,����lock_guardʹ��adopt_lock�������Է�ֹ��ͬһ���������������
lock_guard<mutex> my_guard1(my_mutex1, adopt_lock);
lock_guard<mutex> my_guard2(my_mutex2, adopt_lock);
// my_mutex1.lock();
// my_mutex2.lock();
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
// my_mutex2.unlock();
// my_mutex1.unlock();
}
}
void outMsgqueue()
{
int command;
for (int i = 0; i < 1000; ++i)
{
bool flag = outMsg(command);
if (flag == true)
{
cout << "���յ�����:" << command << endl;
}
else
{
cout << "��Ϣ����Ϊ��" << endl;
}
}
}
private:
list<int> msgQueue;
mutex my_mutex1;
mutex my_mutex2;
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj); //�ڶ������������������Ա�֤�����߳���ڶ����Ա������ͬһ������,�����ǿ�����IJ�ͬ���������̴߳��������ݲ���ͬһ�������е�����,����Ҫ�û�������������,�Է�ֹһ���̶߳����ݽ���д����ʱ,��һ���߳̽��ж�����
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}
4.unique_lock
unique_lock �IJ���
- unique_lock �ܹ�ȡ��lock_guard
-
- std::adopt_lock,ʹ���乹�캯�������û�������lock��Ա����,���Ա�����ǰlock
unique_lock�Ĺ��ܺ�lock_guard����,ʹ�õڶ�������adopt_lock��ʾ�������Ѿ���lock,����ʹ��ǰ��Ҫ��ǰlock������
2)std::try_to_lock,����ʹ��mutex��lockȥ����,���������ʧ�ܲ����������̡߳�������߳���try_to_lock֮ǰ����,try_to_lock��һֱ����ʧ�ܡ�
unique_lock��.owns_lock�鿴try_to_lock�Ƿ��õ���,�õ�����true
3)std::defer_lock,ʹ�õ�ǰ���Dz����Լ���lock,����ʼ��һ��û�м�����mutex
- std::adopt_lock,ʹ���乹�캯�������û�������lock��Ա����,���Ա�����ǰlock
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#define defer_flag
using namespace std;
class A
{
public:
bool outMsg(int &recv)
{
lock(my_mutex1, my_mutex2);
// std::chrono::milliseconds drua(200); //1��==1000����
// std::this_thread::sleep_for(drua); //��Ϣһ����ʱ��
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
my_mutex2.unlock();
my_mutex1.unlock();
return true;
}
my_mutex1.unlock();
my_mutex2.unlock();
return false;
}
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
#ifdef defer_flag
//��ʾdefer_lock
std::unique_lock<mutex> sbguard1(my_mutex1, std::defer_lock);
std::unique_lock<mutex> sbguard2(my_mutex2, std::defer_lock);
sbguard1.lock();
sbguard2.lock();
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
#else
//��ʾadopt_lock
// lock(my_mutex1,my_mutex2);
// unique_lock<mutex>uniqueLock1(my_mutex1,adopt_lock);
// unique_lock<mutex>uniqueLock2(my_mutex2,adopt_lock);
// cout << "����һ������" << i << endl;
// msgQueue.push_back(i);
//��ʾtry_to_lock
// lock(my_mutex1,my_mutex2);
unique_lock<mutex> uniqueLock1(my_mutex1, try_to_lock);
unique_lock<mutex> uniqueLock2(my_mutex2, try_to_lock);
if (uniqueLock1.owns_lock() && uniqueLock2.owns_lock())
{
cout << "���������õ���" << endl;
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
}
else
{
cout << "����ʧ��,�ɵ�����" << endl;
}
//my_mutex1.unlock();
//my_mutex2.unlock();
#endif
}
}
void outMsgqueue()
{
int command;
for (int i = 0; i < 1000; ++i)
{
bool flag = outMsg(command);
if (flag == true)
{
cout << "���յ�����:" << command << endl;
}
else
{
cout << "��Ϣ����Ϊ��" << endl;
}
}
}
private:
list<int> msgQueue;
mutex my_mutex1;
mutex my_mutex2;
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj);
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}
