JUC锁核心类AQS解析
简介
AQS是一个用来构建锁和同步器的框架,使用AQS能简单且高效地构造出应用广泛的大量的同步器,比如我们提到的ReentrantLock,Semaphore等,它使用一个int成员变量表示同步状态,通过内置的FIFO队列来完成资源获取线程的排队工作,它是我们实现大部分同步需求的基础。
AQS的主要使用方式是继承,子类通过继承同步器并实现它的抽象方法来管理同步状态,AQS的涉及是基于模板方法模式的,它内部定义好了所有跟锁相关的底层操作细节与算法骨架,只保留了几个方法让子类重写,子类只需要重写几个特定的方法,就可以实现一个同步组件的功能。
通过使用AQS来构建我们自己的同步组件,可以帮助实现者简化同步组件的实现方式,将同步状态管理、线程的排队、等待与唤醒机制等底层操作封装在AQS里面,并通过模板方法定义好AQS的算法骨架,使得AQS基本上算的上是开箱即用
使用示例
AQS提供了五个方法让子类重写
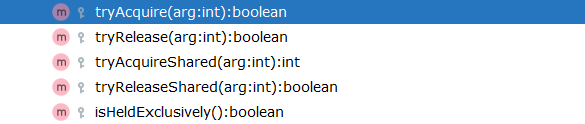
isHeldExclusively()//该线程是否正在独占资源。只有用到condition才需要去实现它。
tryAcquire(int)//独占方式。尝试获取资源,成功则返回true,失败则返回false。
tryRelease(int)//独占方式。尝试释放资源,成功则返回true,失败则返回false。
tryAcquireShared(int)//共享方式。尝试获取资源。负数表示失败;0表示成功,但没有剩余可用资源;正数表示成功,且有剩余资源。
tryReleaseShared(int)//共享方式。尝试释放资源,成功则返回true,失败则返回false。
如果我们想实现一个独占锁或者是实现一个共享锁,我们只需要重写其中两个方法即可。
而在我们重写这些方法的时候,我们可以用到AQS定义好的几个模板方法,来对同步状态进行操作。
下面通过一个简单的自定义同步组件,来展示一下AQS的使用方法
/**
* 通过AQS实现一个独占锁
*
*/
public class Mutex implements Lock {
/**
* 静态代理模式
* 代理类:Mutex
* 被代理类:SYNC
* */
private final static Sync SYNC = new Sync();
@Override
public void lock() {
SYNC.acquire(1);
}
@Override
public void lockInterruptibly() throws InterruptedException {
SYNC.acquireInterruptibly(1);
}
@Override
public boolean tryLock() {
return SYNC.tryAcquire(1);
}
@Override
public boolean tryLock(long time, TimeUnit unit) throws InterruptedException {
return SYNC.tryAcquireNanos(1,unit.toNanos(time));
}
@Override
public void unlock() {
SYNC.release(1);
}
@Override
public Condition newCondition() {
return SYNC.newCondition();
}
private static class Sync extends AbstractQueuedSynchronizer {
/**
* 获取独占锁
*
*/
@Override
protected boolean tryAcquire(int arg) {
//CAS设置state从0到1
if(compareAndSetState(0, 1)) {
//设置独占线程
setExclusiveOwnerThread(Thread.currentThread());
