一、DDP实现分布式并行训练要括? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ??
Pytorch并行主要有两种方式,DataParallel(DP)和DistributedDataParallel(DDP)。DP方式较为简单,但是多线程训练,并且主卡显存占用比其他卡会多很多。因此这里采用DDP方式来多卡计算。
DDP是多进程,将模型复制到多块卡上计算,数据分配较均衡。
?1?使用DDP的一机多卡配置
1. 加入local_rank参数,这一步会在代码运行时通过torch.distributed.launch输入,该参数意义是当前进程所用的是哪块卡:
|
2. 初始化,设置pytorch支持的通讯后端,GPU的通讯采用nccl:
|
3. 模型封装
|
4. 数据分配
train_sampler = DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=args.batch_size, shuffle=False, num_workers=args.workers, pin_memory=True, sampler=train_sampler)在定义DataLoader的时候,要把shuffle设置为False,并输入采样器sampler:
?2?完整的例子(main.py)
import argparse
import os
import shutil
import time
import warnings
import numpy as np
warnings.filterwarnings('ignore')
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.distributed as dist
import torch.optim
import torch.utils.data
import torch.utils.data.distributed
from torch.utils.data.distributed import DistributedSampler
from models import DeepLab
from dataset import Cityscaples
parser = argparse.ArgumentParser(description='DeepLab')
parser.add_argument('-j', '--workers', default=4, type=int, metavar='N',
help='number of data loading workers (default: 4)')
parser.add_argument('--epochs', default=100, type=int, metavar='N',
help='number of total epochs to run')
parser.add_argument('--start-epoch', default=0, type=int, metavar='N',
help='manual epoch number (useful on restarts)')
parser.add_argument('-b', '--batch-size', default=3, type=int,
metavar='N')
parser.add_argument('--local_rank', default=0, type=int, help='node rank for distributed training')
args = parser.parse_args()
torch.distributed.init_process_group(backend="nccl") # 初始化
print("Use GPU: {} for training".format(args.local_rank))
# create model
model = DeepLab()
torch.cuda.set_device(args.local_rank) # 当前卡
model = model.cuda() # 模型放在卡上
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank], output_device=args.local_rank, find_unused_parameters=True) # 数据并行
criterion = nn.CrossEntropyLoss().cuda()
optimizer = torch.optim.SGD(model.parameters(), args.lr, momentum=args.momentum, weight_decay=args.weight_decay)
train_dataset = Cityscaples()
train_sampler = DistributedSampler(train_dataset) # 分配数据
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=args.batch_size, shuffle=False, num_workers=args.workers, pin_memory=True, sampler=train_sampler) #shuffle要设置为False通过命令行启动:
|
- CUDA_VISIBLE_DEVICES设置要利用的GPU卡号
- --nproc_per_node设置几块卡
- 参数中一定要加入 --local_rank
二、详情求真? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
其实单机多卡的办法还有很多:
1、nn.DataParallel?简单方便的 nn.DataParallel
2、torch.distributed?使用 torch.distributed 加速并行训练
3、apex?使用 apex 再加速。
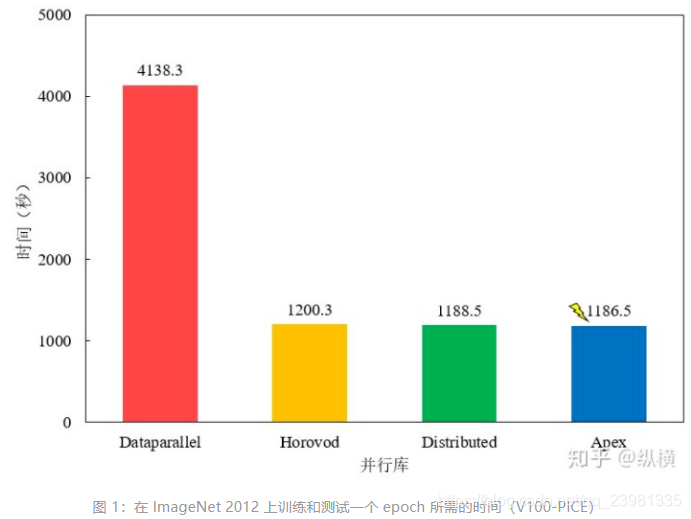
这里,记录了使用 4 块 Tesla V100-PICE 在 ImageNet 进行了运行时间的测试,测试结果发现?Apex 的加速效果最好,但与 Horovod/Distributed 差别不大,平时可以直接使用内置的 Distributed。Dataparallel 较慢,不推荐使用。
?1 使用nn.DataParallel并行训练
先问两个问题:
问1:为啥非要单机多卡?
