1、启动SITL
启动STL
cd courseRoot/apm/ardupilot/
sim_vehicle.py -v ArduCopter --console --map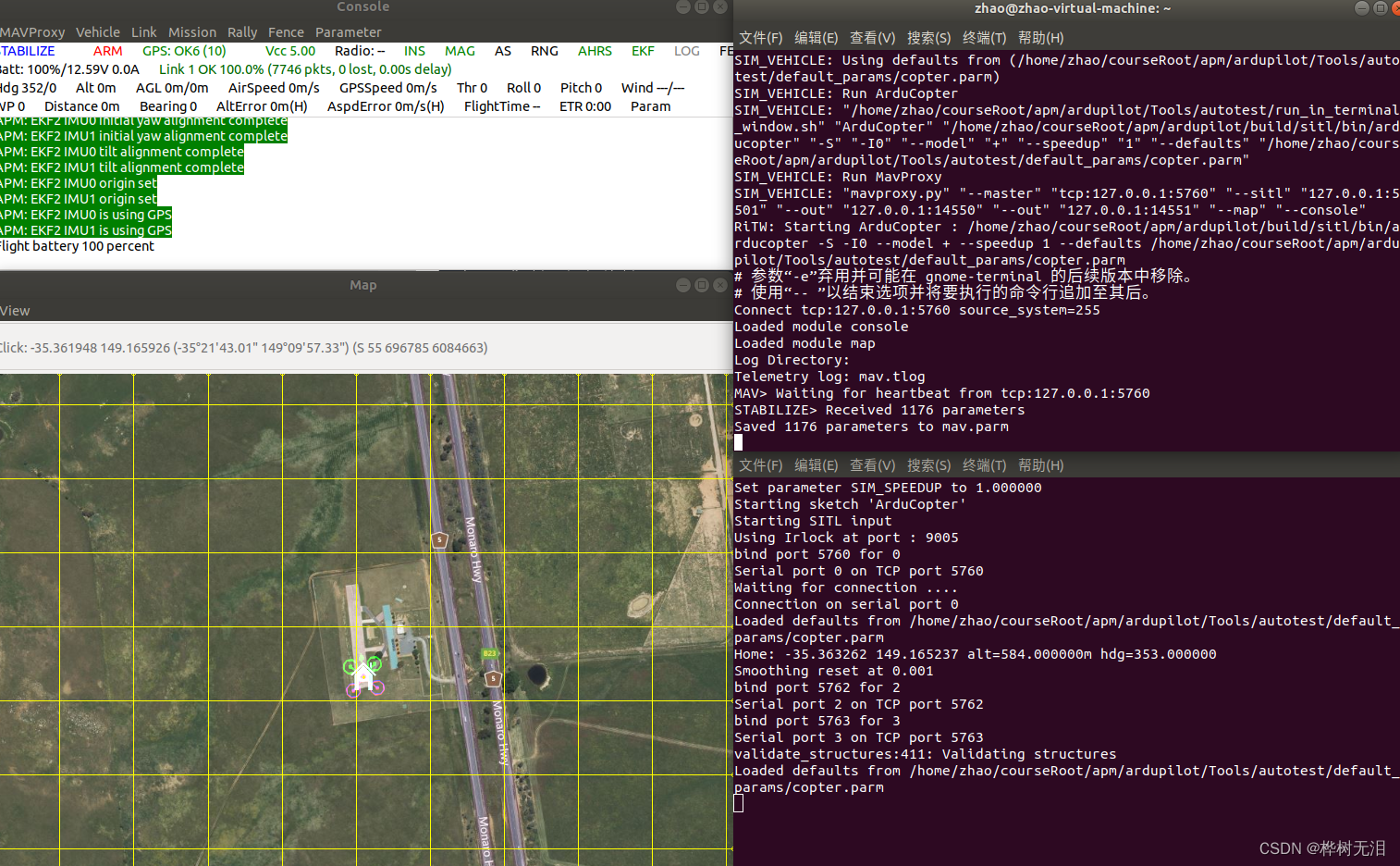
飞机起飞降落
mode GUIDED
arm throttle
takeoff 10
mode LAND
2、连接地面端
cd /courseRoot/src
./QGroundControl.AppImage  3、连接内部STIL脚本
3、连接内部STIL脚本
- 打开SITL sim_vehicle.py -v ArduCopter

可以看到STIL提供两个对外接口 127.0.0.1:14550 和14551用来连接python脚本
- python连接STIL脚本
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException
import time
import socket
import exceptions
import math
import argparse
#####FUNCTIONS#####
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
#####MAIN EXECUTABLE#####
vehicle = connectMyCopter()
python connection_template.py --connect 127.0.0.1:14550
出现上图说明连接成功
- 起飞脚本
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException
import time
import socket
import exceptions
import math
import argparse
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
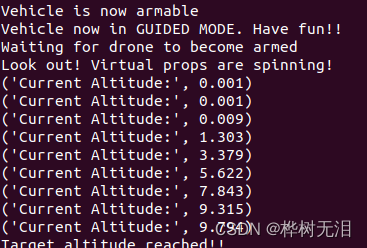
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
vehicle = connectMyCopter()
arm_and_takeoff(10)?起飞成功
4、 连接外部SITL脚本
写bash文件放到bin目录下? sudo chmod 777 launchSilt
#!/bin/bash
kill -9 $(ps -eF | grep QG | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep ardu | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep mav | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep apm | awk -F ' ' '{print $2}')>/dev/null 2>&1
#########
## Launch a Sitl drone
/home/zhao/courseRoot/apm/ardupilot/build/sitl/bin/arducopter -S -I0 --home 31.88763137,118.814176,13,0 --model "+" --speedup 1 --defaults $apm/ardupilot/Tools/autotest/default_params/copter.parm&
sleep 5
## Launch QGC
/home/zhao/courseRoot/src/QGroundControl.AppImage 2>/dev/null&
sleep 5
