How to Build a Graph-Based Deep Learning Architecture in Traffic Domain: A Survey
1. ���¸���
1.1 ������Ҫ����
- �������ȸ�������ͼ�Ľ�ͨ����Ĺ�ʽ,���Ӹ��ֽ�ͨ���ݼ�����ͼ��
- �ֽ���Щ����ͼ�ļܹ�,��������ʹ�õ����ѧϰ����,����ÿ�ּ��������������е�Ӧ��
- �ܽ���һЩ������������ս�Լ���Ӧ�Ļ���ͼ�����ѧϰ�������
- �ṩ�˻����ݼ�����Դ�����δ�����о�����
1.2 ������Ԥ�������һЩ����
-
����ͳ��ѧ�ķ���:ͳ��ѧ�������ڶ�����������ƽ�ȵļ���,�ü��費����ʵ��,ʹ��Ч������
-
���ڴ�ͳ����ѧϰ:��ͳ����ѧϰ����dz��Ľ���ͷ���ѧϰ�ķ���������������Ч������,����Ҫ�ֹ����������ڴ����ݻ����²�̫���á�
-
�������ѧϰ����:��Ҫ��CNN+RNN,ʹ��CNN���ռ�����,ʹ��RNN��ʱ���������������ڽ�ͨ������ʱ�������ͨ����ͼ�ṹ��,����ʹ��CNN��������ѵġ�
-
����ͼ������:�������еĹ�����GNNs��ϵ����ѧϰ�ܹ���,�Բ��ռ�������,�ұ��ֳ����õ�
1.3 ��ս�ͼ����ع�
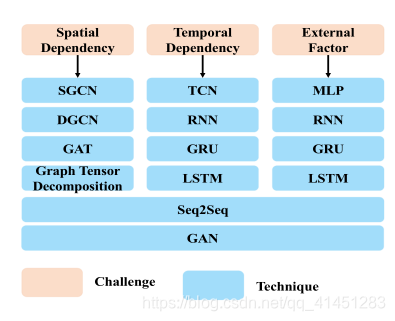
��Ҫ��ս:ʱ��Ϳռ������ԵIJ����ⲿ����
ʱ��������:��Ԥ��һ�������Ľ�ͨ״��ʱ��Ҫ������Χ�����Ľ�ͨ״������һ��ʱ��εĽ�ͨ״��
���������:��ڼ��ա�����������Ҳ��Խ�ͨԤ�����Ӱ��
2. ͼ�Ĺ���
2.1 �ڵ㼰�ڵ������Ĺ���
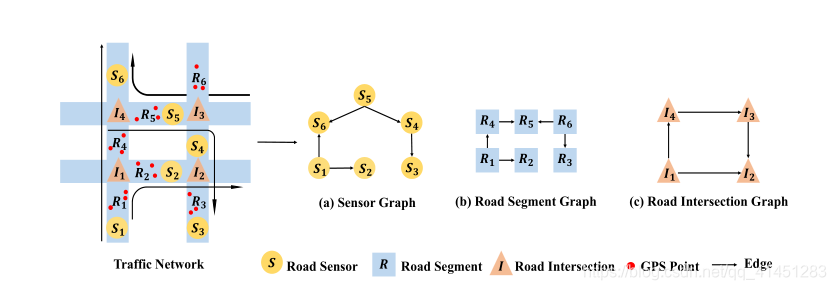
(1)�ڵ�ͽڵ���������:
- Sensors Datasets:���������ݿ��Ϊ����
- A sensor graph:����������һ���ڵ�,�ýڵ�������������Ӧ�Ĵ������ռ�����������ֵ
- **A road segment graph **:һ��·�δ���һ���ڵ�,�ýڵ�������Ƕ�Ӧ·�����д�������ƽ����ͨ����ֵ
- GPS Datasets:ȫ��λϵͳ�켣���ݼ�ͨ������һ������ij��ʱ���ڵij���������ɵġ�
- A road segment graph:����·�δ���һ���ڵ�,�ýڵ�������������Ӧ·���ϵ�����GPS���¼��ƽ����ͨ����ֵ
- A road intersection graph:���е�·����ڴ���һ���ڵ�,�ýڵ��������ͨ�����Ľ�ͨ�������ܺ�
- Rail-hailing Datasets :��Щ���ݼ���¼�˸�������һ��ʱ���ڵ�����/���/���г����������������ݽ����з��̴�С��ȵ�����,ÿ���������һ����,ÿ����������Ǹ���ʱ��������Ӧ�����еĶ�������
- Transactions Datasets:��Щ���ݼ��ɲ����ڹ�����ͨ����(����������������)�е��Զ��ۼ�Ʊϵͳ�ռ���ÿ����վ����Ϊһ���ڵ�,��վ������ͨ�������뿪�ij˿�������
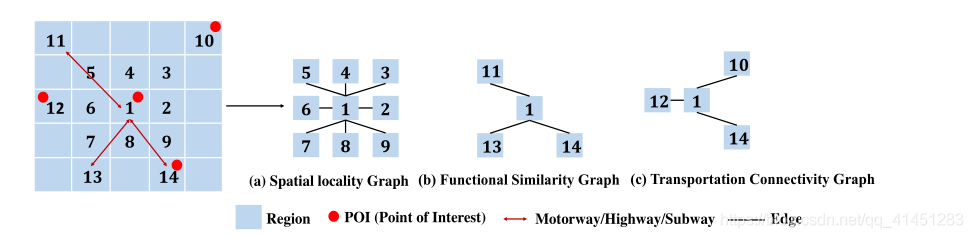
(2)�ڽӾ�����
Fixed Matrix:���������ڵ�֮���������ǹ̶���,��������ʱ����ı䡣���,�����һ���̶��ľ���,����������ʵ������б��ֲ��䡣