答1:加速神经网络训练最简单的办法就是上GPU,如果一块GPU还是不够,就多上几块。事实上,比如BERT和GPT-2这样的大型语言模型甚至是在上百块GPU上训练的。为了实现多GPU训练,我们必须想一个办法在多个GPU上分发数据和模型,并且协调训练过程。
问2:上一篇讲得单机多卡操作nn.DataParallel,哪里不好?
答2:要回答这个问题我们得先简单回顾一下nn.DataParallel,要使用这玩意,我们将模型和数据加载到多个 GPU 中,控制数据在 GPU 之间的流动,协同不同 GPU 上的模型进行并行训练。具体怎么操作?我们只需要用 DataParallel 包装模型,再设置一些参数即可。需要定义的参数包括:
-
参与训练的 GPU 有哪些,device_ids=gpus。
-
用于汇总梯度的 GPU 是哪个,output_device=gpus[0] 。
DataParallel 会自动帮我们将数据切分 load 到相应 GPU,将模型复制到相应 GPU,进行正向传播计算梯度并汇总:
model = nn.DataParallel(model.cuda(), device_ids=gpus, output_device=gpus[0])?值得注意的是,模型和数据都需要先 load 进 GPU 中,DataParallel 的 module 才能对其进行处理,否则会报错:
# main.py
import torch
import torch.distributed as dist
gpus = [0, 1, 2, 3]
torch.cuda.set_device('cuda:{}'.format(gpus[0]))
train_dataset = ...
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=...)
model = ...
model = nn.DataParallel(model.to(device), device_ids=gpus, output_device=gpus[0])
optimizer = optim.SGD(model.parameters())
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
稍微解释几句: model.to(device)将模型迁移到GPU里面; images.cuda(non_blocking=True),target.cuda(non_blocking=True)把数据迁移到GPU里面; nn.DataParallel(model.to(device), device_ids=gpus, output_device=gpus[0])包装模型。 images.cuda(non_blocking=True)为何要设置参数non_blocking=True呢? 解释:non_blocking默认值为False, 通常我们会在加载数据时,将DataLoader的参数pin_memory设置为True, DataLoader中参数pin_memory的作用是:将生成的Tensor数据存放在哪里,值为True时,意味着生成的Tensor数据存放在锁页内存中,这样内存中的Tensor转义到GPU的显存会更快。 主机中的内存,有两种存在方式,一是锁页,二是不锁页,锁页内存存放的内容在任何情况下都不会与主机的虚拟内存进行交换(注:虚拟内存就是硬盘),而不锁页内存在主机内存不足时,数据会存放在虚拟内存中。显卡中的显存全部是锁页内存,当计算机的内存充足的时候,可以设置pin_memory=True。当系统卡住,或者交换内存使用过多的时候,设置pin_memory=False。(参考:链接) 如果pin_memory=True的话,将数据放入GPU的时候,也应该把non_blocking打开,这样就只把数据放入GPU而不取出,访问时间会大大减少。
?nn.DataParallel 的缺点:
-
单进程多线程。在每个训练批次(batch)中,因为模型的权重都是在一个进程上先算出来,然后再把他们分发到每个GPU上,所以网络通信就成为了一个瓶颈,而GPU使用率也通常很低。
-
除此之外,nn.DataParallel 需要所有的GPU都在一个节点(一台机器)上,且并不支持 Apex 的 混合精度训练。
-
一句话总结:一个进程算权重使通信成为瓶颈,nn.DataParallel慢而且不支持混合精度训练。
?2 使用 torch.distributed 及nn.DistributedDataParallel加速并行训练:
DataParallel:单进程控制多 GPU。
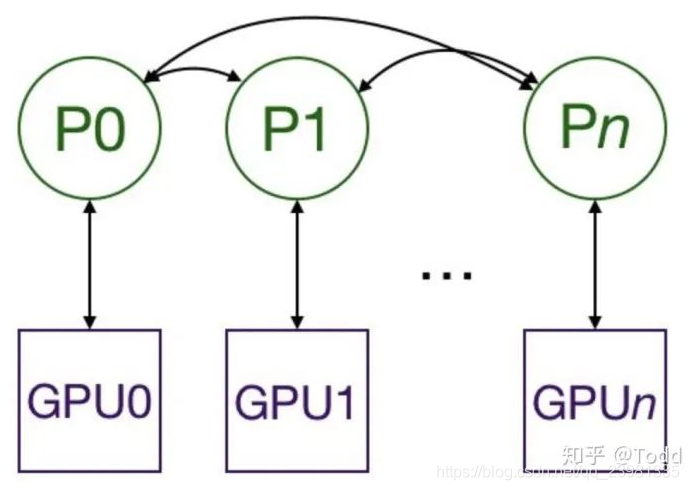
DistributedDataParallel:多进程控制多 GPU,一起训练模型。
2.1 介绍
