Ŀ¼
��������:PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
���ĵ�ַ:https://arxiv.org/abs/1809.03531
�����ַ:https://github.com/gsartoretti/PRIMAL
�������:���˼�ʻ��̬���ϲ��Ե��� | �����˶�̬���ϲ��� | ���˹켣Ԥ�� | �����˵���,��ƪǿ��ѧϰ���ڶ�������·���滮������
1. ������
1.1 ���û���:
- ���½�һ������:
conda create --name PRIMAL python=3.6 - �½�һ��
requirements.txt�ļ�,��Ҫ��װ�İ����Ž�ȥ,������pip install -r requirements��װ��:
Cython==0.28.4
gym==0.9.4
Tensorflow==1.13.0
numpy==1.16.0
matplotlib
imageio
tk
networkx
ע:Դ��������python3.4 + tf 1.3 + numpy 1.13,������Ϊ�ҵ�pycharm�汾�ϸ�,���ܼ��ݵͰ汾python,����������python 3.6;py3.6������1.3�汾��tensorflow,������ֻ�����1.13�汾��tf��
3. �����װʧ��,Ҳ����һ��һ����װ(�Ҳ��õķ���)
ע:ֱ��pip����conda��װ����gymʱ,���Գ����������ַ���:conda install -c conda-forge gym=0.9.4 ���� pip install gym -i https://pypi.tuna.tsinghua.edu.cn/simple
��װtensorflow������ʱ,����ִ���������� conda install cudatoolkit=10.0 conda install tensorflow==1.13.1
4. ��װ��ɺ�,����ʹ��conda list�������Ƿ�װ����:
1.2 ���Դ���
-
��װ
readme�ļ��еIJ���һ��һ����:
�� �����д��ڽ���cd od_mstar3�ļ���,python setup.py build_ext --inplace;������error: Unable to find vcvarsall.bat
��������һ��,��������Ҫ��װVisual Studio,�����ڰ�װʱ��Ҫ��ѡ C++����������װʱû�й�ѡ,Ӧ���ڹ����������°�װ,֮����������vcvarsallģ���ˡ��ο�����:�Ѱ�װvs2017 ��Ȼ����Unable to find vcvarsall.bat -
Ȼ��,װ��֮���DZ��� o(�i�n�i)o,����:����error: Unable to find vcvarsall.bat,�ҽ�
msvc9compiler.py�ļ��е�find_vcvarsall����return�ij�return r"C:\Program Files (x86)\Microsoft Visual Studio\2017\Community\VC\Auxiliary\Build\vcvarsall.bat"
���������:Unable to find vcvarsall.bat? -
�ĺ�
vcvarsall.bat��bug��,������һ����bug:fatal error C1083: �������ļ�: ��boost/graph/graph_traits.hpp��: No such file or directory�� ���ϲ���һ��,����C++���BGL��,��Ҫ�Լ����ذ�װ��Ѱ·ʱ���õ�����Boost C++ Libraries ���밲װ,oost���ذ�װ��������ʹ��ָ��(��Windows��Linux)
�� ��������������boost_1_53_.zip,��ѹ����bootstrap.bat��ʱ���� boost ����ʱ��������:Failed to build Boost.Build engine�������˺ܶ�����,����û���,���Ǿ����������°汾��boost���߰���
��װʱ�ٴα���,fatal error C1083: �������ļ�: ��corecrt.h,Windows ԭ�� cmd �����±��� C++(cl����)���ֵ����⼰��������� ���Ѱ�װ��Visual Studio 2022,�ܹ�˳��װ��boost,�����Ҳ���°�װ��vs2022����!���ڿ�����!!