## Start MAVProxy
screen -dm mavproxy.py --master=tcp:127.0.0.1:5760 --out=127.0.0.1:14550 --out=127.0.0.1:5762
##Launch the dronekit-python script
/usr/bin/python "$1" --connect 127.0.0.1:5762
function finish {
kill -9 $(ps -eF | grep QG | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep ardu | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep mav | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep apm | awk -F ' ' '{print $2}')>/dev/null 2>&1
}
trap finish EXIT
------------------------------保存并退出
chmod +x launchSitl
sudo cp launchSitl /usr/local/bin/launchSitllaunchSitl basic_template.py

?launchSitl auto_mission.py
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
vehicle = connectMyCopter()
wphome = vehicle.location.global_relative_frame
cmd1 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,wphome.lat,wphome.lon,wphome.alt)
cmd2 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,31.88663137,118.812176,25)
cmd3 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,31.88563137,118.812876,25)
cmd4 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_RETURN_TO_LAUNCH,0,0,0,0,0,0,0,0,0)
cmds = vehicle.commands
cmds.download()
cmds.wait_ready()
cmds.clear()
cmds.add(cmd1)
cmds.add(cmd2)
cmds.add(cmd3)
cmds.add(cmd4)
vehicle.commands.upload()
arm_and_takeoff(10)
print("after arm and takeoff")
vehicle.mode = VehicleMode("AUTO")
while vehicle.mode != "AUTO":
time.sleep(.2)
while vehicle.location.global_relative_frame.alt > 2:
print("Drone is executing mission, but we can still run code")
time.sleep(2)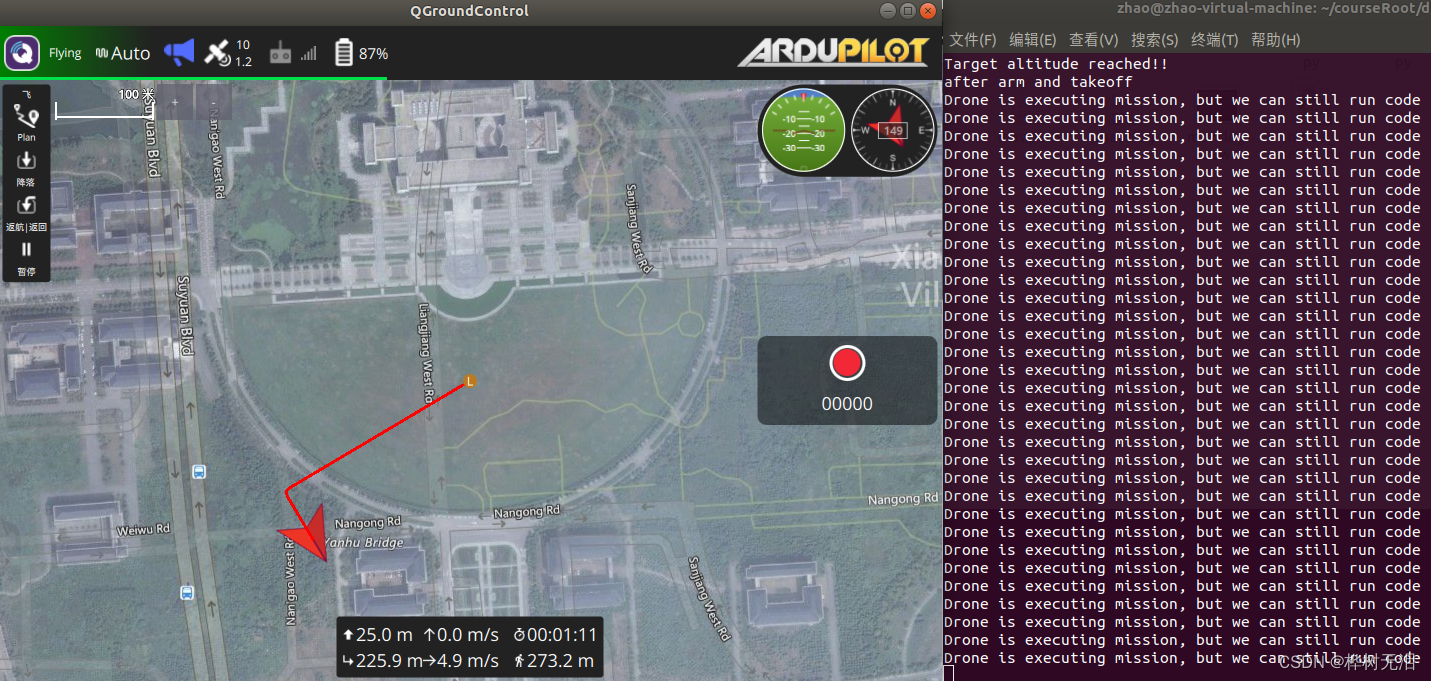
5、 控制飞行速度
全球坐标系北是正X,东是正Y ? 下是正Z
无人机坐标系 无人机正方向X? 右Y? 下Z
要在GUIDED模式下对无人机发送自定义的MAVLink指令,对于多数MAVLink指令,生成相应指令的函数为“小写指令名”+“_encode”
位掩码是一种用来定义状态的一串二进制数字,通过与目标数字串进行逻辑运算来达到控制状态的目的。位掩码可以占用很少资源实现丰富的状态标识。这里给出了三种位掩码,我们需要用表示速度的那个,也就是0b110111000111.
