ƽ̨:��˶ Thinker Edge R ��о RK3399Pro
�̼��汾:Tinker_Edge_R-Debian-Stretch-V1.0.4-20200615
python3
�ο�����:Python3 ���߳� | ����̳�
���߳�������ͬʱִ�ж����ͬ����,���߳������������ŵ�:
????????ʹ���߳̿���ռ�ݳ�ʱ��ij����е�����ŵ���̨ȥ������
????????�û�������Ը���������,�����û������һ����ťȥ����ijЩ�¼��Ĵ���,���Ե���һ������������ʾ�����Ľ��ȡ�
????????����������ٶȿ��ܼӿ졣
????????��һЩ�ȴ�������ʵ�������û����롢�ļ���д�������շ����ݵ�,�߳̾ͱȽ������ˡ���������������ǿ����ͷ�һЩ������Դ���ڴ�ռ�õȵȡ�
????????ÿ���������߳���һ���������е���ڡ�˳��ִ�����кͳ���ij��ڡ������̲߳��ܹ�����ִ��,����������Ӧ�ó�����,��Ӧ�ó����ṩ����߳�ִ�п��ơ�
????????ÿ���̶߳������Լ���һ��CPU�Ĵ���,��Ϊ�̵߳�������,�������ķ�ӳ���߳��ϴ����и��̵߳�CPU�Ĵ�����״̬��
????????ָ��ָ��Ͷ�ջָ��Ĵ������߳�����������������Ҫ�ļĴ���,�߳������ڽ��̵õ������������е�,��Щ��ַ�����ڱ�־ӵ���̵߳Ľ��̵�ַ�ռ��е��ڴ档
????????�߳̿��Ա���ռ(�ж�)��
????????�������߳���������ʱ,�߳̿�����ʱ����(Ҳ��Ϊ˯��) �C ������̵߳����á�
�߳̿��Է�Ϊ:
�ں��߳�:�ɲ���ϵͳ�ں˴����ͳ�����
�û��߳�:����Ҫ�ں�֧�ֶ����û�������ʵ�ֵ��̡߳�
Python3 �߳��г��õ�����ģ��Ϊ:
_thread
threading(�Ƽ�ʹ��)
????????thread ģ���ѱ��������û�����ʹ�� threading ģ����档����,�� Python3 �в�����ʹ��"thread" ģ�顣Ϊ�˼�����,Python3 �� thread ������Ϊ ��_thread����
��ʼѧϰPython�߳�
_thread
�����:
_thread �� �ͼ��߳� API
python _threadģ��ʹ��
Python��ʹ���߳������ַ�ʽ:����������������װ�̶߳���
????????_threadģ���ṩ�˲�������߳�(Ҳ����Ϊ ���������� �� ����)�ĵײ�ԭ�� ���� ��������̹߳���ȫ�����ݿռ䡣Ϊ�˴���ͬ������,Ҳ�ṩ�˼�������(Ҳ��Ϊ ������ �� �������ź�)��threading ģ����ڸ�ģ���ṩ�˸����õĸ����߳� API��
????????�� 3.7 �����: ���ģ������Ϊ��ѡ��,���������ǿ��á�
�����ͺ���:
exception _thread.error
????????�����߳���ش���ʱ�׳���
????????�� 3.3 �����: �������ڽ��쳣
RuntimeError�ı�����
_thread.LockType
????????����������͡�
_thread.start_new_thread(function, args[, kwargs])
????????����һ�����̲߳��������ʶ�� �߳�ִ�к���
function�����������б�args(������Ԫ��)�� ��ѡ��kwargs����ָ��һ���ؼ��ֲ����ֵ䡣
????????����������ʱ,�̻߳ᾲĬ���˳���
????????��������ij��δ�����쳣���ս�ʱ,sys.unraisablehook()�ᱻ�����Դ����쳣�� ���Ӳ�����object����Ϊfunction�� ��Ĭ�������,���ӡ��ջ����Ȼ����߳̽��˳�(�������̻߳��������)��
????????����������SystemExit�쳣ʱ,���ᱻ��Ĭ�غ��ԡ�
????????�� 3.8 �����: ���ڻ�ʹ��
sys.unraisablehook()������δ�������쳣��
????????����ʽ:���� _thread ģ���е�start_new_thread()�������������̡߳������:
_thread.start_new_thread ( function, args[, kwargs] )
����˵��:
function- �̺߳�����
args- ���ݸ��̺߳����IJ���,�������Ǹ�tuple���͡�
kwargs- ��ѡ������
_thread.interrupt_main(signum=signal.SIGINT, /)
????????ģ��һ���źŵ������̵߳�Ч���� �߳̿�ʹ�ô˺�����������߳�,��Ȼ������֤��Ͻ�����������
????????�������signum,���ʾҪģ����źŵı�š�
????????���δ����signum,��ģ��signal.SIGINT�� ��� Pythonû�д����������ź� (������Ϊsignal.SIG_DFL��signal.SIG_IGN),�˺����������κβ�����
????????�� 3.10�����: ������
signum�����������źŵı�š�
???????? ע�� �Ⲣ���ᷢ����Ӧ���źŶ��ǽ�һ���������������������ļƻ�����(���������ڵĻ�)�� �������Ҫ��ķ����ź�,��ʹ��
????????signal.raise_signal()��
_thread.exit()
????????�׳�
SystemExit�쳣�����û�в���Ļ�,����쳣��ʹ�߳��˳���
_thread.allocate_lock()
????????����һ���µ����������еķ����ں�����������ʼ����������ڽ���״̬��
_thread.get_ident()
????????���ص�ǰ�̵߳� ���̱߳�ʶ����������һ�����������������ֵû��ֱ�Ӻ���,��Ҫ������
magic cookie,������Ϊ�����߳�������ݵ��ֵ���������̱߳�ʶ�����ܻ����߳��˳�,���̴߳���ʱ�����á�
_thread.get_native_id()
????????�����ں˷������ǰ�̵߳�ԭ�������߳� ID�� ����һ���Ǹ�����������ֵ�ɱ�����������ϵͳ��Ψһ�ر�ʶ����ض��߳�(ֱ���߳��ս�,����֮���ֵ���ܻᱻ OS ����������)��
????????������: Windows, FreeBSD, Linux, macOS, OpenBSD, NetBSD, AIX��
????????3.8 �°湦��.
_thread.stack_size([size])
���ش����߳�ʱʹ�õĶ�ջ��С����ѡ���� size ָ��֮���½����̵߳Ķ�ջ��С,����һ��Ҫ��0(����ƽ̨����Ĭ������)������С��32,768(32KiB)��һ������������� size û��ָ��,Ĭ����0�������֧�ָı��̶߳�ջ��С,���׳�
RuntimeError�������ָ���Ķ�ջ��С���Ϸ�,���׳�ValueError�����Ҳ����Ķ�ջ��С��32KiB�ǵ�ǰ��С���ܱ�֤���������㹻��ջ�ռ�Ķ�ջ��С����Ҫע����Dz���ƽ̨���ڶ�ջ��С�����ض�������,����Ҫ�����32KiB�Ķ�ջ��С������Ҫ����ϵͳ�ڴ�ҳ������������з���
- Ӧ������ƽ̨�ĵ��й���ϸ��Ϣ(4KiBҳ��Ƚ��ձ�,��û�и�������Ϣ�������,����ķ�����ʹ��4096�ı�����Ϊ��ջ��С)��
������: Windows,���� POSIX �̵߳�ϵͳ��
_thread.TIMEOUT_MAX
????????
Lock.acquire()������timeout�������������ֵ�����볬�����ֵ��timeout���׳�OverflowError�쳣��
????????3.2 �°湦��.
������
lock.acquire(waitflag=1, timeout=- 1)
????????û���κο�ѡ����ʱ,�÷�����������������,�б�Ҫ�Ļ���ȴ������߳��ͷ���(ͬʱֻ��һ���߳��ܻ���� ���� �����������ڵ�ԭ��)��
????????������������Ͳ���waitflag,�������Ϊȡ���ڴ����ֵ:����� 0 �Ļ�,ֻ�����ܹ����̻�ȡ����ʱ�Ż�ȡ,����ȴ�,����Ƿ���Ļ�,����֮ǰ�ᵽ��һ��,��������ȡ����
????????�������������������timeout,�൱��ָ���˷���֮ǰ�ȴ������������������븺��timeout,�൱�������ڵȴ������waitflag�� 0 �Ļ�,����ָ��timeout��
????????����ɹ���ȡ�����᷵��True,����False��
????????�� 3.2 �����: �µ�
timeout�βΡ�
????????�� 3.2 �����: ���ڻ�ȡ���IJ������Ա�POSIX�ź��жϡ�
lock.release()
????????�ͷ������������Ѿ�����ȡ��,����һ����ͬһ���̻߳�ȡ�ġ�
lock.locked()
��������״̬:����ѱ�ij���̻߳�ȡ,����
True,����False��
������Щ����֮��,������Ҳ����ͨ��
with���ʹ��,����:
import _thread
a_lock = _thread.allocate_lock()
with a_lock:
print("a_lock is locked while this executes")
ע������:
????????�߳����ж���ֵؽ���:KeyboardInterrupt �쳣���ܻᱻ����һ���̲߳���(��� signal ģ����õĻ�,�ж����ǻ�������̡߳�)
????????���� sys.exit() �����׳� SystemExit �쳣��Ч�ڵ��� _thread.exit()��
????????�������ж����� acquire() ���� ���� KeyboardInterrupt һ����������ȡ��֮������
????????�����߳��˳�ʱ,��ϵͳ���������߳��Ƿ���ڴ����ϵͳ��,��Щ�̻߳�ֱ�ӱ�ɱ��,����ִ�� try ... finally ���,Ҳ����ִ�ж�������������
????????�����߳��˳�ʱ,���������������������(����ʹ���� try ... finally ���),�� I/O �ļ�Ҳ����ˢ�¡�
���û�������
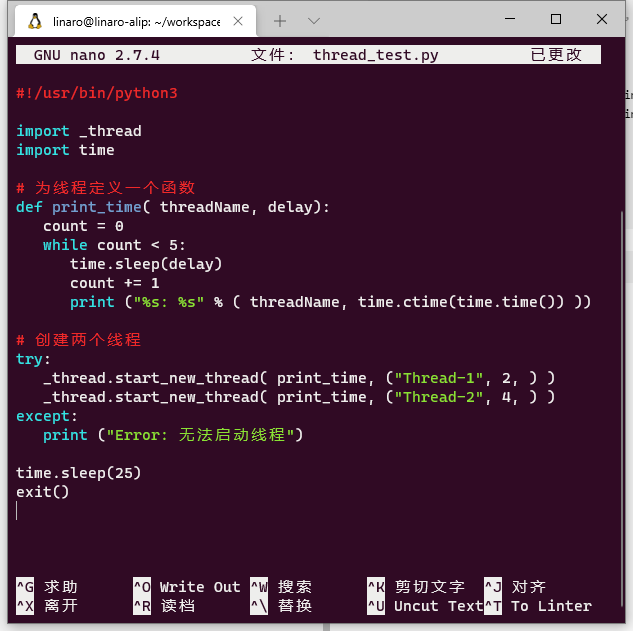
????????�ں��ʵĵط���д���Դ���:
nano thread_test.py
#!/usr/bin/python3
import _thread
import time
# Ϊ�̶߳���һ������
def print_time( threadName, delay):
count = 0
while count < 5:
time.sleep(delay)
count += 1
print ("%s: %s" % ( threadName, time.ctime(time.time()) ))
# ���������߳�
try:
_thread.start_new_thread( print_time, ("Thread-1", 2, ) )
_thread.start_new_thread( print_time, ("Thread-2", 4, ) )
except:
print ("Error: �������߳�")
time.sleep(25)
exit()
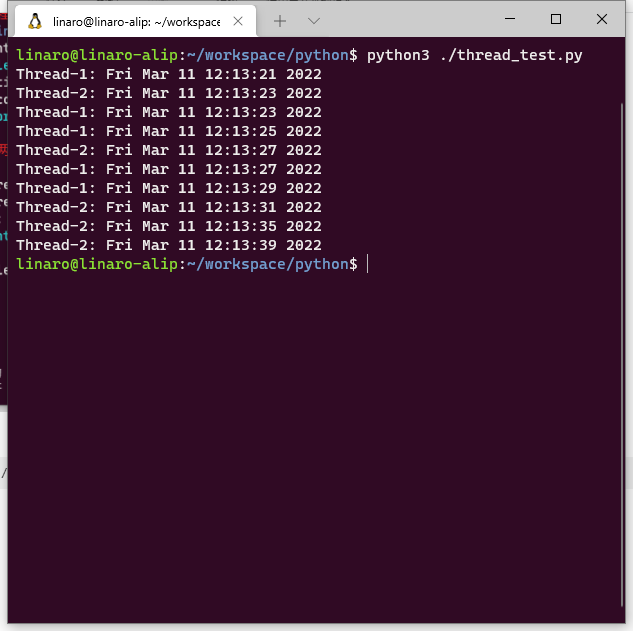
python3 ./thread_test.py
�����߳�ͬ��
????????�������̹߳�ͬ��ij��������,����ܳ��ֲ���Ԥ�ϵĽ��,Ϊ�˱�֤���ݵ���ȷ��,��Ҫ�Զ���߳̽���ͬ����
????????���̵߳��������ڿ���ͬʱ���ж������(���ٸо�����������)�����ǵ��߳���Ҫ��������ʱ,���ܴ������ݲ�ͬ�������⡣
????????��������һ�����:һ���б�������Ԫ�ض���0,�߳�"set"�Ӻ���ǰ������Ԫ�ظij�1,���߳�"print"�����ǰ�����ȡ�б�����ӡ��
????????��ô,�����߳�"set"��ʼ�ĵ�ʱ��,�߳�"print"������ӡ�б���,����ͳ���һ��0һ��1,��������ݵIJ�ͬ����Ϊ�˱����������,���������ĸ��
????????��������״̬����������δ������ÿ��һ���̱߳���"set"Ҫ���ʹ�������ʱ,�����Ȼ������;����Ѿ��б���̱߳���"print"���������,��ô�����߳�"set"��ͣ,Ҳ����ͬ������;�ȵ��߳�"print"�������,�ͷ����Ժ�,�����߳�"set"������
????????���������Ĵ���,��ӡ�б�ʱҪôȫ�����0,Ҫôȫ�����1,�����ٳ���һ��0һ��1�����γ��档
ʾ��:
????????�����̻߳�������������Ӣ
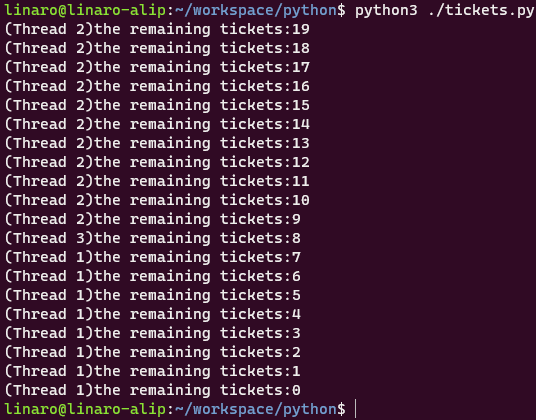
????????��������߳�ģ���Ʊ��Ʊϵͳ;�����߳�����Ʊʱ������Ʊ,����ӡ���ÿ��ʣ���Ʊ����

nano tickets.py
#!/usr/bin/python3
import _thread
import time
M = 3
tickets = 20
locks = []
for _ in range(M): # ÿ���̷߳���һ����
lock_temp = _thread.allocate_lock()
lock_temp.acquire()
locks.append(lock_temp)
def fun(ID):
global tickets
global locks
while True:
if tickets > 0:
time.sleep((ID + 1)/10)
