����
������˹������ͼ��ѧ����mesh�ij��÷���,���ٶ�mesh�Ķ���,�ڱ仯ǰ��,�����������˹����Ӧ����һ�µġ�
�����������˹����Ķ�������:
L
=
D
?
A
=
D
(
I
?
D
?
1
A
)
L = D- A \\ =D(I - D^{-1}A)
L=D?A=D(I?D?1A)
D��ÿ������Ķ�,A���ڽӾ���
�����б���ǰ�Ķ���ΪV,��L*V,������,���Է��־�����ÿ������
i
i
i�Ķ���λ�ü�ȥ���ڵĶ���λ��*(1/
d
i
d_i
di?)��
L
V
i
=
V
i
?
��
j
��
N
i
1
d
i
V
j
LV_i = V_i - \sum_{j\in N_i} \frac{1}{d_i}V_j
LVi?=Vi??j��Ni?��?di?1?Vj?
j�Ƕ���i���ڽӶ���������
���,������˹�����б����˶���ľֲ���Ϣ��������Χ�Ĺ�ϵͨ�����ַ�ʽ��¼������
����,ͨ������ʹ�ù�һ����������˹����,��
I
?
D
?
1
A
I - D^{-1}A
I?D?1A,ÿһ��֮��Ϊ1.
������˹�������ԭ��
Ϊ�˼�����,����ȫ����2d������Ϊʵ�����
��:
- ����ǰ�Ķ��� V �� R n �� 2 V \in R^{n \times 2} V��Rn��2
- ê��A:�����˼����������λ�á�
��:
- ���κ�Ķ���λ�� V �� V' V��
���,������˹����������Կ���,��֪������״,��ָ��һЩ���������µ�λ����,������δ֪�����λ��,��Ҫ�����ж����ڱ仯ǰ���������˹����һ�¡�����������Ż�Ŀ��:
arg?min
?
V
��
�O
�O
L
V
��
?
L
V
�O
�O
+
�O
�O
V
ָ��
��
?
A
�O
�O
\operatorname{arg\,min}_V' || LV' - LV|| + ||V'_{ָ��} - A||
argminV��?�O�OLV��?LV�O�O+�O�OVָ����??A�O�O
��LV����b1,A����b2,��Ϊ
arg?min
?
V
��
�O
�O
L
V
��
?
b
1
�O
�O
+
�O
�O
V
ָ��
��
?
b
2
�O
�O
\operatorname{arg\,min}_V' ||LV' - b1|| + ||V'_{ָ��} - b2||
argminV��?�O�OLV��?b1�O�O+�O�OVָ����??b2�O�O
��ʽΪAX-b���Ż�����,����С���˷�����С���˾��кܶ�ⷨ�ˡ�
��������,��Ϊ����ʽ�ӵ��Ż�������V��,������ǿ�����������:
�O
�O
{
L
�O
B
}
V
��
?
