# -*- coding: utf-8 -*-
# 二阶弹簧阻尼系统
class MassSpringDamper(object): # 系统的输出是当前位置, 输入是外部力
def __init__(self, m=1.0, b=10.0, k=20.0, f=0.0):
self.m, self.b, self.k, self.f = m, b, k, f # 元组赋值
def function(self, t, x_state): # 注意,使用ode顺序不同, 且必须返回列表或者数组,不能是元组
x = x_state[0]
v = x_state[1]
dx = v
dv = (self.f - self.k * x - self.b * v) / self.m
return [dx, dv] # 注意,使用ode必须返回列表或者数组,不能是元组
# -*- coding: utf-8 -*-
# PID控制器
class PID(object): # 控制器的输出是外力 f, 输入是误差(目标位置与当前位置的差值)
def __init__(self, kp, ki, kd, dt):
self.kp, self.ki, self.kd, self.dt = kp, ki, kd, dt # 元组赋值
self.last_error = None # 前次误差,起始时刻
self.status = 0.0 # 误差累加,用于积分项,起始时刻为0
def update(self, error): # 当前误差
p = self.kp * error # 比例项
i = self.ki * self.status # 积分项
if self.last_error is None: # 起始时刻
d = 0.0
else:
d = self.kd * (error - self.last_error) / self.dt # 微分项
self.status += error * self.dt # 更新误差累加,用于积分项
self.last_error = error # 更新误差
return p + i + d # 返回外部力 f