unique_lock �ij�Ա����
- lock()����
- unlock()����,unique_lock�ܹ��Զ�����,��������Ҫ��;����һЩ�������ʱ������unlock������,unique_lock���Ѿ����������ٽ�����
- try_lock()���Լ���,���������߳�,�ɹ�����true
- release()�����,����ָ������ָ��
unique_lock����Ȩ�Ĵ���mutex
- std::unique_lockstd:mutex uniqueLock1 (my_mutex1): ����ȨȨ����uniqueLock1ӵ��my-mutex1������Ȩ
- uniqueLock1�����Լ���mutex (my-mutex1)������Ȩת�Ƹ�������unique-lock����
unique-lock�������mutex������Ȩ������ ����ת��,���Dz��ܸ��ơ�
����1:std::move
����2:return std::unique_lock ��ʱ����
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#define flag_release
using namespace std;
class A
{
public:
std::unique_lock<mutex> rtn_unique_lock()
{
std::unique_lock<mutex> temguard(my_mutex1);
return temguard;//�Ӻ�������һ���ֲ�����,ϵͳ����һ����ʱunique_lock���������ƶ����캯��
}
bool outMsg(int &recv)
{
lock(my_mutex1, my_mutex2);
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
my_mutex2.unlock();
my_mutex1.unlock();
return true;
}
my_mutex1.unlock();
my_mutex2.unlock();
return false;
}
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
#ifdef flag_release
//��ʾunique_lock ��lock��unlock
// unique_lock<mutex> uniqueLock1(my_mutex1, defer_lock);
// unique_lock<mutex> uniqueLock2(my_mutex2, defer_lock);
// uniqueLock1.lock();
// uniqueLock2.lock();
// cout << "����һ������" << i << endl;
// msgQueue.push_back(i);
// uniqueLock1.unlock();
// uniqueLock2.unlock();
//��ʾunique_lock ��try_lock
unique_lock<mutex> uniqueLock1(my_mutex1, defer_lock);
unique_lock<mutex> uniqueLock2(my_mutex2, defer_lock); //lock��,�������ڽ�������Զ�unlock,��;����unlock��������
if (uniqueLock1.try_lock() && uniqueLock2.try_lock())
{
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
}
else
{
cout << "û�õ���,�ɱ����" << endl;
}
#else
//��ʾunique_lock ��release
unique_lock<mutex> uniqueLock1(my_mutex1);
//unique_lock<mutex>sbguard = rtn_unique_lock();//ת�ƺ�����mutex1������Ȩ
unique_lock<mutex> uniqueLock2(my_mutex2);
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
unique_lock<mutex> uniqueLock3(std::move(uniqueLock2)); //��my_mutex2������Ȩͨ���ƶ�����ת�Ƶ�uniqueLock3
std::mutex *mut1 = uniqueLock1.release();//��uniqueLock1��my_mutex1���,���Ժ���Ҫ����my_mutex1��unlock
std::mutex *mut2 = uniqueLock3.release();
mut1->unlock();
mut2->unlock();
#endif
}
}
void outMsgqueue()
{
int command;
for (int i = 0; i < 1000; ++i)
{
bool flag = outMsg(command);
if (flag == true)
{
cout << "���յ�����:" << command << endl;
}
else
{
cout << "��Ϣ����Ϊ��" << endl;
}
}
}
private:
list<int> msgQueue;
mutex my_mutex1;
mutex my_mutex2;
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj);
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}
5.����ģʽ��call_once
- ���߳��д���������������Ҫ����,�Է�ֹ�����߳��ڵ�ǰ�̻߳�û�����ɹ�ǰ�л��߳�ȥ����,�����л��ٴδ�����
- ˫�������ı�̷�ʽͨ�����ⵥ�������ɹ��������߳��ٴδ���ʱƵ���ļ�������,�Ӷ��������
- call_once ͨ�����std::once_flagȷ������ֻ������һ��
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#define flag_callOnce
using namespace std;
mutex resource_mutex;
std::once_flag g_flag;
class MyCas{
#ifdefflag_callOnce
static void Createinstance(){
m_instance = new MyCas();