tickets -= 1
print("(Thread %d)the remaining tickets:%d" %(ID + 1, tickets))
else:
locks[ID].release()
return
for _ in range(M):
_thread.start_new_thread(fun, (_,))
for _ in range(M): # �ȴ������߳̽���(�ȴ���Ӧ��������)
while(locks[_].locked()):
pass
python3 ./tickets.py
????????��ͼ��ʾ,��Ʊ�����г����˴����Ʊ��:
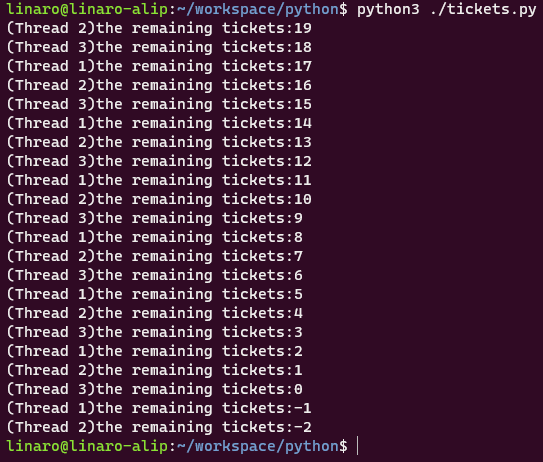
????????���û������ij���:
#!/usr/bin/python3
import _thread
import time
M = 3
tickets = 20
locks = []
lock = _thread.allocate_lock()
for _ in range(M): # ÿ���̷߳���һ����
lock_temp = _thread.allocate_lock()
lock_temp.acquire()
locks.append(lock_temp)
def fun(ID):
global tickets
global lock
global locks
while True:
lock.acquire() # ����
if tickets > 0:
time.sleep((ID + 1)/10)
tickets -= 1
print("(Thread %d)the remaining tickets:%d" %(ID + 1, tickets))
lock.release() # ����
if not tickets > 0:
locks[ID].release()
return
for _ in range(M):
_thread.start_new_thread(fun, (_,))
for _ in range(M): # �ȴ������߳̽���(�ȴ���Ӧ��������)
while(locks[_].locked()):
pass
????????��ͼ��ʾ,Ʊ�����ٳ��ִ���
threading
????????��Դ:threading �� �����̵߳IJ���
????????���ģ���ڽϵͼ���ģ�� _thread �����Ͻ����ϸ����߳̽ӿڡ��μ�: queue ģ�顣
????????�� 3.7 �����: ���ģ������Ϊ��ѡ��,���������ǿ��á�
ע�� �� Python 2.x ϵ����,��ģ�������ijЩ�����ͺ���
camelCase��ʽ�����ơ� ������ Python 3.10 ��������,��Ϊ���� Python 2.5 �����ɰ汾�ļ����Զ����ܵ�֧�֡�
????????CPython implementation detail: �� CPython ��,���ڴ��� ȫ�ֽ�������,ͬһʱ��ֻ��һ���߳̿���ִ�� Python ����(��ȻijЩ���ܵ���Ŀ���ܻ�ȥ��������)�� ������������Ӧ�ø��õ����ö���ļ�����ļ�����Դ,�Ƽ���ʹ�� multiprocessing �� concurrent.futures.ProcessPoolExecutor�� ����,�������Ҫͬʱ���ж�� I/O �ܼ�������,����߳���Ȼ��һ�����ʵ�ģ�͡�
����
threading.active_count()
????????���ص�ǰ����
Thread����������� ����ֵ��enumerate()�����ص��б�����һ�¡�????????����
activeCount�Ǵ˺����������ñ�����
threading.current_thread()
????????���ص�ǰ��Ӧ�����ߵĿ����̵߳�
Thread������������ߵĿ����̲߳�������threading����,�᷵��һ���������������̶߳���????????����
currentThread�Ǵ˺����������ñ�����
threading.excepthook(args, /)
????????������
Thread.run()������δ�����쳣��
????????
args����������������:
????????exc_type: �쳣����
????????exc_value: �쳣ֵ,������None.
????????exc_traceback: �쳣����,������None.
????????thread: �����쳣���߳�,����ΪNone��
????????���
exc_typeΪSystemExit,���쳣�ᱻ��Ĭ�غ��ԡ� �����������,�쳣������ӡ��sys.stderr��
????????����˺����������쳣,������sys.excepthook()����������
????????threading.excepthook()���Ա������Կ�����Thread.run()������δ�����쳣�Ĵ�����ʽ��
????????ʹ�ö��ƹ��Ӵ��exc_value���ܻᴴ������ѭ���� ��Ӧ���ڲ�����Ҫ�쳣ʱ����ʽ������Դ�������ѭ����
????????���һ���������ڱ�����,��ôʹ���Զ���Ĺ��Ӵ���thread���ܻὫ�临������Զ��平����Ч����ⴢ��thread,�Ա������ĸ��
????????�μ�
sys.excepthook()����δ������쳣��
????????3.8 �°湦��.
threading.__excepthook__
????????����
threading.excepthook()��ԭʼֵ�� ���������Ա���ԭʼֵ���ɱ���������������滻������¿ɱ��ָ���
????????3.10 �°湦��.
threading.get_ident()
????????���ص�ǰ�̵߳� ���̱߳�ʶ����������һ�����������������ֵû��ֱ�Ӻ���,��Ҫ������
magic cookie,������Ϊ�����߳�������ݵ��ֵ���������̱߳�ʶ�����ܻ����߳��˳�,���̴߳���ʱ�����á�
????????3.3 �°湦��.
threading.get_native_id()
????????�����ں˷������ǰ�̵߳�ԭ�������߳� ID�� ����һ���Ǹ������� ����ֵ�ɱ�����������ϵͳ��Ψһ�ر�ʶ����ض��߳�(ֱ���߳��ս�,����֮���ֵ���ܻᱻ OS ����������)��
������: Windows, FreeBSD, Linux, macOS, OpenBSD, NetBSD, AIX��
3.8 �°湦��.
threading.enumerate()
????????���ص�ǰ���д���
Thread������б��� ���б������ػ��߳��Լ�current_thread()�����Ŀ��̡߳� �����������ս�ĺ���δ��ʼ���̡߳� ����,���߳̽����ǽ����һ����,��ʹ�������ս��ʱ��
threading.main_thread()
????????������
Thread����һ�������,���߳���Python��������ʼʱ�������̡߳�
????????3.4 �°湦��.
threading.settrace(func)
����
threadingģ�鿪ʼ���߳������ٺ�������ÿ���̵߳�run()����������ǰ,func�ᱻ���ݸ�sys.settrace()��
threading.gettrace()
������
settrace()���õĸ��ٺ�����
3.10 �°湦��.
threading.setprofile(func)
????????����
threadingģ�鿪ʼ���߳��������ܲ��Ժ�������ÿ���̵߳�run()����������ǰ,func�ᱻ���ݸ�sys.setprofile()��
threading.getprofile()
????????������
setprofile()���õ����ܷ���������
????????3.10 �°湦��.
threading.stack_size([size])
????????���ش����߳�ʱʹ�õĶ�ջ��С����ѡ���� size ָ��֮���½����̵߳Ķ�ջ��С,����һ��Ҫ��0(����ƽ̨����Ĭ������)������С��32,768(32KiB)��һ������������� size û��ָ��,Ĭ����0�������֧�ָı��̶߳�ջ��С,���׳�
RuntimeError�������ָ���Ķ�ջ��С���Ϸ�,���׳�ValueError�����Ҳ����Ķ�ջ��С��32KiB�ǵ�ǰ��С���ܱ�֤���������㹻��ջ�ռ�Ķ�ջ��С����Ҫע����Dz���ƽ̨���ڶ�ջ��С�����ض�������,����Ҫ�����32KiB�Ķ�ջ��С������Ҫ����ϵͳ�ڴ�ҳ������������з��� - Ӧ������ƽ̨�ĵ��й���ϸ��Ϣ(4KiBҳ��Ƚ��ձ�,��û�и�������Ϣ�������,����ķ�����ʹ��4096�ı�����Ϊ��ջ��С)��
????????������: Windows,���� POSIX �̵߳�ϵͳ��
����
threading.TIMEOUT_MAX
????????��������(
Lock.acquire(), RLock.acquire(), Condition.wait(), ...)���β�timeout���������ֵ�����볬�����ֵ��timeout���׳�OverflowError�쳣��
????????3.2 �°湦��.
��
????????��ģ�����ƻ��� Java���߳�ģ�͡� ����,��Java����,��������������ÿ������Ļ�������,����Python����,��Щ���������˵����Ķ��� Python �� Thread ��ֻ�� Java �� Thread ���һ���Ӽ�;Ŀǰ��û�����ȼ�,û���߳���,�̻߳����ܱ����١�ֹͣ����ͣ���ָ����жϡ� Java �� Thread ��ľ�̬������ʵ��ʱ��ӳ��Ϊģ�鼶������
????????����������ִ�ж���ԭ���Եġ�
�̱߳�������
????????�̱߳����������ض��̵߳����ݡ������̱߳�������,ֻ��Ҫ����һ�� local (����һ��������)��ʵ������ʵ���д�������:
mydata = threading.local()
mydata.x = 1
????????�ڲ�ͬ���߳���,ʵ����ֵ�ͬ��
class threading.local
????????һ�������̱߳������ݵ��ࡣ
????????�������ϸ�ںʹ���ʾ��,�μ�
_threading_localģ����ĵ���
�̶߳���
????????(����)Thread���ʾһ���ڶ����Ŀ����߳������еĻ�������ַ�������ָ���:ͨ�����캯������һ���ɵ��õĶ���,����ͨ������������дrun()��������������(���˹��캯��)��Ӧ���������б����ǡ����仰˵,ֻ���������� __init__() �� run() ������
????????���̶߳���һ��������,��һ����������̵߳� start() ������ʼ������ڶ����Ŀ����̵߳��� run() ������
????????һ���̻߳��ʼ,���̻߳ᱻ��Ϊ�� �����ġ� �������� run() �����ս���(�����������Ļ����׳�δ���������쳣),�Ͳ��ǡ����ġ��� is_alive() �������ڼ���߳��Ƿ��
????????�����߳̿��Ե���һ���̵߳� join() ����������������ø÷������߳�,ֱ�������� join() �������߳��սᡣ
????????�߳������֡����ֿ��Դ��ݸ����캯��,Ҳ����ͨ�� name ���Զ�ȡ�����ġ�
????????��� run() �����������쳣,������ threading.excepthook() ���������� ��Ĭ�������,threading.excepthook() �ᾲĬ�غ��� SystemExit��
????????һ���߳̿��Ա���dz�һ�����ػ��̡߳��� �����ʶ��������,��ʣ�µ��̶߳����ػ��߳�ʱ,���� Python �����˳��� ��ʼֵ�̳��ڴ����̡߳� �����ʶ����ͨ�� daemon �������Ի��� daemon ���������������á�
????????ע�� �ػ��߳��ڳ���ر�ʱ��ͻȻ�رա����ǵ���Դ(�����Ѿ����ĵ�,���ݿ�����ȵ�)����û�б���ȷ�ͷš������������߳�����ֹͣ,�������dz�Ϊ���ػ�ģʽ����ʹ�ú��ʵ��źŻ���,����:
Event��
????????�и� �����̡߳� ����;���ӦPython���������ʼ�Ŀ����̡߳�������һ���ػ��̡߳�
????????�������̶߳��� �ǿ��Ա������ġ���Щ�Ƕ�Ӧ�ڡ��ⲿ�̡߳����̶߳���,���������߳�ģ���ⲿ�����Ŀ����߳�,����ֱ������C���롣�����̶߳���������;�������DZ���Ϊ�Ǵ��ĺ��ػ�ģʽ,���ܱ� join() ����Ϊ����������̵߳��ս�,������Զ���ᱻɾ����
class threading.Thread(group=None, target=None, name=None, args=(), kwargs={}, *, daemon=None)
????????����������캯��ʱ,������йؼ��ֲ�������������:
????????
groupӦ��ΪNone;Ϊ���պ���չThreadGroup��ʵ�ֶ�������????????
target������run()�������õĿɵ��ö���Ĭ����None,��ʾ����Ҫ�����κη�����????????
name���߳����ơ� ��Ĭ�������,���� ��Thread-N�� ����ʽ����Ψһ����,���� N Ϊһ����С��ʮ������ֵ,���� ��Thread-N (target)�� ����ʽ,���� ��target�� Ϊtarget.__name__,���ָ����target�����Ļ���????????
args�����ڵ���Ŀ�꺯���IJ���Ԫ�顣Ĭ����()��????????
