���ݿ�ϵͳ�������������
��������
��õĻ��������η����Ϳ��ո��롣
����������
ȷ�������Եķ���֮һ��Ҫ����������Ի��ⷽʽ���з��ʡ�
ʵ�ָ�������õķ�����ֻ����������ʵ�ǰ�����������(lock)�������
��
- ������:
�������T�����������Q�ϵĹ�������(��ΪS),�� T�ɶ�������дQ�� - ������:
�������T�����������Q�ϵ���������(��ΪX),�� T�ȿɶ��ֿ�дQ��
Ҫ��ÿ������Ҫ�����Լ�����������Q���еIJ������������ʵ�������
����ֻ���ڲ������ƹ�������������������ܼ����������
�����������͵�ʹ�ÿ����ö�������ȡһ�������������ͬʱֻ����һ���������д������
���ڸ�����һ�������ͼ���,���������ϰ����·�ʽ����һ�����ݺ���:��A��B���������������,��������
T
i
T_i
Ti?�����������Q��A������,������
T
j
(
T
i
��
T
j
)
T_j(T_i \neq T_j)
Tj?(Ti?��?=Tj?)��ǰ��������Q��ӵ��B��������
����������Q�ϴ���B������,�������
T
i
T_i
Ti?�����������������Q�ϵ���,�����Ǿ�˵A��������B�����������ݵ���
һ������ֻҪ���ڷ���������,���ͱ���ӵ�и��������ϵ���������,�������ڶ������������һ�η��ʺ������ͷŸ��������ϵ���Ҳδ���ǿ�ȡ��,��Ϊ�п��ܲ��ܱ�֤�ɴ��л���
 ����������ִ��,���ܳ������µ���1��
����������ִ��,���ܳ������µ���1��
 �õ�����ʾ������ִ�еĶ����Լ��������ƹ�����Ȩ������ʱ�̡�
�õ�����ʾ������ִ�еĶ����Լ��������ƹ�����Ȩ������ʱ�̡�
��������������Ҳ������ƹ�������Ȩ����֮ǰ����ִ����һ��������
�ٶ������������ͷ�����


�������ܵ���һ�ֲ��ܻ�ӭ�����Ρ�
����һ���ĸ�����������ִ�е�״̬,�������γ�Ϊ������
��������ʱ,ϵͳ����ع����������е�һ����

ͨ���������Ļ���,���DZ�֤��ִ�������������������,��ʹ����ת��������������ij����,Ҳ������Ϊ����,���������Ȼ��ᡣ
���������˹������ݵ�һЩ��ͻ��ʹ���ݲ�һ�¡�
��������,���ͷŹ���,������Ȼ����֤����һ���ԡ�
����������һ����������,�������ļ���˳��,ijЩ����»����������
������A����������X����,����Y����,������B����������Y����,����X��������ʱ��������,���߶�������ִ�С�
����Э����һ�����:
�涨�����ʱ���������ǽ��м�����������
����Э�������˿��ܵĵ�����Ŀ����Щ������ɵļ��������п��ܸ��Ŀɴ��л����ȵ�һ�����Ӽ���
����S�������Э��Aʱ,��S��A���ǺϷ��ĵ��ȡ�
������Э��A�ĵ��ȿɱ�֤Ϊ��ͻ�ɴ��л�����,�����Э��ɱ�֤��ͻ�ɴ����ԡ�
��������
����:
ָ���ǵ�ǰ����A���������X��д��,X��ǰ�ѱ�����B���˹�������,A�ȴ��г�����һϵ�ж�X����������,��������,�ʶ�A�����ȴ�������(����A������Զ����ȡ�ý�չ)��
��ͨ�������·�ʽ��Ȩ�����������������:������A�����������X��M����ʱ,������������Ȩ������������:
- 1.��������������X�ϳ�����M������ͻ��������������
- 2.�����ڵȴ���������X����������A�������������
���,һ����������Ͳ��ᱻ���ļ�������������
���η���Э��
��֤�ɴ����Ե�һ��Э�������η���Э�顣
��Э��Ҫ��ÿ���������������������ͽ������롣:
- ������
�ɻ����,�����ͷ����� - ������
���ͷ���,���ɻ������
���κ���������и�����������������λ�ó�Ϊ�������������
��������˳��,�õ�һ�����л��������������Э����ȶ�Ӧ�ij�ͻ�ɴ��л��ȼ۵��ȡ�
Ҫ��һ����֤��������(���⼶���ع�),���ϸ����η���Э��,��Ҫ������,��Ҫ��������е����������������ύ���ͷš�
��һ���Ʊ���:ǿ���η���Э��,��Ҫ������,��Ҫ�������ύǰ�����ͷ��κ�����
��������+������ת��
����:�����еĹ���������Ϊ������,ֻ�ܷ����������Ρ�
����ʱ,��������������д�������Ĺ�����,�������ȴ���
����:�����е�����������Ϊ������,ֻ�ܷ����������Ρ�
������Э��,Ҳ�ɱ�֤�����ĵ����ǿɴ��л���(�����ĵ���,ָ����ʵ��ִ������,�м���ȵ�ʱ��Ϊ����,��δִ�е�,��������ִ��������.��������������ֵ���ִ������������,��ִ��ʱ�̵�λ����)
������ֱ������������ͷ���,�ɱ�֤������
������ʵ��
������������ʵ��Ϊһ������,�������������Ϣ��������Ϣ��
�����������������������Ϣ������������Ϣ,����Ҫ������ع�����Ϣ(��������ʱ)��
������Ϣֻ��Ҫ�õ�һ��ȷ�ϻش�,����������Ϊ�����ȴ��������������Ϣ��
��������ʹ���������ݽṹ:
ΪĿǰ�Ѿ�������ÿ��������ά��һ������,ÿһ������Ϊ������һ����¼,�������˳������
��ʹ��һ������������Ϊ������ɢ�б������������е�������(����еĻ�);���������������
һ���������������ÿһ����¼��ʾ���ĸ��������������,�Լ�������ʲô���͵���,�ü�¼����ʾ�������Ƿ�����������
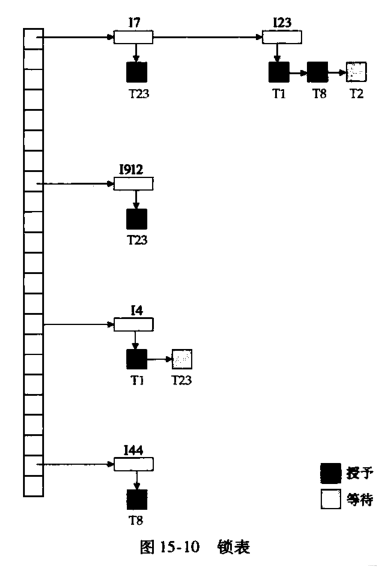
������Ӧ��ά��һ�����������ʶ��������,������������Ч��ȷ������������е�������
��������������������:
- һ����ij�������������ʱ,�ȶ�λ�����
�����������,����.����֯�������������������,��������
�����������,����������͵�ǰ�����������Ƿ��ͻ��
������ͻ,��һ���ж��Ƿ����ȵ�����Դ�������ļ�������,����,�ȴ���ǰ����������,�����衣����,�ȵ��ȴ�״̬�ļ�������,����,����������
����ͻ,����ȴ�,���������� - һ����ij������Ľ�������ʱ,�ȶ�λ������,ɾ����������������Ԫ��,����Ƿ�����Ŷӵȴ�����
������,�����������Ƿ�ɱ���Ȩ,������,����Ȩ������,����Ȩ��
��ɶԶ���Ԫ����Ȩ��,�ɼ�������µĶ���Ԫ�ء� - ������ֹʱ,
�������������δ����ļ������뽫��ȡ����
������ʱ,�����Ѿ����е��������ͷš�
����ͼ��Э��
ǰ��:��Ҫ֪��������Ҫ���ʵ�����������˳��
���ݲ��벢�����ϲ����������,������˳��Ҫ����һ��ͼ,������Ϊ������ͼ,��Ϊ���ݿ�ͼ��
������Э����,���õļ���ָ��ֻ�� lock-X ��
���������һ������������ܼ�һ����,����������¹���:
- �״μ���,��ֱ�Ӷ������������
- ���״�,����������ǰ,�������ȶ�������������ȼ�����
- ����,��ʱ���ԡ�
- ��������ͬһ������ֻ�ɱ�����һ��(�������A������������,A�����ٶԸ����������)��
�ɱ�֤�����ķ���Э��ĺϷ�����,�dz�ͻ�ɴ��л��ġ�
�ŵ�:�������������
ȱ��:���״�,�����������ǰ,�������ȶ�������������ȼ�����
��������
����һ������·,��·��ÿ��������Ϊ��һ��������е���Դ������(ÿ�����������������һ������������Դ)��
��������ʱ,�����ѡ��һ������������,����ع������ij����ʱ��֮ǰ,���ڸõ�õ�һ����,���ͷŸ����Ϳ��Խ��������
������������������:
- ����Ԥ��Э��
��֤ϵͳ������������״̬�� - �������������ָ�����
������������,ͨ���������������,ͨ�������ָ����лָ���
����Ԥ��
����Ԥ�������ַ���:
-
�Լ���������������Ҫ��ͬʱ�������������֤���ᷢ��ѭ���ȴ���
��Ļ�����:����ʼǰһ�η��������漰���������,Ҫôһ��ȫ������Ҫôȫ��������
ȱ��:
1)������ʼǰͨ������Ԥ֪��Щ��������Ҫ������
2)������ʹ���ʿ��ܺܵ�,��Ϊ������������ܷ����ܳ�ʱ��ȴ�ò�����
��һ�ֻ���:��������ָ��˳��,ͬʱҪ�������谴�涨˳����������
�÷�����һ��������ʹ�������������η���������ȫ�� -
ÿ���п�������ʱ,��������ع���
ʹ����ռ������ع���
����B����A����,���ܽ�B�ع������ͷ���,������A��
��ÿ������һ��Ψһ��ʱ���,ϵͳ��ʱ�������������Ӧ�ȴ����ǻع���
����ʱ��������ֲ�ͬ������Ԥ������:
1.wait-die��������ռ��
����A��������������B����
��A��ʱ���С��B,��A�ȴ�;��A��ʱ�������B,��A�ع���
2.wound-wait������ռ(ʱ���ԽС���ȼ�Խ��)��
����A��������������B����
��A��ʱ�������B��ʱ���,��A�ȴ�;��A��ʱ���С��B��ʱ���,B�ع���
��һ�ִ��������ļ�����������ʱ��
��ʱʱ,����ع���
��ʱʱ�����ȷ����һ�����⡣һ����Ժ���ȷ��һ������ʱ֮ǰӦ�ȴ��ʱ�䡣���ѷ�������,�ȴ�ʱ��̫�����²���Ҫ���ӳ١�����ȴ�ʱ��̫��,����û������,Ҳ������������ع�,�����Դ�˷ѡ�
�û���Ҳ���ܻ����������
���������ָ�
���ϵͳû�в����ܱ�֤������������Э��,��ôϵͳ������ü����ָ����ơ�
���ϵͳ״̬���㷨�����Եؼ���,�ж��������������������������,��ϵͳ�������Ŵ������лָ���
ϵͳ����:
- ά����ǰ������������������й���Ϣ,��δ����������������Ϣ��
- �ṩһ��ʹ����Щ��Ϣ�ж�ϵͳ�Ƿ��������״̬���㷨��
- ������㷨����������ʱ,�������ָ���
�������
���������ó�Ϊ�ȴ�ͼ������ͼ����ȷ������
��ͼ�� G=(V,E)�����,����V�Ƕ��㼯,E�DZ���
ÿ���������һ������,������A�ڵȴ�����B�ͷ�ij������,����ڱ�A�C>B��
���ҽ����ȴ�ͼ������ʱ,ϵͳ�д���������
�ڸû��е�ÿ�������Ϊ��������״̬��
 ��ͼ��ʾ�ĵȴ�ͼ,˵����������Щ����:
��ͼ��ʾ�ĵȴ�ͼ,˵����������Щ����:
- ����T17�ڵȴ�����T18��T19��
- ����T19�ڵȴ�����T18��
- ����T18�ڵȴ�����T20��
���ڸõȴ�ͼ��,���ϵͳû�д�������״̬��
����Ƶ������ʱ,��⼤��Ƶ��ҲӦ��Ӧ���ӡ�
�������лָ�
��һ������㷨�ж���������ʱ,ϵͳ������������ָ���
���������ͨ���������ǻع�һ����������
���ȡ�Ķ���������:
- 1.ѡ��������
��������:
1.�����Ѿ������˶��,����ɽ��������á�
2.�����Ѿ�ʹ���˶���������,����ɻ���ʹ�ö��������
3.�ع�ʱ��ǣ��������� - 2.�ع�
���ع�:��ֹ������,Ȼ�����¿�ʼ��
���ֻع�:Ҫ��ϵͳά������������������Ķ���״̬��Ϣ��
����������Ӧȷ��Ϊ��������,ѡ��������Ҫ�ͷ���Щ���� - 3.����
ͬһ�������DZ�ѡΪ������ʱ������
����ѡ��ʱ���ǵ�������ѱ��ع�������
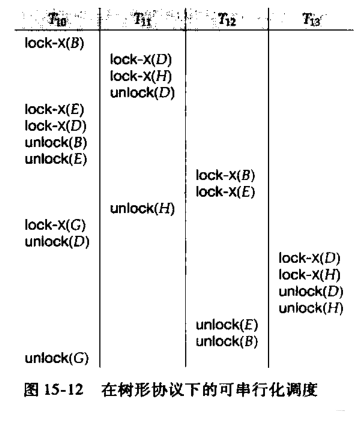
������
��һ�������������ϼ���ʱ,��ͳ�ǶԼ�����ÿ�����������μ�����
�༶������,�����Դ��������ϵ�һ��������һ�μ�����
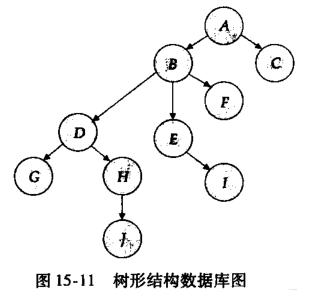
һ���ص�:
�Ӹ���ÿ���ڵ�����ֻ��һ��·����
��������:������,��������
��ij�ڵ�A����Bʱ,��ʽ�ضԽڵ�A���к���ڵ����B��
���������ij���ڵ����Tʱ,���������ڵ�·����ÿ���ڵ�X,�����ж��ڵ�XĿǰ������������,���������T�Ƿ�����;
�����ֲ�����,���������ȴ���
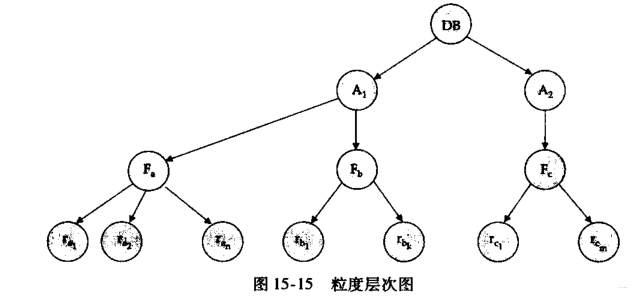
����������
�ڸ��ڵ�A��ʽ����T�Ĺ�����,һ����,�ǽڵ�A������ʽ����T;һ����,��A�����к�̨�ڵ������ʽ����T��
��һ����,�ԴӸ���A��·����ÿ��A�����Ƚڵ�������������T��
�빲�������������һ��������,�������������������һ����������
���һ����������������������(IS),��ô�������ĽϵͲ������ʾ����,��ֻ�ܼӹ�������
���һ������������������(IX),��ô�������ĽϵͲ��д��ʾ����,���Լ���������������
���,��һ��������������������������(SIX),���Ըý��Ϊ����������ʾ�ؼ��˹�����,���ҽ������ĸ��Ͳ���ʾ�ؼ���������
�����ȷ���Э����֤�ɴ��л�����:
- ������Q�ĸ��ڵ���IX,IS��ʱ,��Q�ɼ�S��IS��
- ��Q�ĸ��ڵ���IX��ʱ,��Q�ɼ�X,IX����
- ������������,��һֻ����,�ζ�ֻ������
- ��Q���ӽ�������ʱ,�ɶ�Q������
��Э����ǿ�˲�����,�����������������������������ͻ�϶��ɵ�Ӧ������������:
- ֻ���ʼ���������Ķ�����
- �������ļ���һ���ļ������ɱ����ij�����
����ʱ�����Э��
ʱ���
����ϵͳ��ÿ������
T
i
T_i
Ti?,��һ��Ψһ�Ĺ̶�ʱ���������ϵ����,���¼�����Ϊ
T
S
(
T
i
)
TS(T_i)
TS(Ti?)��
��ʱ�����������
T
i
T_i
Ti?��ʼִ��ǰ�����ݿ�ϵͳ����ġ�
������
T
i
T_i
Ti?�Ѹ���ʱ���
T
S
(
T
i
)
TS(T_i)
TS(Ti?),��ʱ��һ������
T
j
T_j
Tj?����ϵͳ,��
T
S
(
T
i
)
<
T
S
(
T
j
)
TS(T_i) < TS(T_j)
TS(Ti?)<TS(Tj?)��
ʵ�����ֻ��ƿ��Բ��������������ķ���:
- 1.ʹ��ϵͳʱ����ֵ��Ϊʱ���;��,�����ʱ������ڸ��������ϵͳʱ��ʱ��ֵ��
- 2.ʹ����������,ÿ����һ��ʱ���,���������Ӽ���;��,�����ʱ������ڸ��������ϵͳʱ�ļ�����ֵ��
ϵͳ��֤�������ĵ��ȵȼ��ڰ�ʱ��������Ĵ��е���(ʱ���С����ǰ,����ں�)��
ÿ���������������ʱ���:
- **W-timestamp(Q):**�ɹ�ִ��write(Q)��������������ʱ�����
- **R-timestamp(Q):**�ɹ�ִ��read(Q)��������������ʱ�����
ʱ�������Э��
ʱ�������Э����֤�κ��г�ͻ�� read �� write ������ʱ���˳��ִ�С�
��Э��������ʽ����:
-
��������A����read(Q)
a. ��TS(A) < W-timestamp(Q)
����,A֮���ij�����Ѿ�д��Q��
A�ع�,���¿�ʼ������µ�ʱ�����b. ��TS(A)>=W-timestamp(Q)
����,A֮ǰ��ij����д��Q��
�����л�����,��������Aǰ��ֹ��
A��ʱ��Q�ǿ��Եġ�
����Q�Ķ�ʱ���Ϊ���ж�������ʱ��������ġ� -
��������A����write(Q)
a. ��TS(A)<R-timestamp(Q)
A֮���ij�������Q�����ݡ�
��ʱ������Aȥд,������ɴ��л���Ҫ��
A�ع�,���µ�ʱ������¿�ʼ��b. ��TS(A)<W-timestamp(Q)
A֮���ij����Kд��Q��
��ʱ������Aȥд,���һ����ʵ:K��дQ,A��дQ.