return true;
}
return false;
}
/**
* 释放独占锁
*/
@Override
protected boolean tryRelease(int arg) {
if(getState() == 0) {
throw new IllegalMonitorStateException();
}
setExclusiveOwnerThread(null);
setState(0);
return true;
}
/**
* 是否处于占用状态
* */
@Override
protected boolean isHeldExclusively() {
return getState() == 1;
}
Condition newCondition() {
return new ConditionObject();
}
}
}
实现分析
原理概览
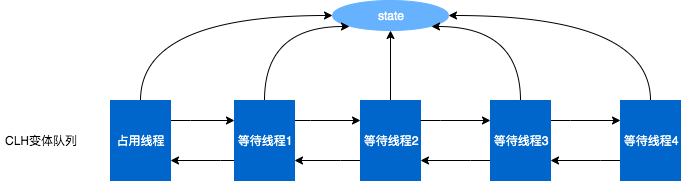
AQS的核心思想是,如果被请求的共享资源空闲,那么就将当前请求资源的线程设置为有效工作线程,将共享资源设置为锁定状态;如果共享资源被占用,就需要一定的阻塞等待唤醒机制来保证锁分配。而这个机制主要用的是CLH队列的变体实现的,将暂时获取不到锁的线程加入到队列中。
AQS使用一个Volatile的int类型的成员变量来表示同步状态,通过内置的FIFO队列来完成资源获取的排队工作,通过CAS完成对State值的修改。
同步队列
AQS中的队列是一个FIFO虚拟双向队列,AQS通过将每条请求共享资源的线程封装成一个节点来实现锁的分配。
同步队列节点
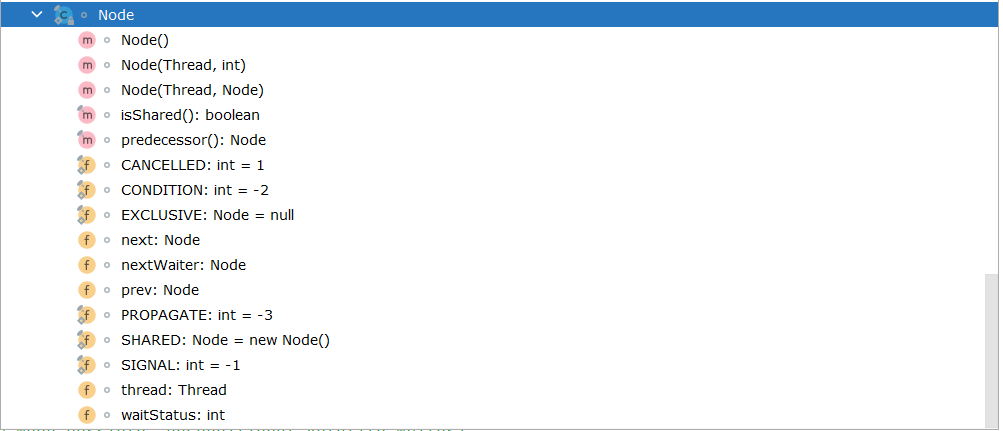
我们先看一下AQS这个内部类Node都包括哪些信息
| 方法和属性值 | 含义 |
|---|---|
| waitStatus | 当前节点在队列中的状态 |
| thread | 表示处于该节点的线程 |
| prev | 节点的前置指针 |
| next | 节点的后置指针 |
| nextWaiter | 指向下一个处于CONDITION状态的节点(与Condition队列实现有关) |
| predecessor() | 返回前驱节点(), 没有的话抛出NPE |
还有几个大小的变量,很明显是一些常量,int类型的常量是waitStatus状态的枚举值,Node类型的常量代表线程两种锁的模式。
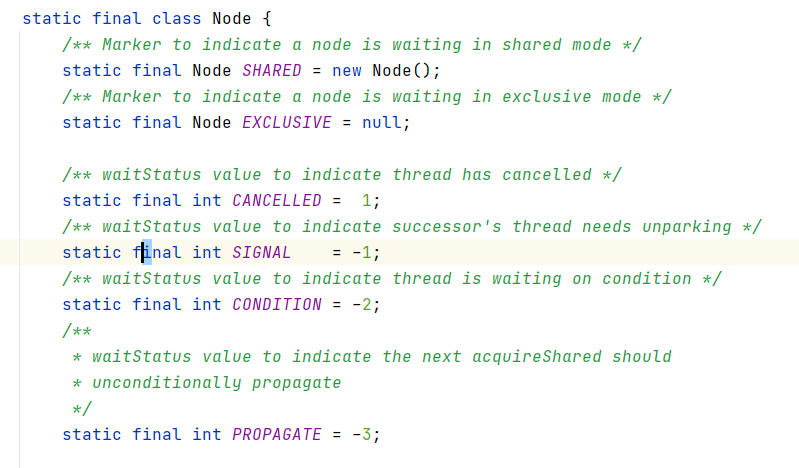
线程两种锁的模式
| 模式 | 含义 |
|---|---|
| SHARED | 为了表明一个节点处于共享模式等待锁(大白话翻译) |
| EXCLUSIVE | 表示线程正在以独占的方式等待锁 |
waitStatus的枚举值
| 枚举 | 含义 |
|---|---|
| 0 | 当一个Node被初始化之后的默认值 |
| CANCELLED | 为1,表示线程获取锁的请求已经取消了 |
| SIGNAL | 为-1,表示线程已经准备好了,就等资源释放了 |
| CONDITION | 为-2,表示节点在等待队列中,节点 |
| PROPAGATE | 为-3,当前线程处在SHARED情况下,该字段才会使用 |
入队
当一个线程获取锁失败后,会被构造成为一个节点并加入到同步队列中,而这个加入队列的过程必须要保证线程安全,因此同步器提供了一个基于CAS的设置尾节点的方法:compareAndSetTail(Node expect, Node update),它需要传递当前线程 “认为” 的尾节点和当前节点,只有设置成功后,当前节点才正式与之前的尾节点建立连接。
出队
队列的首节点是获取锁成功的节点,首节点的线程在释放同步状态时,将会唤醒后继节点,而后继节点将会在获取同步状态成功时将自己设置为首节点。
这个后继节点设置自己为首节点的过程中,原首节点就出队了。