1.3 linux������װboost:
!!!!linux����ֱ��ʹ��sudo apt-get install boost����Ϳ���װ��! https://stackoverflow.com/questions/12578499/how-to-install-boost-on-ubuntu
2.�������:
2.1 setup.py
�������ߵ�Ҫ��,Ӧ������������ļ�~
setup.py�ǵ���cpython,�� Python �����ϱ�д Python �� C/C++ ����,���� Python �ٶ�
���� C/C++ ���� �̳�,Cython �����÷� ��
��������������cpython_od_matar.pyx����ļ�,���е�find_path(world, init_pos, goals, inflation, time_limit)������ʹ��ODrM�㷨����̽����ODrM�൱��ר��,generate a high-quality paths��
�������:
world - matrix specifying obstacles, 1 for obstacle, 0 for free
init_pos - [[x, y], ...] specifying start position for each robot
goals - [[x, y], ...] specifying goal position for each robot
inflation - inflation factor for heuristic
time_limit - time until failure in seconds
returns:
[[[x1, y1], ...], [[x2, y2], ...], ...] path in the joint
configuration space
2.2 A3C_RNN.py
��Ϊpycharm�ڷ���������jupyter�ļ��е��鷳,�ҽ�DRLMAPF_A3C_RNN.ipynb�ļ��ij���A3C_RNN.py�ļ����ⲿ�ָ���ѵ��ģ��
2.3 ACNet.py
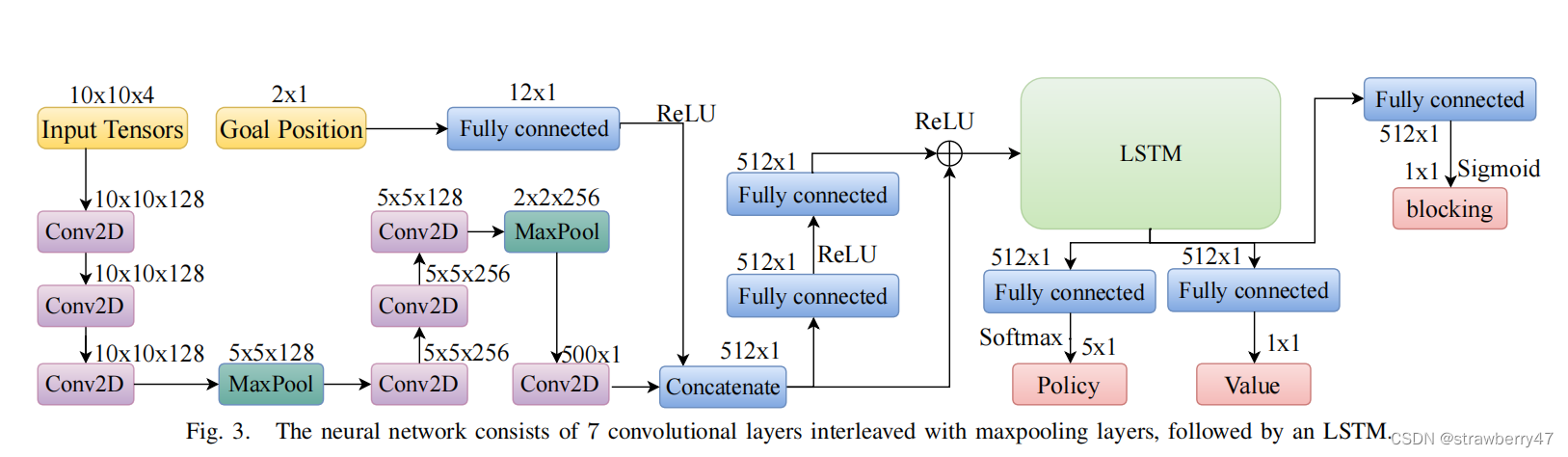
ACNet.py�е�_build_net()������Ӧ�������е�����ṹ:
2.4 mapf_gym����
2.4.1 mapf_gym��mapf_gym_cap����
�̳���gym��,���ڴ����
��ֵ���,����mapf_gym_cap.py�д��뼸��һ��,ֻ��_observe()������̫һ��:
mapf_gym��������mag(agent����goal��λ��)�Ĵ�С,Ӧ�þ�����Ұ���ް�:

github�ж��������ļ��Ľ�����:
mapf_gym:Multi-agent path planning gym environment, in which agents learn collective path planning
mapf_gym_cap.py:Multi-agent path planning gym environment, with capped goal distance state value for validation in larger environments
����һ�´���,ѵ����ʱ����õ���mapf_gym,���Ե�ʱ����mapf_gym_cap.py