在 1.0 之后,官方终于对分布式的常用方法进行了封装,支持 all-reduce,broadcast,send 和 receive 等等。通过 MPI 实现 CPU 通信,通过 NCCL 实现 GPU 通信。官方也曾经提到用?DistributedDataParallel?解决 DataParallel 速度慢,GPU 负载不均衡的问题,目前已经很成熟了。与 DataParallel 的单进程控制多 GPU 不同,在 distributed 的帮助下,我们只需要编写一份代码,torch 就会自动将其分配给个进程,分别在
个 GPU 上运行。
?和单进程训练不同的是,多进程训练需要注意以下事项:
-
在喂数据的时候,一个batch被分到了好几个进程,每个进程在取数据的时候要确保拿到的是不同的数据(
DistributedSampler); -
要告诉每个进程自己是谁,使用哪块GPU(
args.local_rank); -
在做Batch Normalization的时候要注意同步数据,即进行跨卡同步批归一化。
2.2 使用方式
(1)启动方式的改变
在多进程的启动方面,我们不用自己手写 multiprocess 进行一系列复杂的CPU、GPU分配任务,PyTorch为我们提供了一个很方便的启动器?torch.distributed.launch?用于启动文件,所以我们运行训练代码的方式就变成了这样:
CUDA_VISIBLE_DEVICES=0,1,2,3 python \-m torch.distributed.launch \--nproc_per_node=4 main.py其中的?--nproc_per_node?参数用于指定为当前主机创建的进程数,由于我们是单机多卡,所以这里node数量为1,所以我们这里设置为所使用的GPU数量即可。
(2)初始化
在启动器为我们启动python脚本后,在执行过程中,启动器会将当前进程的(其实就是 GPU的)index 通过参数传递给 python,我们可以这样获得当前进程的 index:即通过参数?local_rank?来告诉我们当前进程使用的是哪个GPU,用于我们在每个进程中指定不同的device:
def parse():
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', type=int, default=0,help='node rank for distributed training')
args = parser.parse_args()
return args
def main():
args = parse()
torch.cuda.set_device(args.local_rank)
torch.distributed.init_process_group(
'nccl',
init_method='env://'
)
device = torch.device(f'cuda:{args.local_rank}')
...其中 torch.distributed.init_process_group?用于初始化GPU通信方式(NCCL)和参数的获取方式(env代表通过环境变量)。即使用 init_process_group 设置GPU之间通信使用的后端和端口,通过 NCCL 实现 GPU 通信。
(3)DataLoader
在读取数据的时候,我们要保证一个batch里的数据被均摊到每个进程上,每个进程都能获取到不同的数据,但如果我们手动去告诉每个进程拿哪些数据的话太麻烦了,PyTorch也为我们封装好了这一方法。之后,使用?DistributedSampler 对数据集进行划分。如此前我们介绍的那样,它能帮助我们将每个 batch 划分成几个 partition,在当前进程中只需要获取和 rank 对应的那个 partition 进行训练。所以我们在初始化?data loader?的时候需要使用到?torch.utils.data.distributed.DistributedSampler?这个特性:
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=..., sampler=train_sampler)?这样就能给每个进程一个不同的 sampler,告诉每个进程自己分别取哪些数据。
(3)模型的初始化
和?nn.DataParallel?的方式一样,我们对于模型的初始化也是简单的一句话就行了:
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank])使用 DistributedDataParallel 包装模型,它能帮助我们为不同 GPU 上求得的梯度进行 all reduce(即汇总不同 GPU 计算所得的梯度,并同步计算结果)。all reduce 后不同 GPU 中模型的梯度均为 all reduce 之前各 GPU 梯度的均值。
(4)同步批归一化(?𝒔𝒚𝒏𝒄𝒉𝒓𝒐𝒏𝒊𝒛𝒆𝒅?𝑩𝒂𝒕𝒄𝒉 𝑵𝒐𝒓𝒎𝒂𝒍𝒊𝒛𝒂𝒕𝒊𝒐𝒏?)