由于只有一个线程能够成功获取到同步状态,因此设置头节点的方法并不需要使用CAS来保证,它只需要将首节点设置成为原节点的后继节点并断开原首节点的next引用即可
同步状态State
了解了同步队列之后,我们来看看AQS关于同步状态State的操作
(注意不要搞混了,state是锁的状态,waitState是等待线程的状态)
AQS提供了三个方法来操作该同步状态
| 方法名 | 描述 |
|---|---|
| protected final int getState() | 获取State的值 |
| protected final void setState(int newState) | 设置State的值 |
| protected final boolean compareAndSetState(int expect, int update) | 使用CAS方式更新State |
我们可以通过修改State字段来实现多线程的独占模式与共享模式
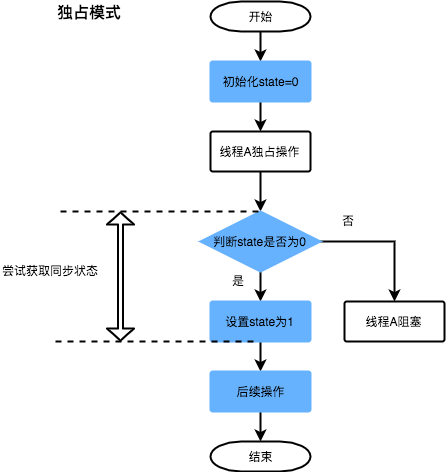
实现思路
- 独占模式
- 获取锁时将state CAS(0,1)。CAS成功就代表获取锁成功,CAS失败就代表获取锁失败
- 释放锁时将state设置为0
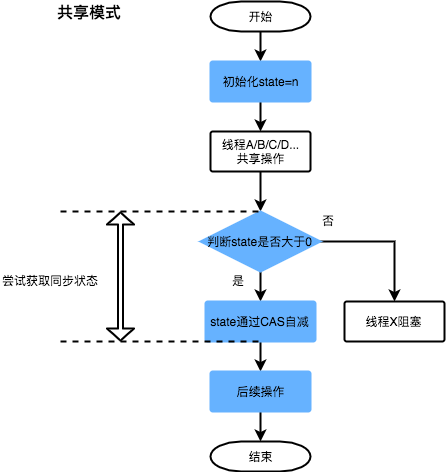
- 共享模式
- 获取锁时判断state是否大于0
- 大于0就通过CAS自减获取锁成功,小于0就阻塞
- 释放锁时将state通过CAS自增
源码分析
通过AQS源码来分析一下AQS对于锁的获取和释放流程。
独占模式
获取
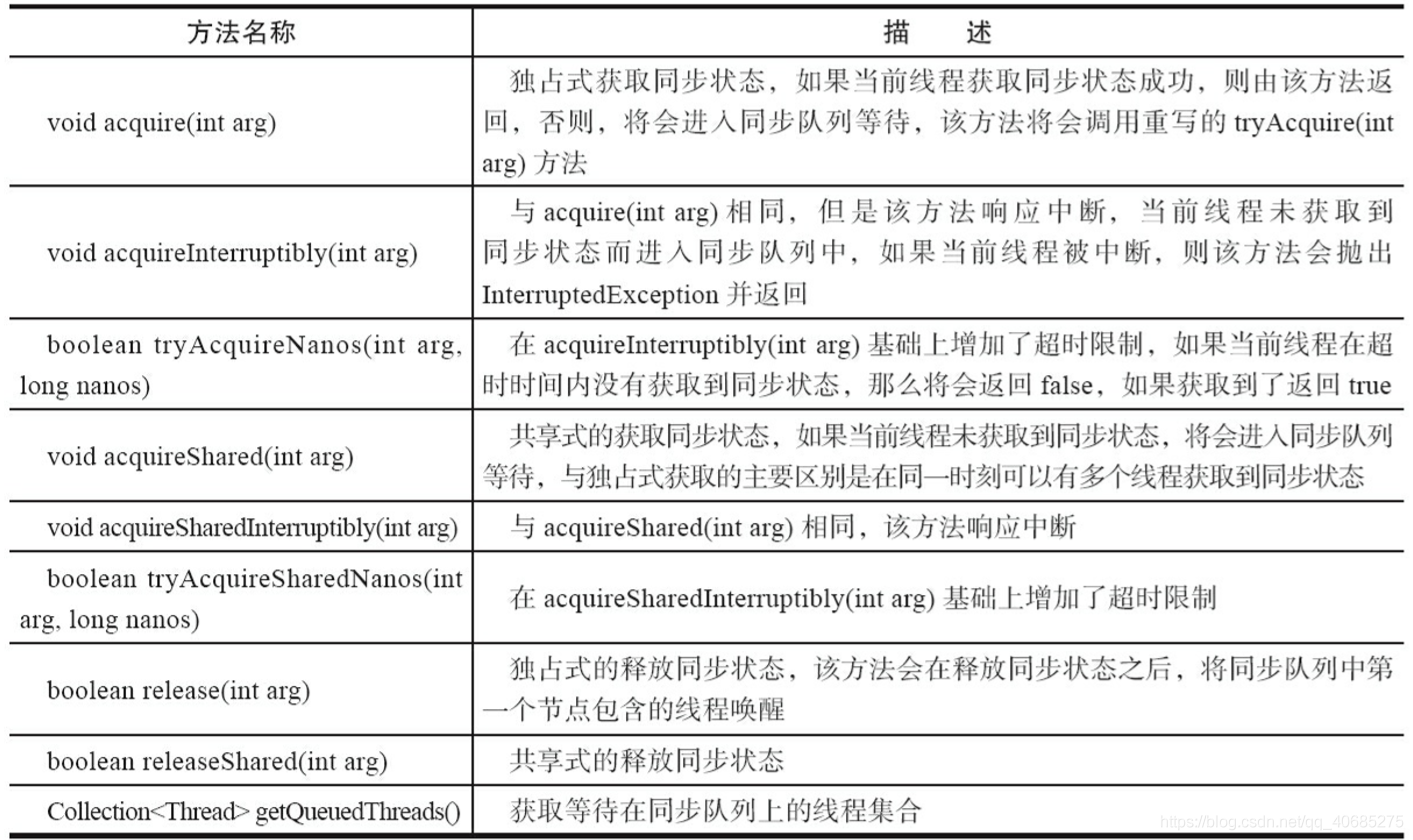
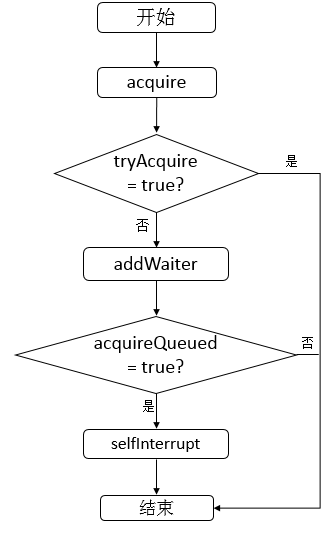
通过调用AQS的acquire(int arg)方法可以获取同步状态,该方法对中断不敏感,也就是说后续对该等待线程进行中断操作时,线程不会从同步队列中移出。
public final void acquire(int arg) {
//tryAcquire是我们自己重写的方法,返回的结果是获取锁成功还是失败
if (!tryAcquire(arg) &&
//addWaiter先执行
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
//获取锁失败且acquireQueued返回True就会中断该线程
selfInterrupt();
}
private Node addWaiter(Node mode) {
//创建Node
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
//将当前节点设置成尾节点
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
//CAS设置尾节点失败
enq(node);
return node;
}
private Node enq(final Node node) {
//死循环自旋
for (;;) {
Node t = tail;
if (t == null) { // Must initialize
if (compareAndSetHead(new Node()))
tail = head;
} else {
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
此时该线程就加入了同步队列里面,我们在看一下之前的acquireQueued(addWaiter(Node.EXCLUSIVE), arg)方法
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
//自旋状态,当条件满足时退出
for (;;) {
final Node p = node.predecessor();
//前置节点为head且尝试获取锁成功
