为什么用CNN
你可能觉得CNN运作很复杂,但事实上它的模型是要比DNN还要更简单的。我们就是用power-knowledge 去把原来fully connect layer中一些参数拿掉就成了CNN。
Small region
大部分的pattern其实要比整张的image要小,对一个neural来说,假设它要知道一个image里面有没有某一个pattern出现,它其实是不需要看整张image,它只要看image的一小部分。
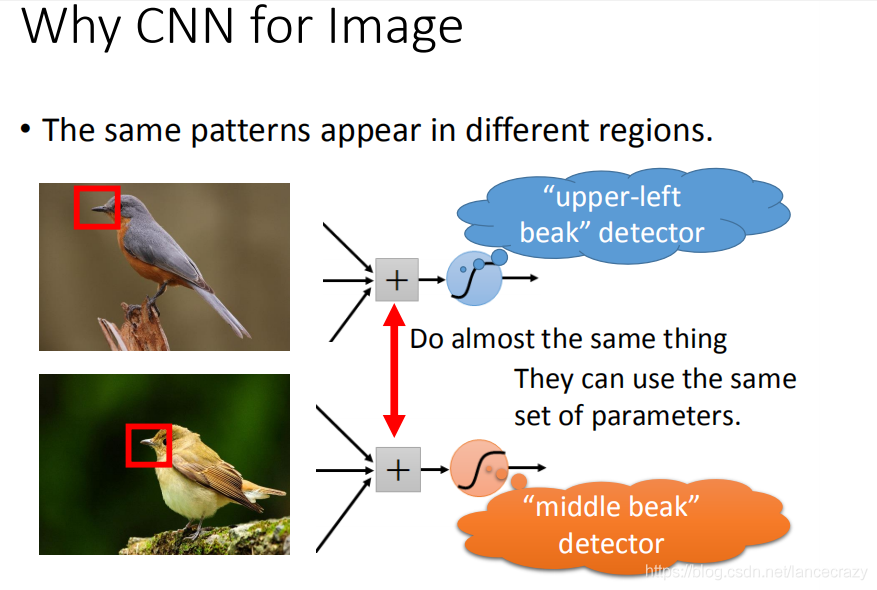
Same Patterns
[外链图片转存中…(img-4kopf0GQ-1627138182712)]
第二个观察是这样子,同样的pattern在image里面,可能会出现在image不同的部分,但是代表的是同样的含义,它们有同样的形状,可以用同样的neural,同样的参数就可以把patter侦测出来。
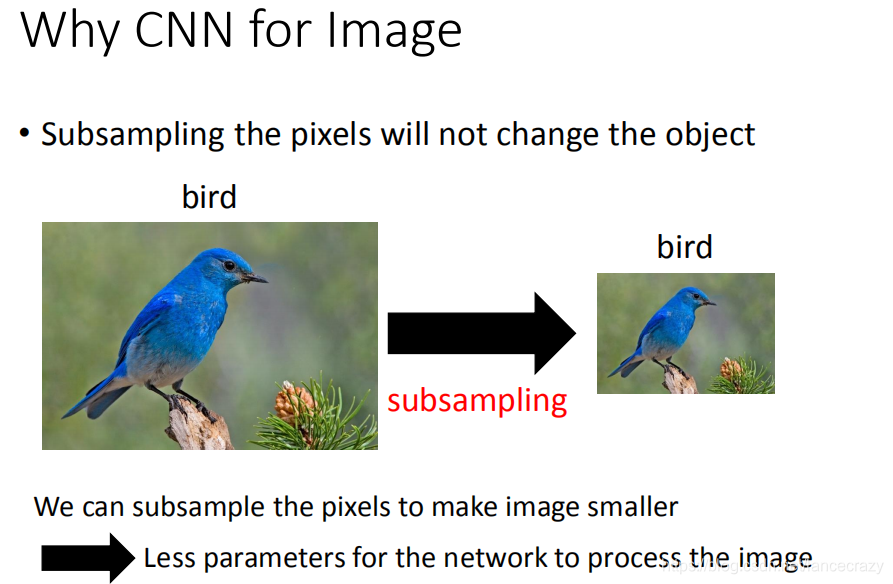
Subsampling
[外链图片转存中…(img-FNdvTClv-1627138182758)]
第三个是:我们知道一个image你可以做subsampling,你把一个image的奇数行,偶数列的pixel拿掉,变成原来十分之一的大小,它其实不会影响人对这张image的理解。用这样的概念把image变小,这样就可以减少你需要的参数。
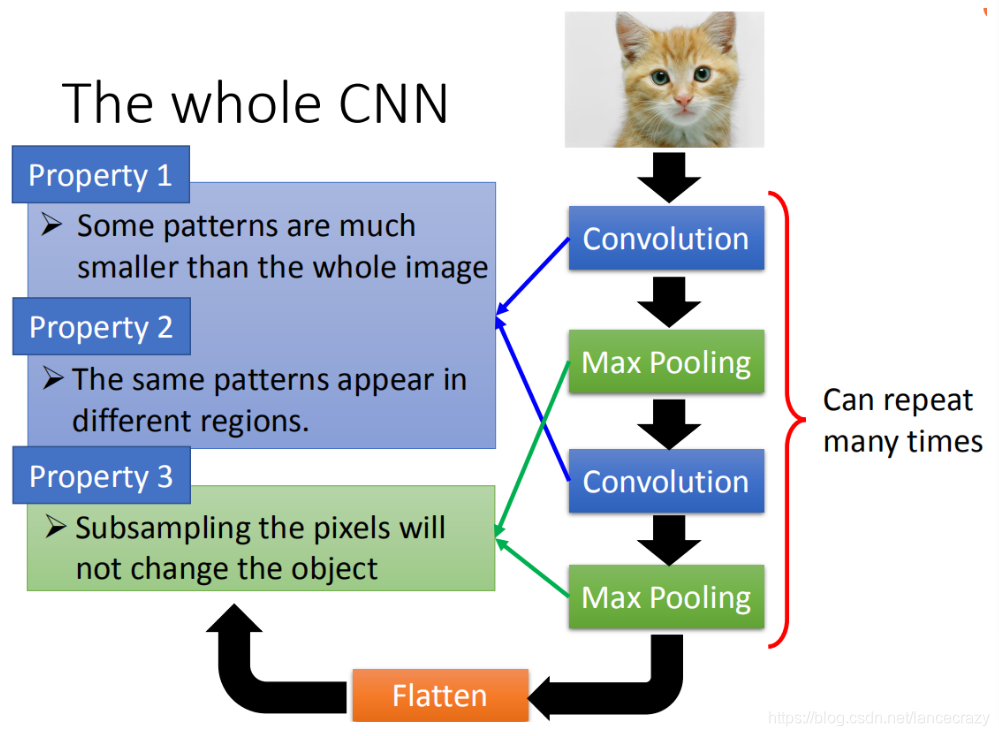
CNN架构
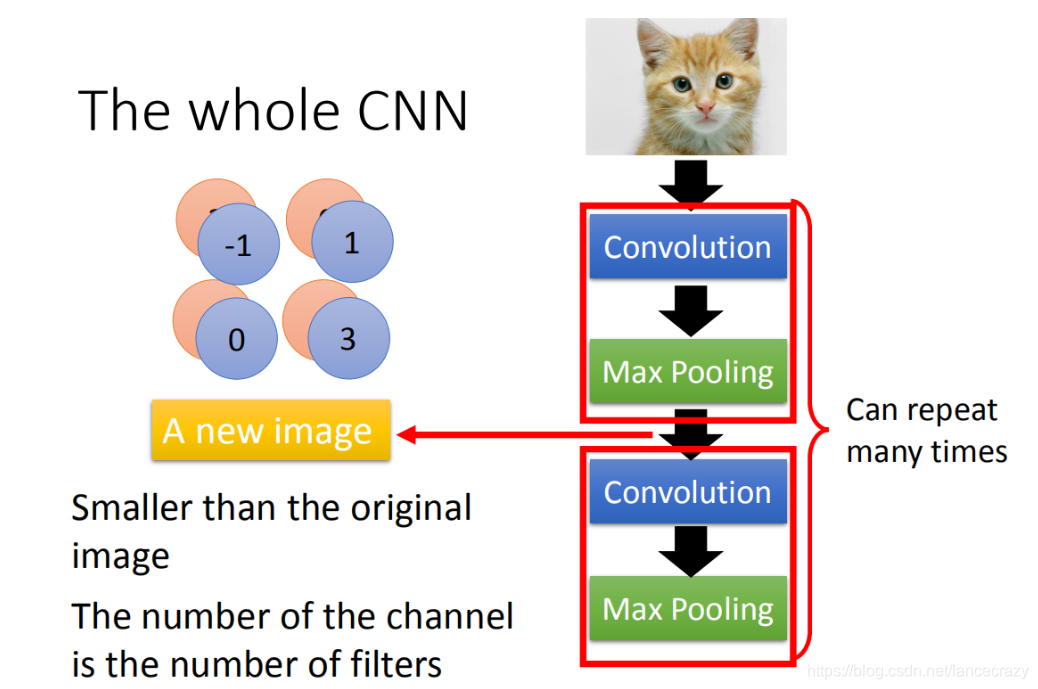
