C++���߳�֮��,�̺߳�������֮��,�̼߳������������ͻ��Ѳ���
һ��ԭ������
1. �߳�������ϵ
Ŀ������,Ϊ�˼ӿ��ٶ�,������Ҫ���̡߳������߳�֮����������ϵ��Ȼ��ʵʱ����ÿ���̵߳����������С�������Ҫ�����Ľ�����,���̺߳�����,�߳�֮����������ϵ,��������Ҳ��������
�߳�ABCD��A��ɺ�֪ͨB,B���ҵ���,֪ͨC,C��ɺ�,֪ͨD,D��ɺ�,֪ͨA�����ѭ����ȥ��A��>B��>C��>D��>A��
�������������ĸ��̡߳�ÿ���߳�������,һ����������ǰ������,����һ������ȴ�,ֱ�����̴߳������,��֪ͨ��һ��ҵ���̡߳� ����һ�����ǵȴ�����,����������,����һ��ҵ���̵߳�֪ͨ��һ����һ��ҵ����ɺ�,���ϱ����ѡ�
�����߳�B��˵,��Ҫ�ȴ�A���,�ȴ����������(A_B_mutex);��ʱ,�Լ�ҲҪ��ס����һ���߳��������,C����(B_C_mutex)������������������ӵ��B�C>C����,��������A�C>B����,�ȴ�A�������������,���ұ�֪ͨ���ѽ�����
���� ʵ������
�����ǵ�ҵ���С��������ĸ�����,�ֱ��Ƿ����ź�SendCom(); ͼ��ת��ImageConvert(); Ŀ����ObjectDetection();NMS���ز����㷨NMSResample()��
����֮�������,�ֱ�������������ݡ���ÿһ��,����Ҫ������һ��������,�Լ��ȴ���һ����ɡ�
����,Ŀ�����߳�,��Ҫͼ���ʽת���߳����,���ܽ���ͼ��ļ�⡣NMS�ز����߳�,��Ҫ��Ŀ������(Ŀ�����߳����),�����ۺϷ���,���֮��,��Ŀ���λ���źŷ���SendCom�߳�,���вɼ��źŷ��͡�����֮���γ��˱ջ�,��Ҫ��ij���߳�,��������,���ܴ�ͨ������ϵ�̵߳Ŀ�����
���,���������߳���,����������һ����,������������NMS�ز���֮�������ͨ�������,���Ǵ����̻߳��Ѷ��߳��е�NMSResample()�߳�,�Ӷ�������ˮ�����Ķ��̼߳��������ʽ��
���´�����:main_scan_mutex ������������̶߳���̵߳Ļ��ѡ�
2.1 ���߳�����
// MultiThreadSimulation.cpp : ���ļ����� "main" ����������ִ�н��ڴ˴���ʼ��������
//
#include <iostream>
#include <time.h>
#include <thread>
#include <condition_variable>
using namespace std;
/* condition lock, and mutex for thread controlling. */
mutex send_cvt_mutex,cvt_detect_mutex, detect_nms_mutex, nms_send_mutex, main_scan_mutex;
condition_variable send_cvt_cv, cvt_detect_cv, detect_nms_cv, nms_send_cv, main_scan_cv;
bool is_send_done = false;
bool is_cvt_done = false;
bool is_detect_done = false;
bool is_nms_done = false;
int total_scan_time = 0;
void threadSendCom()
{
cout << "1. Send Com Thread!" << endl;
while (total_scan_time < 5)
{
this_thread::sleep_for(chrono::microseconds(2));