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
def send_global_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0,0,0,mavutil.mavlink.MAV_FRAME_BODY_OFFSET_NED,
0b110111000111,
0,0,0,
vx,vy,vz,
0,0,0,
0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
def send_local_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0,0,0,mavutil.mavlink.MAV_FRAME_LOCAL_NED,
0b110111000111,
0,0,0,
vx,vy,vz,
0,0,0,
0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
vehicle = connectMyCopter()
arm_and_takeoff(10)
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(5,0,0)
time.sleep(1)
print("Moving TRUE NORTH")
i += 1
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(0,-5,0)
time.sleep(1)
print("Moving TRUE WEST")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(5,0,0)
time.sleep(1)
print("Moving NORTH relative to front of drone")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(0,-5,0)
time.sleep(1)
print("Moving NORTH relative to front of drone")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(0,0,5)
time.sleep(1)
print("Moving DOWN")
i += 1
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(0,0,-5)
time.sleep(1)
print("Moving UP")
i += 1
while True:
time.sleep(1)6、 控制飞行方向
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
def condition_yaw(degrees, relative):
if relative:
is_relative = 1
else:
is_relative = 0
msg = vehicle.message_factory.command_long_encode(
0,0,
mavutil.mavlink.MAV_CMD_CONDITION_YAW,
0,
degrees,
0,1,
is_relative,
0,0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
vehicle = connectMyCopter()
arm_and_takeoff(10)
condition_yaw(30,1)
time.sleep(7)
condition_yaw(0,0)
time.sleep(7)
condition_yaw(270,0)
while True:
time.sleep(1)?参考

