说明:本文引用 CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection,复现此论文中的代码,互相学习。
注意:由于博主这几天都在复现这个项目,博客的内容的进度也是博主项目复现的进度,如果遇到找不到页面的情况,是由于内容在待审核,过一会儿就出来了。
一、AutoDL云服务器
说明:如果使用其它服务器,可以忽略掉这部分。
- 目前,熟知的大众服务器基本上是腾讯、阿里云等,但是自己又是学生,按月租服务器实在太贵,自己仅仅只是学习而已

- 所以,这里我使用的服务器是 AutoDL,后续的代码复现也是围绕这个服务器执行。
AutoDL:适用学生租借,可以按小时结算!!!!!
官网链接:https://www.autodl.com/docs/

- 好的,现在我们注册好了~~~~~~~~~~~~~~
- 最好是学生认证一下,会便宜很多,还有优惠(这个就自己弄了,当然如果还不知道咋认证的话就就就就就・・・・・・
 拉倒吧~)。
拉倒吧~)。 - 什么?你不知道教育邮箱?
 去今日校园里面邮箱自助开户,然后・・・・・・等等,我是在复现代码的,不是来教开通教育邮箱的
去今日校园里面邮箱自助开户,然后・・・・・・等等,我是在复现代码的,不是来教开通教育邮箱的
- 好的,下面开始进入正题!!!!!!!!!!!!!!!!!!!!
- 租实例,需要注意的有两点,如下图所示:

- 内存:我之前租了个RTX A5000、内存32GB,然后报内存不够这个错误,所以后来我选了个RTX 3090、内存80GB,如果选择60GB,应该也是够的。
数据盘:这个盘一定要选择超过300GB的,才够用,这里是数据盘100GB+最大扩容300GB=共400GB - 然后选择1个GPU、扩容300GB。

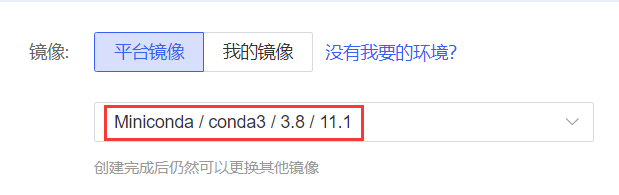
- 镜像选择。
- 然后,【立即创建】。
- 好了现在云服务器创建好了。
二、环境配置
- 先把源码下载下来。
- CenterFusion 源码地址:https://github.com/mrnabati/CenterFusion
- 打开 JupyterLab。

- 打开一个新终端。

- 按照 ConterFusion 中的 README.md 文件中的步骤进行配置。

第1步:新建虚拟环境
- 根据 README.md 文件中的信息可知,需要 python3.7 的版本。

- 所以新建一个 python3.7 的虚拟环境。
conda create -n env1 python=3.7
- 更新bashrc中的环境变量。
conda init bash && source /root/.bashrc
- 切换到创建的虚拟环境:env1
conda activate env1
第2步:安装 Pytorch
- 从官网上查看安装 Pytorch 的命令:https://pytorch.org/get-started/previous-versions/
- 选择 Pytorch 1.7.1 版本,由于云服务器系统中的 cuda 是 11.1 版本,所以选择下图红框的命令。

- 命令如下:
pip install torch==1.7.1+cu110 torchvision==0.8.2+cu110 torchaudio==0.7.2 -f https://download.pytorch.org/whl/torch_stable.html
第3步:安装 COCOAPI
- 命令如下:
pip install cython
pip install -U 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
- 如果安装失败,多试几次就行了。
第4步:克隆 CenterFusion 存储库
- 其实就是使用 git 下载 CenterFusion 源码并放进 CF_ROOT 这个路径中。
- 这里,我手动下载源码到 PC 中,然后通过 AutoDL 的公共网盘功能上传到云服务器中。
- AutoDL 云服务上传的文件都是放在 /root/autodl-tmp 文件夹中。
- 解压缩命令。
unzip CenterFusion-master.zip
- 解压缩后的文件夹为 CenterFusion-master,使用如下命令可以重命名文件夹:
mv + 重命名前 + 重命名后
如: mv CenterFusion-master CenterFusion
- 这里建立路径快捷方式的命令为(如果是其它服务器的话,路径会略有不同):
CF_ROOT=/root/autodl-tmp/CenterFusion
第5步:安装环境所需要的包
- 命令如下:
cd $CF_ROOT
pip install -r requirements.txt
第6步:构建可变形卷积库
- 源码中是没有 DCNv2 这个文件夹的,所以需要下载。
- 这里去这个网址:https://github.com/lbin/DCNv2/tree/pytorch_1.7 下载 DCNv2==1.7 版本的,然后再上传到服务器中。