cout << "Createinstance()ִ����" << endl;
static huishou hs;
}
public:
static MyCas * GetInstance(){
std::call_once(g_flag,Createinstance);//����һ��������,ͬһʱ��ֻ��һ���߳��ܹ�ִ��,�����̻߳�����
return m_instance;
}
#else
static MyCas * GetInstance(){
//if(m_instance != nullptr)��������,��m_instance �϶��Ѿ���new��
//if(m_instance == nullptr)������������m_instanceһ��û��new��,�߳�1new֮ǰ�л����߳�2new�����
if(m_instance == nullptr){//˫������
std::unique_lock<mutex>mymutex(resource_mutex);
if(m_instance == nullptr){
m_instance = new MyCas();
static huishou hs;//��̬����,�������˳�ʱһ�����������������
}
}
return m_instance;
}
#endif
void func(){
cout << "���Ժ���" <<endl;
}
class huishou{
public:
~huishou(){
if(MyCas::m_instance){
cout << "huishou��������ִ��" << endl;
delete MyCas::m_instance;
MyCas::m_instance == nullptr;
}
}
};
private:
MyCas(){
cout << "MyCas���캯��" << endl;
}//���캯��˽�л�
static MyCas *m_instance;
};
MyCas *MyCas::m_instance = nullptr;
void myThread(){
cout << "�߳̿�ʼִ��" << endl;
MyCas * p_a = MyCas::GetInstance();
cout << "�߳�ִ�н���" << endl;
return;
}
int main()
{
//��������߳��д����õ�������,���������߳��д���
thread mythread1(myThread);
thread mythread2(myThread);
return 0;
}
6.��������
-
std::condition_variable ��wait��Ա��������
wait ()�����ȴ����������ij���,wait�ĵڶ���������������
����ڶ�������lambda����ʽ����ֵ��true,��wait()ֱ�ӷ���;
����ڶ�������lambda����ʽ����ֵ��false,��ôwait()������������,������������,
�Ƕ�����ʲôʱ��Ϊֹ��?����������ij���̵߳���notify_one()��Ա����Ϊֹ;
���wait ()û�еڶ�������: my_cond. wait(guard) :��ô���ڶ�������1ambda����ʽ����falseЧ��һ��(Ĭ������Ϊfalse)
wait()������������,������������,����������ij���̵߳���notify_one()��Ա����Ϊֹ;
�������߳���notify one ()����wait (ԭ����˯��/����)��״̬���Ѻ�, wait�Ϳ�ʼ����,�ָ���wait��ʲô?
a) wait()���ϵij������»�ȡ��������,�����ȡ����,��ô���̾Ϳ���wait������Ż�ȡ,�����ȡ������,��wait�ͼ���������
b)
b.1)���wait�еڶ�������(lambda) ,���ж����lambda����ʽ,���lambda����ʽΪfalse,��ôwait�ֶԻ���������,��������״̬(�ܹ���ֹ��ٻ���,�����̻߳�����ij���̱߳����ѵ�������ʵ��δ����)
b.2)���lambda����ʽΪtrue, ��wait����,����������(��ʱ������������)��
b.3)���waitû�еڶ�������, ��wait����,������������(����������,��ͬ�ڿ�ʼ������) -
ע������
conditon_variableһ��Ҫ��notify_one(����һ��)/notify_all(��������,���ǻ��Ѻ���ڻ�����������)����,Ҫ��Ȼ���������㽫����������
wait���������Ὰ������Դ,���Ի��ܵ�����ϵͳ�ĵ���ʱ��Ӱ��
���notify_one()ʱ,����һ���̲߳�û�б�wait����,��ônotify_oneû��Ч
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <condition_variable>
using namespace std;
class A
{
public:
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
std::unique_lock<mutex> guard(my_mutex1);
cout << "����һ������" << i << endl;
msgQueue.push_back(i);
my_cond.notify_one();
}
}
void outMsgqueue()
{
int command;
while(true){
std::unique_lock<mutex> guard(my_mutex1);
my_cond.wait(guard,[this]{
if (!msgQueue.empty()){
return true;
}
return false;
});
command = msgQueue.front();
msgQueue.pop_front();
guard.unlock();
cout << "ȡ��һ��Ԫ��:" << command << endl;
}
}
private:
list<int> msgQueue;
mutex my_mutex1;
std::condition_variable my_cond;
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj);
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}