unique_lock<mutex> send_cvt_lck(send_cvt_mutex);
unique_lock<mutex> nms_send_lck(nms_send_mutex);
nms_send_cv.wait(nms_send_lck, [] {return is_nms_done; });
cout << " >>>> Is send com: " << total_scan_time << endl;
this_thread::sleep_for(chrono::milliseconds(2));
is_send_done = true;
send_cvt_cv.notify_one();
is_nms_done = false;
}
cout << " Thread 1 end!" << endl;
}
void threadImageConvert()
{
cout << "2. Img convert Thread!" << endl;
while (total_scan_time < 5)
{
this_thread::sleep_for(chrono::microseconds(2));
unique_lock<mutex> cvt_detect_lck(cvt_detect_mutex);
unique_lock<mutex> send_cvt_lck(send_cvt_mutex);
send_cvt_cv.wait(send_cvt_lck, [] {return is_send_done; });
cout << " >>>> Is convert image: " << total_scan_time << endl;
this_thread::sleep_for(chrono::milliseconds(2));
is_cvt_done = true;
cvt_detect_cv.notify_one();
send_cvt_lck.unlock();
is_send_done = false;
}
cout << "Thread 2 end!" << endl;
}
void threadObjectDetection()
{
cout << "3. Object detect Thread!" << endl;
while (total_scan_time < 5)
{
this_thread::sleep_for(chrono::microseconds(2));
unique_lock<mutex> detect_nms_lck(detect_nms_mutex);
unique_lock<mutex> cvt_detect_lck(cvt_detect_mutex);
cvt_detect_cv.wait(cvt_detect_lck, [] {return is_cvt_done; });
cout << " >>>>Is object detect: " << total_scan_time << endl;
this_thread::sleep_for(chrono::milliseconds(2));
is_detect_done = true;
detect_nms_cv.notify_one();
cvt_detect_lck.unlock();
is_cvt_done = false;
}
cout << "Thread 3 end!" << endl;
}
void threadNMSResample()
{
cout << "4. Nms and resample Thread!" << endl;
while (total_scan_time < 5)
{
this_thread::sleep_for(chrono::microseconds(2));
unique_lock<mutex> nms_send_lck(nms_send_mutex);
if (total_scan_time == 0) //��һ��,�ȴ����̻߳��ѡ��Ӷ�����ѭ����
{
unique_lock<mutex> main_scan_lck(main_scan_mutex);
cout << "!!! Waiting here for main thread unlock mutex" << endl;
main_scan_cv.wait(main_scan_lck, [] {return is_detect_done; });
}
else
{
unique_lock<mutex> detect_nms_lck(detect_nms_mutex);