���������A-Q�ij�ͻ�ɴ��л�--��A�����в����ᵽQ��ǰ�档
A�ع�,���µ�ʱ������¿�ʼ��c. �������
ִ��write,��W-timestamp(Q)����ΪTS(A)��
������Э��ɱ�֤��ͻ�ɴ��л���
��Э����ܲ������ɻָ��ĵ��ȡ�Ȼ��,��Э����Խ�����չ,�����¼��ַ���֮һ����֤���ȿɻָ�:
- ������ĩβִ�����е�д�����ܱ�֤�ɻָ��Ժ�������,��Щд��������������������ԭ����:��д��������ִ�еĹ�����,�κ�������������д����κ������
- �ɻָ��Ժ�������Ҳ����ͨ��ʹ��һ�����ķ�����ʽ�ౣ֤,�ɴ�,��δ�ύ������Ķ��������Ƴٵ�����������������ύ֮��
- �ɻָ�����ͨ������δ�ύд������������֤,һ������T��ȡ������������д������,ֻ�������������ύ֮��,T�����ύ��
Thomas ���
ͨ����д������2������ɻع���Ϊ����,�õ��Ĺ����ΪThomas������
ͨ������д,Thomasд���������dz�ͻ�ɴ��л�������ȷ�ĵ��ȡ�
��Щ�����ķdz�ͻ�ɴ��л�����������ͼ�ɴ��л����ȵĸ��
Thomasд����ʵ������ͨ��ɾ�������Ĺ�ʱ��write������ʹ����ͼ�ɴ��л���
�������������ʹ��ϵͳ���Բ�������Э�������ܲ����Ŀɴ��л����ȡ�
������������S,S��.������ȵ�����һ�¡�
����������������,��ΪS,S����ͼ�ȼ���
1.��ÿ��������Q,��S������A��ȡ��Q�ij�ʼֵ,��S��������AҲ���ȡQ�ij�ʼֵ��
2.��ÿ��������Q,��S������Aִ����read(Q),���Ҷ�ȡ��ֵ������B��ij��write(B)������
��S��������Aִ����read(Q).Ҳ�豣֤��ȡ��ֵ������B��ͬһ��write(B)������
3.��ÿ��������Q,��S������Aִ��������write(Q),��S����Ҳ��������Aִ������write(Q)��
�������A��ͼ�ȼ���һ�����е���S,�ƴ˵���A�Ե���S����ͼ�ɴ��л��ġ�
������Ч�Լ���Э��
��Ч�Լ��Э��Ҫ��ÿ������ T i T_i Ti?�������������а�������������ִ��,��ȡ���ڸ�������һ��ֻ��������һ����������
��Щ��˳����������档
- ����
����һ����,ϵͳִ������ T i T_i Ti?��
���������ֵ�����벢���������� T i T_i Ti?�ľֲ������С�
����write����,�Ծֲ���ʱ�������е�,���������ݿ���������ĸ��¡� - ��Ч�Լ���
������ T i T_i Ti?������Ч�Բ��ԡ��ж��Ƿ����ִ��write��������Υ���ɴ����ԡ����������Ч�Բ���ʧ��,��ϵͳ��ֹ������� - д��
������ T i T_i Ti?��ͨ����Ч�Լ��,�� T i T_i Ti?�κ�д�����������ʱ�ֲ�����ֵ�����Ƶ����ݿ��С�ֻ�������������Ρ�
����ʱ���:
- 1.Start(
T
i
T_i
Ti?)