kwargs�����ڵ���Ŀ�꺯���Ĺؼ��ֲ����ֵ䡣Ĭ����{}��????????�������
None,daemon��������ʽ�����ø��߳��Ƿ�Ϊ�ػ�ģʽ�� �����None(Ĭ��ֵ),�߳̽��̳е�ǰ�̵߳��ػ�ģʽ���ԡ�????????��������������˹��캯��,��һ��Ҫȷ�������κ���ǰ,�ȷ�����û������(
Thread.__init__())��
????????�� 3.10 �����: ʹ��
target����,���name������ʡ�ԵĻ���????????�� 3.3 �����: ����
daemon������
????????start()
????????��ʼ�̻߳��
????????����һ���߳������ֻ�ܱ�����һ�Ρ������Ŷ����
run()������һ�������Ŀ��ƽ����е��á�????????���ͬһ���̶߳����е�����������Ĵ�������һ��,���׳�
RuntimeError��
????????run()
????????�����̻߳�ķ�����
????????���������������������������� ����
run()���������Ϊtarget�������ݸ��ö��������Ŀɵ��ö���(�������)�������,��������args��kwargs�����ֱ��ȡ��λ�úؼ��ֲ�����
????????join(timeout=None)
????????�ȴ�,ֱ���߳��սᡣ���������������������߳�,ֱ��������
join()���߳��ս� �C �����������սỹ���׳�δ�����쳣 �C ����ֱ��������ʱ,��ʱѡ���ǿ�ѡ�ġ�
????????��timeout�������ڶ��Ҳ���Noneʱ,��Ӧ����һ������ָ��������ʱ������Ϊ��λ�ĸ��������߷�������Ϊjoin()���Ƿ���None,������һ��Ҫ��join()�����is_alive()�����ж��Ƿ�����ʱ �C ����߳���Ȼ���,��join()��ʱ��
????????��timeout���������ڻ�����None,�������������ֱ���߳��սᡣ
????????һ���߳̿��Ա�join()�ܶ�Ρ�
????????������Լ��뵱ǰ�̻߳ᵼ������,join()������RuntimeError�쳣���������join()һ����δ��ʼ���߳�,Ҳ���׳���ͬ���쳣��
????????name
????????ֻ����ʶ����ַ�������û�����塣����߳̿��Ը�����ͬ�����ơ� ��ʼ�����ɹ��캯�����á�
????????getName()
????????setName()
????????�ѱ����õ�
name��ȡֵ/��ֵ API;���Ϊֱ�����������Է�ʽʹ������
????????3.10 ������Ƴ�.
????????ident
????????����̵߳� ���̱߳�ʶ����,����߳���δ��ʼ��Ϊ None �����Ǹ������������μ� get_ident() ��������һ���߳��˳�������һ���̱߳�����,�̱߳�ʶ���ᱻ���á���ʹ�߳��˳���,�Կɵõ���ʶ����
????????native_id
????????���̵߳��߳� ID (TID),�� OS (�ں�) ���䡣 ����һ���Ǹ�����,��������̻߳�δ������Ϊ
None�� �����get_native_id()������ ���ֵ�ɱ�������ȫϵͳ��Χ��Ψһ�ر�ʶ����ض��߳� (ֱ���߳��ս�,����֮���ֵ���ܻᱻ OS ����������)��
????????ע�� �����ڽ��� ID,�߳� ID ����Ч��(ȫϵͳ��Χ�ڱ�֤Ψһ)�����̱߳�������ʼֱ���̱߳��սᡣ
????????������: ��Ҫ
get_native_id()������
????????3.8 �°湦��.
????????is_alive()
????????�����߳��Ƿ��
????????�� run() �����տ�ʼֱ��run()�����ս���,�����������True��ģ�麯��enumerate()���ذ������д���̵߳��б���
????????daemon
????????(����)һ������ֵ,��ʾ���߳��Ƿ����ػ��߳�(
True)����(False)�����ֵ������start()������֮ǰ����,���������RuntimeError�����ij�ʼֵ�̳��Դ����߳�;���̲߳����ػ��߳�,��������߳��д����������̶߳�Ĭ��Ϊdaemon = False��
????????��û�д��ķ��ػ��߳�ʱ,����Python����Ż��˳���
????????isDaemon()
????????setDaemon()
????????�ѱ����õ�
daemon��ȡֵ/��ֵ API;���Ϊֱ�����������Է�ʽʹ������
????????3.10 ������Ƴ�.
������
????????ԭʼ����һ��������ʱ�������ض��̵߳�ͬ����Ԫ�������Python��,�������õ���ͼ���ͬ����Ԫ���,�� _thread ��չģ��ֱ��ʵ�֡�
????????ԭʼ������ �������� ���� ���������� ����״̬֮һ����������ʱΪ������״̬������������������, acquire() �� release() ����״̬Ϊ������ʱ, acquire() ��״̬��Ϊ ���� ���������ء���״̬������ʱ, acquire() �������������̵߳��� release() �����Ϊ������״̬,Ȼ�� acquire() ����������Ϊ����״̬�����ء� release() ֻ������״̬�µ���; ����״̬��Ϊ���������������ء���������ͷ�һ������������,������� RuntimeError �쳣��
????????��ͬ��֧�� �����Ĺ���Э�顣
????????������߳��� acquire() �ȴ�״̬ת��Ϊδ����������,Ȼ�� release() ����״̬Ϊδ����ʱ,ֻ��һ���߳��ܼ���ִ��;�����ĸ��ȴ��̼߳���ִ��û�ж���,���һ����ʵ�ֶ���ͬ��
????????���з�����ִ�ж���ԭ���Եġ�
class threading.Lock
????????ʵ��ԭʼ��������ࡣһ��һ���̻߳��һ����,����������Ի�������߳�,ֱ�������ͷ�;�κ��̶߳������ͷ�����
????????��Ҫע����� Lock ��ʵ��һ����������,����ƽ̨֧�ֵľ�������������Ч�İ汾��ʵ����
????????acquire(blocking=True, timeout=- 1)
????????����������������ػ������
????????������ʱ����blocking����ΪTrue(ȱʡֵ),����ֱ�������ͷ�,Ȼ��������������True��
????????�ڲ���blocking������ΪFalse������µ���,�����ᷢ���������������ʱblocking��ΪTrue������,����������False;����,��������������True��
????????(����)�����ø���timeout��������Ϊ��ֵʱ,��������timeoutָ��������,ֻҪ�����ܱ���ȡ�Ϳ��ԡ����timeout����Ϊ-1,��ָ��һ�������Ƶĵȴ����Ͻ���blockingΪ��ʱָ��timeout��
????????����ɹ������,��True,����False(���緢�� ��ʱ ��ʱ��)��
????????�� 3.2 �����: �µ�
timeout�βΡ�
????????�� 3.2 �����: ��������ײ��߳�ʵ��֧��,�����ͨ��POSIX�ϵ��ź��ж����Ļ�ȡ��
????????release()
????????�ͷ�һ��������������������κ��߳��е���,����ָ��������̡߳�
????????����������,��������Ϊδ����,�����ء���������߳����ڵȴ������������������,ֻ��������һ��������
????????����δ���������Ϸ������ʱ,������RuntimeError��
????????û�з���ֵ��
????????locked()
????????����������,����
True��
�ݹ�������
????????��������һ�����Ա�ͬһ���̶߳�λ�ȡ��ͬ����Ԫ��������ڲ�,���ڻ�Ԫ��������/������״̬�ϸ����� �������̡߳� �� ���ݹ�ȼ��� �ĸ��������״̬��,ijЩ�߳�ӵ���� ; �ڷ�����״̬��, û���߳�ӵ������
????????��Ҫ������,�̵߳����� acquire() ����;һ���߳�ӵ������,���������ء���Ҫ����,�̵߳��� release() ������ acquire()/release() �Կ���Ƕ��;ֻ������ release() (������һ�Ե� release() ) �����,�����������̼߳������� acquire() ������
????????�ݹ���Ҳ֧�� �����Ĺ���Э�顣
class threading.RLock
????????����ʵ�������������������������ɻ�ȡ�����߳��ͷš�һ���̻߳����������,ͬһ���߳��ٴλ�ȡ����������;�̱߳�����ÿ�λ�ȡ��ʱ�ͷ�һ�Ρ�
????????��Ҫע�����RLock��ʵ��һ����������,����ƽ̨֧�ֵľ���ݹ�����������Ч�İ汾��ʵ����
????????acquire(blocking=True, timeout=- 1)
????????����������������ػ������
????????����������ʱ: �������߳��Ѿ�ӵ����,�ݹ鼶������һ,���������ء�����,��������߳�ӵ�и���,������������������һ����������(�������κ��߳�),����������Ȩ,���õݹ�ȼ�Ϊһ,�����ء��������̱߳�����,�ȴ���������,һ��ֻ��һ���߳���������������Ȩ�������������,û�з���ֵ��
????????(����)������
blocking��������Ϊ "True"ʱ,���������ʱ��ͬ��������,������ ��True����
????????������ʱ��blocking��������ΪFalseʱ,�����������û�в����ĵ��û�����,��������False;����,����û�в����ĵ���һ��������,������True��
????????�����ø���timeout��������Ϊ��ֵʱ,�������ʱ��Ϊtimeoutָ��������,ֻҪ�����ܱ���ȡ��������Ѿ�����ȡ,����True;���timeout�ѹ�,����False��
????????�� 3.2 �����: �µ�
timeout�βΡ�
????????release()
????????�ͷ���,�Լ��ݹ�ȼ������������,��������Ϊ������״̬(�����κ��߳�ӵ��),����,��������߳����������ŵȴ���������,�����������һ���̼߳���������Լ���,�ݹ�ȼ���Ȼ������,������������,���ɵ����߳�ӵ�С�
????????ֻ�е�ǰ�߳�ӵ�������ܵ��������������������ͷź�����������,������RuntimeError�쳣��
????????û�з���ֵ��
��������
????????��������������ij�����͵������������,���������ͨ��������,������ȱʡ��������Զ����������������������Ҫ����ͬһ����ʱ,����һ���������á��������������һ����,�㲻�ص����ظ�������
????????����������ѭ �����Ĺ���Э�� :ʹ�� with ����������Χ�Ĵ�����ڻ�ȡ���������� acquire() �� release() ����Ҳ�ܵ��ù���������ط�����
????????�������������ڳ��й�������������µ��á� wait() �����ͷ���,Ȼ������ֱ�������̵߳��� notify() ������ notify_all() ������������һ��������, wait() �������»�ȡ�������ء���Ҳ����ָ����ʱʱ�䡣
????????(����)notify()���������˵ȴ������������߳�֮һ,������κ��߳��ڵȴ��Ļ���notify_all()�������������еȴ������������̡߳�
????????ע��: notify() ������ notify_all() �����������ͷ���,����ζ�ű����ѵ��̲߳������������ǵ� wait() ���������з���,���ǻ��ڵ����� notify() ������ notify_all() �������߳����շ�������������Ȩ�ء�
????????ʹ�����������ĵ��ͱ�̷���ǽ�������ͬ��ijЩ����״̬��Ȩ��,��Щ��״̬��ijЩ�ض��ı����Ȥ���߳�,�����ظ����� wait() ����,ֱ�������������ĸı䷢��;��������״̬���߳�,���ǽ���ǰ״̬�ı�Ϊ�����ǵȴ������ڴ�����״̬��,���� notify() �������� notify_all() ����������,����Ĵ�����һ��ͨ�õ���������������������-����������:
# Consume one item
with cv:
while not an_item_is_available():
cv.wait()
get_an_available_item()
# Produce one item
with cv:
make_an_item_available()
cv.notify()
????????ʹ�� while ѭ�������Ҫ�����������������б�Ҫ��,��Ϊ wait() ��������Ҫ������ȷ�����ȵ�ʱ���Ż᷵��,����ʱ���� notify() �������õ��Ǹ����������Ѿ����ٳ��������Ƕ��̱߳�������е����⡣ wait_for() �������Զ����������,����ʱ���㡣
# Consume an item
with cv:
cv.wait_for(an_item_is_available)
get_an_available_item()
????????ѡ�� notify() ���� notify_all() ,ȡ����һ��״̬�ı���ֻ�ܱ�һ�������ܱ�����ȴ��߳����á�������һ�����͵�������-������������,����һ����Ŀ��������ֻ�軽��һ���������̡߳�
class threading.Condition(lock=None)
????????ʵ����������������ࡣһ������������������һ�������߳��ڱ������߳���֪֮ͨǰ���еȴ���
????????��������˷�None��lock����,��������ΪLock����RLock����,���������������ײ���������,���ᴴ���µ�RLock����,�����������ײ�����
????????�� 3.3 �����: �ӹ���������Ϊ�ࡣ
????????acquire(*args)
????????����ײ������˷������õײ�������Ӧ����,����ֵ�ǵײ�����Ӧ�����ķ���ֵ��
????????release()
????????�ͷŵײ������˷������õײ�������Ӧ������û�з���ֵ��
????????wait(timeout=None)
????????�ȴ�ֱ����֪ͨ������ʱ������߳��ڵ��ô˷���ʱû�л����,��������
RuntimeError�쳣��
????????��������ͷŵײ���,Ȼ������,ֱ��������һ���߳��е���ͬһ������������notify()��notify_all()������,����ֱ����ѡ�ij�ʱ������һ�������ѻ��߳�ʱ,�����»���������ء�
????????���ṩ��timeout�����Ҳ���Noneʱ,��Ӧ����һ��������,���������ij�ʱʱ��,����Ϊ��λ(����ΪС��)��
????????���ײ����Ǹ�RLock,����ʹ������release()�����ͷ���,��Ϊ�������ݹ��λ�ȡʱ,ʵ���Ͽ������������෴,ʹ����RLock����ڲ��ӿ�,��ʹ��εݹ��ȡ��Ҳ�ܽ������� Ȼ��,�����»�ȡ��ʱ,ʹ����һ���ڲ��ӿ����ָ��ݹ鼶��
????????����True,�����ṩ��timeout����,��������·���False��
????????�� 3.2 �����: ������,�������Ƿ��� None��
????????wait_for(predicate, timeout=None)
????????�ȴ�,ֱ����������Ϊ�档
predicateӦ����һ���ɵ��ö���������ķ���ֵ�ɱ�����Ϊһ������ֵ�������ṩtimeout�����������ȴ�ʱ�䡣
????????���ʵ�÷������ظ��ص���wait()ֱ�������ж�ʽ���߷�����ʱ������ֵ���ж�ʽ���һ������ֵ,�����������������ʱ�᷵��False��
????????���Գ�ʱ����,���ô˷��������൱�ڱ�д:
while not predicate():
cv.wait()
????????���,����ͬ��������
wait():�������ڱ�����ʱ���ֻ�ȡ,���ڷ���ʱ���»�ȡ�� ��������ִ���ж�ʽ��
????????3.2 �°湦��.