# -*- coding: utf-8 -*-
# -*- coding: utf-8 -*-
import numpy as np
from scipy.integrate import ode
from Python_SciPy.PID_Control import system
from Python_SciPy.PID_Control import controler
import matplotlib.pyplot as plt
# 整个系统模拟函数
def pid_control_system(kp, ki, kd, dt=0.01, end_time=3.0, target=3.0): # 目标位置
# 初始状态
x0_state = np.array([0.0, 0.0])
t0 = 0.0
# 二阶系统
sys = system.MassSpringDamper() # 形参参见system类
# 控制器
pid = controler.PID(kp, ki, kd, dt)
# 创建ode对象
r = ode(sys.function)
# 设置积分器相关参数
r.set_integrator('vode', method='bdf')
# 设定系统初始状态和时间
r.set_initial_value(x0_state, t0) # t0默认0.0
# 列表用于保存数据
t = [0]
result = [x0_state]
F_arr = [0]
# 开始
while r.successful() and r.t+dt < end_time:
# 积分计算
r.integrate(r.t + dt) # 返回状态向量(列表) r.y = [x, v], system类中的函数返回值是列表
# 误差
err = target - r.y[0]
# 控制器输出
F = pid.update(err)
# 更新系统的外控制力
sys.f = F
# 列表用于保存数据
print('时间: %s, 状态: %s, 外控制力: %s' % (r.t, r.y[0], F))
t.append(r.t) # 一维列表
result.append(r.y) # 二维列表
F_arr.append(F) # 一维列表