{
L
V
�O
A
}
�O
�O
||\{L | B\} V' - \{LV | A\} ||
�O�O{L�OB}V��?{LV�OA}�O�O
|����ƴ�ӷ���,���������̡�B��һ���������,��Ϊ��ʵ��ê�����֪����,��
V
��
=
A
V' = A
V��=A,���B��ÿһ��ֻ��һ��1,1��λ�ö�Ӧһ��δ֪��,��δ֪����ê���Ӧ��λ�á�
Pythonʵս
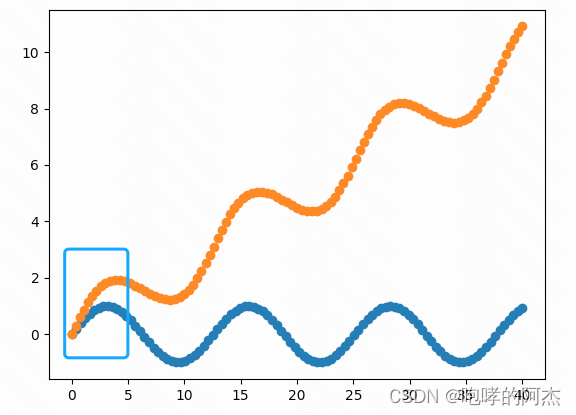
����������һ��2d�㼯,����ɫ����,anchor��(��ɫ�ĵ�)�ֱ��Ӧ����ɫ���ڱ��κ����ʼλ�ú���ֹλ�á�
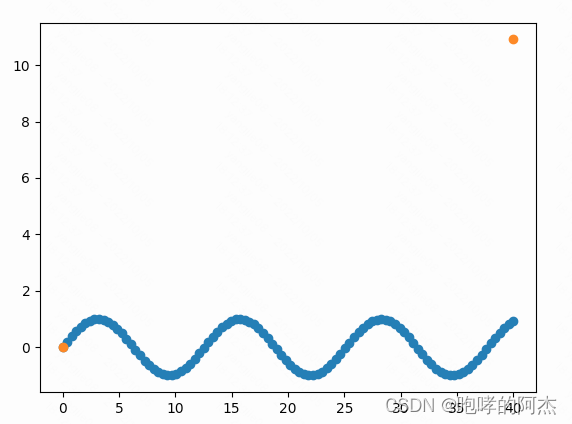
���������λ�á�
import numpy as np
from scipy.sparse import coo_matrix, block_diag
from scipy.sparse.linalg import lsqr
from collections import defaultdict
# https://github.com/SecretMG/Laplacian-Mesh-Deformation
class LaplacianDeformation:
def __init__(self, vps, faces) -> None:
self.vps = vps
self.faces = faces
self.adj_info = self.get_adj_info()
self.mode = 'mean'
self.dim = vps.shape[1]
def get_adj_info(self):
adj_dic = defaultdict(set)
for idx, face in enumerate(self.faces):
for f in face:
adj_dic[idx].add(f)
return adj_dic
def get_Ls_matrix(self, anchor_ids, anchor_weight=None):
k = anchor_ids.shape[0]
n = self.vps.shape[0]
# ����ϡ�����,������ʹ��np.zeros���θ�ֵ
data = []
I = [] # �����
J = [] # �����
for i in range(n):
neighbors = [v for v in self.adj_info[i]] # ids
degree = len(neighbors)
# data += [degree] + [-1] * degree # D-A
data += [1] + [-1 / degree] * degree # (I - D^{-1}A)
I += [i] * (degree + 1)
J += [i] + neighbors
# Ϊ��anchor���ӵķ�����,����˳�������
for i in range(k):
if anchor_weight is None:
data += [1]
else:
data += [anchor_weight[i]]
I += [n+i]
J += [anchor_ids[i]]
# [coco_matrix] https://blog.csdn.net/kittyzc/article/details/126077002
Ls = coo_matrix((data, (I, J)), shape=(n+k, n)).todense()
return Ls
def solve(self, anchors, anchor_ids):
k = anchor_ids.shape[0]
n = self.vps.shape[0]
Ls = self.get_Ls_matrix(anchor_ids)
print(Ls)
delta = Ls.dot(self.vps) # n+k, dim
# print(delta.shape);exit()
# Ϊ��k�е�ԭʼ����������Ϊanchor������(����Ϊ��Ϊָ������֪����)
for i in range(k):
delta[n+i] = anchors[i]
# update mesh vertices with least-squares solution
res = np.zeros((n, self.dim))
delta = np.array(delta)
for i in range(self.dim):
# res[:, i] = lsqr(Ls, delta[:, i])[0] # n,
res[:, i] = np.linalg.pinv(Ls).dot(delta[:, i])