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
//返回False,说明不需要中断
return interrupted;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
//取消获取资源
cancelAcquire(node);
}
}
// 当获取(资源)失败后,检查并且更新结点状态
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
//获取前驱结点的状态
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
//可以park
return true;
if (ws > 0) {
//找到pred结点前面最近的一个状态不为CANCELLED的结点
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
//赋值
pred.next = node;
} else {
// 为PROPAGATE -3 或者是0 表示无状态,(为CONDITION -2时,表示此节点在condition queue中)
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
// 进行park操作并且返回该线程是否被中断
private final boolean parkAndCheckInterrupt() {
//park当前线程,并且设置了blocker
LockSupport.park(this);
return Thread.interrupted(); // 当前线程是否已被中断,并清除中断标记位
}
总结
- acquire获取锁
- 失败后加入同步队列
- 执行acquireQueued方法
- 自旋,退出循环的条件是前置节点为Head节点且获取锁成功
- 否则会被LockSupport的park方法阻塞住等待唤醒,并且还会更新节点状态以及检查中断状态
释放
释放锁逻辑在release方法中
public final boolean release(int arg) {
//子类重写,返回的结果为释放成功还是失败
if (tryRelease(arg)) { // 释放成功
// 保存头节点
Node h = head;
if (h != null && h.waitStatus != 0) // 头节点不为空并且头节点状态不为0
unparkSuccessor(h); //唤醒头节点的后继结点
return true;
}
return false;
}
// 释放后继结点
private void unparkSuccessor(Node node) {
// 获取node结点的等待状态
int ws = node.waitStatus;
if (ws < 0) // 状态值小于0,为SIGNAL -1 或 CONDITION -2 或 PROPAGATE -3
// 比较并且设置结点等待状态,设置为0
compareAndSetWaitStatus(node, ws, 0);
// 获取node节点的下一个结点
Node s = node.next;
if (s == null || s.waitStatus > 0) { // 下一个结点为空或者下一个节点的等待状态大于0,即为CANCELLED
// s赋值为空
s = null;
// 从尾结点开始从后往前开始遍历
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0) // 找到等待状态小于等于0的结点,找到最前的状态小于等于0的结点
// 保存结点
s = t;
}
if (s != null) // 该结点不为为空,释放许可
LockSupport.unpark(s.thread);
}
后继节点此时就会被唤醒,继续在acquireQueued方法中执行自旋的逻辑,成功后则后续节点成功获取到了锁。