首先input一张image以后,这张image会通过convolution layer,接下里做max pooling这件事,然后在做convolution,再做max pooling这件事。这个process可以反复无数次,反复的次数你觉得够多之后,(但是反复多少次你是要事先决定的,它就是network的架构(就像你的neural有几层一样),你要做几层的convolution,做几层的Max Pooling,你再定neural架构的时候,你要事先决定好)。你做完决定要做的convolution和Max Pooling以后,你要做另外一件事,这件事情叫做flatten,再把flatten的output丢到一般fully connected feedforward network,然后得到影像辨识的结果。
[外链图片转存中…(img-pzDRXqZ8-1627138182775)]
我们刚才讲基于三个对影像处理的观察,所以设计了CNN这样的架构。
第一个观察是,要生成一个pattern,不要看整张的image,你只需要看image的一小部分。第二是,通用的pattern会出现在一张图片的不同的区域。第三个是,我们可以做subsampling
前面的两个property可以用convolution来处理掉,最后的property可以用Max Pooling这件事来处理。
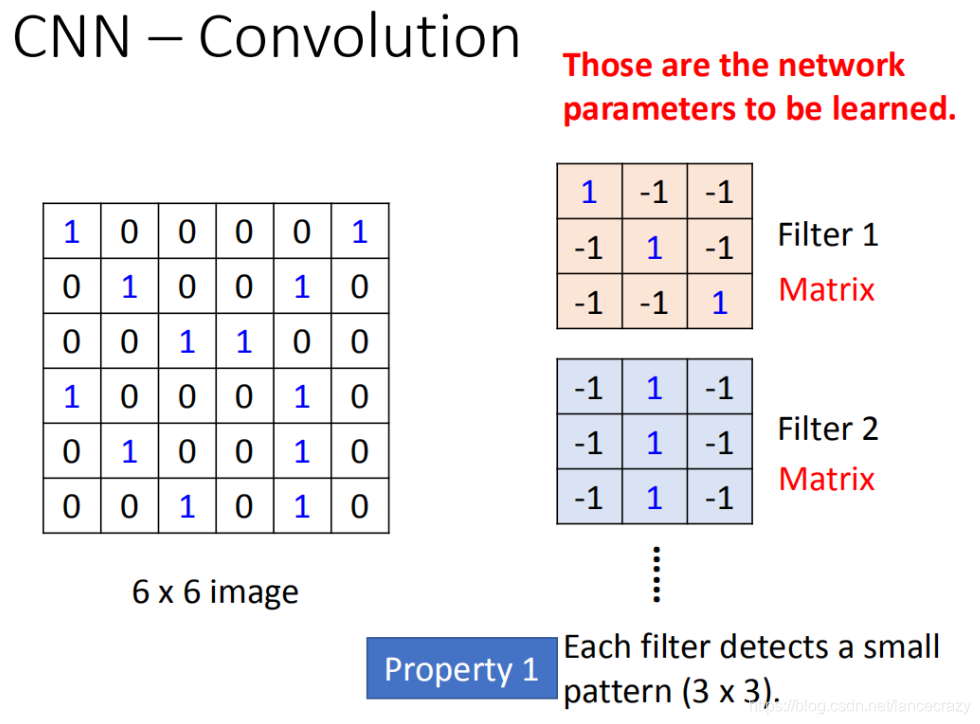
Convolution
Propetry1
[外链图片转存中…(img-0NcZqbHK-1627138182786)]
假设现在我们的network的input是一张6*6的Image,如果是黑白的,一个pixel就只需要用一个value去描述它,1就代表有涂墨水,0就代表没有涂到墨水。