- Distance matrix:���ݼ��ξ�������ڵ�֮��Ľӽ��ȡ���Щ����ʹ����ֵ��˹���������ڽӾ���,����dijΪ��������,
a i j = { exp ? ( ? d i j 2 �� 2 ) , i �� j ?and? d i j �� ? 0 , i = j ?or? d i j < ? \mathbf{a}_{i j}=\left\{\begin{array}{l} \exp \left(-\frac{\mathbf{d}_{i j}^{2}}{\sigma^{2}}\right), i \neq j \text { and } \mathbf{d}_{i j} \geq \epsilon \\ 0, i=j \text { or } \mathbf{d}_{i j}<\epsilon \end{array}\right. aij?={exp(?��2dij2??),i��?=j?and?dij?��?0,i=j?or?dij?<??
- Functional similarity matrix :���������ڵ��ڹ������Ƿ�����,�������ƹ��ܵĵ������������Ƶ�����ģʽ,�����ھ�����ͬ��Ȥ�������֮�佨����(�˴������и�����ͼӦ���Ǹ�����)
- Transportation connectivity matrix:����ңԶ���ǽ�ͨ���������֮��(��ͨ����)Ӧ�ý���
Dynamic Matrix:������ȱ�ݵ�����֪ʶ������������,Ԥ�������һ����ӳ�ڵ�֮�������������ϵ����һЩʵ�����Ѿ�֤���þ����ܸ��õIJ����صĿռ���������������Ӧ����ͨ�����ݽ���ѧϰ��
Evolving Matrix:��ijЩ�����,ͼ�νṹ������ʱ������ƶ��ݱ䡣���������˽ṹ����ϵ�ģ�����Բ����ֶ�̬�ռ�仯��
3. ���ѧϰ�����ع�
3.1 GNN:
�ڽ�ͨԤ��������Ҫʹ�õ���ConvGNNs,ConvGNNs��Ҫ�����־�������һ���ǻ��������۵�ͼ����,һ���ǻ��ڿռ��ͼ���������ڿռ��ͼ�������������Ҫ������ʹ����ɢ������spectral graph convolution (SGC)ֻ����������ͼ��, diffusion graph convolution (DGC) �ȿ�����������ͼҲ������������ͼ��
3.1.1 spectral-based convolutions
���ֳ���������˹����:(1)$ L=D-A$ (2) L = D ? 1 / 2 L D ? 1 / 2 = I ? D ? 1 / 2 A D ? 1 / 2 L=D^{-1/2}LD^{-1/2}=I-D^{-1/2}AD^{-1/2} L=D?1/2LD?1/2=I?D?1/2AD?1/2 (3) L = D ? 1 L L=D^{-1}L L=D?1L
Ϊʲôʹ��������˹����:(1)������˹�����ǶԳƾ�����Խ��������ֽ� (2)���ھ����ڸ���Ҷ�������Լ�,Ϊ����graph��������Ҷ�任��Ҫ�ҵ���������������Ӧ�ڸ���Ҷ�任�Ļ�,���Ҫʹ��������˹�������������
�ɾ�������:���������ĸ���Ҷ�任�Ǻ�������Ҷ�任�ij˻�,���Զ�ͼ������f�;�����g���Ա�ʾΪ f ? g = U ( ( U T g ) ( U T f ) ) f*g=U((U^Tg)(U^Tf)) f?g=U((UTg)(UTf)) ����� U T g U^Tg UTg����һ������ �� \theta ������д�� f ? g = U �� U T f f*g=U{\Theta}U^Tf f?g=U��UTf������ǻ��������۵ľ�������,�������ֲ�����ʱ�临�Ӷ�Ϊ O ( N 2 ) O(N^2) O(N2)̫����ʱ��
��֮��ĸĽ���Defferrard et alͨ���� �� \Theta ������Ϊ �� = �� i = 1 K ? 1 �� k �� K \Theta=\sum_{i=1}^{K-1}\theta_k\Lambda^K ��=��i=1K?1?��k?��K,���������ʽ���Ա�ʾΪ �� k = 0 K ? 1 �� k U �� U T x = �� k = 0 K ? 1 �� k L k x \sum_{k=0}^{K-1}\theta_kU\Lambda U^Tx=\sum_{k=0}^{K-1}\theta_kL^kx ��k=0K?1?��k?U��UTx=��k=0K?1?��k?Lkx,��ͨ��Chebyshev����ʽ T k ( x ) T_k(x) Tk?(x)�ƽ� L k L_k Lk?���վ�����ʽΪ: �� k = 0 K ? 1 �� k T k ( L ~ ) x \sum_{k=0}^{K-1}\theta_kT_k(\tilde{L})x ��k=0K?1?��k?Tk?(L~)x,���� L ~ = 2 �� m a x L ? I N \tilde{L}=\frac{2}{\lambda_{max}}L-I_N L~=��max?2?L?IN?(������Ϊ������Chebyshev����ʽ������Ҫ��[ ? 1 , 1 ] ֮��),ͨ�����ַ������Խ�ʱ�临�ӶȽ�Ϊ O ( K �O E �O ) O(K|E|) O(K�OE�O)��
3.1.2 spatial-based convolutions
��ɢ����������(DCNN)[25]��ͼ�ξ�����Ϊ��ɢ��������������Ϣ��һ����ת�Ƹ��ʴ�һ���ڵ㴫�䵽�����ڽڵ�֮һ,�Ա���Ϣ�ֲ��ڼ���֮��ﵽƽ�⡣ �����㶨������:
Y
j
=
��
(
��
k
=
0
K
?
1
��
i
=
1
F
I
(
��
k
,
1
,
i
,
j
(
D
O
?
1
A
)
k
+
��
k
,
2
,
i
,
j
(
D
I
?
1
A
T
)
k
)
X
i
)
Y
=
��
(
��
K
?
1
(
D
O
?
1
A
)
k
X
W
k
1
+
(
D
I
?
1
A
T
)
k
X
W
k
2
)
\begin{aligned} Y_{j} &=\boldsymbol{\rho}\left(\sum_{k=0}^{\mathrm{K}-1} \sum_{i=1}^{\mathbf{F}_{\mathbf{I}}}\left(\theta_{k, 1, i, j}\left(\mathbf{D}_{\mathbf{O}}^{-1} \mathbf{A}\right)^{k}+\theta_{k, 2, i, j}\left(\mathbf{D}_{\mathbf{I}}^{-1} \mathbf{A}^{T}\right)^{k}\right) X_{i}\right) \\ Y &=\boldsymbol{\rho}\left(\sum^{\mathbf{K}-1}\left(\mathbf{D}_{\mathrm{O}}^{-1} \mathbf{A}\right)^{k} X W_{k 1}+\left(\mathbf{D}_{\mathbf{I}}^{-1} \mathbf{A}^{T}\right)^{k} X W_{k 2}\right) \end{aligned}
Yj?Y?=��(k=0��K?1?i=1��FI??(��k,1,i,j?(DO?1?A)k+��k,2,i,j?(DI?1?AT)k)Xi?)=��(��K?1?(DO?1?A)kXWk1?+(DI?1?AT)kXWk2?)?
����
D
o
D_o
Do?Ϊ���Ⱦ���
D
I
D_I
DI?Ϊ��Ⱦ��� ״̬Ǩ�ƾ�����Ϊ
D
?
1
A
D^{-1}A
D?1A
3.1.3 ͼ�����ڽ�ͨ�����Ӧ��
- Guo et al.���¶����˵�ע�����,������Ӧ�ز���ͨ�����еĶ�̬�����;
- Y u .����ͨ��ɨ��ͼ�ϵ�K���ھӺ�ʱ�����ϵ�Kt�ھ�,��û�����������,�ڿռ��ʱ��ά�����ƹ���SGC
3.2 RNN
3.2.1 LSTM
Ϊ�˿˷��ݶ���ʧ����,LSTM�����ſػ���
i
t
=
��
(
[
H
t
?