????????notify(n=1)
????????Ĭ�ϻ���һ���ȴ�����������̡߳���������߳���û�л����������µ����������,������
RuntimeError�쳣��
????????�������������� n �����ڵȴ���������������߳�;���û���߳��ڵȴ�,����һ���ղ�����
????????��ǰʵ����,��������� n ���߳����ڵȴ�,ȷ���� n ���̡߳��������������Ϊ������ȫ��δ��,�Ż���ʵ����ʱ�ỽ�ѳ��� n ���̡߳�
????????ע��:�����ѵ��̲߳�û�������ָ��������õ�
wait(),ֱ�����������»������ ��Ϊnotify()���ͷ���,������߲�Ӧ����������
????????notify_all()
????????�����������ڵȴ�����������̡߳����������Ϊ��
notify()����,������ֻ���ѵ�һ�߳�,���ǻ������еȴ��̡߳���������߳��ڵ����������ʱû�л����,������RuntimeError�쳣��
????????notifyAll�����Ǵ˷����������ñ�����
�ź�������
????????���Ǽ������ѧʷ������ϵ�ͬ��ԭ��֮һ,���ڵĺ�����ѧ�� Edsger W. Dijkstra ����������(��ʹ������ P() �� V() ������ acquire() �� release() )��
????????һ���ź�������һ���ڲ�������,�ü������� acquire() �����ĵ��ö��ݼ�,�� release() �����ĵ��ö������� ��������ֵ��Զ����С����;�� acquire() �������ּ�����Ϊ��ʱ,��������,ֱ�������̵߳��� release() ������
????????�ź�������Ҳ֧�� �����Ĺ���Э�� ��
class threading.Semaphore(value=1)
????????����ʵ���ź��������ź����������һ��ԭ���Եļ�����,����
release()�����ĵ��ô�����ȥacquire()�ĵ��ô����ټ���һ����ʼֵ�������Ҫ,acquire()������������ֱ�����Է��ض�����ʹ�ü�������ɸ�������û����ʽ����value��ֵʱ,Ĭ��Ϊ1��
????????��ѡ����value�����ڲ���������ʼֵ,Ĭ��ֵΪ 1 �����value������С��0��ֵ,��������ValueError�쳣��
????????�� 3.3 �����: �ӹ���������Ϊ�ࡣ
????????acquire(blocking=True, timeout=None)
????????��ȡһ���ź�����
????????�ڲ�������������µ���ʱ:
????????����ڽ���ʱ�ڲ���������ֵ������,�����һ����������True��
????????����ڽ���ʱ�ڲ���������ֵΪ��,������ֱ������release()�ĵ��û��ѡ� һ��������(���Ҽ�������ֵ���� 0),�������� 1 ������True�� ÿ�ζ�release()�ĵ��ý�ֻ����һ���̡߳� �̱߳����ѵĴ����Dz���ȷ���ġ�
????????(����)������ʱ��blocking����ΪFalse,�����������û�в����ĵ��û�����,��������False;����,����û�в����ĵ�����ͬ������,������True��
????????���������ʱ���timeout��ΪNone,�������������timeout�롣 �����ڴ�ʱ��ʱδ�ܳɹ���ɻ�ȡ����False�� ����������·���True��
????????�� 3.2 �����: �µ� timeout �βΡ�
????????release(n=1)
????????�ͷ�һ���ź���,���ڲ���������ֵ���� n�� ������ʱֵΪ�����������߳����ڵȴ����ٴα�Ϊ������ʱ,������ n ���̡߳�
????????�� 3.9 �����: ������ n �β���һ�����ͷŶ���ȴ��̡߳�
class threading.BoundedSemaphore(value=1)
????????����ʵ���н��ź������н��ź���ͨ�������ȷ������ǰ��ֵ���ᳬ����ʼֵ����������˳�ʼֵ,��������
ValueError�쳣���ڴ�������,�ź������ڱ�������������Դ������ź������ͷŵĴ�������,����������˴���û��ָ��ʱ,value��ֵĬ��Ϊ1��
????????�� 3.3 �����: �ӹ���������Ϊ�ࡣ
Semaphore ����
????????�ź���ͨ�����ڱ�������������Դ,�������ݿ������������Դ�����̶����κ������,��Ӧ��ʹ���н��ź������������κι����߳�ǰ,Ӧ�������߳��г�ʼ���ź�����
maxconnections = 5
# ...
pool_sema = BoundedSemaphore(value=maxconnections)
????????�����߳����ɺ�,����Ҫ���ӷ�����ʱ,��Щ�߳̽������ź����� acquire �� release ����:
with pool_sema:
conn = connectdb()
try:
# ... use connection ...
finally:
conn.close()
????????ʹ���н��ź����ܼ������ֱ�̴���:�ź������ͷŴ������������������
�¼�����
????????�����߳�֮��ͨ�ŵ������֮һ:һ���̷߳����¼��ź�,�������̵߳ȴ����źš�
????????һ���¼��������һ���ڲ���ʶ,���� set() �����ɽ�������Ϊ true ,���� clear() �����ɽ�������Ϊ false ,���� wait() ��������������ֱ����ʶΪ true ��
class threading.Event
????????ʵ���¼�������ࡣ�¼��������һ���ڲ���ʶ,����
set()�����ɽ�������Ϊtrue������clear()�����ɽ�������Ϊfalse������wait()��������������ֱ����ʶΪtrue�������ʶ��ʼʱΪfalse��
????????�� 3.3 �����: �ӹ���������Ϊ�ࡣ
????????is_set()
????????���ҽ����ڲ���ʶΪ
trueʱ����True��
????????isSet�����Ǵ˷����������ñ�����
????????set()
????????���ڲ���ʶ����Ϊ
true���������ڵȴ�����¼����߳̽������ѡ�����ʶΪtrueʱ,����wait()�������̲߳��ᱻ��������
????????clear()
????????���ڲ���ʶ����Ϊ
false��֮�����wait()�������߳̽��ᱻ����,ֱ������set()�������ڲ���ʶ�ٴ�����Ϊtrue��
????????wait(timeout=None)
????????�����߳�ֱ���ڲ�����Ϊ
true���������ʱ�ڲ���ʶΪtrue,���������ء����������߳�,ֱ������set()��������ʶ����Ϊtrue���߷�����ѡ�ij�ʱ��
????????���ṩ��timeout�����Ҳ���Noneʱ,��Ӧ����һ��������,���������ij�ʱʱ��,����Ϊ��λ(����ΪС��)��
????????���ҽ����ڲ�����ڵȴ�����֮ǰ���ߵȴ���ʼ֮����Ϊ��ֵʱ�˷���������True,Ҳ����˵,�������Ƿ���True�����趨�˳�ʱ�Ҳ��������˳�ʱ��
????????�� 3.1 �����: ������,�������Ƿ���
None��
��ʱ������
????????�����ʾһ������Ӧ���ڵȴ�һ����ʱ��֮������ �� �൱��һ����ʱ���� Timer ���� Thread �������,��˿�����һ���Զ����߳�һ��������
????????���߳�һ��,ͨ������ start() ����������ʱ������ cancel() ��������ֹͣ��ʱ��(�ڼ�ʱ����ǰ), ��ʱ����ִ�������֮ǰ�ȴ���ʱ�����������û�ָ����ʱ��������ȫ��ͬ��
????????����:
def hello():
print("hello, world")
t = Timer(30.0, hello)
t.start() # after 30 seconds, "hello, world" will be printed
class threading.Timer(interval, function, args=None, kwargs=None)
????????����һ����ʱ��,�ھ���
interval��ļ���¼���,�����ò���args�ؼ��ֲ���kwargs����function�����argsΪNone(Ĭ��ֵ),���ʹ��һ�����б������kwargsΪNone(Ĭ��ֵ),���ʹ��һ�����ֵ䡣
????????�� 3.3 �����: �ӹ���������Ϊ�ࡣ
????????cancel()
????????ֹͣ��ʱ����ȡ��ִ�м�ʱ����Ҫִ�еIJ�����������ʱ���Դ��ڵȴ�״̬ʱ��Ч��
դ������
????????3.2 �°湦��.
????????դ�����ṩһ����ͬ��ԭ��,����Ӧ�Թ̶��������߳���Ҫ�˴���ȴ���������̵߳��� wait() ����������,ֱ�������̶߳������� wait() ��������ʱ�����߳̽���ͬʱ�ͷš�
????????դ��������Ա����ʹ��,�����̵��������ܸı䡣
????????����һ��ʹ�ü��ķ���ʵ�ֿͻ��˽��������˽���ͬ��������:
b = Barrier(2, timeout=5)
def server():
start_server()
b.wait()
while True:
connection = accept_connection()
process_server_connection(connection)
def client():
b.wait()
while True:
connection = make_connection()
process_client_connection(connection)
class threading.Barrier(parties, action=None, timeout=None)
????????����һ����Ҫ
parties���̵߳�դ����������ṩ�˿ɵ��õ�action����,�����������̱߳��ͷ�ʱ������һ���߳����Զ����á�timeout��Ĭ�ϵij�ʱʱ��,���û����wait()������ָ����ʱʱ��Ļ���
????????wait(timeout=None)
????????���դ������դ���������̶߳��Ѿ��������������,���ǽ�ͬʱ���ͷš�����ṩ��
timeout����,�����timeout���������ڴ���դ������ʱ�ṩ��timeout������
????????��������ֵ��һ������,ȡֵ��Χ��0��parties�C 1,��ÿ���߳��еķ���ֵ����ͬ�������ڴ������߳���ѡ��Ψһ��һ���߳�ִ��һЩ�ر�Ĺ���������:
i = barrier.wait()
if i == 0:
# Only one thread needs to print this
print("passed the barrier")
????????�������դ������ʱ�ڹ��캯�����ṩ��
action����,����������һ���߳��ͷ�ǰ�����á�����˵����������쳣,դ����������̬��
????????��������˳�ʱ,դ������������̬��
????????���դ�������������̬,������դ��ʱ�����̵߳ȴ��ͷ�,��������BrokenBarrierError�쳣��
????????reset()
????????����դ��ΪĬ�ϵij�ʼ̬�����դ���������̵߳ȴ��ͷ�,��Щ�߳̽����յ�
BrokenBarrierError�쳣��
????????��ע��ʹ�ô˺���ʱ,�������״̬δ֪�������߳�,�������Ҫִ���ⲿͬ���� ���դ����������ý���������½�һ����
????????abort()
????????ʹդ��������״̬�� �⽫�����κ����к�δ���� wait() �ĵ���ʧ�ܲ�����
BrokenBarrierError�� �����������Ҫ��ֹij���߳�ʱʹ�ô˷���,�Ա���Ӧ�ó����������
????????���õķ�ʽ��:����դ��ʱ�ṩһ�������ij�ʱʱ��,���Զ�����ij���̳߳�����
????????parties
????????���դ������Ҫ���߳�������
????????n_waiting
????????��ǰʱ������դ�����������߳�������
????????broken
????????һ������ֵ,ֵΪ
True����դ��Ϊ����̬��
exception threading.BrokenBarrierError
????????�쳣��,��
RuntimeError�쳣������,��Barrier��������ʱ�����߳�����ʱ�Ͷ����������̬ʱ��������
�� with �����ʹ�������������ź���
????????���ģ���ṩ�Ĵ��� acquire() �� release() �����Ķ���,���Ա����� with ���������Ĺ�����������������ʱ acquire() �����ᱻ����,�˳�����ʱ release() �ᱻ���á����,����Ƭ��:
with some_lock:
# do something...
????????�൱��:
some_lock.acquire()
try:
# do something...
finally:
some_lock.release()
????????���� Lock �� RLock �� Condition �� Semaphore �� BoundedSemaphore ����������� with ����������������
����
????????��_thread��������Ϊthreading�İ汾:
nano threading_test.py
#!/usr/bin/python3
import threading
import time
M = 3
tickets = 20
lock = threading.Lock()
def fun(ID):
global tickets
global lock
while True:
lock.acquire() # ����
if tickets > 0:
time.sleep((ID + 1)/10)
tickets -= 1
print("(Thread %d)the remaining tickets:%d" %(ID + 1, tickets))
lock.release() # ����
if not tickets > 0:
return
for _ in range(M):
threading.Thread(target=fun, args=(_,), daemon = True).start()
while threading.active_count() > 1:
pass
python3 ./threading_test.py
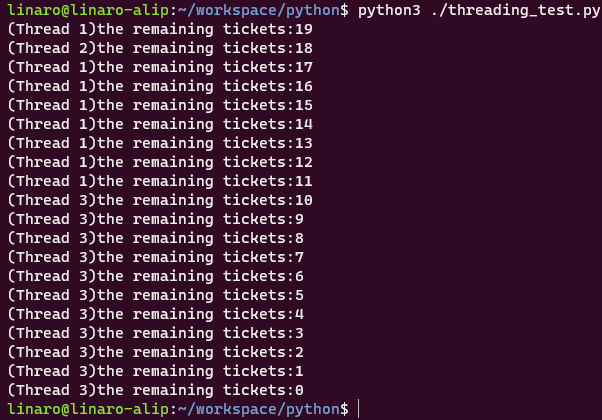
????????�������ֵ�ʾ����Python3���߳�threading����(ת��)
���²�������ժ��C++ ���߳� | ����̳�
g++ -std=c++11 test.cpp
C++
�ο�����:C++ std::thread | ����̳�
????????C++ 11 ֮���������µı��߳̿� std::thread,std::thread �� <thread> ͷ�ļ�������,���ʹ�� std::thread ʱ��Ҫ���� �� <thread> ͷ�ļ���
????????֮ǰһЩ������ʹ�� C++ 11 �ı�������� -std=c++11:
std::thread
std::thread ���캯��
/* Ĭ�Ϲ��캯�� */
thread() noexcept;
/* ��ʼ�����캯�� */
template <class Fn, class... Args>
explicit thread(Fn&& fn, Args&&... args);
/* �������캯�� [deleted] */
thread(const thread&) = delete;
/* Move ���캯�� */
thread(thread&& x) noexcept;
????????Ĭ�Ϲ��캯��,����һ���յ� std::thread ִ�ж���
????????��ʼ�����캯��,����һ�� std::thread ����,�� std::thread ����ɱ� joinable,�²������̻߳���� fn ����,�ú����IJ����� args ������
????????�������캯��(������),��ζ�� std::thread ���ɿ������졣
????????Move ���캯��,move ���캯��(move ������ C++11 �³��ֵĸ���),���óɹ�֮�� x �������κ� std::thread ִ�ж���
????????std::thread ���ֹ��캯����������:
#include <iostream>
#include <utility>
#include <thread>
#include <chrono>
#include <functional>
#include <atomic>
void f1(int n)
{
for (int i = 0; i < 5; ++i) {
std::cout << "Thread " << n << " executing\n";
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
}
void f2(int& n)
{
for (int i = 0; i < 5; ++i) {
std::cout << "Thread 2 executing\n";
++n;
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
}
int main()
{
int n = 0;
std::thread t1; // t1 is not a thread
std::thread t2(f1, n + 1); // pass by value
std::thread t3(f2, std::ref(n)); // pass by reference
std::thread t4(std::move(t3)); // t4 is now running f2(). t3 is no longer a thread
t2.join();
t4.join();
std::cout << "Final value of n is " << n << '\n';
}
std::thread ��ֵ����
/* Move ��ֵ���� */
thread& operator=(thread&& rhs) noexcept;
/* ������ֵ���� [deleted] */
thread& operator=(const thread&) = delete;
????????(1) Move ��ֵ����,�����ǰ���� joinable,��Ҫ����һ����ֵ����(rhs)�� move ��ֵ����;�����ǰ����ɱ� joinable,������ terminate() ������
????????(2) ������ֵ����,������,��� std::thread ���ɿ�����ֵ��
????????�뿴���������:
#include <stdio.h>
#include <stdlib.h>
#include <chrono> // std::chrono::seconds
#include <iostream> // std::cout
#include <thread> // std::thread, std::this_thread::sleep_for
void thread_task(int n) {
std::this_thread::sleep_for(std::chrono::seconds(n));
std::cout << "hello thread "
<< std::this_thread::get_id()
<< " paused " << n << " seconds" << std::endl;
}
int main(int argc, const char *argv[])
{
std::thread threads[5];
std::cout << "Spawning 5 threads...\n";
for (int i = 0; i < 5; i++) {
threads[i] = std::thread(thread_task, i + 1);
}
std::cout << "Done spawning threads! Now wait for them to join\n";
for (auto& t: threads) {
t.join();
}
std::cout << "All threads joined.\n";
return EXIT_SUCCESS;
}
������Ա����
get_id
????????��ȡ�߳� ID,����һ������Ϊ std::thread::id �Ķ����뿴��������:
#include <iostream>
#include <thread>
#include <chrono>
void foo()
{
std::this_thread::sleep_for(std::chrono::seconds(1));
}
int main()
{
std::thread t1(foo);
std::thread::id t1_id = t1.get_id();
std::thread t2(foo);
std::thread::id t2_id = t2.get_id();
std::cout << "t1's id: " << t1_id << '\n';
std::cout << "t2's id: " << t2_id << '\n';
t1.join();
t2.join();
}
joinable
????????����߳��Ƿ�ɱ� join����鵱ǰ���̶߳����Ƿ��ʾ��һ�����ִ���߳�,��Ĭ�Ϲ��캯���������߳��Dz��ܱ�join�ġ�����,���ij���߳��Ѿ�ִ��������,����û�б�join�Ļ�,���߳���Ȼ�ᱻ��Ϊ��һ�����ִ���߳�,���Ҳ�ǿ��Ա�join�ġ�
#include <iostream>
#include <thread>
#include <chrono>
void foo()
{
std::this_thread::sleep_for(std::chrono::seconds(1));
}
int main()
{
std::thread t;
std::cout << "before starting, joinable: " << t.joinable() << '\n';
t = std::thread(foo);
std::cout << "after starting, joinable: " << t.joinable() << '\n';
t.join();
}
join
????????join �߳�,���øú�����������ǰ�߳�,ֱ���� *this ����ʾ���߳�ִ����� join �ŷ��ء�
#include <iostream>
#include <thread>
#include <chrono>
void foo()
{
// simulate expensive operation
std::this_thread::sleep_for(std::chrono::seconds(1));
}
void bar()
{
// simulate expensive operation
std::this_thread::sleep_for(std::chrono::seconds(1));
}
int main()
{
std::cout << "starting first helper...\n";
std::thread helper1(foo);
std::cout << "starting second helper...\n";
std::thread helper2(bar);
std::cout << "waiting for helpers to finish..." << std::endl;
helper1.join();
helper2.join();
std::cout << "done!\n";
}
detach
????????detach �̡߳� ����ǰ�̶߳�����������ִ��ʵ������̶߳������,ʹ���̵߳�ִ�п��Ե������С�һ���߳�ִ�����,�����������Դ���ᱻ�ͷš�
????????���� detach ����֮��:
????????????????*this ���ٴ����κε��߳�ִ��ʵ����
????????????????joinable() == false
????????????????get_id() == std::thread::id()
????????����,����������� joinable() == false,����׳� std::system_error��
#include <iostream>
#include <chrono>
#include <thread>
void independentThread()
{
std::cout << "Starting concurrent thread.\n";
std::this_thread::sleep_for(std::chrono::seconds(2));
std::cout << "Exiting concurrent thread.\n";
}
void threadCaller()
{
std::cout << "Starting thread caller.\n";
std::thread t(independentThread);
t.detach();
std::this_thread::sleep_for(std::chrono::seconds(1));
std::cout << "Exiting thread caller.\n";
}
int main()
{
threadCaller();
std::this_thread::sleep_for(std::chrono::seconds(5));
}
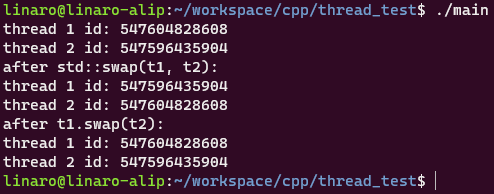
swap
????????swap �߳�,���������̶߳����������ĵײ���(underlying handles)��
#include <iostream>
#include <thread>
#include <chrono>
void foo()
{
std::this_thread::sleep_for(std::chrono::seconds(1));
}
void bar()
{
std::this_thread::sleep_for(std::chrono::seconds(1));
}
int main()
{
std::thread t1(foo);
std::thread t2(bar);
std::cout << "thread 1 id: " << t1.get_id() << std::endl;
std::cout << "thread 2 id: " << t2.get_id() << std::endl;
std::swap(t1, t2);
std::cout << "after std::swap(t1, t2):" << std::endl;
std::cout << "thread 1 id: " << t1.get_id() << std::endl;
std::cout << "thread 2 id: " << t2.get_id() << std::endl;
t1.swap(t2);
std::cout << "after t1.swap(t2):" << std::endl;
std::cout << "thread 1 id: " << t1.get_id() << std::endl;
std::cout << "thread 2 id: " << t2.get_id() << std::endl;
t1.join();
t2.join();
}
????????ִ�н������:
native_handle
????????���� native handle(���� std::thread ��ʵ�ֺͲ���ϵͳ���,��˸ú��������� std::thread ����ʵ����ص��߳̾��,�����ڷ��� Posix ����ƽ̨��(�� Unix/Linux)�� Pthread ��)��
#include <thread>
#include <iostream>
#include <chrono>
#include <cstring>
#include <mutex>
std::mutex iomutex;
void f(int num)
{
std::this_thread::sleep_for(std::chrono::seconds(1));
sched_param sch;
int policy;
pthread_getschedparam(pthread_self(), &policy, &sch);
std::lock_guard<std::mutex> lk(iomutex);
std::cout << "Thread " << num << " is executing at priority "
<< sch.sched_priority << '\n';
}
int main()
{
std::thread t1(f, 1), t2(f, 2);
sched_param sch;
int policy;
pthread_getschedparam(t1.native_handle(), &policy, &sch);
sch.sched_priority = 20;
if(pthread_setschedparam(t1.native_handle(), SCHED_FIFO, &sch)) {
std::cout << "Failed to setschedparam: " << std::strerror(errno) << '\n';
}
t1.join();
t2.join();
}
????????ִ�н��:
????????����̳�˵�Ľ��Ϊ
Thread 2 is executing at priority 0
Thread 1 is executing at priority 20
????????��wsl2 ubuntu 18.04 LTS��ʵ��Ľ��Ϊ

????????��RK3399 Pro��Debianϵͳ��ʵ��Ľ��Ϊ

????????�ź���
hardware_concurrency [static]
????????���Ӳ����������,���ص�ǰƽ̨���߳�ʵ����֧�ֵ��̲߳�����Ŀ,������ֵ����ֻ��Ϊϵͳ��ʾ(hint)��
#include <iostream>
#include <thread>
int main() {
unsigned int n = std::thread::hardware_concurrency();
std::cout << n << " concurrent threads are supported.\n";
}
std::this_thread �����ռ�����ظ�����������
get_id
????????��ȡ�߳� ID��
#include <iostream>
#include <thread>
#include <chrono>
#include <mutex>
std::mutex g_display_mutex;
void foo()
{
std::thread::id this_id = std::this_thread::get_id();
g_display_mutex.lock();
std::cout << "thread " << this_id << " sleeping...\n";
g_display_mutex.unlock();
std::this_thread::sleep_for(std::chrono::seconds(1));
}
int main()
{
std::thread t1(foo);
std::thread t2(foo);
t1.join();
t2.join();
}
yield
????????��ǰ�̷߳���ִ��,����ϵͳ������һ�̼߳���ִ�С�
#include <iostream>
#include <chrono>
#include <thread>
// "busy sleep" while suggesting that other threads run
// for a small amount of time
void little_sleep(std::chrono::microseconds us)
{
auto start = std::chrono::high_resolution_clock::now();
auto end = start + us;
do {
std::this_thread::yield();
} while (std::chrono::high_resolution_clock::now() < end);
}
int main()
{
auto start = std::chrono::high_resolution_clock::now();
little_sleep(std::chrono::microseconds(100));
auto elapsed = std::chrono::high_resolution_clock::now() - start;
std::cout << "waited for "
<< std::chrono::duration_cast<std::chrono::microseconds>(elapsed).count()
<< " microseconds\n";
}
sleep_until
????????�߳�������ij��ָ����ʱ��(time point),���̲߳ű����»��ѡ�
template< class Clock, class Duration >
void sleep_until( const std::chrono::time_point<Clock,Duration>& sleep_time );
sleep_for
????????�߳�����ij��ָ����ʱ��Ƭ(time span),���̲߳ű����»���,���������̵߳��ȵ�ԭ��,ʵ������ʱ����ܱ� sleep_duration ����ʾ��ʱ��Ƭ������
#include <iostream>
#include <chrono>
#include <thread>
int main()
{
std::cout << "Hello waiter" << std::endl;
std::chrono::milliseconds dura( 2000 );