为何要进行同步BN呢?现有的标准 Batch Normalization 因为使用数据并行(Data Parallel),是单卡的实现模式,只对单个卡上对样本进行归一化,相当于减小了批量大小(batch-size)。对于比较消耗显存的训练任务时,往往单卡上的相对批量过小,影响模型的收敛效果。之前在我们在图像语义分割的实验中,Jerry和我就发现使用大模型的效果反而变差,实际上就是BN在作怪。跨卡同步 Batch Normalization 可以使用全局的样本进行归一化,这样相当于‘增大‘了批量大小,这样训练效果不再受到使用 GPU 数量的影响。最近在图像分割、物体检测的论文中,使用跨卡BN也会显著地提高实验效果,所以跨卡 BN 已然成为竞赛刷分、发论文的必备神器。
可惜 PyTorch 并没有为我们实现这一功能,在接下来的介绍中我们会在?apex?中看到这一功能。
2.3 汇总
至此,我们就可以使用 torch.distributed 及nn.DistributedDataParallel给我们带来的多进程训练的性能提升了,汇总代码结果如下:
# main.py
import torch
import argparse
import torch.distributed as dist
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', default=-1, type=int,
help='node rank for distributed training')
args = parser.parse_args()
dist.init_process_group(backend='nccl')
torch.cuda.set_device(args.local_rank)
train_dataset = ...
#每个进程一个sampler
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=..., sampler=train_sampler)
model = ...
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank])
optimizer = optim.SGD(model.parameters())
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
...
optimizer.zero_grad()
loss.backward()
optimizer.step()
在使用时,调用 torch.distributed.launch 启动器启动:
CUDA_VISIBLE_DEVICES=0,1,2,3 python -m torch.distributed.launch --nproc_per_node=4 main.py
在 ImageNet 上的完整训练代码,请点击:https://github.com/tczhangzhi/pytorch-distributed/blob/master/distributed.py
??3. 使用 apex 再加速(混合精度训练、并行训练、同步BN)
3.1 apex介绍
注:需要使用到
Volta结构的GPU,目前只有Tesla V100和TITAN V系列支持。Apex 是 NVIDIA 开源的用于混合精度训练和分布式训练库。Apex 对混合精度训练的过程进行了封装,改两三行配置就可以进行混合精度的训练,从而大幅度降低显存占用,节约运算时间。此外,Apex 也提供了对分布式训练的封装,针对 NVIDIA 的 NCCL 通信库进行了优化。
混合精度训练是在尽可能减少精度损失的情况下利用半精度浮点数加速训练。它使用FP16即半精度浮点数存储权重和梯度。在减少占用内存的同时起到了加速训练的效果。总结下来就是两个原因:内存占用更少,计算更快。
-
内存占用更少:这个是显然可见的,通用的模型 fp16 占用的内存只需原来的一半。memory-bandwidth 减半所带来的好处:
- 模型占用的内存更小,训练的时候可以用更大的batchsize。模型训练时,通信量(特别是多卡,或者多机多卡)大幅减少,大幅减少等待时间,加快数据的流通。
-
计算更快
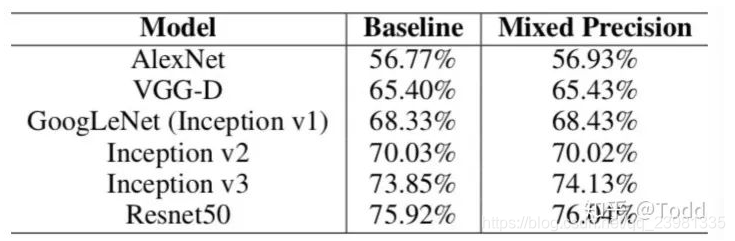