# 再转回numpy数组中, 方便可视化
result_np = np.array(result) # 二维数组
t_np = np.array(t) # 一维数组
F_arr_np = np.array(F_arr) # 一维数组
return [t_np, F_arr_np, result_np] # 用列表返回多个值,元组也可,习惯列表
# 绘图可视化
def PlotFigure(t, F, x_state):
plt.figure(figsize=(12, 8))
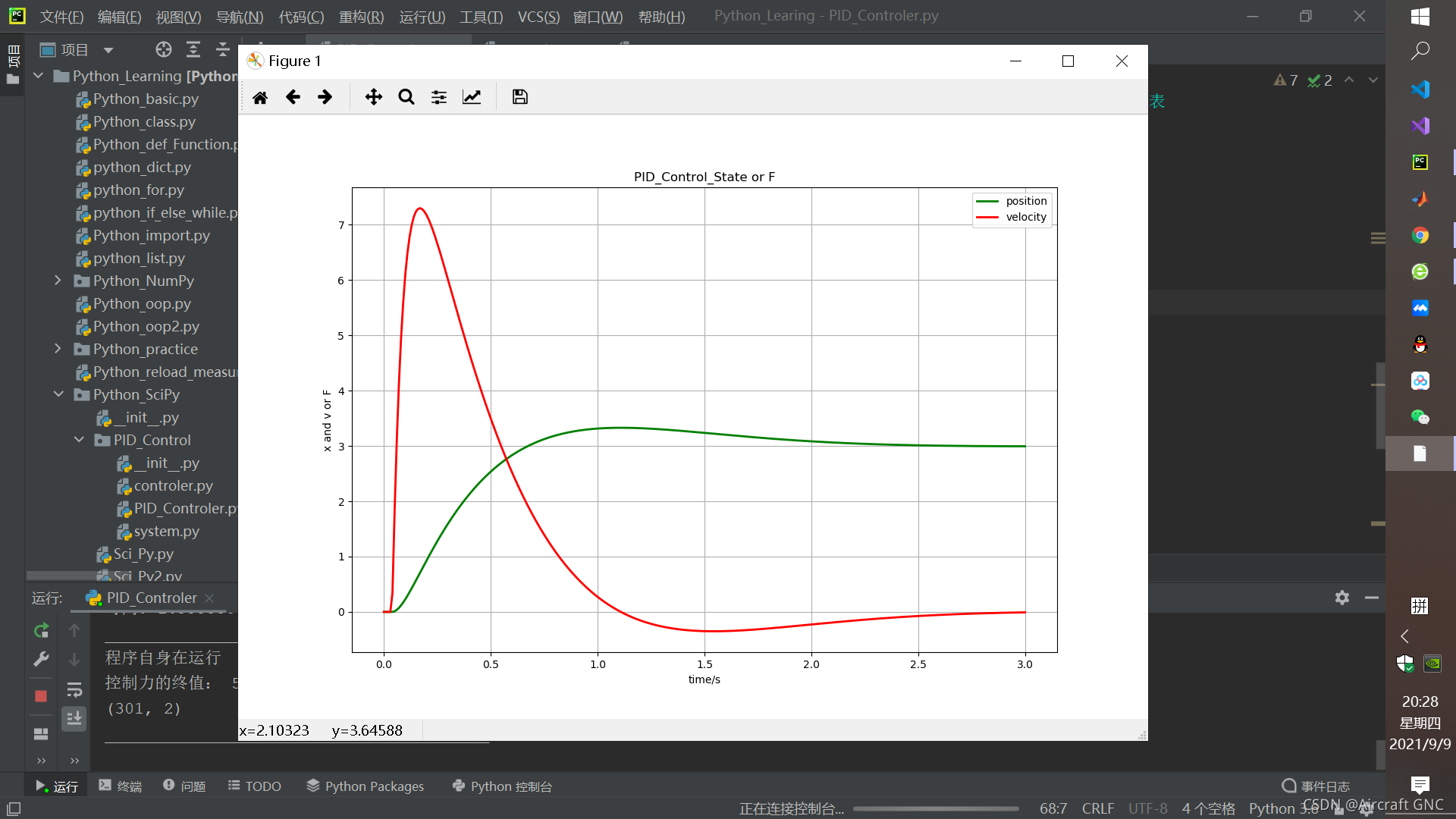
# plt.plot(t, x_state[:, 0], color='green', label='position', linewidth=2)
# plt.plot(t, x_state[:, 1], color='red', label='velocity', linewidth=2)
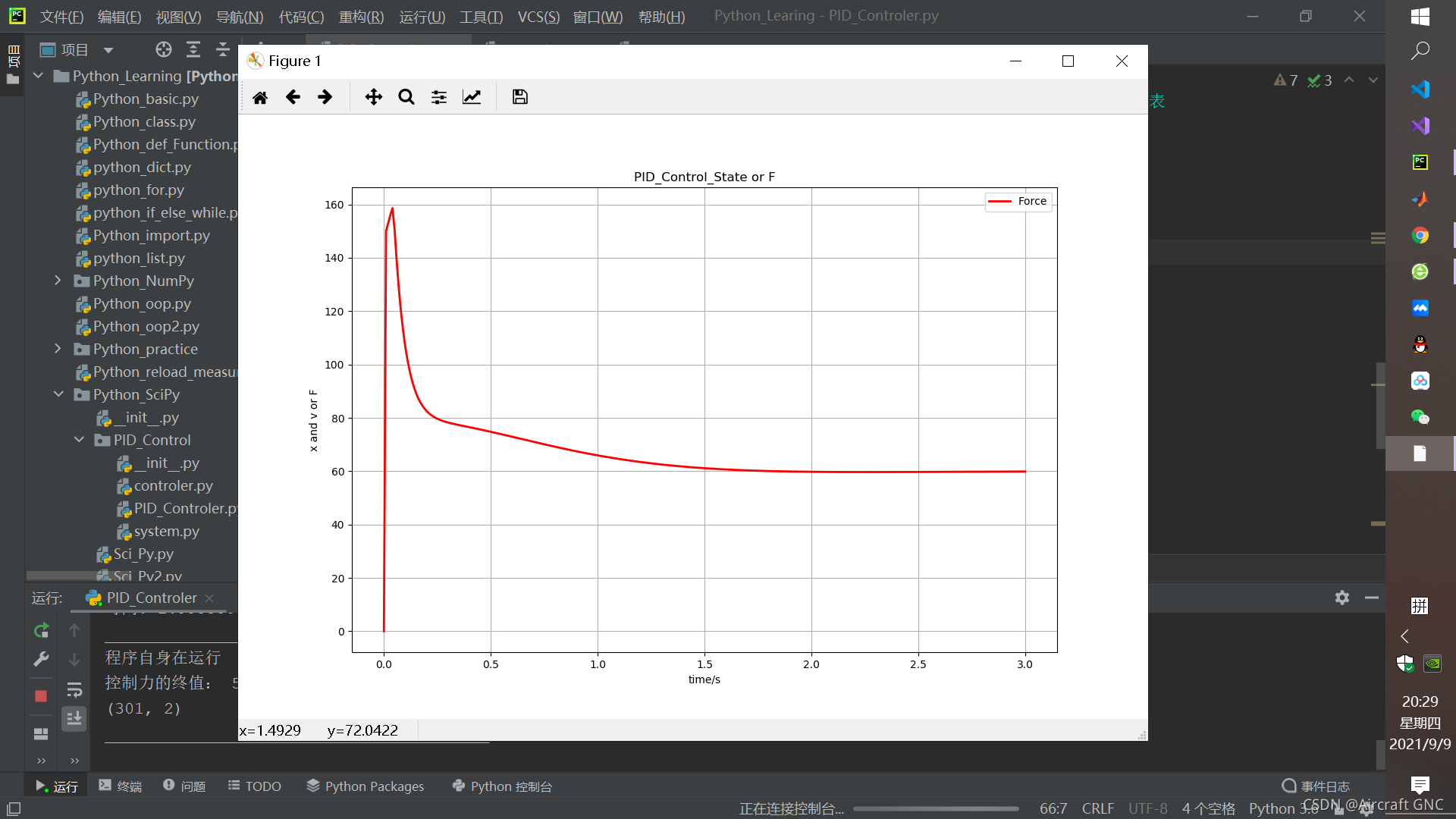
plt.plot(t, F, color='red', label='Force', linewidth=2)
plt.title('PID_Control_State or F')
plt.xlabel('time/s')
plt.ylabel('x and v or F')
plt.legend()
plt.grid()
plt.show()
if __name__ == '__main__':
# 运行主程序
[t, F_arr, result] = pid_control_system(50.0, 100.0, 10.0) # PID控制器参数
# 提示
print('_______________________________________')
print('程序自身在运行')
print('控制力的终值:', F_arr[-1])
print(result.shape)
print('_______________________________________')
# 绘图
PlotFigure(t, F_arr, result)
else:
print('我是被引入')
外部控制力变化如下