7.async��packaged_task��promise
std::async��һ������ģ��,��������һ���첽����,���������һ��std::future����
�첽��������Զ��Ĵ���һ���̲߳���ʼִ�ж�Ӧ�̵߳���ں���
std::future�����к����߳���ں����������صĽ��,�������߳�ִ�н������ؿ�����Ҫһ��ʱ��
������ǿ���ͨ��future����ij�Ա����get()�����ȴ��߳̽���,��ȡ����ֵ(get���ƶ�����,ֻ��getһ��)
std::async��һ������
std::launch::deferred,��ʾ�߳���ں������ûᱻ�ӳٵ�std::future��wait()����get()����ʱ��ִ��,���û��wait()����get(),�߳���ں�����������ִ�С�
std::launch::deferredʵ���ϲ�û�д������߳�,���������߳��е����߳���ں���
std::launch::async����һ�����̲߳�����ִ��
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
class A{
public:
int mythread(int num){
cout << num << endl;
cout << "thread start,thread_id= " << std::this_thread::get_id() << endl;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
cout << "thread end,thread_id= " << std::this_thread::get_id() << endl;
return 8;
}
};
int main(){
A a;
int temp = 12;
cout << "main thread = " << std::this_thread::get_id() << endl;
std::future<int>result = std::async(std::launch::deferred,&A::mythread,&a,temp);
cout << "continue..........!" << endl;
cout << result.get() << endl;//�����ȴ�mythread����,�õ�����ֵ,ֻ�ܵ���һ��
//result.wait();//�ȴ��̷߳���,�����������ؽ��
}
std::packaged_task :�������,�������װ����,�Ǹ���ģ��,����ģ������Ǹ��ֿɵ��ö���;ͨ��std::packaged_task���Ѹ��ֿɵ������װ����,���㽫����Ϊ�߳���ں���
std::packaged task��װ���Ҳ����ֱ�ӵ���һ����������,Ҳ�ܷ����������Ժ���á�
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
// int mythread(int num)
// {
// cout << num << endl;
// cout << "thread start,thread_id= " << std::this_thread::get_id() << endl;
// std::chrono::milliseconds dura(5000);
// std::this_thread::sleep_for(dura);
// cout << "thread end,thread_id= " << std::this_thread::get_id() << endl;
// return 8;
// }
int main()
{
int temp = 12;
cout << "main thread = " << std::this_thread::get_id() << endl;
//std::packaged_task<int(int)>mypt(mythread);//������mythreadͨ��packaged_task��װ����
std::packaged_task<int(int)> mypt([](int num)
{
cout << num << endl;
cout << "thread start,thread_id= " << std::this_thread::get_id() << endl;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
cout << "thread end,thread_id= " << std::this_thread::get_id() << endl;
return 8;
}); //������lambda����ʽͨ��packaged_task��װ����,������ֱ�Ӱ�װһ������Ч��һ��
std::thread pt1(std::ref(mypt), temp); //�߳�ִ��
pt1.join();
std::future<int> result = mypt.get_future(); //std::future�����а����߳���ں����ķ���ֵ,get_future����һ��future����
cout << result.get() << endl;
}
std::promise,��һ����ģ�����ǿ������߳��и��丳ֵ,�������߳���ȡ��ֵʹ��,����ʵ���߳�֮������ݴ���
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
void mythread(std::promise<int>&temp,int calc){
calc *= 10;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
int result = calc;
temp.set_value(result);//������浽temp������
return;
}
void mythread2(std::future <int>&temp){
auto result = temp.get();
cout << "mythread2 result:" << result << endl;
return;
}
int main(){
std::promise<int>mypro;//����һ��promise����,����ֵ������Ϊint
std::thread t1(mythread,std::ref(mypro),180);
t1.join();
std::future<int>ful = mypro.get_future();//promise��future��,���ڻ�ȡ���̷߳���ֵ