那在convolution layer里面,它由一组的filter,(其中每一个filter其实就等同于是fully connect layer里面的一个neuron),每一个filter其实就是一个matrix(3 *3),这每个filter里面的参数(matrix里面每一个elem ent值)就是network的parameter(这些parameter是要学习出来的,并不是需要人去设计的)
每个filter如果是3* 3的detects意味着它就是再侦测一个3 *3的pattern
Propetry2
这个filter咋样跟这个image运作呢?首先第一个filter是一个3* 3的matrix,把这个filter放在image的左上角,把filter的9个值和image的9个值做内积,两边都是1,1,1(斜对角),内积的结果就得到3。(移动多少是事先决定的),移动的距离叫做stride(stride等于多少,自己来设计),
经过这件事情以后,本来是6 *6的matrix,经过convolution process就得到4 *4的matrix。如果你看filter的值,斜对角的值是1,1,1。所以它的工作就是detain1有没有1,1,1(连续左上到右下的出现在这个image里面)。比如说:出现在这里(如图所示蓝色的直线),所以这个filter就会告诉你:左上跟左下出现最大的值
就代表说这个filter要侦测的pattern,出现在这张image的左上角和左下角,这件事情就考虑了propetry2。同一个pattern出现在了左上角的位置跟左下角的位置,我们就可以用filter 1侦测出来,并不需要不同的filter来做这件事。
[外链图片转存中…(img-1Iv7XRSB-1627138182793)]
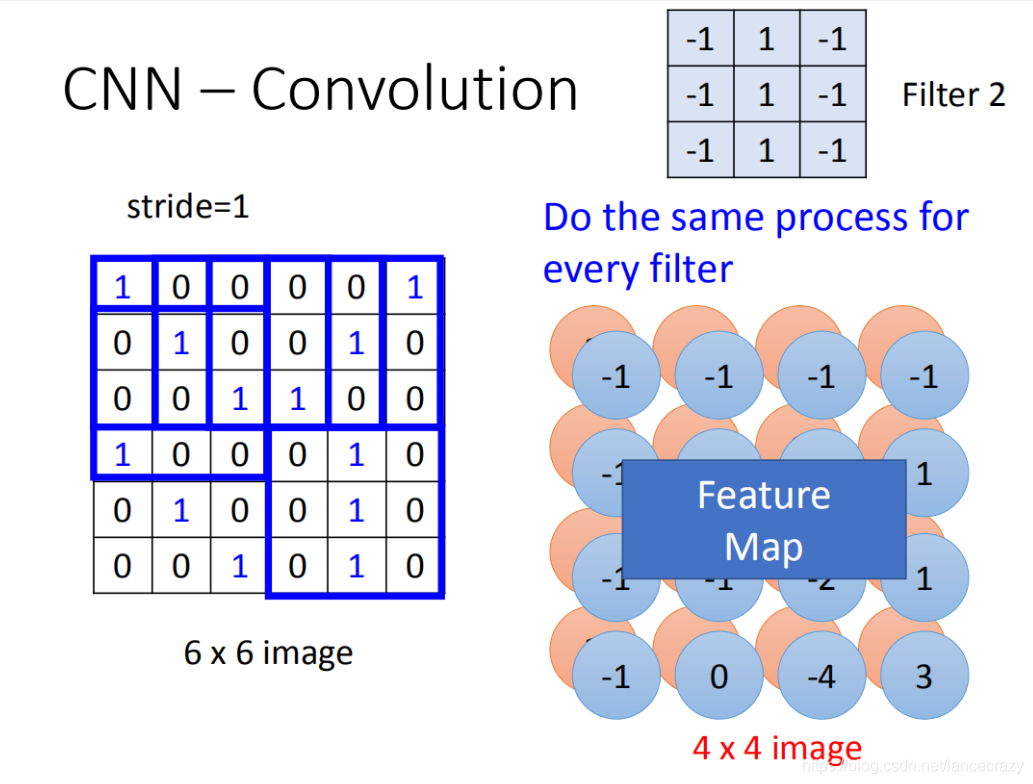