共享模式
获取
主要逻辑在acquireShared方法里
public final void acquireShared(int arg) {
//子类实现的方法,返回的值为int类型,> 0 就说明能够获取到同步状态
if (tryAcquireShared(arg) < 0)
//获取失败
doAcquireShared(arg);
}
private void doAcquireShared(int arg) {
//添加到同步队列中
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
//自旋
for (;;) {
final Node p = node.predecessor();
//前置节点为头节点
if (p == head) {
//尝试获取锁
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted)
selfInterrupt();
failed = false;
return;
}
}
//阻塞以及检查中断
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
- 尝试获取锁,失败则添加到同步同列中
- 自旋检查前置节点是否为头节点,是的话尝试获取锁
- 获取锁失败之后会阻塞且检查中断
- 等待unpark方法唤醒继续执行获取锁逻辑
释放
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
private void doReleaseShared() {
/*
* Ensure that a release propagates, even if there are other
* in-progress acquires/releases. This proceeds in the usual
* way of trying to unparkSuccessor of head if it needs
* signal. But if it does not, status is set to PROPAGATE to
* ensure that upon release, propagation continues.
* Additionally, we must loop in case a new node is added
* while we are doing this. Also, unlike other uses of
* unparkSuccessor, we need to know if CAS to reset status
* fails, if so rechecking.
*/
//由于共享锁会有多个线程获得锁,所以释放锁的时候要自旋防止CAS失败
//独占锁由于只会有一个线程获得锁,所以释放锁的时候直接CAS state就行了
for (;;) {
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
continue; // loop to recheck cases
unparkSuccessor(h);
}
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
}
if (h == head) // loop if head changed
break;
}
}
我们可以发现与共享锁的释放大体上一样,只不过需要自旋释放。
总结
AQS是一个功能很强大队列同步器类,基本上JUC下的多线程工具类都是由它实现,掌握了AQS的原理之后,大家就可以去研究一下ReentrantLock、Semaphore、CountDownLatch等是怎么实现的了。

参考文章
美团-从ReentrantLock的实现看AQS的实现原理
《Java并发编程的艺术》
Open JDK8 AQS源码