- 目前的不少GPU都有针对 fp16 的计算进行优化。论文指出:在近期的GPU中,半精度的计算吞吐量可以是单精度的 2-8 倍;从下图我们可以看到混合精度训练几乎没有性能损失。
3.2 使用方式
在混合精度训练上,Apex 的封装十分优雅。直接使用?amp.initialize?包装模型和优化器,apex 就会自动帮助我们管理模型参数和优化器的精度了,根据精度需求不同可以传入其他配置参数。
from apex import amp
model, optimizer = amp.initialize(model, optimizer, opt_level='O1')
其中 opt_level 为精度的优化设置,O0(第一个字母是大写字母O):
O0:纯FP32训练,可以作为accuracy的baseline;
O1:混合精度训练(推荐使用),根据黑白名单自动决定使用FP16(GEMM, 卷积)还是FP32(Softmax)进行计算。
O2:“几乎FP16”混合精度训练,不存在黑白名单,除了Batch norm,几乎都是用FP16计算。
O3:纯FP16训练,很不稳定,但是可以作为speed的baseline;
(2) 并行训练
Apex也实现了并行训练模型的转换方式,改动并不大,主要是优化了NCCL的通信,因此代码和 torch.distributed 保持一致,换一下调用的API即可:
from apex import amp
from apex.parallel import DistributedDataParallel
model, optimizer = amp.initialize(model, optimizer, opt_level='O1')
model = DistributedDataParallel(model, delay_allreduce=True)
# 反向传播时需要调用 amp.scale_loss,用于根据loss值自动对精度进行缩放
with amp.scale_loss(loss, optimizer) as scaled_loss:
scaled_loss.backward()(3)同步BN
Apex为我们实现了同步BN,用于解决单GPU的minibatch太小导致BN在训练时不收敛的问题。
from apex.parallel import convert_syncbn_model
from apex.parallel import DistributedDataParallel
# 注意顺序:三个顺序不能错
model = convert_syncbn_model(UNet3d(n_channels=1, n_classes=1)).to(device)
model, optimizer = amp.initialize(model, optimizer, opt_level='O1')
model = DistributedDataParallel(model, delay_allreduce=True)调用该函数后,Apex会自动遍历model的所有层,将BatchNorm层替换掉。
3.3 汇总
Apex的并行训练部分主要与如下代码段有关:
# main.py
import torch
import argparse
import torch.distributed as dist
from apex.parallel import convert_syncbn_model
from apex.parallel import DistributedDataParallel
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', default=-1, type=int,
help='node rank for distributed training')
args = parser.parse_args()
dist.init_process_group(backend='nccl')
torch.cuda.set_device(args.local_rank)
train_dataset = ...
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=..., sampler=train_sampler)
model = ...
