Ŀ¼
1.��̬�Ķ���������
ͬһ�����������ڲ�ͬ����,�����в�ͬ�Ľ���,������ͬ��Ч����
�����ϵĶ�̬
��̬��Ϊ��̬��̬(����ʱ��̬����̬���ࡢ���)����̬��̬(����ʱ��̬����̬���ࡢ����)
��̬��̬�������ͱ�̡��������ص�,����������ݶ�����ö����������,�ڱ���ξ�ȷ�������ĵ��õ�ַ��
��̬��̬ͨ��ָ������ñ�ʾ��������麯��ʵ��,�����нβ�ȷ�������Ǹ�������
�����ϵĶ�̬
��̬��̬
C++����֧�ֶ�̬�Եĸ�������:ָ������õľ�̬���ͺͶ�̬���͵IJ�ͬ�� ����C++PRIMER��
��̬������
- �����Ŀ�еĽ��������,�ṩ����Ŀ���չ�ԡ�
- Ӧ�ó���Ϊÿһ������Ĺ��ܵ��ñ�д����,ֻ��Ҫ�Գ���ĸ��ദ����
2.��̬�����붯̬����
��̬����
����ʽ�ľ�̬�����ڱ���ʱ������֪��,�DZ������ͻ����ʽ�������͡�
��̬����
�DZ��������ʽ��ʾ���ڴ��еĶ��������,ֱ������ʱ�ſ�֪��
���ߵĹ�ϵ
�����ָ������õľ�̬���Ϳ����붯̬���Ͳ�һ��,������ʽ�Ȳ���ָ��Ҳ��������,��̬���ͺͶ�̬������Զһ�¡�
3. ��̬��̬(����ʱ��̬����̬���ࡢ����)
���ҽ���ͨ��ָ������õ����麯��ʱ�Ż�������ʱ�����õ���,��Ϊֻ����������¶���Ķ�̬���ͺ;�̬���ͲŻͬ��
����1
#include<iostream>
using namespace std;
class Maker {
public:
virtual void speak() {
cout << "Maker" << endl;
}
};
class sonOfMaker :public Maker {
public:
void speak() {
cout << "sonOfMaker" << endl;
}
};
void dynamicbinding(Maker *bd) { //upcasting
bd->speak();
}
int main()
{
sonOfMaker *sm = new sonOfMaker;
dynamicbinding(sm);
delete(sm);
return EXIT_SUCCESS;
}
��ʱ���sonOfMaker;��ȥ��virtual�����Maker��
����1
�����������ͨ����ָ�����virtual����ʵ���˶�̬����,����ʱȷ�����õĶ�����sonOfMaker���͵�,
�����������sonOfMaker;
��ȥ��virtual֮��,���麯���ĵ��ö��DZ���ʱȷ����,����ʱdynamicbinding(Maker *bd)���ö�����Maker���͵�ָ��,
��������������Maker��
����2
#include <iostream>
using namespace std;
class shape{
public:
void virtual draw(){cout<<"I am shape"<<endl;}//�����趨��draw���麯��
void fun(){draw();}
};
class circle:public shape{
public:
void draw(){cout<<"I am circle"<<endl;}//��Ȼû��˵��circle���е�draw���麯��,����circle��ʵ�̳���virtual����
};
void main(){
circle oneshape;
oneshape.fun();
}
��������������������������������
��Ȩ����:����ΪCSDN������Miibotree����ԭ������,��ѭCC 4.0 BY-SA��ȨЭ��,ת���븽��ԭ�ij������Ӽ���������
ԭ������:https://blog.csdn.net/gaoxin1076/article/details/8298279
����������������I am circle;��ȥ��virtual �������I am shape(��������,�������java�л����I am circle)��
����2
��������ǴӲ�����Miibotree������ת������,������Ϊ������virtualʱ���Ƕ�̬����,������Ϊ�Ⲣ���Ƕ�̬����,����Ȼ�Ǿ�̬���ࡣ
ȥ��virtual��ʱ��
�����Ľ�������:
����û����������ݽṹ������draw�ĵ�ַ,���Գ�����֪����,��Ȼֻ����shape���е�draw��ַ��,������һ����תָ�
�������ɲ����Ľ���,��������ַ��ӡ����:
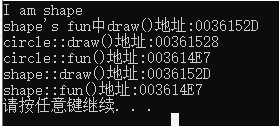
����̳й�����circle::fun()��ȫ���Ǹ����shape::fun(),��������ַ��һ��
���ڻ���shape��fun��,�������Ҳ��������draw()�ĵ�ַ,��Ϊ�����draw��Ȼ�Ƕ����ڻ���shape֮���,��ʹ��������ڻ���֮ǰ������
��virtual��ʱ��
��˵����,�������������virtualʵ����fun���õ�������circle::draw()
������Ȼ�Ǿ�̬����,���Ƕ�̬���ࡣ
��Ϊ������ֱ���ö���ȥ����fun()��������draw()
������:
From ��C++PRIMER��:��ͨ��������еĺ���(�麯������麯��)����������ʱȷ�������������ȷ������,������ζ������������Ķ�̬�����뾲̬���Ͳ�һ�¡���
From ��C++PRIMER�� �����ҽ�����ͨ��ָ������õ����麯��ʱ,�Ż�������ʱ�����õ���,Ҳֻ����������¶���Ķ�̬���Ͳ��п��ܺ;�̬���Ͳ�ͬ����
����֮���Կ���ͨ����̬����ʵ��������Ķ�����õ��������draw()����Ϊ����oneshape��ʱ���Ѿ�ȷ��˵����������circle�Ķ���,һ��Ҳ������,���Ա�����ֱ�ӵ��õľ����������draw��
�����Ҫ������2��д����̬�ķ�ʽ:
����3
#include <iostream>
using namespace std;
class shape {
public:
void virtual draw() { cout << "I am shape" << endl; }//�����趨��draw���麯��
void fun() { draw(); }
};
class circle :public shape {
public:
void draw() { cout << "I am circle" << endl; }//��Ȼû��˵��circle���е�draw���麯��,����circle��ʵ�̳���virtual����
};
void main() {
circle a;
shape * b = &a;
shape & c = a;
//�����������Ƕ�̬����
b->draw(); //��� I am circle
c.draw();//��� I am circle
}
����3
�������b�ǻ������͵�ָ��,ȥ����draw()����ʱ,����������bָ��ָ����ڴ�ռ������麯����ָ���ҵ���Ӧ��draw()������
���仰˵,b�ľ�̬�����ǻ���shape,������ָ����ڴ�ռ��е��麯������circle���,����b�Ķ�̬������������circle,����b���õľ���circle::draw()��
�ɴ�b����˶�̬���ࡣ
����cҲ��ͬ���ĵ�����
����1������3��������������ת��(upcasting)
-
��ͬ��:������ָ���������ʵ���˶�̬��
-
��ͬ��:����1�м����һ��
dynamicbinding�������,����ʵ������������ת��(upcasting)���������������ת����ϻ����е��麯��,ʹ�øó����ɿ���չ��,��������Ҫ��չ�µĹ���ʱ�����������ӻ�����������Լ��������������,����ʱ������ͨ��
dynamicbinding������������á�
FROM ��C++���˼�롷:��һ����Ʒ�����õ�OOP������,������������еĺ���������tune()ģ�͡�����:tune()��������1�е�dynamicbinding()��,ֻ�����ӿ�ͬ��,�����ij����ǿ���չ�ġ���Ϊ����ͨ���ӹ�������̳����������Ͷ������¹��ܡ���������ӿڵĺ�����ȫ����Ҫ�ı�Ϳ����ʺ�����Щ���ࡣ
4.�麯��
�麯����ԭ���C�麯����
���һ�������麯��,��ô�����Ķ������һ���麯����ָ��
���д���麯������ڵ�ַ��������̳�����麯����
����������д/����/���˻���Ļ�����,�������ͻ���麯�����еĺ�����ڵ�ַ��Ϊ�������ж�Ӧ���麯����ڵ�ַ��
������2��3��,����Developer Command Prompt���Կ����麯������
��virtual��ʱ��,shape���麯��������:
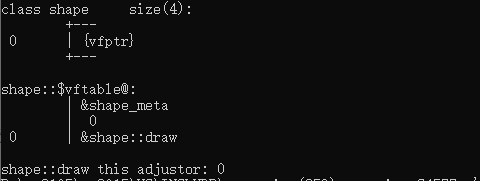
vfptr����һ���麯����ָ�� ,����vftable�����麯����
����0 | &shape::draw ��ʾ��һ���麯��Ϊshape::draw��
������circle���麯����:
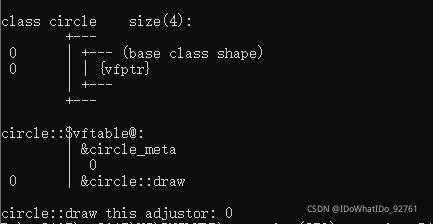
����circle���ȼ̳��˻�����麯���������Լ����麯����,�������ġ��C
Ȼ��ͬ���ӻ���̳е��麯����ָ��ָ���Լ����麯����
������������������circle��д�˸�����麯��,������д�ĺ����ͻḲ�ǵ��麯������Ӧ�ĸ���ĺ�����
�����麯���Ĺ涨
- �κι��캯��֮��ķǾ�̬�������������麯��
- virtualֻ�ܳ��������ڵĺ�������,���ܳ���������ĺ�������
- �����麯���������ɶ���,��Ϊ������˶�̬��,ֻ��������ʱ��֪��������ĸ��麯�����������ʱ���õ���һ��û�б�������д���麯��,��ô��������ȥ�Զ����ü̳в��������Ķ��塣
- ��������һ�������������麯����ú���������������ʽ��ҲΪ�麯��
(�������е��麯��������ʽ��д��virtual��Ӱ��,��û��Ҫ,�������Ķ���)
5.ע�����֡�virtual���ǻ��ຯ�����롾���������ػ���ͬ��������
- virtualֻ�в����ͺ���������ͬ�ſ��Ը���(������ʽ�ؼ���override��ֹ����д��)�������߲��ܲ����Ƿ���ͬ,ֻҪ�������к������������ͬ,��ô�����ػ�������ʹ�ø����غ���,�������������غ�����
- virtual����֮����Զ�̬����������,�������ػ���ͬ������֮��,��Ȼ��Ȼ����ͨ�����������������ñ����صĻ��ຯ��,�����û����ߡ�
6.����(�ض���)�����ǡ�����
���صĹ���
- ������ĺ�������ຯ��ͬ��,��������ͬ,��������virtual,����ͬ��������������-----����������,���ط�����ͬ���С�
- ������ĺ����ͻ��ຯ��ͬ��,������ͬ,��û��virtual,��ʱ����ͬ������������-----�����ڸ���,������virtual��
���ǵ�����
- �ֱ�λ��������ͻ���
- ��������ͬ
- ������ͬ
- ���ຯ����virtual
���ص�����
- ͬһ����
- ��������ͬ
- ������ͬ
- virtual�����