std::this_thread::sleep_for( dura );
std::cout << "Waited 2000 ms\n";
}
????????ִ�н������:

std::mutex
�ο�����:C++11 ����ָ����(std::mutex ���) ���� Haippy
????????Mutex �ֳƻ�����,C++ 11���� Mutex ��ص���(����������)�ͺ����������� <mutex> ͷ�ļ���,�����������Ҫʹ�� std::mutex,�ͱ������ <mutex> ͷ�ļ���
????????std::mutex ��C++11 ��������Ļ�����,std::mutex �����ṩ�˶�ռ����Ȩ�����ԡ�������֧�ֵݹ�ض� std::mutex ��������,�� std::recursive_lock ����Եݹ�ضԻ���������������
Mutex ϵ����(����)
std::mutex,������� Mutex �ࡣ
std::recursive_mutex,�ݹ� Mutex �ࡣ
std::time_mutex,��ʱ Mutex �ࡣ
std::recursive_timed_mutex,��ʱ�ݹ� Mutex �ࡣ
Lock ��(����)
std::lock_guard,�� Mutex RAII ���,�����̶߳Ի�����������
std::unique_lock,�� Mutex RAII ���,�����̶߳Ի���������,���ṩ�˸��õ������ͽ������ơ�
��������
std::once_flag
std::adopt_lock_t
std::defer_lock_t
std::try_to_lock_t
����
std::try_lock,����ͬʱ�Զ��������������
std::lock,����ͬʱ�Զ��������������
std::call_once,�������߳���Ҫͬʱ����ij������,call_once ���Ա�֤����̶߳Ըú���ֻ����һ�Ρ�
std::mutex �ij�Ա����
????????���캯��,std::mutex��������������,Ҳ������ move ����,��������� mutex �����Ǵ��� unlocked ״̬�ġ�
????????lock(),�����߳̽���ס�û��������̵߳��øú����ᷢ������ 3 �����:
????????????????(1). ����û�������ǰû�б���ס,������߳̽��û�������ס,ֱ������ unlock֮ǰ,���߳�һֱӵ�и�����
????????????????(2). �����ǰ�������������߳���ס,��ǰ�ĵ����̱߳�����ס��
????????????????(3). �����ǰ����������ǰ�����߳���ס,����������(deadlock)��
????????unlock(), ����,�ͷŶԻ�����������Ȩ��
????????try_lock(),������ס������,����������������߳�ռ��,��ǰ�߳�Ҳ���ᱻ�������̵߳��øú���Ҳ��������� 3 �����,
????????????????(1). �����ǰ������û�б������߳�ռ��,����߳���ס������,ֱ�����̵߳��� unlock �ͷŻ�������
????????????????(2). �����ǰ�������������߳���ס,��ǰ�����̷߳��� false,�������ᱻ��������
????????????????(3). �����ǰ����������ǰ�����߳���ס,����������(deadlock)��
????????�������һ���� std::mutex ��С����:
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex
volatile int counter(0); // non-atomic counter
std::mutex mtx; // locks access to counter
void attempt_10k_increases()
{
for (int i = 0; i < 10000; ++i)
{
if (mtx.try_lock())
{ // only increase if currently not locked:
++counter;
mtx.unlock();
}
}
}
int main(int argc, const char *argv[])
{
std::thread threads[10];
for (int i = 0; i < 10; ++i)
threads[i] = std::thread(attempt_10k_increases);
for (auto &th : threads)
th.join();
std::cout << counter << " successful increases of the counter.\n";
return 0;
}
std::recursive_mutex ����
????????std::recursive_mutex �� std::mutex һ��,Ҳ��һ�ֿ��Ա������Ķ���,���Ǻ� std::mutex ��ͬ����,std::recursive_mutex ����ͬһ���̶߳Ի������������(���ݹ�����),����öԻ���������Ķ������Ȩ,std::recursive_mutex �ͷŻ�����ʱ��Ҫ�����������������ͬ������ unlock(),������Ϊ lock() ������ unlock() ������ͬ,����֮��,std::recursive_mutex �����Ժ� std::mutex ������ͬ��
std::time_mutex ����
????????std::time_mutex �� std::mutex ����������Ա����,try_lock_for(),try_lock_until()��
????????try_lock_for ��������һ��ʱ�䷶Χ,��ʾ����һ��ʱ�䷶Χ֮���߳����û�л����������ס(�� std::mutex �� try_lock() ��ͬ,try_lock ���������ʱû�л������ֱ�ӷ��� false),����ڴ��ڼ������߳��ͷ�����,����߳̿��Ի�öԻ���������,�����ʱ(����ָ��ʱ���ڻ���û�л����),�� false��
????????try_lock_until ���������һ��ʱ�����Ϊ����,��ָ��ʱ���δ����֮ǰ�߳����û�л����������ס,����ڴ��ڼ������߳��ͷ�����,����߳̿��Ի�öԻ���������,�����ʱ(����ָ��ʱ���ڻ���û�л����),�� false��
????????�����С����˵���� std::time_mutex ���÷�:
#include <iostream> // std::cout
#include <chrono> // std::chrono::milliseconds
#include <thread> // std::thread
#include <mutex> // std::timed_mutex
std::timed_mutex mtx;
void fireworks()
{
// waiting to get a lock: each thread prints "-" every 200ms:
while (!mtx.try_lock_for(std::chrono::milliseconds(200)))
{
std::cout << "-";
}
// got a lock! - wait for 1s, then this thread prints "*"
std::this_thread::sleep_for(std::chrono::milliseconds(1000));
std::cout << "*\n";
mtx.unlock();
}
int main()
{
std::thread threads[10];
// spawn 10 threads:
for (int i = 0; i < 10; ++i)
threads[i] = std::thread(fireworks);
for (auto &th : threads)
th.join();
return 0;
}
std::recursive_timed_mutex ����
????????�� std:recursive_mutex �� std::mutex �Ĺ�ϵһ��,std::recursive_timed_mutex ������Ҳ���Դ� std::timed_mutex �Ƶ�������
std::lock_guard ����
????????�� Mutex RAII ���,�����̶߳Ի�����������
????????����:
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex, std::lock_guard
#include <stdexcept> // std::logic_error
std::mutex mtx;
void print_even(int x)
{
if (x % 2 == 0)
std::cout << x << " is even\n";
else
throw(std::logic_error("not even"));
}
void print_thread_id(int id)
{
try
{
// using a local lock_guard to lock mtx guarantees unlocking on destruction / exception:
std::lock_guard<std::mutex> lck(mtx);
print_even(id);
}
catch (std::logic_error &)
{
std::cout << "[exception caught]\n";
}
}
int main()
{
std::thread threads[10];
// spawn 10 threads:
for (int i = 0; i < 10; ++i)
threads[i] = std::thread(print_thread_id, i + 1);
for (auto &th : threads)
th.join();
return 0;
}
std::unique_lock ����
????????�� Mutex RAII ���,�����̶߳Ի���������,���ṩ�˸��õ������ͽ������ơ�
????????����:
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex, std::unique_lock
std::mutex mtx; // mutex for critical section
void print_block(int n, char c)
{
// critical section (exclusive access to std::cout signaled by lifetime of lck):
std::unique_lock<std::mutex> lck(mtx);
for (int i = 0; i < n; ++i)
{
std::cout << c;
}
std::cout << '\n';
}
int main()
{
std::thread th1(print_block, 50, '*');
std::thread th2(print_block, 50, '$');
th1.join();
th2.join();
return 0;
}
std::try_lock
template <class Mutex1, class Mutex2, class... Mutexes>
int try_lock (Mutex1& a, Mutex2& b, Mutexes&... cde);
????????������������������(����)
????????����ʹ��try_lock��Ա��������������Ϊ�������ݵĶ���(������)��
????????�ú���Ϊÿ����������try_lock��Ա����(������a,Ȼ����b,�����cde�е���������,˳����ͬ),ֱ�����е��ö��ɹ�,����һ������һ������ʧ��(Ҫô����false,Ҫô�׳�һ���쳣)��
????????������������ʧ�ܶ�����,������е���try_lock�ɹ��Ķ������unlock,���Ҹú�����������ʧ�ܵĶ���IJ���˳��š����ڲ����б��е��������,���ٽ��н�һ���ĵ��á�
����
a, b, cde
????????Ҫ���������Ķ���
????????Mutex1��Mutex2��MutexesӦ�ǿ������͡�
����ֵ
????????����ú����ɹ������������еĶ���,������-1��
????????����,�ú�������δ�ܱ������Ķ��������(0����a,1����b,��)��
����
// std::lock example
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex, std::try_lock
std::mutex foo, bar;
void task_a()
{
foo.lock();
std::cout << "task a\n";
bar.lock();
// ...
foo.unlock();
bar.unlock();
}
void task_b()
{
int x = try_lock(bar, foo);
if (x == -1)
{
std::cout << "task b\n";
// ...
bar.unlock();
foo.unlock();
}
else
{
std::cout << "[task b failed: mutex " << (x ? "foo" : "bar") << " locked]\n";
}
}
int main()
{
std::thread th1(task_a);
std::thread th2(task_b);
th1.join();
th2.join();
return 0;
}
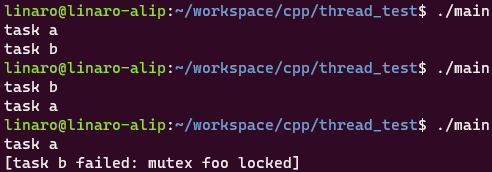
????????���ܵĽ��
task a
[task b failed: mutex foo locked]
????????(����)���������ܱ�������task_b��,��������������������һ��˳��ɹ�(�ı�������ʧ��ʱ���ֻ��)��
std::lock
template <class Mutex1, class Mutex2, class... Mutexes>
void lock (Mutex1& a, Mutex2& b, Mutexes&... cde);
????????��������������(����)
????????����������Ϊ�������ݵĶ���,��Ҫʱ���������̡߳�
????????�ú���ͨ�������Աlock��try_lock��unlock�ķ�ָ�����еĵ�����������Щ����,ȷ�����в����ڷ���ʱ������(�������κ�����)��
????????������������������еĶ���(������Ϊ����һ���ڲ������׳���һ���쳣),��ʧ��֮ǰ,�������Ƚ������ɹ����������ж���(����еĻ�)��
����
a, b, cde
????????Ҫ�����Ķ���
????????Mutex1��Mutex2��MutexesӦ�ǿ����������͡�
����
// std::lock example
#include <iostream> // std::cout
#include <thread> // std::thread
#include <mutex> // std::mutex, std::lock
std::mutex foo, bar;
void task_a()
{
// foo.lock(); bar.lock(); // replaced by:
std::lock(foo, bar);
std::cout << "task a\n";
foo.unlock();
bar.unlock();
}
void task_b()
{
// bar.lock(); foo.lock(); // replaced by:
std::lock(bar, foo);
std::cout << "task b\n";
bar.unlock();
foo.unlock();
}
int main()
{
std::thread th1(task_a);
std::thread th2(task_b);
th1.join();
th2.join();
return 0;
}
????????(����)��ע��,��ͨ������std::lock�滻������֮ǰ,���task_a������foo,��task_b������bar,���߶�����õڶ�����,����������
????????���ܵ����(�е�˳����ܲ�ͬ)��
task a
task b
std::call_once
template <class Fn, class... Args>
void call_once (once_flag& flag, Fn&& fn, Args&&... args);
????????����һ�κ���(����)
????????���ò���Ϊargs��fn,������һ���߳��Ѿ�ִ����(������ִ��)������ͬ��־�Ķ�call_once�ĵ��á�
????????�����һ���߳��Ѿ�������ִ��һ��������ͬ��־�Ķ�call_once�ĵ���,��ᵼ�±���ִ�С�����ִ�в�����fn,��������,ֱ������ִ�б�������,�������пɼ��ĸ���������һ���������в����������������ͬ��־�ĺ�������ͬ���ġ�
????????�����call_once�������������׳��쳣����(���쳣�ᱻ������������߳�),���Ҵ��ڱ���ִ��,�������Щ����ִ����ѡ��һ��,����������Ϊ�µ��������á�
????????��ע��,һ��һ������ִ�з���,���е�ǰ�ı���ִ�к�δ����call_once�ĵ���(������ͬ�ı�־)Ҳ�᷵��,�������Ϊ����ִ�С�
????????����ִ��ʹ��fn��args��lvalue��rvalue���õ�˥������,����fn���ص�ֵ��
����
flag
????????�����������ٵ���״̬�Ķ���
????????�ڲ�ͬ���߳���ʹ����ͬ�Ķ�����е���,���ͬʱ����,������һ����һ�ĵ��á�
????????(C++11)���flag��һ����Ч��״̬,�������׳�һ������invalid_argument����������system_error�쳣��
????????call_once����ͷ�ļ�<mutex>�ж�����ض�����,����Ϊ�ú����IJ���ʹ�á�
fn
????????ָ������ָ��,ָ���Ա��ָ��,�����κ�һ�ֿ��ƶ��ĺ�������(�����������operator()�Ķ���,�����հ��ͺ�������)��
????????����ֵ(����еĻ�)�����ԡ�
args...
????????���ݸ�����fn�IJ��������ǵ�����Ӧ�ǿ��ƶ��Ľṹ��
????????���fn��һ����Աָ��,��һ������Ӧ��һ�������˸ó�Ա�Ķ���(��һ������,��һ��ָ������ָ��)��
����
// call_once example
#include <iostream> // std::cout
#include <thread> // std::thread, std::this_thread::sleep_for
#include <chrono> // std::chrono::milliseconds
#include <mutex> // std::call_once, std::once_flag
int winner;
void set_winner(int x) { winner = x; }
std::once_flag winner_flag;
void wait_1000ms(int id)
{
// count to 1000, waiting 1ms between increments:
for (int i = 0; i < 1000; ++i)
std::this_thread::sleep_for(std::chrono::milliseconds(1));
// claim to be the winner (only the first such call is executed):
