Kalman滤波器真的太复杂了,因此整理了这篇文章,来记录一下对自己有用的一些参考链接。
如果用我自己的话来总结kalman滤波器(可能不准确):
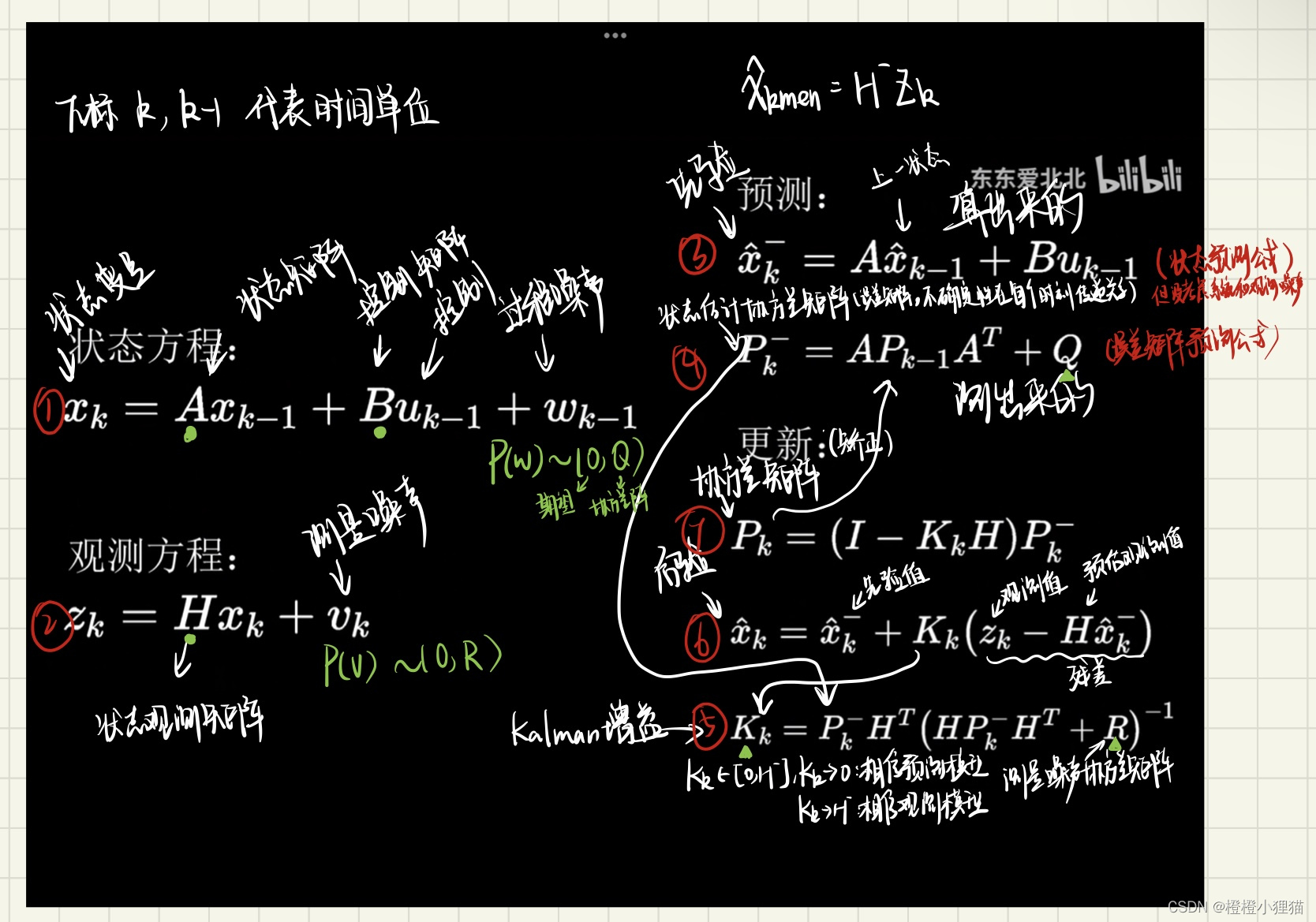
- 要观测的目标自身存在一个运动状态(状态方程);
- 在这个目标身上我安装了一些传感器(观测方程);
- 我可以通过它上一个的运动状态,来预测此时刻的位置;
- 我也可以通过传感器来直接检测出它此时刻的位置;
- 但是这个世界存在着误差,我无论预测还是检测都可能不准;
- 因此我打算将预测值和检测值数据融合一下;
- 在数据融合过程中,我更相信预测值还是检测值,那就用到卡尔曼增益(Kk);
- Kalman帮我决定更相信预测值还是检测值进行了量化,Kalman根据协方差矩阵、状态观测矩阵等写出了一个方程,让估计误差最小。
Kalman跟踪直观感受
| 链接 | 说明 |
|---|---|
| 用卡尔曼滤波器打造一个简易单目标跟踪器 |
Kalman原理
| 链接 | 说明 |
|---|---|
| 授之以渔: 卡尔曼滤波器 …大泻蜜 … | 一个段子,啥都没记住就记住了这个哈哈 |
| 【卡尔曼滤波器】1_递归算法_Recursive Processing | 对卡尔曼原理解说的视频,方便入门,也适合二刷三刷 |
| 目标跟踪之卡尔曼滤波―理解Kalman滤波的使用预测 | 对状态方程和观测方程进行了比较详细的解说。 |
| 图像处理之目标跟踪(一)之卡尔曼kalman滤波跟踪(主要为知识梳理)(转载) | 对预测和更新方程进行了比较详细的说明,但是写得比较凌乱 |
| 如何快速理解卡尔曼滤波跟踪 python 目标跟踪算法 | 对预测和更新方程进行了比较详细的说明,但是写得比较凌乱 |
Kalman应用
| 链接 | 说明 |
|---|---|
| 卡尔曼滤波在目标跟踪中的运用 | python中卡尔曼滤波的案例以及调用opencv自带库的写法 |
| 学习OpenCV2――卡尔曼滤波(KalmanFilter)详解 | 待读 |
| 使用Kalman滤波器做目标跟踪 | 待读 |
opencv官方kalman函数说明
cv::KalmanFilter Class Reference
自己写了个类
输入值为目标的中心坐标和长宽,输入预测的坐标位置和速度,可能存在部分错误,需后期修正。
import cv2
import numpy as np
# from myUtils.utils import xyxy_to_xywh
class KalmanTrack:
def __init__(self):
# 状态数和观测数需要修改
self.kalman = cv2.KalmanFilter(6, 4) # 6:状态数,包括(xmin,ymin,xmax,ymax, dx,dy)坐标及速度(每次移动的距离);
# 4:观测量,能看到的是坐标值
# 状态转移矩阵
A = np.array([[1, 0, 0, 0, 1, 0],
[0, 1, 0, 0, 0, 1],
[0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 1]], np.float32)
self.kalman.transitionMatrix = A # 状态转移矩阵
# 控制矩阵
B = None
self.kalman.controlMatrix = B
# 状态观测矩阵
H = np.array([[1, 0, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0],
[0, 0, 0, 1, 0, 0]], np.float32)
self.kalman.measurementMatrix = H # 系统测量矩阵
# 观测噪声协方差矩阵R,p(v)~N(0,R)
# 观测噪声来自于检测框丢失、重叠等
R = np.array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]], np.float32)