在一个convolution layer 里面会有很多的filter(刚才只是一个filter的结果),那另外的filter会有不同的参数(图中显示的filter2),它也做跟filter1一模一样的事情,在filter放到左上角再内积得到结果-1,依次类推。你把filter2跟 input image做完convolution之后,你就得到了另一个4*4的matrix,红色4 *4的matrix跟蓝色的matrix合起来就叫做feature map,看你有几个filter,你就得到多少个image(你有100个filter,你就得到100个4 *4的image)
[外链图片转存中…(img-70TofnpB-1627138182798)]
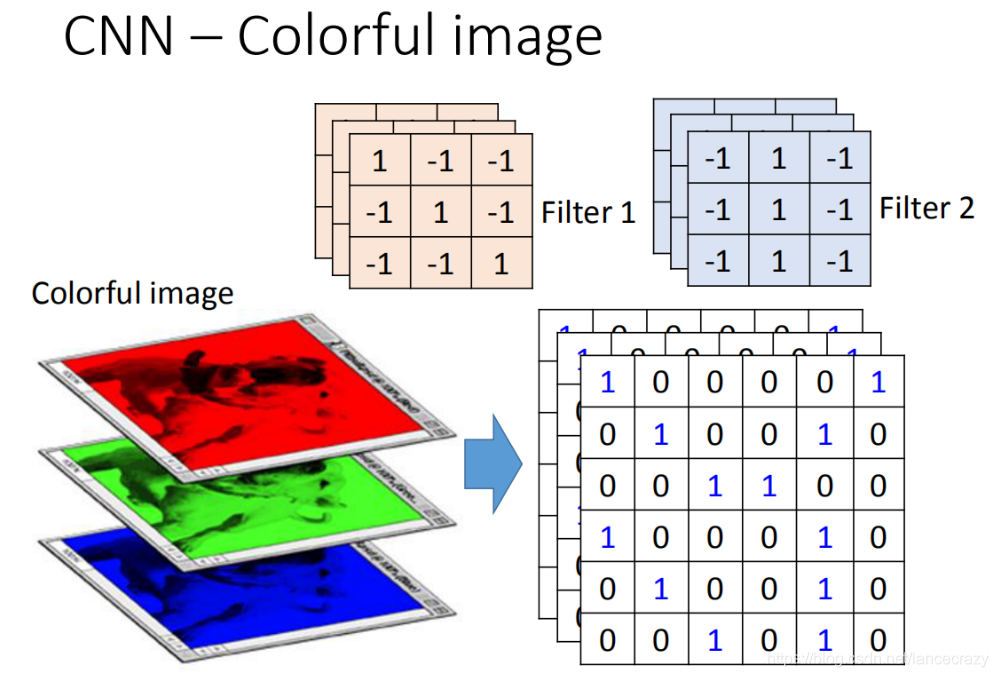
刚才举的例子是一张黑白的image,所以input是一个matrix。若今天换成彩色的image,彩色的image是由RGB组成的,所以,一个彩色的image就是好几个matrix叠在一起,就是一个立方体。如果要处理彩色image,这时候filter不是一个matrix,filter而是一个立方体。如果今天是RGB表示一个pixel的话,那input就是3*6 *6,那filter就是3 *3 *3。
在做convolution的话,就是将filter的9个值和image的9个值做内积(不是把每一个channel分开来算,而是合在一起来算,一个filter就考虑了不同颜色所代表的channel)
convolution和fully connected之间的关系
convolution就是fully connected layer把一些weight拿掉了。经过convolution的output其实就是一个hidden layer的neural的output。如果把这两个link在一起的话,convolution就是fully connected拿掉一些weight的结果。
