1 原理
八叉树其实是一种特殊的由上至下的体素,其构造原理在这里不再进行赘述,详细的构造方式可参考博客:https://blog.csdn.net/qq_32867925/article/details/109094719
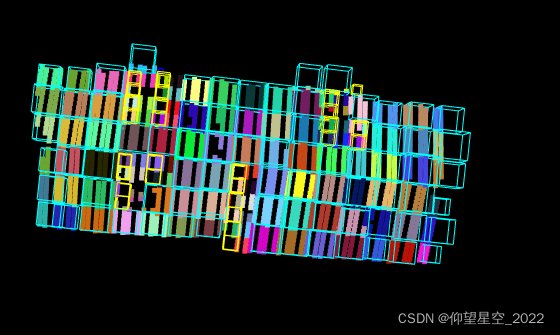
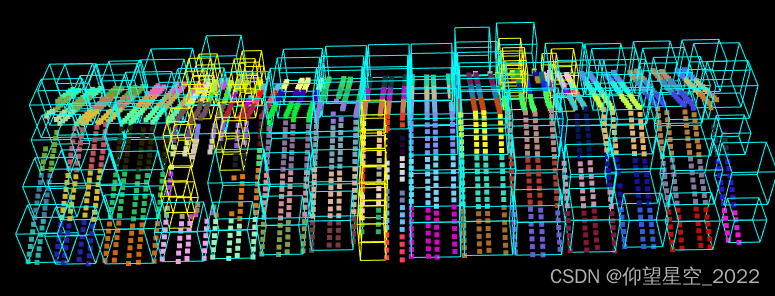
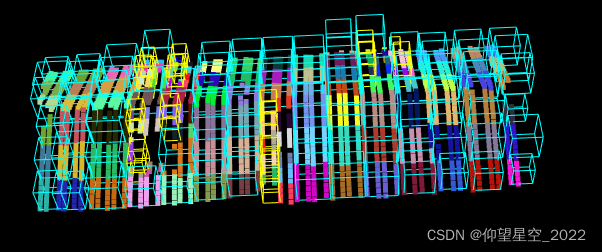
有时候为了将点云、构造的层次八叉树需要进行可视化,便于人理解以及检查构造八叉树是否合理。如下图示,可以看见其构建了2次八叉树,即蓝色框和黄色框所示,每一个体素内包含的点各不相同。更多层次的八叉树,如3层、4层等都是类似的。
2 可视化
PCL支持将上述可视化结果进行显示,下面代码示例了其可视化过程,也包括了八叉树的构建,但侧重于如何将八叉树进行可视化。
//可视化体素
void main()
{
IO IOject;
char *inputpath = "test.txt";
//char *inputpath = "D:\\LL\\individual_build.txt";
vector<pcl::PointXYZ> cloud = IOject.ReadPointXYZIntoVector(inputpath);
vector<grid> gridcluster;
double gridsize = 2.5;
gridpoint(cloud, gridcluster, gridsize);
//gridcluster 为格网化后的点集
vector<Cubic>allcubic;
vector<vector<pcl::PointXYZ>> multisegs;
for (int i = 0; i < gridcluster.size(); i++)
{
if (gridcluster[i].points.size()>0)
{
pcl::PointXYZ leftbottom, rightup;
GetMinBoundingCubic(gridcluster[i].points, leftbottom, rightup);
OctreeNode *root = new OctreeNode();
BuildOctree(root, leftbottom, rightup, gridcluster[i].points, 0.05);
vector<Cubic> cubics;
GetleafCubic(root, cubics);
for (int k = 0; k < cubics.size(); k++)
{
allcubic.push_back(cubics[k]);
}
//再添加点云数据
vector<vector<pcl::PointXYZ>> planecluster, nonplanecluster;
FalseCluster(root, planecluster, nonplanecluster);
for (int j = 0; j < planecluster.size(); j++)
{
multisegs.push_back(planecluster[j]);
}
}
}
pcl::visualization::PCLVisualizer viewer("voxel viewer");
viewer.setBackgroundColor(0, 0, 0);
struct myRGB
{
myRGB(double a, double b, double c)
{
this->R = a;
this->G = b;
this->B = c;
}
double R;
double G;
double B;
};
vector<myRGB> colors;
myRGB c1(255, 0, 0), c2(0, 255, 0), c3(0, 0, 255), c4(255, 255, 0), c5(0, 255, 255);
for (int i = 0; i < allcubic.size(); i++)
{
stringstream ss;
ss << i + 1;
string str;
ss >> str;
double length = allcubic[i].Upright.x - allcubic[i].Buttomleft.x;
if (length < gridsize/16)
{
viewer.addCube(allcubic[i].Buttomleft.x, allcubic[i].Upright.x, allcubic[i].Buttomleft.y, allcubic[i].Upright.y, allcubic[i].Buttomleft.z, allcubic[i].Upright.z, c1.R, c1.G, c1.B, str, 0);
}
else if (length >= gridsize / 16 && length < gridsize/8)
{
viewer.addCube(allcubic[i].Buttomleft.x, allcubic[i].Upright.x, allcubic[i].Buttomleft.y, allcubic[i].Upright.y, allcubic[i].Buttomleft.z, allcubic[i].Upright.z, c2.R, c2.G, c2.B, str, 0);
}
else if (length >= gridsize / 8 && length <gridsize/4)
{
viewer.addCube(allcubic[i].Buttomleft.x, allcubic[i].Upright.x, allcubic[i].Buttomleft.y, allcubic[i].Upright.y, allcubic[i].Buttomleft.z, allcubic[i].Upright.z, c3.R, c3.G, c3.B, str, 0);
}
else if (length >= gridsize / 4 && length < gridsize/2)
{
viewer.addCube(allcubic[i].Buttomleft.x, allcubic[i].Upright.x, allcubic[i].Buttomleft.y, allcubic[i].Upright.y, allcubic[i].Buttomleft.z, allcubic[i].Upright.z, c4.R, c4.G, c4.B, str, 0);
}
else
{
viewer.addCube(allcubic[i].Buttomleft.x, allcubic[i].Upright.x, allcubic[i].Buttomleft.y, allcubic[i].Upright.y, allcubic[i].Buttomleft.z, allcubic[i].Upright.z, c5.R, c5.G, c5.B, str, 0);
}
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, str);
//viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LUT_HSV, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, str);
}
// addCube (float x_min, float x_max, float y_min, float y_max, float z_min, float z_max,
//double r = 1.0, double g = 1.0, double b = 1.0, const std::string &id = "cube", int viewport = 0);
srand((int)time(0));
for (int i = 0; i < multisegs.size(); i++)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudptr(new pcl::PointCloud<pcl::PointXYZ>);
cloudptr = IOject.PointXYZ2Ptr(multisegs[i]);
stringstream ss;
ss << i + 1000;
string str;
ss >> str;
int R = rand() % 255;
int G = rand() % 255;
int B = rand() % 255;
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloudptr, R, G, B);//第二个平面颜色设置成蓝色 single_color_02
viewer.addPointCloud<pcl::PointXYZ>(cloudptr, single_color, str);//将single_color在viewer中进行显示
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, str);
}
while (!viewer.wasStopped())
{
viewer.spinOnce(1);
}
}
QQ录屏20220302110015