//auto result =ful.get();
//cout << "result = " << result << endl;
std::thread t2(mythread2,std::ref(ful));
t2.join();
}
8.future�ij�Ա����
-
get,��ȡ����ֵ,ת������
-
wait_for,�ȴ�һ��ʱ��,std::launch::deferred�ӳ�ִ��ʱ����Ч
-
future_statusö������,wait_for��״̬,timeout��ready��deferred
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
int mythread(){
cout << "thread start,thread_id= " << std::this_thread::get_id() << endl;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
cout << "thread end,thread_id= " << std::this_thread::get_id() << endl;
return 8;
};
int main(){
cout << "main thread = " << std::this_thread::get_id() << endl;
//std::future<int> result = std::async(mythread);//�������߳�����ִ��
std::future<int> result = std::async(std::launch::deferred,mythread);//�ӳ�ִ��,�������߳�ִ����ں���
cout << "continue..........!" << endl;
//ö������
//std::future_status status = result.wait_for(std::chrono::seconds(1));//timeout
std::future_status status = result.wait_for(std::chrono::seconds(6));//ready
if(status == std::future_status::timeout){
//��ʱ:��ʾ�̻߳�û��ִ����,�ҵ���1��,��ִ����Ҫ5��
cout << "�̳߳�ʱ" <<endl;
}
else if(status == std::future_status::ready){
//��ʾ�߳�ִ�����,�ҵ���6��,��ִ����Ҫ5��
cout << "�߳�ִ�����" << endl;
cout << result.get() << endl;
}
else if(status == std::future_status::deferred){
//��async�ĵ�һ������������Ϊstd::launch:deferred,����������
cout << "�̱߳��ӳ�ִ��" << endl;
cout << result.get() << endl;//����getʱ��ִ��,���Ҳ�û�д������̶߳���ʹ�����̵߳�����ں���
}
cout << "���߳�ִ�н���" << endl;
return 0;
}
- future��get���ƶ�����,����ֻ��getһ��,��share_future�ǿ���,���Կ���get���,������̶߳���Ҫ��ȡpackaged_task���ֵʱ������share_future
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
int mythread(int mypar){
cout << "mythread() start ,threadid = " << std::this_thread::get_id() << endl;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
return 8;
}
void mythread2(std::shared_future <int>&temp){
cout << "mythread() start ,threadid = " << std::this_thread::get_id() << endl;
auto result = temp.get();//��ȡֵ,ֻ��getһ��,��Ϊget���future��һ���ƶ�����,��temp��ֵ�ƶ���result,���Ըij�shared_future
cout << "mythread2 result:" << result << endl;
return;
}
int main(){
std::packaged_task<int(int)>mypt(mythread);
std::thread t1(std::ref(mypt),10);
t1.join();
std::future<int>result = mypt.get_future();
std::shared_future<int> result_move(std::move(result));//future ת�� �� shared_future
//std::shared_future<int> result_move(result.share());ͬ��һ��һ����result�Ľ���ƶ���result_move
//bool ifcanget = result.valid();�ж�result�����Dz���һ����Чֵ
auto mythread_result_copy = result_move.get();//����get���,�����Ǹ���
//std::thread t2(mythread2,std::ref(result));
std::thread t2(mythread2,std::ref(result_move));
t2.join();
cout << "���߳̽���" << endl;
return 0;
}
//std::future ,get ת������
//std::shared_future Ҳ��һ����ģ��,get ��������
9.atomicԭ�Ӳ���
- ԭ�Ӳ���,һ�����ɷָ�IJ���,Ҳ����ִ��ԭ�Ӳ���ʱ����ϵͳ�����л��߳�
std::atomic������ԭ�Ӳ���,std::atomic��һ����ģ��,������װij�����͵�ֵ
std::atomicԭ�Ӳ���֧��++���C��+=��-=����,�����Ŀ��ܲ�֧��,���ĵ� - �뻥�������������ڻ�����������סһ�δ���,��atomicֻ�����һ������
- load,��ԭ�Ӳ����ķ�ʽ����,store��ԭ�Ӳ����ķ�ʽ��д��
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
std::atomic<int> mycount;
void mythread(){
for(int i =0;i<1000000 ;i++){
mycount++;
//mycount = mycount + 1;��֧��
}
return;
}
int main(){
thread mythread1(mythread);
thread mythread2(mythread);
mythread1.join();
mythread2.join();
cout << "�����߳�ִ�����,mycount = " << mycount << endl;
//std::atomic<int> mycount = 0;�˶����std::atomic<int>::atomic(const std::atomic<int>&) = delete ,�������캯��delete
//std::atomic<int>temp = mycount;//error
std::atomic<int>mycountCopy(mycount.load());
cout << mycountCopy << endl;
mycountCopy.store(99);
cout << mycountCopy << endl;
return 0;
}
10.async
-
std::thread()���ϵͳ��Դ����,�߳̿��ܴ���ʧ�ܵ��³������
-
std::async()�IJ���
- std::launch::deferred,���������߳�,�ӳٵ����߳���ں���ֱ��future�����get()��wait()��Ա��������
- std::launch::async,ǿ���첽���������߳���ִ��,���봴�����߳�
- std::launch::deferred | std::launch::async ϵͳ����ʵ�����ѡ��(ϵͳ��Դ�ĵĽ��ų̶�),��std::async������һ������ʱ�����������,�������Dz�����ȷ���Ƿ��������߳�
-
std::thread �� std::async������
std::thread һ����ȥ�����߳�,����ʧ���������ܱ���
std::async ��һ���ᴴ�����߳�,��ϵͳ��Դ����ʱ,����ϵͳ��ѡ�������߳�,��ʹ�õ���future����get()��wait()���߳�ִ���߳���ں���std::asyncͨ��future��ȡ�̷߳���ֵ������
-
std::async ��ȷ���������̵߳�����Ľ��
ʹ��future�����wait_for ���鿴status
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <future>
using namespace std;
int mythread(){
cout << "thread start,thread_id= " << std::this_thread::get_id() << endl;
std::chrono::milliseconds dura(5000);
std::this_thread::sleep_for(dura);
cout << "thread end,thread_id= " << std::this_thread::get_id() << endl;
return 8;
};
int main(){
cout << "main thread = " << std::this_thread::get_id() << endl;
std::future<int> result = std::async(mythread);
cout << "continue..........!" << endl;
//ö������
std::future_status status = result.wait_for(0s);//ͨ������Ĵ������ж�ϵͳ������ʲô����
if(status == std::future_status::deferred){
//�̱߳��ӳ�ִ��,��������Ϊϵͳ��Դ����,ϵͳѡ����std::launch::deferred����
cout << result.get() <<endl;//������õ�mythread
}
else{
if(status == std::future_status::ready){
//��ʾ�߳�ִ����
cout << "�߳�ִ����" << endl;
cout << result.get() << endl;
}
else if(status == std::future_status::timeout){
cout << "��ʱ�̻߳�ûִ����" << endl;
cout << result.get() << endl;
}
}
cout << "���߳�ִ�н���" << endl;
return 0;
}
11.Windows�ٽ���
- CRITICAL_SECTION�ٽ�������
- InitializeCriticalSection��ʼ���ٽ���
- EnterCriticalSection�����ٽ���
- LeaveCriticalSection���ٽ���
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <Windows.h>
using namespace std;
#define __WINDOWS_
//���������Զ��ͷ�windows�µ��ٽ���,��ֹ����LeaveCriticalSection������������ķ���,������c++11�е�std::lock_guard<std::mutex>����
class CWinLock //��RAII��(Resource Acquisition is initialization)���ġ���Դ��ȡ����ʼ����;
//����,����ָ��������,������RAII��;
{
public:
CWinLock(CRITICAL_SECTION *pCritmp) //���캯��
{
m_pCritical = pCritmp;
EnterCriticalSection(m_pCritical);//�����ٽ���
}
~CWinLock() //��������
{
LeaveCriticalSection(m_pCritical);//���ٽ���
}
private:
CRITICAL_SECTION *m_pCritical;
};
class A
{
public:
A(){
#ifdef __WINDOWS_
InitializeCriticalSection(&my_winsec);//ʹ���ٽ���֮ǰ��Ҫ��ʼ��
#endif
}
bool outMsg(int &recv)
{
#ifdef __WINDOWS_
EnterCriticalSection(&my_winsec);//�����ٽ���
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
LeaveCriticalSection(&my_winsec);//���ٽ���
return true;
}
LeaveCriticalSection(&my_winsec);//���ٽ���
#else
my_mutex1.lock();
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
my_mutex1.unlock();
return true;
}
my_mutex1.unlock();
#endif
return false;
}
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
cout << "����һ������" << i << endl;
#ifdef __WINDOWS_
CWinLock wlock(&my_winsec); //window�汾��lock_guard
msgQueue.push_back(i);
#else
my_mutex1.lock();
msgQueue.push_back(i);
my_mutex1.unlock();
#endif
}
}
void outMsgqueue()
{
int command;
for (int i = 0; i < 1000; ++i)
{
bool flag = outMsg(command);//����,��������,�����������иı�,��������ӡ���ı���ֵ
if (flag == true)
{
cout << "���յ�����:" << command << endl;
}
else
{
cout << "��Ϣ����Ϊ��" << endl;
}
}
}
private:
list<int> msgQueue;
mutex my_mutex1;
#ifdef __WINDOWS_
CRITICAL_SECTION my_winsec;//windows�е��ٽ���,������C++11�е�mutex
#endif
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj);
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}
12.����������
-
recursive_mutex�ݹ�Ķ�ռ������,����linux�е�Ƕ����
std::mutex: ��ռ������,�Լ�lockʱ����lock����
std::recursive_mutex:�ݹ�Ķ�ռ������:����ͬһ���߳�,ͬһ����������α�.lock(),Ч���ϱ�mutexҪ��һЩ;recursive_mutexҲ��lock,Ҳ��unlock();
-
����ʱ�Ļ�����std::timed_mutex��std::recursive_timed_mutex
-
std::timed_mutex:�Ǵ���ʱ���ܵĶ�ռ������;
try_lock_for() :������һ��ʱ��,�ǵȴ�һ��ʱ�䡣������õ�����,���ߵȴ�����ʱ��û�õ���,�������ִ��,��������;
try_lock_until() :������һ��δ����ʱ���,�����δ����ʱ��û����ʱ����,����õ�����,��ô��������;���ʱ�䵽��,û�õ���,�������ִ��,��������;
-
std::recursive_timed_mutex:����ʱ���ܵĵݹ��ռ������(����ͬһ���̶߳�λ�ȡ���������)
-
#include <iostream>
#include <thread>
#include <list>
#include <mutex>
#include <Windows.h>
using namespace std;
class A
{
public:
bool outMsg(int &recv)
{
std::lock_guard<std::timed_mutex> sbguard(my_mutex1);
if (!msgQueue.empty())
{
recv = msgQueue.front();
msgQueue.pop_front();
return true;
}
my_mutex1.unlock();
return false;
}
void inMsgqueue()
{
for (int i = 0; i < 1000; ++i)
{
cout << "����һ������" << i << endl;
std::chrono::milliseconds timeout(100); //100����
//if (my_mutex.try_lock_for(timeout)) //�ȴ�100���������� ��ȡ��
if (my_mutex1.try_lock_until(chrono::steady_clock::now() + timeout))
{
//����100����֮���õ�����
msgQueue.push_back(i);//����������־������յ�������,��ֱ��Ū����Ϣ��������
my_mutex1.unlock(); //������Ҫ����;
}
else
{
//���û�õ���ͷ
std::chrono::microseconds sleeptime(100);
std::this_thread::sleep_for(sleeptime);
}
}
}
void outMsgqueue()
{
int command;
for (int i = 0; i < 1000; ++i)
{
bool flag = outMsg(command);//����,��������,�����������иı�,��������ӡ���ı���ֵ
if (flag == true)
{
cout << "���յ�����:" << command << endl;
}
else
{
cout << "��Ϣ����Ϊ��" << endl;
}
}
}
private:
list<int> msgQueue;
std::timed_mutex my_mutex1;
};
int main()
{
A myobj;
thread outThread(&A::outMsgqueue, &myobj);
thread inThread(&A::inMsgqueue, &myobj);
outThread.join();
inThread.join();
cout << "���߳̽���" << endl;
return 0;
}