std::call_once(winner_flag, set_winner, id);
}
int main()
{
std::thread threads[10];
// spawn 10 threads:
for (int i = 0; i < 10; ++i)
threads[i] = std::thread(wait_1000ms, i + 1);
std::cout << "waiting for the first among 10 threads to count 1000 ms...\n";
for (auto &th : threads)
th.join();
std::cout << "winner thread: " << winner << '\n';
return 0;
}
���ܵ����(winner���ܻ�������ͬ)

����
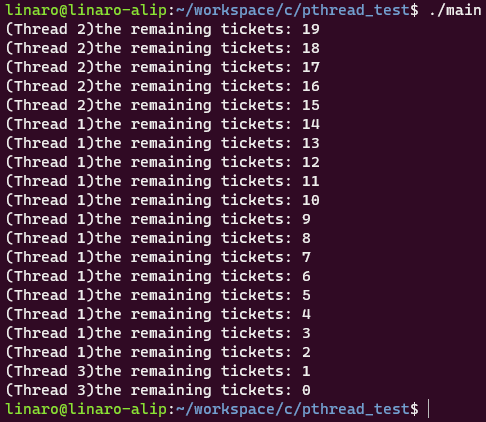
????????��֮ǰ��ʵ����ΪC++�汾:
nano main.cpp
#include <iostream> // std::cout
#include <thread> // std::thread, std::this_thread::sleep_for
#include <chrono> // std::chrono::milliseconds
#include <mutex> // std::call_once, std::once_flag
static int tickets = 20;
std::mutex mtx;
void fun(int id)
{
while (1)
{
mtx.lock();
if (tickets > 0)
{
std::this_thread::sleep_for(std::chrono::milliseconds(id * 100));
--tickets;
std::cout << "(Thread " << id << ")the remaining tickets: " << tickets << std::endl;
}
mtx.unlock();
if (tickets == 0)
break;
}
}
int main(int argc, char *argv[])
{
std::thread threads[3];
for (int i = 0; i < 3; ++i)
{
threads[i] = std::thread(fun, i + 1);
}
for (auto &t : threads)
{
t.join();
}
return 0;
}
nano Makefile
main: main.o
g++ -o main main.o -lpthread -std=c++11
main.o: main.cpp
g++ -c main.cpp
.PHONY:clear
clear:
rm *.o
rm main
make
./main
C����
�����:
pthread���ʹ�� ���� sherlock_lin
��C++����pthread��C++ POSIX Thread �߳�ͬ������API���� ���� ����֮��
�߳��Լ�pthread���ʹ�� ���� �ɲ�
pthreadѧϰ�ʼ�(��)�Cpthread����API������ ���� hitrose27
pthreadѧϰ�ʼ�(��)�C����֮��֮Posix�̱߳��ָ��(1) ���� hitrose27
????????�����ֲ�İ�װ:
sudo apt-get install manpages-posix-dev
ͷ�ļ�
????????ʹ�� pthread ��Ҫ����ͷ�ļ�,�����ӿ� -lpthread
#include <pthread.h>
????????һЩ���ú�������:
�߳�
�����߳�
int pthread_create(pthread_t *restrict thread,
const pthread_attr_t *restrict attr,
void *(*start_routine)(void*), void *restrict arg);
????????����
????????????????thread :thread ��һ��ָ���̱߳�ʶ����ָ��,�̵߳��ú�,��ֵ������Ϊ�߳�ID
typedef unsigned long int pthread_t;
????????????????attr :һ�����������Զ���,���Ա����������߳����ԡ�������ָ���߳����Զ���,Ҳ����ʹ��Ĭ��ֵ NULL��
????????????????start_routine: ���̺߳�������ʵ��ַ,���̺߳�����,�̴߳����ɹ���,thread ָ����ڴ浥Ԫ�Ӹõ�ַ��ʼ����
????????????????arg :���к����IJ�����������ͨ����������Ϊָ��ǿ��ת��Ϊ void ���ͽ��д��ݡ����û�д��ݲ���,��ʹ�� NULL��
????????????????����ֵ:���̴߳����ɹ�,��0,ʧ���ش�����,���� thread ������δ����ġ�
pthread_t pthread_self(void);
????????��ȡ��ǰ�̵߳�id
????????����
????????????????thread ���̱߳�ʾ��
int pthread_equal(pthread_t t1, pthread_t t2);
????????����
????????????????thread ���̱߳�ʾ��
????????�Ƚ������߳� ID �Ƿ����,�� Linux ϵͳ�� pthread_t �����Ϊ unsigned long ����,���Կ���ֱ���� == �б��Ƿ����,�������ijЩϵͳ���Ϊ�ṹ������,��ô�Ϳ���ͨ�� pthread_equal �����б��Ƿ�����ˡ�
ȡ���߳�
????????һ�������,�߳��������庯���˳���ʱ����Զ���ֹ ,��ͬʱҲ������Ϊ���յ���һ���̷߳�������ֹ(ȡ��)�����ǿ����ֹ ��
????????�߳�ȡ���ķ�������Ŀ���̷߳�Cancel�ź�,����δ���Cancel�ź�����Ŀ���߳��Լ����� ,�������ԡ�����������ֹ��������������Cancelation-point(ȡ����) ,�ɲ�ͬ��Cancelation״̬���� ��
????????�߳̽��յ�CANCEL�źŵ�ȱʡ���� (��pthread_create()�����̵߳�ȱʡ״̬)������������ȡ���� ,Ҳ����˵����һ��CANCELED״̬,�̼߳�������,ֻ��������Cancelation-point��ʱ��Ż��˳���
????????ȡ����
????????����POSIX��,pthread_join()��pthread_testcancel()�� pthread_cond_wait()��pthread_cond_timedwait()��sem_wait()��sigwait()�Ⱥ����Լ� read()��write()��������������ϵͳ���ö���Cancelation-point,������pthread��������������Cancelation����������pthread_cancel���ֲ�ҳ����,����Linux Thread����C���ϵò���,���ĿǰC�⺯��������Cancelation-point;��CANCEL�źŻ�ʹ�߳���������ϵͳ�������˳�,����EINTR������ ,�����������Ҫ��ΪCancelation-point��ϵͳ����ǰ�����pthread_testcancel(),�Ӷ��ﵽPOSIX����Ҫ���Ŀ�� ,�����´����:
pthread_testcancel();
retcode = read(fd, buffer, length);
pthread_testcancel();
????????pthread_testcancel�����������:
//terminate the thread as per pthread_exit(PTHREAD_CANCELED) if
//it has been canceled
extern void pthread_testcancel(void);
????????������Ĵ���˵�����п��Կ������ﵽ��ȡ�����ʱ��,Ϊ�˽����c�⺯����ϲ��õ�����,ʹ��pthread_testcancel()����ִ���˳��IJ���(��PTHREAD_CANCELED��λʱ,�����pthread_exit����)��
????????����̴߳�������ѭ����,��ѭ������û��ִ����ȡ����ı�Ȼ·�� ,���߳������ⲿ�����̵߳�ȡ���������ֹ�������������ѭ����ıؾ�·����Ӧ�ü���pthread_testcancel()���� (�ž������������)��
????????���߳�ȡ����ص�pthread����
ȡ���̵߳�ִ��
int pthread_cancel(pthread_t thread);
????????pthread_cancel()����������ȡ�����̡߳�Ŀ���̵߳�ȡ��״̬�����;�����ȡ����ʱ��Ч����ִ��ȡ������ʱ,�������̵߳�ȡ�����������������һ��ȡ��������������ʱ,�߳��ض����������������������á������һ��������������ʱ,�߳̽�����ֹ��
????????���ڴ�pthread_cancel()���صĵ����߳���˵,Ŀ���߳��е�ȡ������Ӧ���첽��ʽ���С�
���ñ��̶߳�Cancel�źŵķ�Ӧ
int pthread_setcancelstate(int state, int *oldstate);
????????state������ֵ:PTHREAD_CANCEL_ENABLE(ȱʡ)�� PTHREAD_CANCEL_DISABLE,�ֱ��ʾ�յ��źź���ΪCANCLED״̬�ͺ���CANCEL�źż������� ;old_state�����Ϊ NULL�����ԭ����Cancel״̬�Ա�ָ� ��
????????(һ��ĺ������ԭ������ֵ��ʾ����ִ�е�״̬,��������Ľ�����ɲ����б�����)
���ñ��߳�ȡ��������ִ��ʱ��
int pthread_setcanceltype(int type, int *oldtype);
????????type������ȡֵ:PTHREAD_CANCEL_DEFFERED�� PTHREAD_CANCEL_ASYCHRONOUS,����Cancel״̬ΪEnableʱ��Ч ,�ֱ���ʾ�յ��źź������������һ��ȡ�������˳��� ����ִ��ȡ������(�˳�) ;oldtype�����ΪNULL�����������ȡ����������ֵ��
��鱾�߳��Ƿ���Canceled״̬
void pthread_testcancel(void)
????????�����,������ȡ������ ,����ֱ�ӷ��ء�
��ֹ�߳�
void pthread_exit(void *value_ptr);
????????����
????????????????value_ptr: ���̵߳��˳���,���ݸ������̵߳ĵط�
????????��ֹ�߳̿��������ַ�ʽ:
- �̺߳�����ִ�н���;
- ����
pthread_exit�����˳��߳�; - ��ͬһ�����е�������߳�Cancel��
????????pthread_exit ������ʽ���˳�һ���̡߳�ͨ�������,pthread_exit() ���������߳���ɹ����������������ʱ�����á�
????????��� main() ���������������߳�֮ǰ����,��ͨ�� pthread_exit() �˳�,��ô�����߳̽�����ִ�С�����,���ǽ��� main() ����ʱ�Զ�����ֹ��
????????��������ǰ������ǰ�߳�,����Ǹ��߳�,���߳�Ҳ�����̽�����
????????�����main�̵߳Ļ�,������Դ�,ֻ�������߳�,�������̵߳�����Ȼ����,�����̲��˳���
????????ͨ��pthread_exit�˳����߳�,�����ͷ��߳���Դ,������Ҫͨ��pthread_detach��pthread_join���ͷš�
���Ӻͷ����߳�
int pthread_join(pthread_t thread, void **value_ptr);
????????����
????????????????thread ���̱߳�ʾ��
????????????????value_ptr ������ȡ�̵߳ķ���ֵ,һ���� pthread_join �������ݳ�����ֵ
????????pthread_join() ��һ���߳���������,���øú�����ȵ��߳̽����ż������С�������һ���߳�ʱ,����ij�����Իᶨ�����Ƿ��ǿ����ӵ�(joinable)��ɷ����(detached)��ֻ�д���ʱ����Ϊ�����ӵ��̲߳ſ��Ա����ӡ�����̴߳���ʱ������Ϊ�ɷ����,������ԶҲ���ܱ����ӡ� ��ͬһ���߳�ֻ��ʹ��һ��,���ұ�����Joinable״̬���߳�,�������̷��ش�����,���ȴ��߳�ִ����ϡ�
int pthread_detach(pthread_t thread);
????????����
????????????????thread ���̱߳�ʾ��
????????����ǰ�߳���pid���ͨ��pthread_create�������߳�,Ĭ���ǻᱣ��returnֵ��,ֱ�����˵�����pthread_join����ȡreturnֵ��
????????���ǰ�����״̬���߳̽���Joinable Thread,���û���˵���pthread_join,�����̴߳���ִ�������,returnֵ����һֱ����,�Ƚ��˷��ڴ���Դ��
????????ͨ��pthread_detach,���ǿ������߳��л���Detached״̬,���̴߳���ִ����,��������returnֵ��
????????pthread_detach�������߳��ж��Լ�ʹ��,Ҳ�����ڴ������̵߳ĸ��߳���,�����߳�ʹ�á�
������
????????�����������ڶ��߳������,��ֹ����߳�ͬʱ������Դ,�Ա�����߳�ͬʱ����ͬһ�������������ij�ͻ��
????????������ͨ��pthread_mutex_t��������ʾ,ֻ�л����mutex���߳�,���ܼ���ִ�д���,mutex���ͷź�,�����̲߳������»��mutex��
���ٲ���ʼ��һ���������
int pthread_mutex_init(pthread_mutex_t *restrict mutex,
const pthread_mutexattr_t *restrict attr);
????????����ͨ��������̬��ʼ��:
pthread_mutex_t mutex;
pthread_mutex_init(&mutex, nullptr);
????????Ҳ����ͨ��Ԥ����ĺ꾲̬��ʼ��:
pthread_mutex_t mutex;
mutex = PTHREAD_MUTEX_INITIALIZER;
���mutex��
int pthread_mutex_lock(pthread_mutex_t *mutex);
????????������ִ�к���Ĵ���,���mutex���ѱ������߳�ռ��,��һֱ�����ȴ���
�ͷ�mutex��
int pthread_mutex_unlock(pthread_mutex_t *mutex);
????????��Ҫ��֤ͬ���Ĵ���ִ�����,�ͷ��Ѿ���õ�mutex����
���Ի��mutex��
int pthread_mutex_trylock(pthread_mutex_t *mutex);
????????����ѱ������߳�ռ��,�����̷��ش����롣
????????��pthread_mutex_lock����������,pthread_mutex_lock�����õ�mutex,�ò�����һֱ�ȴ���
????????��pthread_mutex_trylockֻ�dz���һ��,�ò���������ֹͣ�ȴ�,�����������롣
��ʱ�汾��lock
#include <pthread.h>
#include <time.h>
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex,
const struct timespec *restrict abstime);
????????���������ָ��ʱ��,��û�еõ�mutex��,�ش����롣
????????ע��,�����ʱ�䲻��ָ1��,2�����ֳ�ʱ���,����������ʱ�������־���ĵȴ���ֹʱ�䡣
struct timespec time;
clock_gettime(CLOCK_REALTIME, &time); //��ǰϵͳʱ��
time.tv_sec += 10; //10����ϵͳʱ��
pthread_mutex_timedlock(&mutex, &time);
����mutex��
int pthread_mutex_destroy(pthread_mutex_t *mutex);
????????�Ѿ���lock��mutex,��destroy�᷵��EBUSY����
????????�Ѿ���destroy��mutex,��lock��������,�׳�pthread_mutex_lock called on a destroyed mutex�Ĵ���
????????�Ѿ���lock��mutex,��lock������(�������кܶ���,����ָ����Ĭ������)��
????????pthread_mutex_destroyʹ�ò���ȷ,�����������ʧ��,�ڴ���Դ�˷�,������ɳ������
????????����pthread_mutex_destroy��ʹ��һ��Ҫע������:
-
��
pthread_mutex_destroy����֮��,Ҫ��֤����mutex�ķ���,���ٱ�����,��ͨ��pthread_join,�ȴ���mutex��ص������̶߳�������,�ٵ���pthread_mutex_destroy�� -
�õ�
mutex�ķ���,һ��Ҫ��Ƴɿ��˳���,������ijЩ�����¾ͽ�����ѭ��,ͨ��pthread_joinҲ�������˳�,��ҪʱҪ���pthread_condʹ��,���ܴﵽ��ʱ�˳�ѭ����Ч����
������
�ο�����:pthread�Ļ������������� ���� zhaopengnju
�������뻥����������
????????�ڶദ����������,���������ֻ�ܱ�һ����ִ���̳߳��С����һ����ִ���߳���ͼ���һ��������(�Ѿ������е�)������,��ô���߳̾ͻ�һֱ����æ�ȴ�,����,Ҳ���ǿ�ת,�ȴ������¿��á������δ������,��������ִ���̱߳����̵õ���,����ִ�С�һ�������õ�������ʹ�����������߳��ڵȴ������¿���ʱ����,�ر���˷�CPUʱ��,������������Ӧ�ñ���ʱ��ij��С�ʵ����,���������������Ƴ���,�ڶ�ʱ���ڽ���������������
????????�ź����Ͷ�д�ź����ʺ��ڱ���ʱ��ϳ������,���ǻᵼ�µ�����˯��,���ֻ���ڽ���������ʹ�ö��������ж�������ʹ��,��Ϊ�жϵ������IJ���������(trylock����),������ж�������ֻ��ʹ����������
????????�����������ڼ�����ռʧЧ��(�ں˲���������ռ) ,���ź����Ͷ�д�ź��������ڼ��ǿ��Ա���ռ�ġ�
????????�������������ٽ���Ĭ���ǿ�����Ӧ�жϵ�,����������жϴ���������������ͬ��������,��ô�ᷢ������(�ں����������Թر��ж�)��
????????(ժ��noticeable�IJ���:25���߳�ͬ������Ϣ����)�������뻥��������һ��,Ψһһ�㲻ͬ�ľ��ǻ����������������ó�CPU,���������������ó�CPU,��һֱæ�ȴ�,ֱ���õ���!