#同步BN
model = convert_syncbn_model(model)
#混合精度
model, optimizer = amp.initialize(model, optimizer)
#分布数据并行
model = DistributedDataParallel(model, device_ids=[args.local_rank])
optimizer = optim.SGD(model.parameters())
for epoch in range(100):
for batch_idx, (data, target) in enumerate(train_loader):
images = images.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
...
output = model(images)
loss = criterion(output, target)
optimizer.zero_grad()
with amp.scale_loss(loss, optimizer) as scaled_loss:
scaled_loss.backward()
optimizer.step()
使用 launch 启动:
CUDA_VISIBLE_DEVICES=0,1,2,3 python -m torch.distributed.launch --nproc_per_node=4 main.py?4 多卡训练时的数据记录(TensorBoard、torch.save)
4.1 记录Loss曲线
在我们使用多进程时,每个进程有自己计算得到的Loss,我们在进行数据记录时,希望对不同进程上的Loss取平均(也就是 map-reduce 的做法),对于其他需要记录的数据也都是一样的做法:
def reduce_tensor(tensor):
# Reduces the tensor data across all machines
# If we print the tensor, we can get:
# tensor(334.4330, device='cuda:1') *********************, here is cuda: cuda:1
# tensor(359.1895, device='cuda:3') *********************, here is cuda: cuda:3
# tensor(263.3543, device='cuda:2') *********************, here is cuda: cuda:2
# tensor(340.1970, device='cuda:0') *********************, here is cuda: cuda:0
rt = tensor.clone() # The function operates in-place.
dist.all_reduce(rt, op=dist.reduce_op.SUM)
rt /= dist.get_world_size()#总进程数
return rt
# calculate loss
loss = criterion(predict, labels)
reduced_loss = reduce_tensor(loss.data)
train_epoch_loss += reduced_loss.item()
'''
注意在写入TensorBoard的时候只让一个进程写入就够了:
'''
# TensorBoard
if args.local_rank == 0:
writer.add_scalars('Loss/training', {
'train_loss': train_epoch_loss,
'val_loss': val_epoch_loss
}, epoch + 1)4.2 torch.save保存模型
在保存模型的时候,由于是Apex混合精度模型,我们需要使用Apex提供的保存、载入方法(见Apex README):
# Save checkpoint
checkpoint = {
'model': model.state_dict(),
'optimizer': optimizer.state_dict(),
'amp': amp.state_dict()
}
torch.save(checkpoint, 'amp_checkpoint.pt')
...
# Restore
model = ...
optimizer = ...
checkpoint = torch.load('amp_checkpoint.pt')
model, optimizer = amp.initialize(model, optimizer, opt_level=opt_level)
model.load_state_dict(checkpoint['model'])
optimizer.load_state_dict(checkpoint['optimizer'])
amp.load_state_dict(checkpoint['amp'])
# Continue training
...
?5 多卡后的 batch_size 和 learning_rate 的调整
从理论上来说,lr = batch_size * base lr,因为 batch_size 的增大会导致你 update 次数的减少,所以为了达到相同的效果,应该是同比例增大的。但是更大的 lr 可能会导致收敛的不够好,尤其是在刚开始的时候,如果你使用很大的 lr,可能会直接爆炸,所以可能会需要一些 warmup 来逐步的把 lr 提高到你想设定的 lr。实际应用中发现不一定要同比例增长,有时候可能增大到 batch_size/2 倍的效果已经很不错了。在我的实验中,使用8卡训练,则增大batch_size 8倍,learning_rate 4倍是差不多的。
?6 完整代码示例(Apex混合精度的Distributed DataParallel,用来训练3D U-Net的)
import os
import datetime
import argparse
from tqdm import tqdm
import torch
from torch import distributed, optim
from torch.utils.data import DataLoader
#每个进程不同sampler
from torch.utils.data.distributed import DistributedSampler
from torch.utils.tensorboard import SummaryWriter
#混合精度
from apex import amp
#同步BN
from apex.parallel import convert_syncbn_model
#Distributed DataParallel
from apex.parallel import DistributedDataParallel
from models import UNet3d
from datasets import IronGrain3dDataset
from losses import BCEDiceLoss
from eval import eval_net
train_images_folder = '../../datasets/IronGrain/74x320x320/train_patches/images/'
train_labels_folder = '../../datasets/IronGrain/74x320x320/train_patches/labels/'
val_images_folder = '../../datasets/IronGrain/74x320x320/val_patches/images/'