return res
if __name__ == '__main__':
import matplotlib.pyplot as plt
x = np.linspace(0, 40, 100)
y = np.sin(0.5*x)
anchor_ids = np.array([100, 1]) - 1
anchors = np.array([x[-1], y[-1]+10, x[0], y[0]]).reshape(-1, 2)
vps = np.stack((x, y), axis=1) # n, 2
faces = []
for idx in range(len(x)):
if idx == 0:
faces.append((idx+1,))
elif idx == (len(x)-1):
faces.append((idx-1,))
else:
faces.append((idx-1, idx+1))
model = LaplacianDeformation(vps, faces)
new_pnts = model.solve(anchors, anchor_ids)
plt.scatter(x, y)
plt.scatter(new_pnts[:, 0], new_pnts[:, 1])
plt.show()
��������һЩgithub����,�Ѿ���ע������
�������Ӧ����3d����,����ҪһЩ�ġ�
������ת��������˹����
��һ��չʾ��������˹������һ������,����������漰����ת�仯���߽�����ת�ı仯,������״һ��,����������˹�����Ѿ������˱仯��
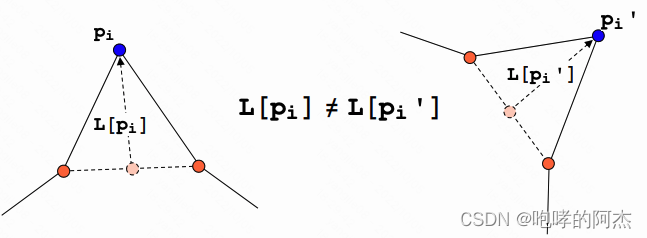
���,��Laplacian Surface Editingԭ�������л��ᵽ��һ�ָ�ȷ��������˹���η�����
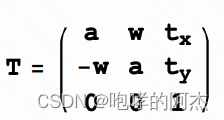
���ȼ���ÿ���������ת���DZȽ�С,����ת�������Ϊһ������ʽ,
Ȼ��Ҫ����תǰ���������˹������ͬ,��Լ�����:
arg?max
?
V
��
�O
�O
L
V
��
?
T
L
V
�O
�O
+
�O
�O
V
ָ��
��
?
A
�O
�O
\operatorname{arg\,max}_V' || LV' - TLV|| + ||V'_{ָ��} - A||
argmaxV��?�O�OLV��?TLV�O�O+�O�OVָ����??A�O�O
T����ת����Ϊ����T,����T����ⷽ��Ϊ
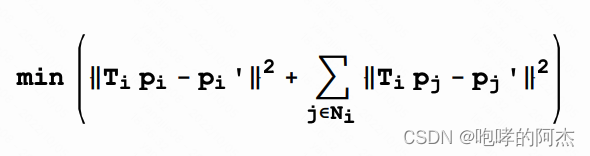
ͨ����ⷢ��,T��V�������Թ�ϵ,������V�������Է��̱�ʾ,���Ŵ���Լ������,ʹ����С���˷���⼴�ɡ�
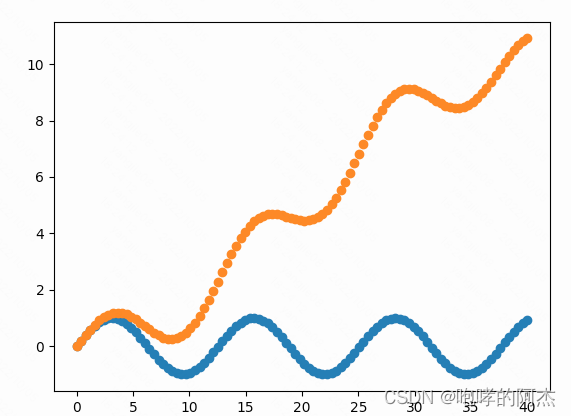
�õ��Ľ������ͼ��ʾ,���Է�����������߸��ӱ�����ԭʼ���������ߵĻ��ȡ�
# https://github.com/luost26/laplacian-surface-editing
class LaplacianDeformationWithT(LaplacianDeformation):
def __init__(self, vps, faces) -> None:
super().__init__(vps, faces)
self.extra_A = None
def get_Ls_matrix(self):
n = self.vps.shape[0]
# ����ϡ�����,������ʹ��np.zeros���θ�ֵ
data = []
I = [] # �����
J = [] # �����
for i in range(n):
neighbors = [v for v in self.adj_info[i]] # ids
degree = len(neighbors)
# data += [degree] + [-1] * degree # D-A
data += [1] + [-1 / degree] * degree # (I - D^{-1}A)
I += [i] * (degree + 1)
J += [i] + neighbors
Ls = coo_matrix((data, (I, J)), shape=(n, n)).todense()
return Ls
def solve(self, anchors, anchor_ids, anchor_weight=1):