- unzip 解压缩命令:
unzip -d 路径 .zip压缩包
- 这里需要解压缩到 ~/CenterFusion/src/lib/model/networks 文件夹下。
unzip -d /root/autodl-tmp/CenterFusion/src/lib/model/networks DCNv2-pytorch_1.7.zip
- 然后重命名 DCNv2-pytorch_1.7 为 DCNv2。

- 进入 DCNv2 中执行 make.sh 文件。
cd DCNv2
./make.sh
- 执行过程中,会出现警告,只要最后出现如下红框中的结果就行。
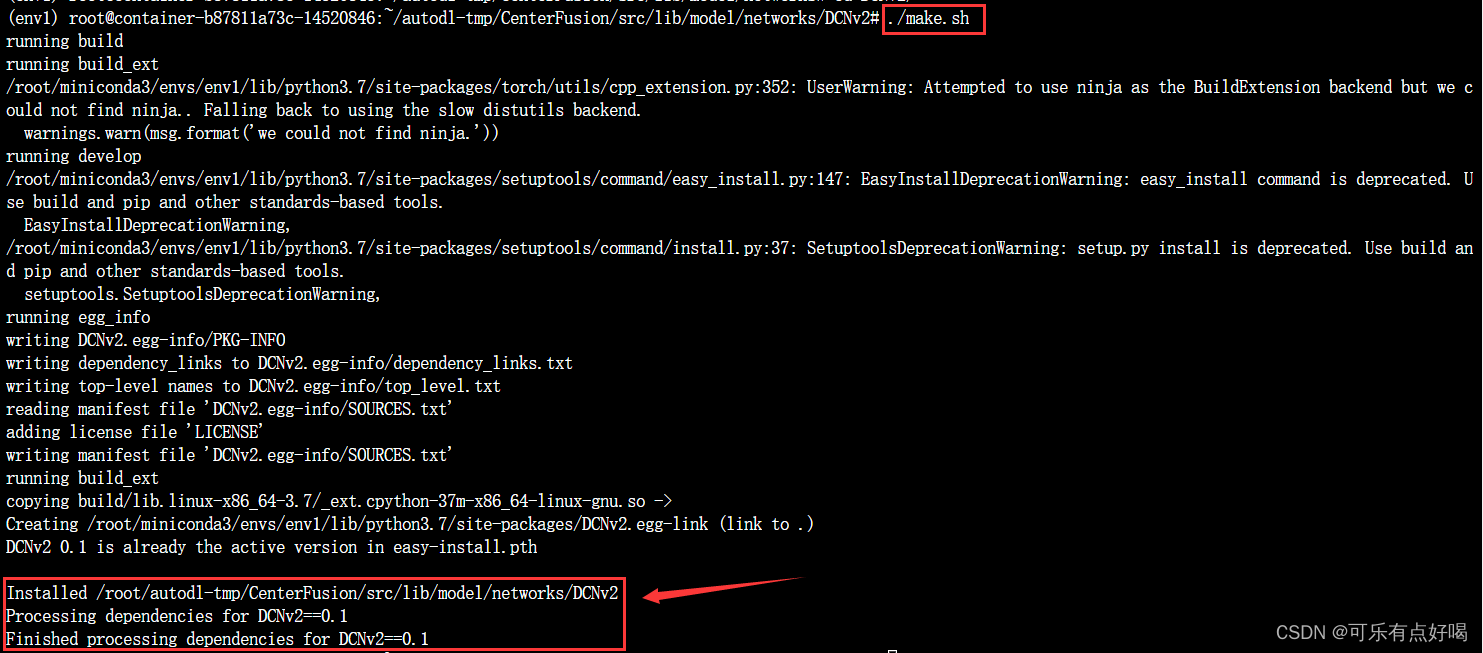
- 第一次执行 make.sh 文件时出现大量的警告,具体原因忘了
 反正不是代码的问题,图中没有警告信息是我第3次执行了。
反正不是代码的问题,图中没有警告信息是我第3次执行了。
三、数据集准备
-
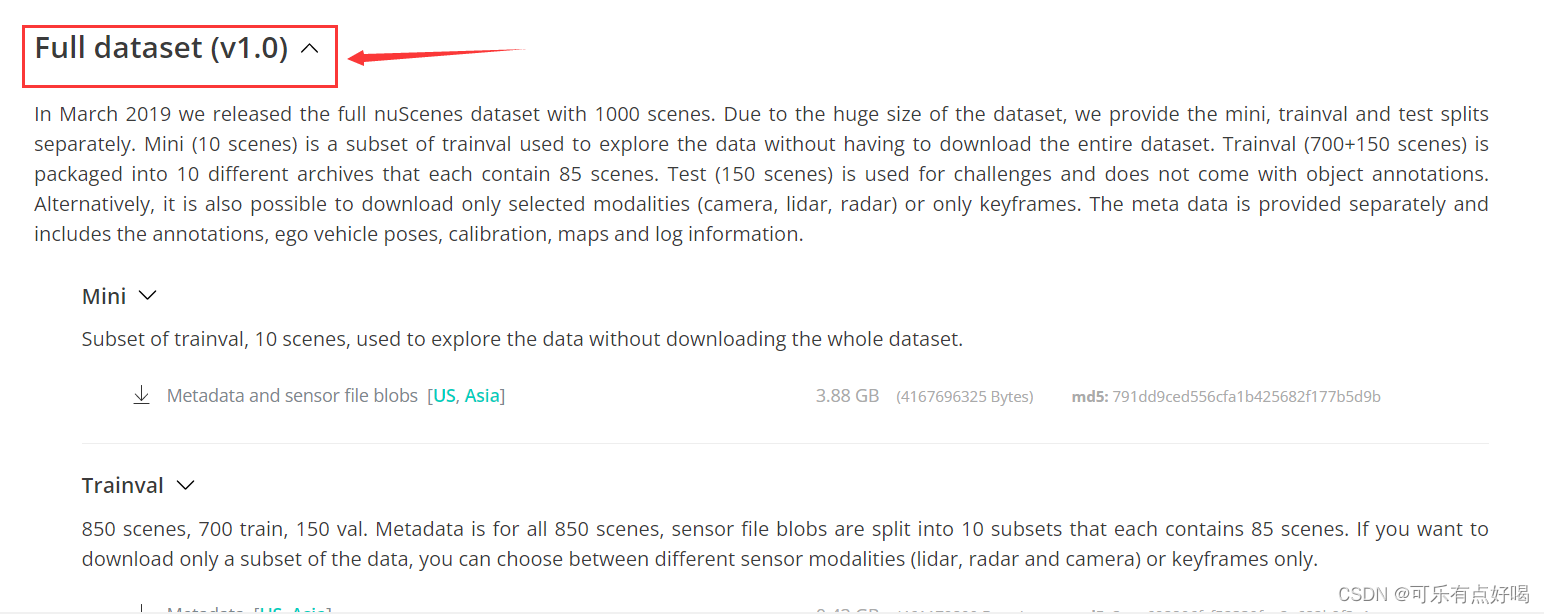
NuScenes 数据集官网:https://www.nuscenes.org/download
-
需要注册,再下载中找到完整的 NuScenes 数据集。
-
Mini 部分全部下载下来。