1
,
X
t
]
?
W
i
+
b
i
)
o
t
=
��
(
[
H
t
?
1
,
X
t
]
?
W
o
+
b
o
)
f
t
=
��
(
[
H
t
?
1
,
X
t
]
?
W
f
+
b
f
)
C
t
=
f
t
��
C
t
?
1
+
i
t
��
tanh
?
(
[
H
t
?
1
,
X
t
]
?
W
c
+
b
c
)
H
t
=
o
t
��
tanh
?
(
C
t
)
\begin{aligned} i_{t} &=\sigma\left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{i}+b_{i}\right) \\ o_{t} &=\sigma\left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{o}+b_{o}\right) \\ f_{t} &=\sigma\left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{f}+b_{f}\right) \\ \mathbf{C}_{t} &=f_{t} \odot \mathbf{C}_{t-1}+i_{t} \odot \tanh \left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{c}+b_{c}\right) \\ \mathbf{H}_{t} &=o_{t} \odot \tanh \left(\mathbf{C}_{t}\right) \end{aligned}
it?ot?ft?Ct?Ht??=��([Ht?1?,Xt?]?Wi?+bi?)=��([Ht?1?,Xt?]?Wo?+bo?)=��([Ht?1?,Xt?]?Wf?+bf?)=ft?��Ct?1?+it?��tanh([Ht?1?,Xt?]?Wc?+bc?)=ot?��tanh(Ct?)?
3.2.2 GRU
GRU��LSTM�ı���,LSTM��������,�����,�����Ŷ�GRUֻ��������,�����˲���,�Ӷ�����ѵ��ʱ��
r
t
=
��
(
[
H
t
?
1
,
X
t
]
?
W
r
+
b
r
)
u
t
=
��
(
[
H
t
?
1
,
X
t
]
?
W
u
+
b
u
)
H
~
t
=
tanh
?
(
r
t
��
[
H
t
?
1
,
X
t
]
?
W
h
+
b
h
)
H
t
=
u
t
��
H
t
?
1
+
(
1
?
u
t
)
��
H
~
t
\begin{aligned} r_{t} &=\boldsymbol{\sigma}\left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{r}+b_{r}\right) \\ u_{t} &=\boldsymbol{\sigma}\left(\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{u}+b_{u}\right) \\ \tilde{\mathbf{H}}_{t} &=\tanh \left(r_{t} \odot\left[\mathbf{H}_{t-1}, \mathbf{X}_{t}\right] \cdot W_{h}+b_{h}\right) \\ \mathbf{H}_{t} &=u_{t} \odot \mathbf{H}_{t-1}+\left(1-u_{t}\right) \odot \tilde{\mathbf{H}}_{t} \end{aligned}
rt?ut?H~t?Ht??=��([Ht?1?,Xt?]?Wr?+br?)=��([Ht?1?,Xt?]?Wu?+bu?)=tanh(rt?��[Ht?1?,Xt?]?Wh?+bh?)=ut?��Ht?1?+(1?ut?)��H~t??
3.2.3 RNN�ڽ�ͨ�����Ӧ��
- Spa-tiotemporal multi-graph convolution network for ride-hailing demand forecasting:����������Ϣ,���������������Ϣ��SGCN���,�ϲ���ע����������,�ԶԲ�ͬʱ������Ĺ۲�ֵ֮�������Խ�ģ
- Gated residual recurrent graph neural networks for traffic prediction:ͨ����������Ƕ���ⲿ�����������ⲿ����,����ͨ���в�·������ǰ������״̬���ӵ���һ������״̬,����ʹGRU�ԶԽ�ͨ��ʷ�۲��е�ͻȻ�仯�������к�³��
- Y u .����[105]ͨ���ı�����״̬��һ�����ŵ���Ծ���Ӳ���GRU,�� H t = G R U ( [ H t ? 1 , X t ] ) H_t=GRU([H_{t-1},X_t]) Ht?=GRU([Ht?1?,Xt?])��Ϊ H t = G R U ( [ H t ? s , X t ] ) H_t=GRU([H_{t-s},X_t]) Ht?=GRU([Ht?s?,Xt?])
- ����ͼ����(SGC)����ɢͼ����(DGC)������RNNs���ز��еľ���˷�,�����ϲ���ʱ�������
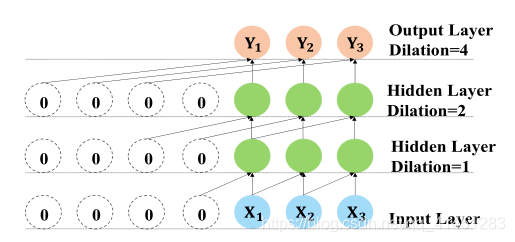
3.3 TCN
3.3.1 Sequence Modeling and 1-D TCN
TCN�ǽ��������������;����Ľ�ϲ���:
y
t
=
��
?