���� T i T_i Ti?��ʼִ�е�ʱ��. - 2.Validation(
T
i
T_i
Ti?)
���� T i T_i Ti?��ɶ���,����ʼ��Ч�Լ���ʱ��(��writeǰ���ʱ��) - 3.Finish(
T
i
T_i
Ti?)
���� T i T_i Ti?���д��ʱ�䡣(���һ��write������)
����
T
i
T_i
Ti?����Ч�Բ���Ҫ���κ�����TS(
T
k
T_k
Tk?)<TS(
T
i
T_i
Ti?)������
T
k
T_k
Tk?��������������������֮һ:
1.Finish(
T
k
T_k
Tk?)<Start(
T
i
T_i
Ti?)
���
T
k
T_k
Tk?������д�Ѿ������Ҹ��µ����ݿ��,
T
i
T_i
Ti?�ſ�ʼ��
��ȫ,����ɴ��л���
2.Start(
T
i
T_i
Ti?)<Finish(
T
k
T_k
Tk?)<Validation(
T
i
T_i
Ti?),���
T
k
T_k
Tk?��ʼд��
T
k
T_k
Tk?�ύ�����л���
T
i
T_i
Ti?д֮ǰ,
T
i
T_i
Ti?����ij�����
T
k
T_k
Tk?����������
T
i
T_i
Ti?������������ཻ.��ζ��
T
k
T_k
Tk?��д��Ӱ��
T
i
T_i
Ti?�Ķ�,Ҳ����Ӱ��
T
i
T_i
Ti?֮���д��
��ȫ,����ɴ��л���
����Ч�Լ�������,���������ֹ۵�ִ��,�ٶ������ܹ����ִ�в���������Ч,���Ҳ��Ϊ�ֹ۵IJ����������ơ�
������ʱ��������DZ��۵�,��Ϊ�����Ǽ�һ����ͻʱ,����ǿ������ȴ���ع�,��ʹ�õ����п����dz�ͻ�ɴ��л��ġ�
��汾����
����汾��������������,ÿ��write(Q)����Q��һ���°汾��
������һ��read(Q)ʱ,�������ƹ�����ѡ��Q��һ���汾��ȡ��
�������Ʊ��뱣֤���ڶ�ȡ�İ汾��ѡ���ܱ��ֿɴ����ԡ�
��汾ʱ�������
��ϵͳ�е�ÿ������A,��һ��Ψһ�ľ�̬ʱ�����֮����,��ΪTS(A)��
��ÿ��������Q,��һ���汾����
<
Q
1
,
Q
2
,
.
.
.
,
Q
m
>
<Q_{1}, Q_{2}, ..., Q_{m}>
<Q1?,Q2?,...,Qm?>
��֮����,ÿ���汾
Q
k
Q_{k}
Qk?��3�������ֶ�:
- Content
�� Q k Q_{k} Qk?�汾��ֵ�� - W-timestamp(Q)
���� Q k Q_{k} Qk?�汾�������ʱ����� - R-timestamp(Q)
���гɹ���ȡ Q k Q_{k} Qk?�汾�������ʱ����е����ֵ��
�˰汾������ʱ,ֵΪ�����ð汾�����ʱ�����
��汾ʱ����������:
������A����Q,ѡ��
Q
k
Q_{k}
Qk?,��Ϊ�ڴ�����ǰ���д���Ǹ��汾��
- 1.�������A����read,���� Q k Q_{k} Qk?����,�����Ƿ������ Q k Q_{k} Qk?�Ķ�ʱ�����
- 2.�������A����write,��A��ʱ���<����
Q
k
Q_{k}
Qk?�����ʱ���,�ع�A;
��A��ʱ���=W-timestamp( Q k Q_{k} Qk?),��ζ�� Q k Q_{k} Qk?������A����,���������ٴ�ȥд(�Ҵ���������δ��A֮ǰ����ʹ��),���� Q k Q_{k} Qk?���ݡ�
��A��ʱ���>���һ�ζ� Q k Q_{k} Qk?�����ʱ���,��ζ��A��д������һ����δ���κ���������ʹ�õ��°汾��
������Ҫ�İ汾�������¹���ɾ��:������ij������������汾 Q k Q_k Qk?�� Q j Q_j Qj?,�������汾�� W-timestamp ��С��ϵͳ�����ϵ������ʱ���,��ô Q k Q_k Qk?�� Q j Q_j Qj?�нϾɵİ汾���������õ�,�������ɾ����
��汾ʱ������������һ���ܺõ�����:������Ӳ�ʧ���Ҳ��صȴ���
Ҳ�����������õ�����:����,��ȡ������Ҫ����� R-timestamp �ֶ�,���Dz�������DZ�ڵĴ��̷��ʶ�����һ�Ρ����,�����ij�ͻͨ���ع������ǵȴ�����������������������ܴܺ�
��汾���η���
��������Ϊֻ������,����������
- ��������ִ��ǿ���η���Э��(������,�ύ��,ͳһ�ͷš�)���Ű��ύ����Ĵ��л���
- ֻ������
��ʼִ��ǰ,�����Ե�ǰ��������Ϊ��ʱ�����
ֻ������Ķ���Ӷ�汾ʱ�������Э�顣 - ��������
��һ��������ʱ,����������Ϲ�������,�������°汾ֵ��
дһ��������ʱ,�����������������,Ϊ����������°汾,���°汾��д�� - ����������ύ
���䴴�����������ʱ�����Ϊ������ֵ+1
���¼�����������1��
�ύ�豣֤ԭ���ԡ�
���ո���
����ʼִ��ʱ������һ�����ݿ�Ŀ��ա�
�����ڿ����ϲ���,����������������ȫ���뿪��
�������ݿ���������ύʱ,�账�����ܴ��ڵij�ͻ��
�ύ���������ͻʱ,�ύд��ʵ�����ݿ�����Ϊԭ�ӷ�ʽִ�С�
�����������Ч�Լ��鲽��
����������������ܸ���ͬһ�����
���¶�ʧ:
Aд��X,BҲд��X,A�ύ,B�ύ,��ʱXΪB�а汾,A�а汾������,��Ϊ���¶�ʧ��
��������A,
����A�IJ�������B:A��ʼ��ִ�г�ͻ���֮����B��Ծ�Ļ��߲����ύ�ġ�
-
���ύ��ʤ
A���벿���ύ״̬,������Ϊһ��ԭ�Ӳ���:
1.�����T������ÿ������S,��T����д�����һ����X,S�Ƿ��Ѿ���Xд�롣
2.�����S,T��ֹ��
3.�粻����S,Tִ���ύ,ԭ�ӷ�ʽд�����и��µ����ݿ⡣ -
�ȸ�����ʤ
����һ�ֽ����ڸ��²����������ơ�
����A��ͼ����һ��������X,�����X��д����
���X�ɱ�����,���X��д����ִ��:
1.���X�ѱ��κβ����������,A��ֹ��
2.���Xδ���κβ����������,ִ�в���(���ύ�����ݿ�)��
���X���ɱ�����,�����ȴ���
����Ϊ�������������ύ�ͷ��������,��ֹ��
����Ϊ��������������ֹ���ͷ�����,����������Ի�á�
��һ���ж�,X�Ƿ��ѱ�����������д��
��δ��д,���X������,ִ�в�����
�������
���ո��벻�ܱ�֤�ɴ��л���
����������������A��B,�Լ�����������S��T��
����A��S��T,Ȼ�����T,
����B��S��T,Ȼ�����S��
��������������ͼ,���л��ġ�
һ��������ÿһ�������Է�д������,���Dz���������ͬʱд������,���������Ϊдƫб��
�����ݿ�ǿ��ִ�е�������Լ��(������,���Լ��),�����ڿ����Ͻ��м�顣
�����������������������ɴ��л�,�Ҳ���������,���ǵ�һ��ֻ�����������ij��ʱ��ʱ���û�������⡣
���貢������A��B,�Լ�����������S,T��
A��T,Ȼ�����T,��B��S,T,Ȼ�����S��
ͬʱ����ִ������������û�����⡣
����A�ύʱB�Ի�Ծ��
����A�ύ��B��δ�ύʱ,�µ�ֻ������C����ϵͳ
C��ȡS��T��
C�Ŀ��հ���A�ĸ���,B�ĸ�����Ϊδ�ύ�ʲ���C�Ŀ�����
(���л���CҪ����B�ύ)��
ijЩ�ǿɴ��л�ִ��Ҳ���Եõ�һ���Խ��,�����л�ִ�н��һ������һ����Ҫ��
���������ɾ��������ν�ʶ�
- delete (Q):�����ݿ���ɾ��������Q��
- insert (Q):����һ���µ�������Q�����ݿ��в�����Qһ����ֵ��
ɾ��
- ���η���Э����,ɾ��������,����ӵ����������
- ��ʱ�������Э����,����ִ��������Ϊ write�������еIJ��ԡ�
����Aִ��delete(Q):