-
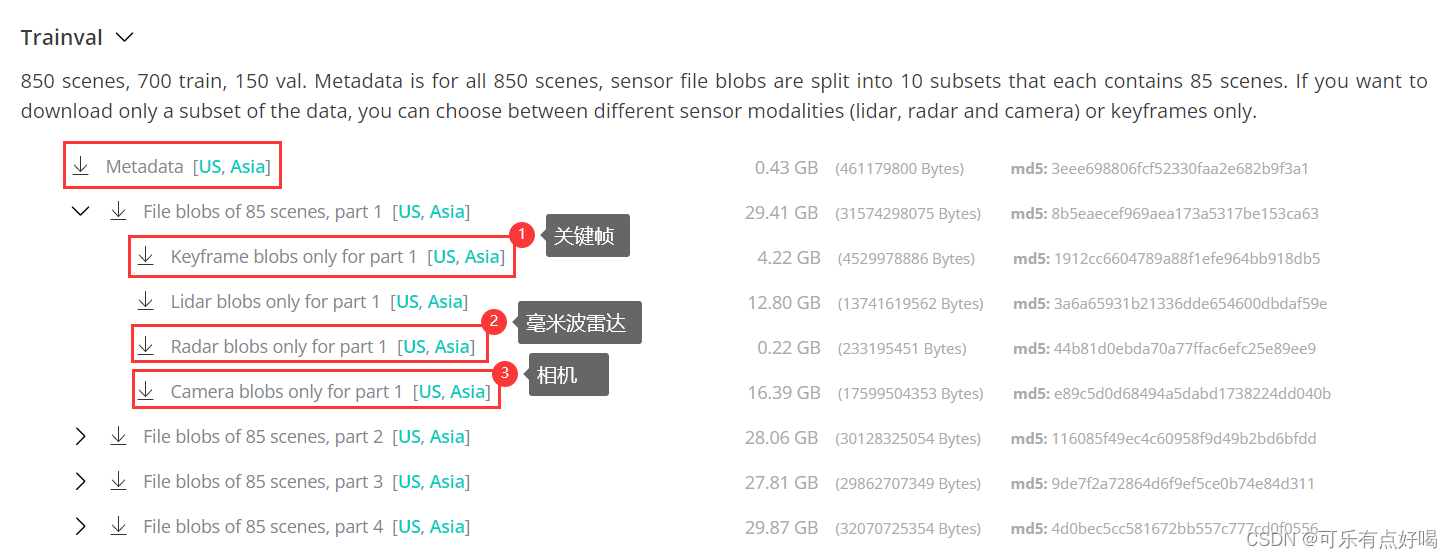
Trainval 部分只需要下载 Metadata,然后每个部分只需要下载 Keyframe(关键帧数据)、Radar(毫米波雷达数据)、Camera(相机数据)这三个,Lidar(激光雷达数据)就不用下载,共 10 个 part。
-
Test 部分需要下载 Metadata,再下载 Radar、Camera 即可。

-
共计 240GB 左右
 太特么大了!!!!
太特么大了!!!! -
最后将下载下来的数据集压缩包 .tgz 上传到服务器中。
-
这里先在 /CenterFusion/data 路径下新建一个 【nuscenes】文件夹,然后将 tgz 压缩包解压到 nuscenes 文件夹中。
-
如果想偷懒,而且会写批量解压缩 tgz 到指定文件夹的 sh 脚本的话,请务必教教我