k = anchor_ids.shape[0]
n = self.vps.shape[0]
Ls = self.get_Ls_matrix() # n, n
delta = Ls.dot(self.vps) # n, dim
LS = np.zeros([self.dim*n, self.dim*n])
for idx in range(self.dim):
LS[idx*n:(idx+1)*n, idx*n:(idx+1)*n] = (-1) * Ls
# [
# [s, -w],
# [w, s],
# ]
for idx in range(n):
neighbors = [v for v in self.adj_info[idx]] # ids
ring = np.array([idx] + neighbors)
V_ring = self.vps[ring]
n_ring = V_ring.shape[0]
A = np.zeros((n_ring * self.dim, 4))
for j in range(n_ring):
A[j] = [V_ring[j,0], -V_ring[j,1], 1, 0]
A[j+n_ring] = [V_ring[j,1], V_ring[j,0], 0, 1]
# A[j+2*n_ring] = [V_ring[j,2], V_ring[j,1], -V_ring[j, 0], 0 , 0, 0, 1]
inv_A = np.linalg.pinv(A) # 4, n_ring*2
s = inv_A[0]
w = inv_A[1]
T_delta = np.stack(
[
delta[idx, 0] * s - delta[idx, 1] * w,
delta[idx, 0] * w + delta[idx, 1] * s
], axis=0
) # 2, 2*n_ring
LS[idx, np.hstack([ring, ring+n,])] += T_delta[0]
LS[idx+n, np.hstack([ring, ring+n])] += T_delta[1]
constraint_coef = []
constraint_b = []
for idx in range(k):
vps_idx = anchor_ids[idx]
tmp_coeff_x = np.zeros((self.dim * n))
tmp_coeff_x[vps_idx] = anchor_weight
tmp_coeff_y = np.zeros((self.dim * n))
tmp_coeff_y[vps_idx+n] = anchor_weight
constraint_coef.append(tmp_coeff_x)
constraint_coef.append(tmp_coeff_y)
constraint_b.append(anchor_weight * anchors[idx, 0])
constraint_b.append(anchor_weight * anchors[idx, 1])
constraint_coef = np.matrix(constraint_coef)
constraint_b = np.array(constraint_b)
A = np.vstack([LS, constraint_coef])
b = np.hstack([np.zeros(self.dim * n), constraint_b])
spA = coo_matrix(A).todense()
# ����ʱ��֤shapeΪ��ά
V_prime = lsqr(spA, b)[0]
# V_prime = np.linalg.lstsq(spA, b.reshape(-1, 1), rcond=None)[0]
# V_prime = np.linalg.pinv(spA).dot(b)
new_pnts = []
for idx in range(n):
new_pnts.append(list(V_prime[idx + i*n] for i in range(self.dim)))
new_pnts = np.array(new_pnts)
return new_pnts
�ο�
һ�������ѧ�μ�
��������˹�������-Siggraph 2004
����ѧ�༭3Dģ��(һ)- Mesh Deformation with Laplacian Coordinates
github C++
github Python
ͼ�������ͼ����ѧϰ�ʼ�(��)������˹����������
Laplacian Deformation on 2D/3D Mesh Editing ����ϸ���Ƶ�
������˹���κ�����һЩ�Ľ�����,���ĵ�ַΪ