T
d
x
t
=
��
k
=
0
K
?
1
w
k
x
t
?
d
k
\mathbf{y}_{t}=\Theta *_{\mathcal{T}^{\mathbf{d}}} \mathbf{x}_{t}=\sum_{k=0}^{\mathbf{K}-1} w_{k} \mathbf{x}_{t-\mathbf{d} k}
yt?=��?Td?xt?=k=0��K?1?wk?xt?dk?
T
d
_{\mathcal{T}^{\mathbf{d}}}
Td?��������Ϊd��dilated causal����,�ڴֹ�����TCN���б�LSTM���õ�Ч����
4. ��ͨ������Ĵ���ս
4.1 �ռ������IJ�
- Spatial Locality: �ռ�ֲ�����ָ��������ͨ���˴˸߶���ء�
- Multiple Relationships: λ�����Բ����ڿռ��ڽ���,��Ŀ���������ͨ�����ַ�ŷ����¹�ϵ(�繦�������ԡ���ͨ��ͨ�ԡ������ھ�)��Զ�����������
- Global Connectivity:ָ��ͬ�����Ľ�ͨ״�������������ģ���Ӱ�졣��ȫ����ͨ�Ե�һ�����з����ǽ���ͨ�����в��ϱ仯�Ľ�ͨ״����ģΪ�����������ģ�ϵ���ɢ����,����ɢ������ת�ƾ�����ݼ�����ʾ��
4.2 ʱ������
- Multi-timescale:һЩ�Ӷ�ʱ��߶ȵĽǶ���ȡʱ������ԡ�ʱ���������ֽ�������,ÿ���,��ÿ�ܵ�������Attention based spatial-temporal graph convolutional networks for traffic flow forecasting��������������ͬ�ṹ�IJ���������ֱ�ģ������ʱ�����ԡ�
- Different Weights:һЩ������Ϊ,��ʷ�۲��δ���۲�֮���������ڲ�ͬ��ʱ��Ƭ���Dz�ͬ�ġ�
4.3 ʱ������
������ģʱ��˿ռ�������һ�������Ǻ����˿ռ�������ʱ������֮���DZ�ڽ���,����ܻ���Ԥ�����ܡ�Ϊ�˿˷���������,һ�����еķ����ǽ�ͼ��������(����,SGC��DGC)��ϵ�RNNs��,�����ϲ���ʱ������ԡ�
4.4 External Factors
�����ⲿ������Ҫ�����ִ�����������һ�ַ����ǽ��ⲿ����������������������,������������ģ�͡��ڶ��ַ��������һ�������������ⲿ���ص��ⲿ�����
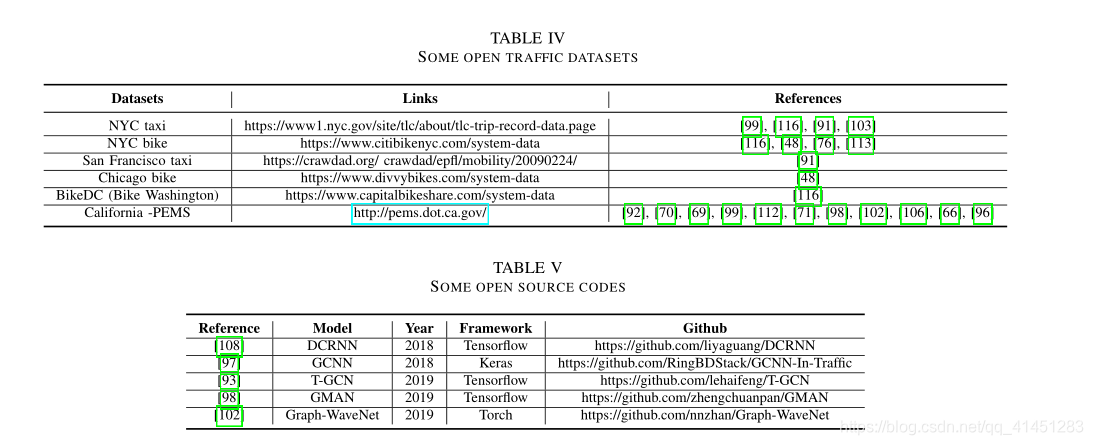
һЩ��Դ���ݺ�ģ��