-
如果不会写,看我接下来的神操作

-
现在,所有的压缩包都上传到服务器中了~~~~~~~~~~~~
-
开始解压缩・・・・・・
-
我先用命令 tar -zxvf .tgz压缩包 -C 路径 解压缩一个 tgz 压缩包,然后再用命令 rm .tgz压缩包 删除已经解压缩完的 tgz 压缩包,这样一直循环下去・・・・・・铛铛铛~解压缩完了
 俺不偷懒,最光荣,都是俺亲手解压滴~
俺不偷懒,最光荣,都是俺亲手解压滴~ -
解压完后 nuscenes 中的格式如下,它位于 ~/CenterFusion/data 路径下。
CenterFusion
`-- data
`-- nuscenes
|-- maps
|-- samples
| |-- CAM_BACK
| | | -- xxx.jpg
| | ` -- ...
| |-- CAM_BACK_LEFT
| |-- CAM_BACK_RIGHT
| |-- CAM_FRONT
| |-- CAM_FRONT_LEFT
| |-- CAM_FRONT_RIGHT
| |-- RADAR_BACK_LEFT
| | | -- xxx.pcd
| | ` -- ...
| |-- RADAR_BACK_RIGHT
| |-- RADAR_FRON
| |-- RADAR_FRONT_LEFT
| `-- RADAR_FRONT_RIGHT
|-- sweeps
|-- v1.0-mini
|-- v1.0-test
`-- v1.0-trainval
- 最后将数据集,转换为 COCO 格式。
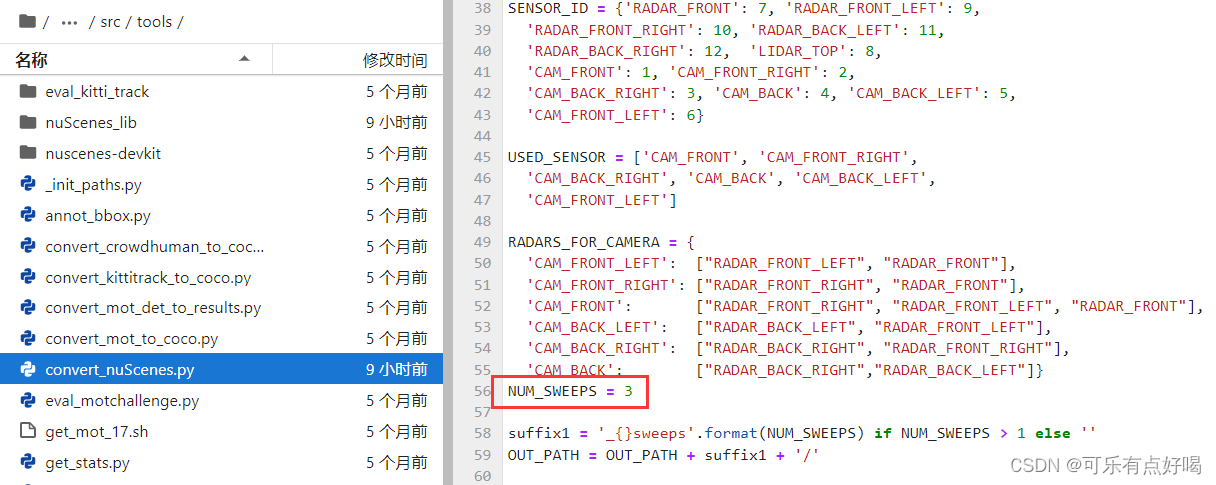
- 不过在转换之前,需要将 /CenterFusion/src/tools 路径下的【convert_nuScenes.py】文件中第 56 行,将 NUM_SWEEPS 的值改为 3,否则后面出现找不到数据集路径的错误。
- 然后开始转换。
cd $CF_ROOT/src/tools
python convert_nuScenes.py
- 如果转换的过程中,突然被 killed 掉,那是因为内存不够了,需要换个更大内存的服务器。
四、预训练模型下载
- 下载两个模型:
①centerfusion_e60:https://drive.google.com/uc?export=download&id=1XaYx7JJJmQ6TBjCJJster-Z7ERyqu4Ig
②centernet_baseline_e170:https://drive.google.com/uc?export=download&id=1iFF7a5oueFfB5GnUoHFDnntFdTst-bVI - 然后将其解压缩到 /CenterFusion/models 文件夹中即可。