detect_nms_cv.wait(detect_nms_lck, [] {return is_detect_done; });
}
cout << " >>>> Is NMS resample:" << total_scan_time +1 << endl;
this_thread::sleep_for(chrono::milliseconds(2));
is_nms_done = true;
nms_send_cv.notify_one();
is_detect_done = false;
total_scan_time += 1;
}
cout << "Thread 4 end!" << endl;
}
int main()
{
// Resample --> SendCom --> ImgConvert --> ObjectDetection.
// �����̺߳���
thread nms_resample_thread(threadNMSResample);
thread send_com_thread(threadSendCom);
thread img_cvt_thread(threadImageConvert);
thread object_detect_thread(threadObjectDetection);
// ���߳� ������ ����֪ͨ threadNMSResample �߳�,����ѭ����
this_thread::sleep_for(chrono::milliseconds(100));
{
cout << ">>>> Main thread begin!!!!!!" << endl;
unique_lock<mutex> main_scan_lck(main_scan_mutex);
is_detect_done = true;
}
main_scan_cv.notify_one();
nms_resample_thread.join();
object_detect_thread.join();
img_cvt_thread.join();
send_com_thread.join();
cout << " End all" << endl;
}
2.2 ���߳�ģʽ����
(1) ���߳̿��������̻߳���
�����������,���̼߳��������ϵ������֮���γ��˱ջ�������Ҫ���߳�ȥ��������֪ͨ�� ��ɫ�ļ�ͷ��ʾ��
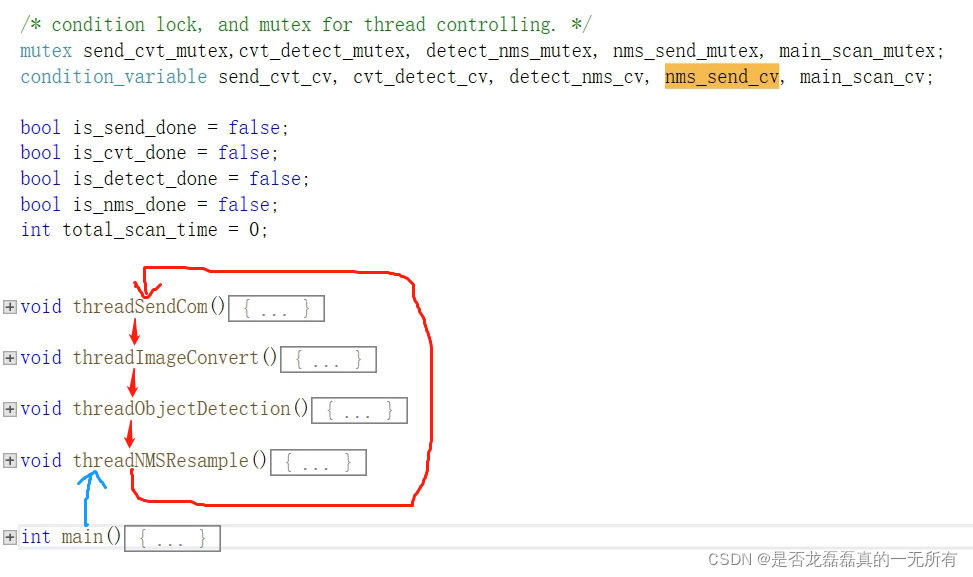
�������߳�ȥ����,����������������֪ͨ���õ�main_scan_cv������֪ͨ��

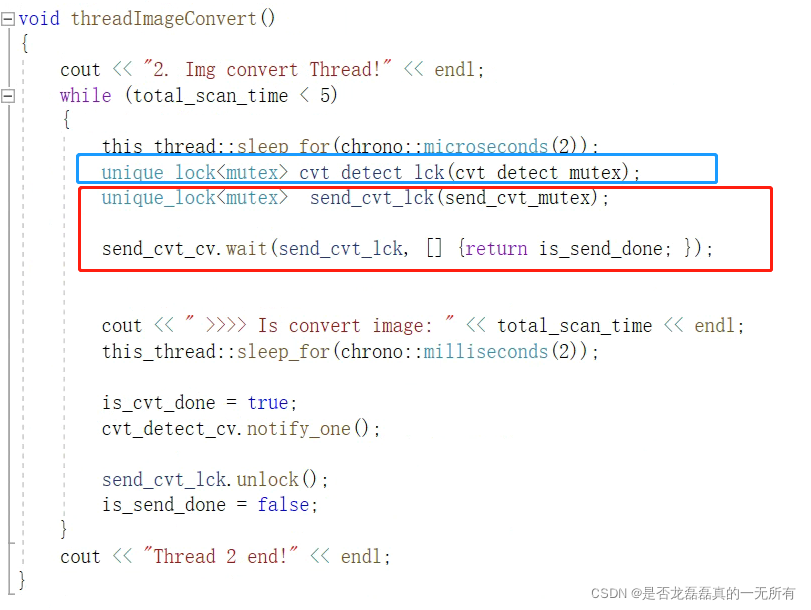
(2)���߳���Ҫ2����,һ����������,һ���ȴ��������ͷš�
�Ե����߳�,����Ҫ2����������,ͼ��ת���̡߳���������,�����ڷ��͵��ź�,SendCom�̴߳����Ľ��,������Ҫת����ͼ��ֻ��ͼ���ʽת�����֮��,Ŀ�����߳�,ObjectDetection���ܹ�������ô,���Ǿ���Ҫ����������
1:����ӵ�� cvt_detect_lck�����cvt_detect_mutex������Ȩ������һ��ģ��,Ŀ����Ŀ�������ס�� ���ڵ�ǰ��ͼ���ʽת��ҵ��,����һֱ�ȴ� ��һ��ģ��֪ͨ,���Ǿ�����������,send_cvt_cv ��wait��ֱ����һ��ģ��,����֪ͨ,������,�����Ѿ����,is_send_done��
2:��is_send_done��Ϊtrue�����ǾͲ���wait,����ִ�������ҵ��������Ҫsend_cvt_lck�� ����ӵ�к���ѯsend_cvt_lck��״̬������
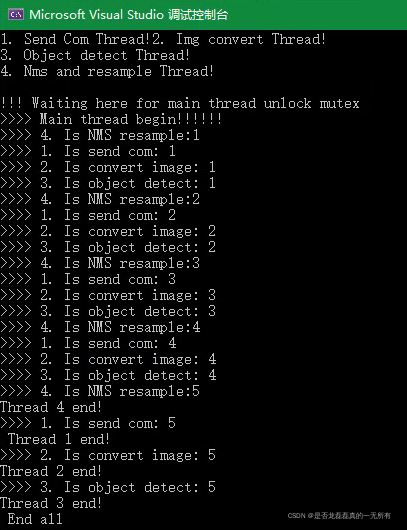
(3) ���н��չʾ
����,�������Ľ������,ÿ��ģ��,������������������������һ�Ρ�ʣ�¾��Ƕ��߳�֮��,�������������й��̡������������Ŀ��������5��,Ȼ���˳����������չʾ���н����