我们在做convolution的时候,我们filter1放到左上角(先考虑filter1),然后做inner product,得到内积为3,这件事情就等同于把6* 6的image拉直(变成如图所示)。然后你有一个neural的output是3,这个neural的output考虑了9个pixel,这9个pixel分别就是编号(1,2,3,7,8,9,13,14,15)的pixel。这个filter做inner product以后的output 3就是某个neuron output 3时,就代表这个neuron的weight只连接到(1,2,3,7,8,9,13,14,15)。这9个weight就是filter matrix里面的9个weight(同样的颜色)
在fully connected中,一个neural应该是连接在所有的input(有36个pixel当做input,这个neuron应连接在36个input上),但是现在只连接了9个input(detain一个pattern,不需要看整张image,看9个input就好),这样做就是用了比较少的参数了。
[外链图片转存中…(img-zVLxCEOd-1627138182806)]
将stride=1(移动一格)做内积得到另外一个值-1,假设这个-1是另外一个neural的output,这个neural连接到input的(2,3,4,8,9,10,14,15,16),同样的weight代表同样的颜色。在9个matrix
当我们做这件事情就意味说:这两个neuron本来就在fully connect里面这两个neural本来是有自己的weight,当我们在做convolution时,首先把每一个neural连接的wight减少,强迫这两个neural共用一个weight。这件事就叫做shared weight,当我们做这件事情的时候,我们用的这个参数就比原来的更少。