五、训练
- 使用 /CenterFusion/experiments/train.sh 脚本可以用来训练网络。
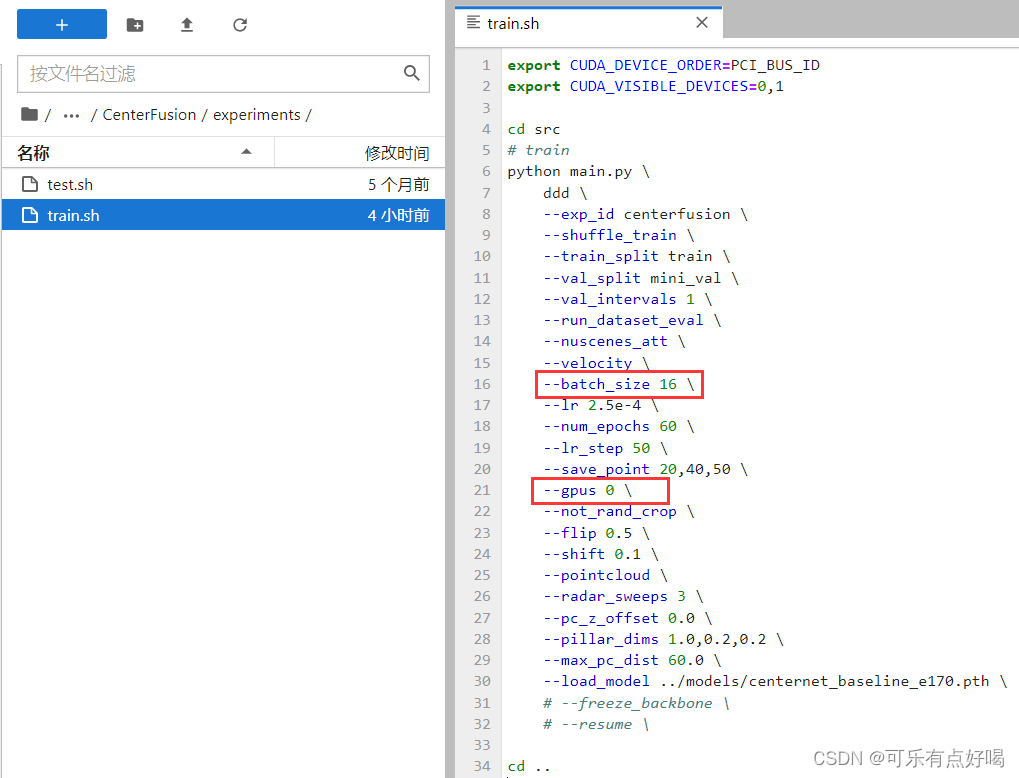
- 不过在训练之前需要修改 train.sh 中的参数。
- 我训练时报错,发现 24GB 的显存不够用,把 batch_size 改为了 16。
- 由于包里钱钱不太多
 只配置了一个 gpu,所以参数由 gpu 0,1 改为 gpu 0
只配置了一个 gpu,所以参数由 gpu 0,1 改为 gpu 0
- 在训练过程中,都会遇到如下问题,先解决后,再一次性训练成功

错误1:
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
Traceback (most recent call last):
File "test.py", line 215, in <module>
prefetch_test(opt)
File "test.py", line 73, in prefetch_test
Logger(opt)
File "/root/autodl-tmp/CenterFusion/src/lib/logger.py", line 34, in __init__
subprocess.check_output(["git", "describe", "--always"])))
File "/root/miniconda3/envs/env1/lib/python3.7/subprocess.py", line 411, in check_output
**kwargs).stdout
File "/root/miniconda3/envs/env1/lib/python3.7/subprocess.py", line 512, in run
output=stdout, stderr=stderr)
subprocess.CalledProcessError: Command '['git', 'describe', '--always']' returned non-zero exit status 128.
- 看倒数第二个 File 路径,打开 /root/miniconda3/envs/env1/lib/python3.7/subprocess.py 文件,修改第 411-1=410 行,将 check=True 改为 check=False 即可。

- 如果是其它服务器,或者没有使用虚拟环境,去找 …/lib/python3.7/subprocess.py 这样的路径,实在找不到的话可以先训练一下子,等它报错,然后看倒数第二个路径就可以很容易找到了。
错误2:
python: can't open file 'tools/nuscenes-devkit/python-sdk/nuscenes/eval/detection/evaluate.py': [Errno 2] No such file or directory
Traceback (most recent call last):
File "main.py", line 140, in <module>
main(opt)
File "main.py", line 106, in main
with open('{}/metrics_summary.json'.format(out_dir), 'r') as f:
FileNotFoundError: [Errno 2] No such file or directory: '/root/autodl-tmp/CenterFusion/src/lib/../../exp/ddd/centerfusion/nuscenes_eval_det_output_mini_val//metrics_summary.json'
- 这是由于 ~/CenterFusion/src/tools/nuscenes-devkit 这个文件夹居然是空的
 还要自己手动去下载。
还要自己手动去下载。 - 命令如下:
#在 ~/CenterFusion/src/tools 文件夹下,先删除原来的空文件夹
rm -rf nuscenes-devkit
#再下载 nuscenes-devkit
git clone https://github.com/nutonomy/nuscenes-devkit.git
-
下载失败没事,再试几次就好了。