val_labels_folder = '../../datasets/IronGrain/74x320x320/val_patches/labels/'
def parse():
parser = argparse.ArgumentParser()
parser.add_argument('--local_rank', type=int, default=0)
args = parser.parse_args()
return args
def main():
args = parse()
#设置当前进程的device,GPU通信方式为NCCL
torch.cuda.set_device(args.local_rank)
distributed.init_process_group(
'nccl',
init_method='env://'
)
#制作Dataset和sampler
train_dataset = IronGrain3dDataset(train_images_folder, train_labels_folder)
val_dataset = IronGrain3dDataset(val_images_folder, val_labels_folder)
train_sampler = DistributedSampler(train_dataset)
val_sampler = DistributedSampler(val_dataset)
epochs = 100
batch_size = 8
lr = 2e-4
weight_decay = 1e-4
device = torch.device(f'cuda:{args.local_rank}')
#制作DataLoader
train_loader = DataLoader(train_dataset, batch_size=batch_size, num_workers=4,
pin_memory=True, sampler=train_sampler)
val_loader = DataLoader(val_dataset, batch_size=batch_size, num_workers=4,
pin_memory=True, sampler=val_sampler)
#3步曲:同步BN,初始化amp,DistributedDataParallel封装
net = convert_syncbn_model(UNet3d(n_channels=1, n_classes=1)).to(device)
optimizer = optim.Adam(net.parameters(), lr=lr, weight_decay=weight_decay)
net, optimizer = amp.initialize(net, optimizer, opt_level='O1')
net = DistributedDataParallel(net, delay_allreduce=True)
scheduler = optim.lr_scheduler.MultiStepLR(optimizer, milestones=[25, 50, 75], gamma=0.2)
criterion = BCEDiceLoss().to(device)
if args.local_rank == 0:
print(f'''Starting training:
Epochs: {epochs}
Batch size: {batch_size}
Learning rate: {lr}
Training size: {len(train_dataset)}
Validation size: {len(val_dataset)}
Device: {device.type}
''')
writer = SummaryWriter(
log_dir=f'runs/irongrain/unet3d_32x160x160_BS_{batch_size}_{datetime.datetime.now()}'
)
for epoch in range(epochs):
train_epoch_loss = 0
with tqdm(total=len(train_dataset), desc=f'Epoch {epoch + 1}/{epochs}', unit='img') as pbar:
images = None
labels = None
predict = None
# train
net.train()
for batch_idx, batch in enumerate(train_loader):
images = batch['image']
labels = batch['label']
images = images.to(device, dtype=torch.float32)
labels = labels.to(device, dtype=torch.float32)
predict = net(images)
# calculate loss
# reduce不同进程的loss
loss = criterion(predict, labels)
reduced_loss = reduce_tensor(loss.data)
train_epoch_loss += reduced_loss.item()
# optimize
optimizer.zero_grad()
with amp.scale_loss(loss, optimizer) as scaled_loss:
scaled_loss.backward()
optimizer.step()
scheduler.step()
# set progress bar
pbar.set_postfix(**{'loss (batch)': loss.item()})
pbar.update(images.shape[0])
train_epoch_loss /= (batch_idx + 1)
# eval
val_epoch_loss, dice, iou = eval_net(net, criterion, val_loader, device, len(val_dataset))
# TensorBoard
if args.local_rank == 0:
writer.add_scalars('Loss/training', {
'train_loss': train_epoch_loss,
'val_loss': val_epoch_loss
}, epoch + 1)
writer.add_scalars('Metrics/validation', {
'dice': dice,
'iou': iou
}, epoch + 1)
writer.add_images('images', images[:, :, 0, :, :], epoch + 1)
writer.add_images('Label/ground_truth', labels[:, :, 0, :, :], epoch + 1)
writer.add_images('Label/predict', torch.sigmoid(predict[:, :, 0, :, :]) > 0.5, epoch + 1)
if args.local_rank == 0:
torch.save(net, f'unet3d-epoch{epoch + 1}.pth')
def reduce_tensor(tensor: torch.Tensor) -> torch.Tensor:
rt = tensor.clone()
distributed.all_reduce(rt, op=distributed.reduce_op.SUM)
rt /= distributed.get_world_size()#进程数
return rt
if __name__ == '__main__':
main()