????????���������û�̬ʹ�õıȽ���,���ں�ʹ�õıȽ϶�!��������ʹ�ó���:���ij���ʱ��Ƚ϶�,����˵С��2���������л���ʱ�䡣
????????���������û�̬�ĺ����ӿںͻ�����һ��,��pthread_mutex_xxx()��mutex����spin,��:pthread_spin_init()��
��������ʼ��
int pthread_spin_init(pthread_spinlock_t *lock, int pshared);
����������
int pthread_spin_lock(pthread_spinlock_t *lock);
int pthread_spin_trylock(pthread_spinlock_t *lock);
int pthread_spin_unlock(pthread_spinlock_t *lock);
����������
int pthread_spin_destroy(pthread_spinlock_t *lock);
���
�ο�����:linuxʹ�ö�д��pthread_rwlock_t
????????�ܶ�ʱ��,�Թ��������ķ����������ص�:�����������߳�ֻ�Ƕ�ȡ����������ֵ,������,ֻ�м����������,�̲߳Ż��������Ĺ���������ֵ�������������,������֮��֮��������ͬ����,����֮��IJ��������ǰ�ȫ�ġ����DZ��뻥��д���������������
�������������ʵ�����Ǵ��ڵ�,��������������ʱ����,�����Dz��ᷢ���仯��,ż������������õ���������ʹ�û�����,��ȫ��ֹ������,���������ܵ���ʧ���������ֿ���,POSIX�����˶�д����
????????����߳̿���ͬʱ��ö���(Reader-Writer lock in read mode),����ֻ��һ���߳��ܹ����д��(Reader-writer lock in write mode)
????????��д��������״̬:
- һ�����߶���̻߳�ö���,�����߳������д��
- һ���̻߳��д��,�����߳�����ö���
- û���̻߳�ô˶�д��
��ʼ����д��
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
????????��� attr Ϊ NULL,��ʹ��ȱʡ�Ķ�д������,�������봫��ȱʡ��д�����Զ���ĵ�ַ��ͬ����ʼ����д��֮��,��������ʹ���������,���������³�ʼ�����ɹ���ʼ��֮��,��д����״̬���Ϊ�ѳ�ʼ����δ������������� pthread_rwlock_init() ��ָ���ѳ�ʼ���Ķ�д��,�����Dz�ȷ���ġ������д����ʹ��֮ǰδ��ʼ��,�����Dz�ȷ���ġ�
????????���ȱʡ�Ķ�д����������,�� PTHREAD_RWLOCK_INITIALIZER ��ɳ�ʼ���Ծ�̬��ʽ����Ķ�д��,��������ͨ������ pthread_rwlock_init() ��������attr ָ��Ϊ NULL ���ж�̬��ʼ����Ч,�������ڲ���ִ�д����顣
????????����ֵ
????????����ɹ�,pthread_rwlock_init() �᷵���㡣����,����������ָ������Ĵ���š�
????????��� pthread_rwlock_init() ʧ��,�������ʼ�� rwlock,���� rwlock �������Dz�ȷ���ġ�
????????EINVAL:attr �� rwlock ָ����ֵ��Ч��
��ȡ��д���еĶ���
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
????????�������� rwlock �����õĶ�д��Ӧ�ö�����
????????���д����δ���ж���,����û���κ�д�������ڸ�������,������̻߳��ȡ���������д����δ���ж���,���ж��д�������ڵȴ�����ʱ,�����߳��Ƿ��ܻ�ȡ�����Dz�ȷ���ġ����ij��д�������ж���,������߳�����ȡ��������������߳�δ��ȡ����,�����������������̱߳����ȡ����֮��,���ܴ� pthread_rwlock_rdlock() ���ء�����ڽ��е���ʱ,�����̳߳��� rwlock �е�д��,�����Dz�ȷ���ġ�
????????Ϊ����д������Դ�ѷ�,�����ڶ��ʵ����ʹд���������ȼ����ڶ�ȡ����
????????һ���߳̿����� rwlock �г��ж�������Ķ���,���߳̿��Գɹ����� pthread_rwlock_rdlock() n �Ρ����̱߳������ pthread_rwlock_unlock() n �β���ִ��ƥ��Ľ������������
????????������δ��ʼ���Ķ�д������ pthread_rwlock_rdlock(),�����Dz�ȷ���ġ�
????????�߳��źŴ���������Դ��������ȴ���д�����̵߳��źš����źŴ������غ�,�߳̽������ȴ���д����ִ�ж�ȡ,�ͺ����߳�δ�ж�һ����
????????����ֵ
????????����ɹ�,pthread_rwlock_rdlock() �᷵���㡣����,����������ָ������Ĵ���š�
????????EINVAL:attr �� rwlock ָ����ֵ��Ч��
��ȡ��������д���е���
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
????????Ӧ�ö����ķ�ʽ�� pthread_rwlock_rdlock() ����,������������κ��̳߳��� rwlock �е�д������д�������� rwlock ����,�� pthread_rwlock_tryrdlock() ������ʧ�ܡ�
????????����ֵ
????????�����ȡ�������� rwlock �����õĶ�д��������ִ�ж�ȡ����,�� pthread_rwlock_tryrdlock() �������㡣���û�л�ȡ����,������ָ������Ĵ���š�
????????EBUSY:����ȡ��д����ִ�ж�ȡ,��Ϊд�������и��������ڸ�����������
������
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
????????�������� rwlock �����õĶ�д��Ӧ��д����
????????���û��������ȡ���̻߳�д�����̳߳��ж�д�� rwlock,������߳̽���ȡд��������,�����߳̽������������̱߳����ȡ����֮��,���ܴ�pthread_rwlock_wrlock() ���÷��ء�����ڽ��е���ʱ,�����̳߳��ж�д��(������д��),�����Dz�ȷ���ġ�
????????Ϊ����д������Դ�ѷ�,�����ڶ��ʵ����ʹд���������ȼ����ڶ�ȡ����
????????������δ��ʼ���Ķ�д������ pthread_rwlock_wrlock(),�����Dz�ȷ���ġ�
????????�߳��źŴ���������Դ��������ȴ���д����ִ��д����̵߳��źš����źŴ������غ�,�߳̽������ȴ���д����ִ��д��,�ͺ����߳�δ�ж�һ����
????????����ֵ
????????�����ȡ�������� rwlock �����õĶ�д��������ִ��д�����,�� pthread_rwlock_rwlock() �������㡣���û�л�ȡ����,������ָ������Ĵ���š�
������������
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
????????Ӧ��д���ķ�ʽ�� pthread_rwlock_wrlock() ����,������������κ��̵߳�ǰ�������ڶ�ȡ��д��� rwlock,��pthread_rwlock_trywrlock() ������ʧ�ܡ�
????????������δ��ʼ���Ķ�д������ pthread_rwlock_trywrlock(),�����Dz�ȷ���ġ�
????????�߳��źŴ���������Դ��������ȴ���д����ִ��д����̵߳��źš����źŴ������غ�,�߳̽������ȴ���д����ִ��д��,�ͺ����߳�δ�ж�һ����
????????����ֵ
????????�����ȡ�������� rwlock ���õĶ�д��������ִ��д�����,�� pthread_rwlock_trywrlock() �������㡣����,����������ָ������Ĵ���š�
????????EBUSY:��Ϊд���ȡ��д��,��Ϊ��Ϊ��ȡ��д�������ö�д����
����������
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
????????�������ͷ��� rwlock ���õĶ�д�������г��е�����
????????��������߳�δ���ж�д�� rwlock,�����Dz�ȷ���ġ�
????????���ͨ������ pthread_rwlock_unlock() ���ͷŶ�д�������еĶ���,��������������ǰ�ɸ����������,��ö���ᱣ�ֶ�ȡ����״̬�����pthread_rwlock_unlock() �ͷ��˵����߳��ڸö�д�������е����һ������,������̲߳����Ǹö������������� pthread_rwlock_unlock() �ͷ��˸ö�д����������һ������,��ö�д�����������������������״̬��
????????���ͨ������ pthread_rwlock_unlock() �ͷ��˸ö�д����������һ��д��,��ö�д�����������������������״̬��
????????��� pthread_rwlock_unlock() ��������ö�д������,���Ҷ���߳����ڵȴ���ȡ�ö�����ִ��д��,��ͨ�����Ȳ��Կ�ȷ����ȡ�ö�����ִ��д����̡߳��������߳����ڵȴ���ȡ��д��������ִ�ж�ȡ,��ͨ�����Ȳ��Կ�ȷ���ȴ��̻߳�ȡ�ö�����ִ��д���˳���������̻߳��� rwlock �еĶ�����д������,����ȷ����ȡ����д����˭�Ȼ�ø�����
????????������δ��ʼ���Ķ�д������ pthread_rwlock_unlock(),�����Dz�ȷ���ġ�
????????����ֵ
????????����ɹ�,pthread_rwlock_unlock() �᷵���㡣����,����������ָ������Ĵ���š�
���ٶ�д��
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
????????���������� rwlock ���õĶ�д�������ͷŸ���ʹ�õ��κ���Դ��
????????���ٴε��� pthread_rwlock_init() ���³�ʼ������֮ǰ,ʹ�ø�����������Ӱ���Dz�ȷ���ġ�ʵ�ֿ��ܻᵼ��pthread_rwlock_destroy() �� rwlock �����õĶ�������Ϊ��Чֵ������������̳߳��� rwlock ʱ����pthread_rwlock_destroy(),�����Dz�ȷ���ġ���������δ��ʼ���Ķ�д���������ȷ������Ϊ�������ٵĶ�д���������ʹ�� pthread_rwlock_init() �����³�ʼ�������ٶ�д������֮��,�����������ʽ���øö���,�����Dz�ȷ���ġ�
????????����ֵ
????????����ɹ�,pthread_rwlock_destroy() �᷵���㡣����,����������ָ������Ĵ���š�
????????EINVAL:attr �� rwlock ָ����ֵ��Ч��
��������
????????��������ͨ��pthread_cond_t��������ʾ,���Ĺ���ԭ���ܼ�,�߳�A������ij�д���,һֱwaitһ��cond,�߳�B����һ��cond,��ô�߳�A�յ�cond��,����ͻᱻ����,���Լ�������ִ�С�
????????���Ǹ��dz�ʵ�õĹ���,�����ô�ͳ��while(bool flag)ȥ�����߳�����ʱ,����ִ��������ѭ�����,���ܻص�flag�ж�,���ַ�ʽ�����߳�ֹͣ�Dz�����,Ҳ����ʵʱ��Ч,��pthread_cond_t��߱�ʵʱ�������ص㡣
��ʼ��һ��cond����
int pthread_cond_init(pthread_cond_t *restrict cond,
const pthread_condattr_t *restrict attr);
????????cond�ij�ʼ����mutexһ��,���Զ�̬��ʼ��,Ҳ����ͨ����̬������ʼ����
//��̬��ʼ��
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
//��̬��ʼ��
static pthread_cond_t cond;
pthread_cond_init(&cond, nullptr);
�ȴ�һ��cond�źŵ���
int pthread_cond_wait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex);
????????pthread_cond_waitʵ�ʰ�������������Ϊ:
????????�����ͷ���mutex,�����ڵȴ�cond�ڼ�,�����߳�Ҳ�ǿ���ʹ�ñ�mutex��������Դ�ġ�
????????Ȼ�����wait_cond������,һֱ�ȴ�cond�ĵ���,ֱ�������߳�ͨ��signal������һ��cond��
????????�õ�cond��,�̻߳����³�������mutex,�����ɹ���pthread_cond_wait������return��
��ʱ�汾��wait
int pthread_cond_timedwait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex,
const struct timespec *restrict abstime);
????????��pthread_mutex_timedlockʹ�÷�������һ�¡�
����һ��cond�ź�
int pthread_cond_signal(pthread_cond_t *cond);
????????����һ������wait_cond״̬���߳�,����ж��wait���߳�,���ȴ�˳��,�������ȿ�ʼ�ȴ��ġ�
//wait�߳�,�����źŵ��߳�
pthread_mutex_lock(&mutex);
pthread_cond_wait(&cond, &mutex);
//do something ...
pthread_mutex_unlock(&mutex);
//signal�߳�,�����źŵ��߳�
pthread_mutex_lock(&mutex);
//do something ...
pthread_cond_signal(&cond);
//do something ...
pthread_mutex_unlock(&mutex);
????????cond�����������mutex������ʹ�á�
????????cond��mutex����Ϊ�˿��ƶ��ٽ���Դ�ķ���,cond����֪ͨ,mutex����������
????????����֪ͨ����,��Ȼ���ܱ�֤���߳�ͬ��,mutex���Ա�֤�ؼ�������ԭ���Ժ������ԡ�
????????������������-������ģ��������,��͵���ʹ��mutexʱ��ԭ����һģһ���ġ�
//�ٽ���Դ
static int count = 0;
//�������߳�,����������Դ
while(count == 0) //1
pthread_cond_wait(&cond); //2
count = count - 1; //5
//�������߳�,����������Դ
count = count + 1; //3
pthread_cond_signal(&cond); //4
????????������������������,1-2-3-4-5(ûʳ��-��ʳ��-����ʳ��-��ʳ��-��ʳ��)��
????????���ڶ��߳��龰��,��������ִ��˳���Dz���Ԥ���,ʲô��������ܷ�����
????????����1-3-4-2(ûʳ��-����ʳ��-��ʳ��),����signal��waitִ�е���,��ʹ��ʳ��,Ҳ����ʵʱ�յ�֪ͨ��
????????Ҳ������3-4-1-1-5-5(ֻ������һ��ʳ��,�������߳�ͬʱȥ��ʳ��,count���Ϊ����)��
????????����ϣ���������,12һ��ִ��,���ܲ�ɢ,34һ��ִ��,���ܲ�ɢ,5ִ���ڼ�count���ܱ������̷߳��ʡ�
????????����mutex֮��,����ʵ��������Ҫ��Ŀ��,��ȷ��������:
//�ٽ���Դ
static int count = 0;
//�������߳�,����������Դ
pthread_mutex_lock(&mutex);
while(count == 0)
pthread_cond_wait(&cond, &mutex);
count = count - 1;
pthread_mutex_unlock(&mutex);
//�������߳�,����������Դ
pthread_mutex_lock(&mutex);
count = count + 1;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
�����д���wait״̬���̷߳���һ��cond�ź�
int pthread_cond_broadcast(pthread_cond_t *cond);
????????���д���wait״̬���̶߳�����cond,������ȻҪȥ����mutex,���ܼ���ִ�С�
����cond����
int pthread_cond_destroy(pthread_cond_t *cond);
????????��pthread_mutex_destroyʹ�÷�������һ��
����
????????��֮ǰ��ʵ����ΪC���汾:
nano main.c
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
static int tickets = 20;
void *fun(void *args)
{
while (1)
{
pthread_mutex_lock(&mutex);
if (tickets > 0)
{
usleep(*(int *)args * 100000);
--tickets;
printf("(Thread %d)the remaining tickets: %d\n", *(int *)args, tickets);
}
pthread_mutex_unlock(&mutex);
if (tickets == 0)
break;
}
return NULL;
}
int main(int argc, char *argv[])
{
pthread_t id[3];
int i;
int ID[3] = {1, 2, 3};
for (i = 0; i < 3; ++i)
{
pthread_create(&id[i], NULL, fun, &ID[i]);
pthread_detach(id[i]);
}
pthread_exit(NULL);
return 0;
}
nano Makefile
main: main.o
cc -o main main.o -lpthread
main.o: main.c
cc -c main.c
.PHONY:clear
clear:
rm *.o
rm main
make
./main