-
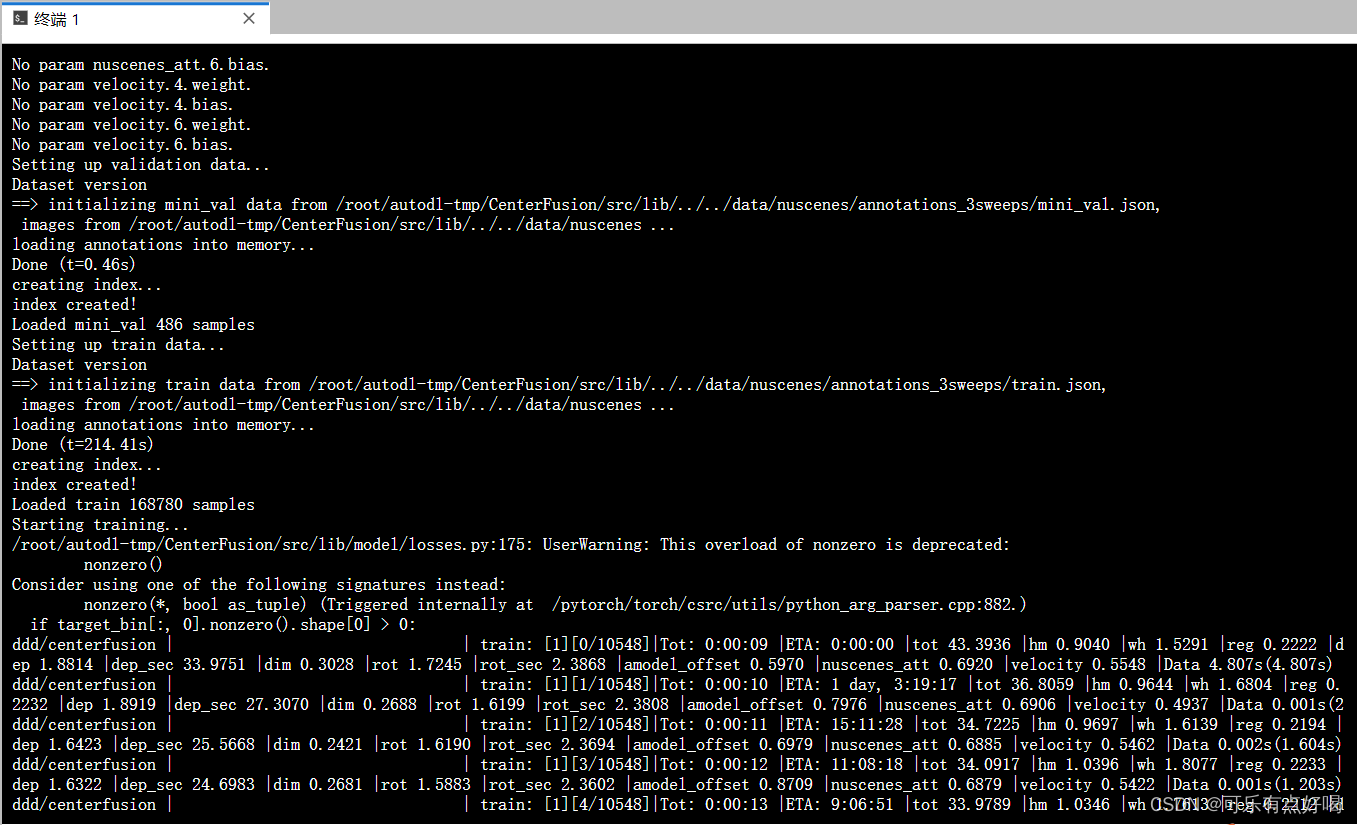
排除了第二个错误后,开始训练(可能还会遇到错误,遇到了再贴出来解决)。
cd $CF_ROOT
bash experiments/train.sh
- 如下图所示(中间的警告信息可以不用管):
- 训练结束,如下图(训练完了再贴出来):