self.kalman.measurementNoiseCov = R
# 过程噪声协方差矩阵Q,p(w)~N(0,Q),噪声来自真实世界中的不确定性,
# 在跟踪任务当中,过程噪声来自于目标移动的不确定性(突然加速、减速、转弯等)
Q = np.eye(6, dtype=np.float32) * 0.1
self.kalman.processNoiseCov = Q
# 状态估计协方差矩阵P初始化
P = np.eye(6, dtype=np.float32)
self.kalman.errorCovPre = P
self.cur_measurement = np.nan
self.cur_prediction = np.nan
self.pre_measurement = np.nan
self.pre_prediction = np.nan
def get_cur_state(self, target_box):
"""获取初始值状态测量值"""
# target_box = [729, 238, 764, 339]
self.cur_measurement = target_box # 目标初始bouding box
# self.cur_measurement = xyxy_to_xywh(self.cur_measurement)
# [中心x,中心y,宽w,高h]
self.cur_measurement = np.array(
[[np.float32(self.cur_measurement[0]), np.float32(self.cur_measurement[1]),
np.float32(self.cur_measurement[2]), np.float32(self.cur_measurement[3])]]).T
return self.cur_measurement
def get_initial_state(self, target_box):
self.cur_measurement = self.get_cur_state(target_box)
self.pre_measurement = self.cur_measurement
self.cur_prediction = self.cur_measurement
self.pre_prediction = self.cur_measurement
def correct_and_predict(self, target_box):
# 将前线状态进行存储
self.pre_measurement = self.cur_measurement
self.pre_prediction = self.cur_prediction
# 用当前测量来校正卡尔曼滤波器
self.cur_measurement = self.get_cur_state(target_box)
self.kalman.correct(self.cur_measurement) # 用当前测量来校正卡尔曼滤波器
self.cur_prediction = self.kalman.predict() # 计算卡尔曼预测值,作为当前预测
return self.cur_prediction
if __name__ == '__main__':
kalman_tracker = KalmanTrack()
kalman_tracker.get_initial_state([729, 288, 35, 101]) # xywh
while True:
# 将先前的预测值作为当前的测量值
data = list([kalman_tracker.pre_prediction[0][0], kalman_tracker.pre_prediction[1][0],
kalman_tracker.pre_prediction[2][0], kalman_tracker.pre_prediction[3][0]])
print(kalman_tracker.correct_and_predict(data))