1.���TS(A)<R-timestamp(Q),��Q��ʱ��A֮��ij�����ȡ,����delete,A�ع���
2.���TS(A)<W-timestamp(Q),��Q��ʱ��A֮��ij������д,����delete,A�ع���
3.����,ִ��delete������
����
- �����η���Э����,
���Aִ��insert(Q),�����Q���������� - ��ʱ�������Э����,
���Aִ��insert(Q),�Ͱ�R-timestamp(Q), W-timestamp(Q)��ΪTS(A)��
ν�ʶ��ͻ�������
һ������Aִ�з���ij����A��Ԫ����ʡ�
һ������Bִ���漰ij����A��Ԫ����¡�
A��B����˳��ͬʱ,����A���ʵ�Ԫ��Ҳ��ͬ,����������Ϊ��������
�����������ʵ�Ԫ�鲻��;�����ҳ�Ԫ��ı�����ϢҲ�������
��������Э�������˹�ϵ�������Ŀ�����,��Э����������:
- ÿ����ϵ������һ��������
- �����ڹ�ϵ��һ�������������ҵ�Ԫ��,������ܷ���Ԫ�顣
ȫ��ɨ�豻����һ������������Ҷ�ڵ��ɨ�衣 - ���ҵ�����������Ҫ���ʵ���������Ҷ����ϻ�ù�������
- û����r������ǰ,�����ܲ���,ɾ��,����r��Ԫ�顣
�������ò���,ɾ��,�����漰������Ҷ����ϵ���������
�Բ���,ɾ��.�漰��Ҷ����ǡ����������,ɾ��ǰԪ���������ֵ��Ҷ��㡣
�Ը���,�漰��Ҷ����ǡ�������ǰ,�ĺ�Ԫ��������ֵ��Ҷ��㡣 - Ԫ���ճ��������
- ����ѭ���η���Э�顣
��ϵ�ϵIJ����ɾ��������Ҫ����Ƿ�����ν�ʡ�������,���������ͻ,�����ɾ������Ҫ�ȴ�ֱ��ν�������ͷš����ڸ��²���,Ԫ��ij�ʼֵ������ֵ��Ҫ����Ƿ�����ν�ʡ�
��Щ��ͻ�IJ��롢ɾ�����²���Ӱ��ν��ѡ�е�Ԫ�鼯��,��˲��������������ѻ��(������)ν�����IJ�ѯ����ִ�С���������Э��Ϊν������
ν������ʵ���в�����,��Ϊ��Ƚ�������������,����ʵ�ִ��ۺܴ�,���ֲ��ܴ��������Ķ���ô���
ʵ������һ���Լ���
����һ����
����һ������Ŀ�����ڲ��ر�֤�ɴ����Ե�ǰ���·��ڷ���������ֹ��
����һ���Եķ���Э���������:������(S),������(X)��
�Թ�����,����ʱ���,�ͷš�
��������,����ʱ���,ֻ����������ֹ���ύʱ�ͷš�
����֤�ɴ����ԡ�
�����ظ���(�������ζ�ȡ,������ͬ���)��
���������ݱ����Ѿ��ύ�ġ�
�α��ȶ���
�α��ȶ����Ƕ���һ���Ե�һ����ʽ,��Ϊ�����α�Թ�ϵ�е�Ԫ����е����ij������Ƶġ�
��������������ϵ,�α��ȶ��Ա�֤:
- ��������������Ԫ�鱻���Ϲ�������
- �����ĵ�Ԫ�鱻����������,ֱ�������ύ��
��֤�˶���һ����,��Ҫ�����η���,û�б�֤���ȵĿɴ����ԡ�
ʵ�����α��ĵ�������Ƶ�����ʵĹ�ϵ,����Ϊһ����߲����Ժ���ϵͳ���ܵķ�����
��Խ�û������IJ�������
���ֲ������Ʒ���:ʱ�������Ч�Լ��顢���ո��롣
-
������
���漰�û�����������Ϊ������������,��֤���ֺ�,�������Խ�û������� -
��������Ч�Լ����ֹ۲�������
Ԫ���а汾��,Ԫ�鴴��ʱΪ0��
1.��Ԫ����Ϊ�������ݿ�����
2.��ÿ�����µ�Ԫ��,��ԭ�ӷ�ʽִ������:
��鵱ǰ�İ汾���Ƿ�����״ζ�Ԫ������ʱ�İ汾�š�
���ƥ��,ִ��Ԫ�����,�汾��+1��
�����ƥ��,������ֹ.�ع�ִ�е����и��¡���������и���Ԫ��汾�ż���ƥ��,�����ύ��
�û��Ƶ�һ�����˵��ص������������ɵ�ʵ�������ݿ�ϵͳ���㡣
ѧϰ�ο�����:
�����ݿ�ϵͳ�����6��