Max pooling
[外链图片转存中…(img-bYI2L7Dn-1627138182819)]
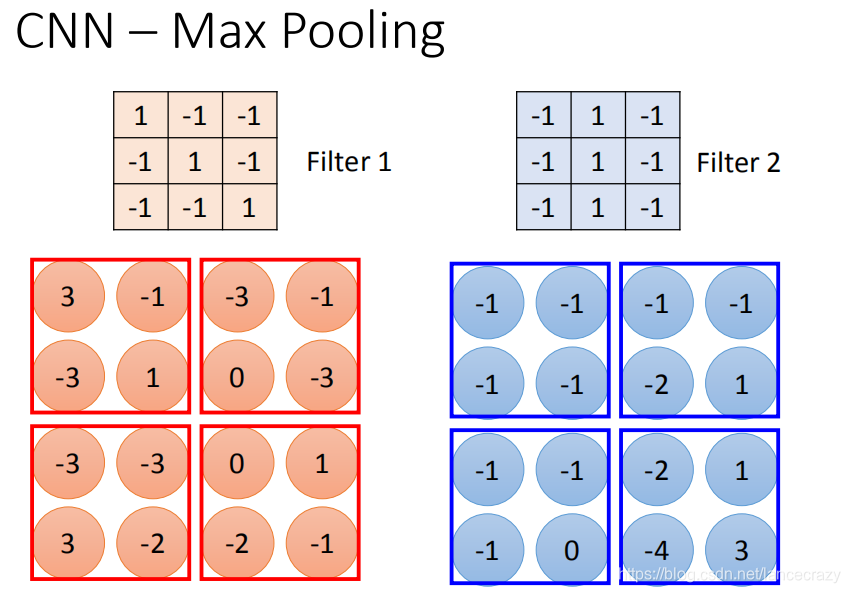
相对于convolution来说,Max Pooling是比较简单的。我们根据filter 1得到4*4的maxtrix,根据filter2得到另一个4 *4的matrix,接下来把output ,4个一组。每一组里面可以选择它们的平均或者选最大的都可以,就是把四个value合成一个value。这个可以让你的image缩小。
[外链图片转存中…(img-b5lxk9hR-1627138182821)]
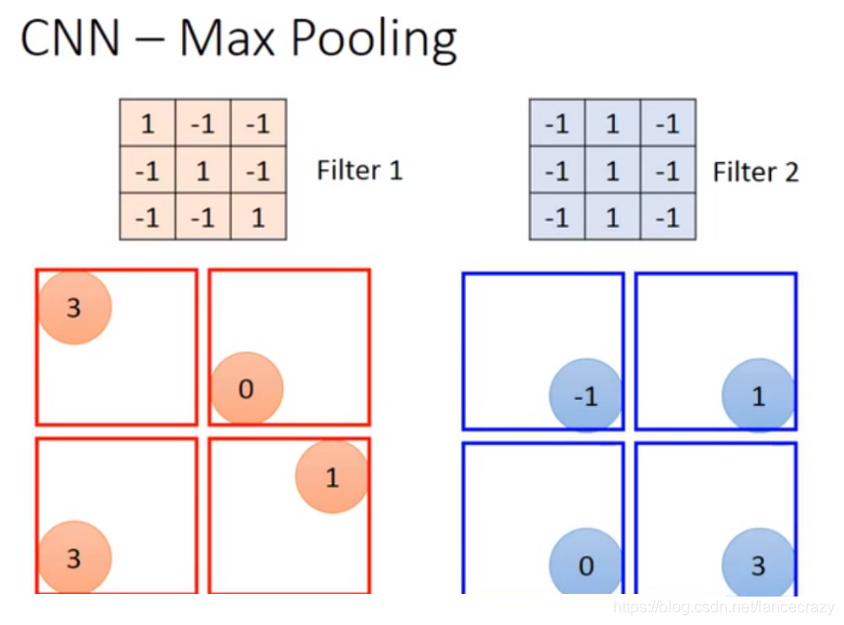
假设我们选择四个里面的max vlaue保留下来,这样可能会有个问题,把这个放到neuron里面,这样就不能够微分了,但是可以用微分的办法来处理的
做完一个convolution和一次max pooling,就将原来6 * 6的image变成了一个2 *2的image。这个2 *2的pixel的深度depend你有几个filter(你有50个filter你就有50维),得到结果就是一个new image but smaller,一个filter就代表了一个channel。
[外链图片转存中…(img-CBa01EdR-1627138182831)]
这边有一个问题:第一次有25个filter,得到25个feature map,第二个也是由25个filter,那将其做完是不是要得到$25^2$的feature map。其实不是这样的!