ֱ����������������ᱨ��NameError: name 'coordinationRatio' is not defined,û�鵽coordinationRatio��������Ǹ�ʲô��,�ҾͰѶ�Ӧ�Ĵ���print(coordinationRatio(env))ע�͵��ˡ�
2.4.2 �����
A3C_RNN.py�������:gym=mapf_gym.MAPFEnv(num_agents=n, world0=world[0],goals0=world[1])
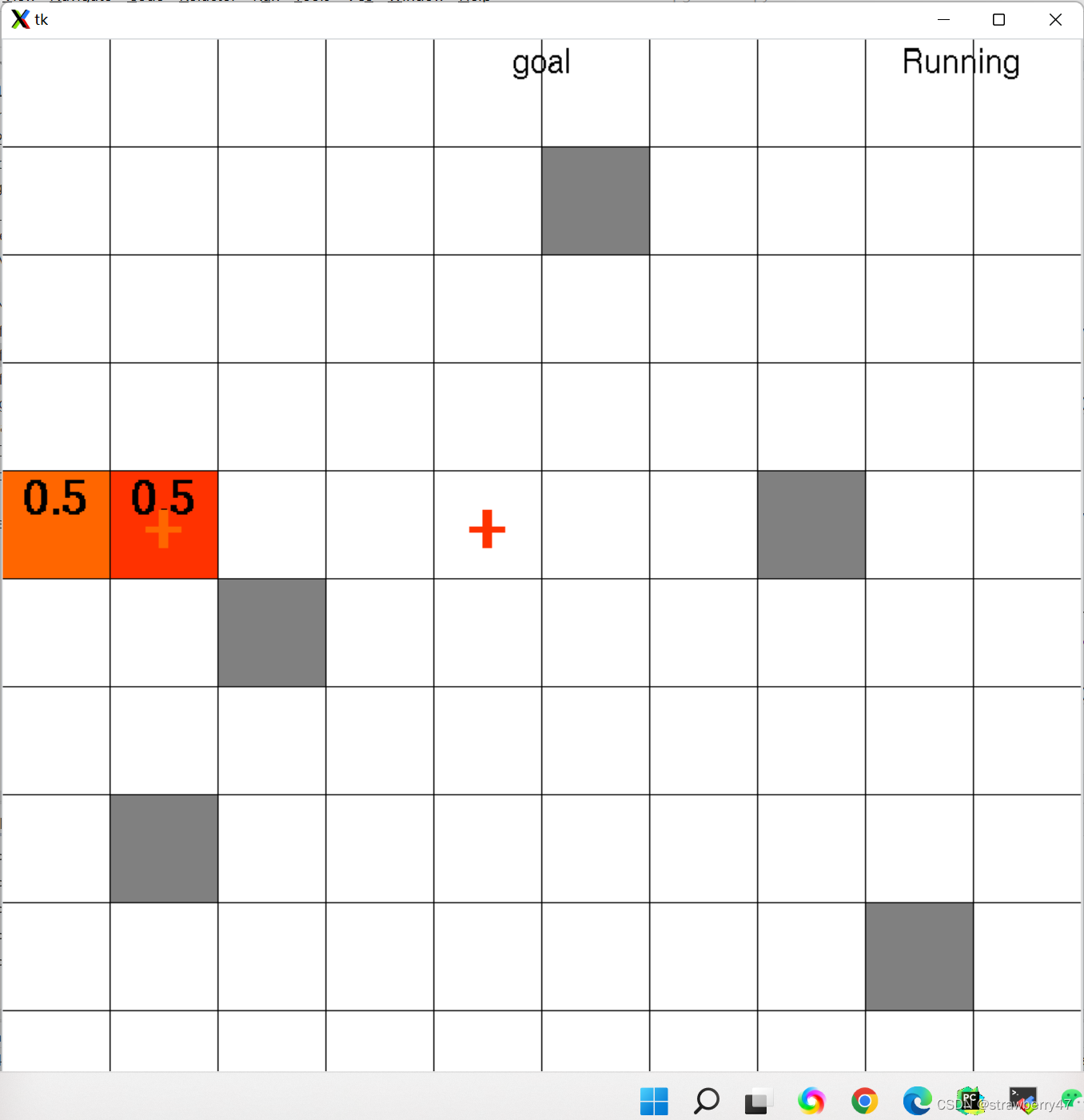
2.5 mapgenerator.py
����tk()��,���ɻ���,���ֶ�����obstacle,agent��λ��
2.6 primal_testing.py
����ģ��,���в���,����[Errno 2] No such file or directory: 'saved_environments/4_agents_10_size_0_density_id_0_environment.npy',û�ҵ��������������ļ�ѽ��
2.7 unittest
����:pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to "None",����˵ֱ�����ն��ܾ�����
But,���ն���,Ҳ����your graphic drives do not support OpenGL 2.0,���ϲ���һ��,����GPU���С�
�� �����������:��������ʽ��ͼ����Ⱦ��ʽ��server���������⻯��ͼ����Ⱦ;û���á�����
�� ���������pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to ��None�� ,װ��һ�뷢��Ҳ��ҪGPU����
���¿��˿�����,��������һ��ʼ��ע�͵���from gym.envs.classic_control import rendering �����,������Ҳע�͵��ˡ����� ����ע�͵�֮��,�Ϳ�����ͼ�λ������˰���
GroupLock.py
������߳�:
Python���̱߳��(һ):threading ģ�� Thread ����÷����
Python ���̱߳��(��):threading ģ���� Lock ����÷����
��python�����threadingģ��:Condition���ʹ��(��)
3.�����ϼ�:
- ���� Connection to Python debugger failed: Socket operation on nonsocket: configureBlocking
ImportError: DLL load failed: �Ҳ���ָ����ģ�顣����취:���°�װnumpy��tensorflow- ����
mapgenerator.py����ʱ����:TclError: no display name and no $DISPLAY environment variable,����취 �ֶ�ָ����ʾ�豸: �� �ն�����printenv grep DISPLAY,�鿴�汾,����������localhost:10.0;�� �ٽ�root = Tk()�ij�root = Tk(screenName = ':10.0')�� import�IJ��ּ���import matplotlib,matplotlib.use('Agg')