假设第一层filter有2个,第二层的filter在考虑这个imput时是会考虑深度的,并不是每个channel分开考虑,而是一次考虑所有的channel。所以convolution有多少个filter,output就有多少个filter(convolution有25个filter,output就有25个filter。只不过,这25个filter都是一个立方体)
Flatten
flatten就是feature map拉直,拉直之后就可以丢到fully connected feedforward netwwork,然后就结束了。
CNN in Keras
[外链图片转存中…(img-bsAa6EuX-1627138182832)]
唯一要改的是:network structure和input format,本来在DNN中input是一个vector,现在是CNN的话,会考虑 input image的几何空间的,所以不能给它一个vector。应该input一个tensor(高维的vector)。为什么要给三维的vector?因为image的长宽高各是一维,若是彩色的话就是第三维。所以要给三维的tensor
model.add(Convolution2D( 25, 3, 3)
25代表有25个filter,3 *3代表filter是一个3 *3的matrix
Input_shape=(28,28,1)
假设我要做手写数字辨识,input是28 *28的image,每个pixel都是单一颜色。所以input_shape是(1,28,28)。如果是黑白图为1(blacj/white),如果是彩色的图时为3(每个pixel用三个值来表述)。
MaxPooling2D(( 2, 2 ))
2,2表示把2*2的feature map里面的pixel拿出来,选择max value
[外链图片转存中…(img-DJNLUhE1-1627138182833)]
假设我们input一个1 *28 * 28的image,你就可以写model.add(Convolution2D( 25, 3, 3, Input_shape=(28,28,1)))。通过convplution以后得到output是25 *26 26(25个filter,通过3 *3得到26 * 26)。然后做max pooling,2 *2一组选择 max value得到 25 *13 * 13
然后在做一次convolution,假设我在这选50个filter,每一个filter是3 *3时,那么现在的channel就是50。13 *13的image通过3 *3的filter,就成11 *11,然后通过2 *2的Max Pooling,变成了50 *5 *5
在第一个convolution layer里面,每一个filter有9个参数,在第二个convolution layer里面,虽然每一个filter都是3 *3,但不是3 *3个参数,因为它input channel 是25个,所以它的参数是3 *3 *25(225)。
[外链图片转存中…(img-vFWJ0Mm3-1627138182834)]
通过两次convolution,两次Max Pooling,原来是1 *28 *28变为50 *5 *5。flatten的目的就是把50 *5 *5拉直,拉直之后就成了1250维的vector,然后把1250维的vector丢到fully connected。## 为什么用CNN
你可能觉得CNN运作很复杂,但事实上它的模型是要比DNN还要更简单的。我们就是用power-knowledge 去把原来fully connect layer中一些参数拿掉就成了CNN。
Small region
大部分的pattern其实要比整张的image要小,对一个neural来说,假设它要知道一个image里面有没有某一个pattern出现,它其实是不需要看整张image,它只要看image的一小部分。
Same Patterns
第二个观察是这样子,同样的pattern在image里面,可能会出现在image不同的部分,但是代表的是同样的含义,它们有同样的形状,可以用同样的neural,同样的参数就可以把patter侦测出来。
Subsampling
第三个是:我们知道一个image你可以做subsampling,你把一个image的奇数行,偶数列的pixel拿掉,变成原来十分之一的大小,它其实不会影响人对这张image的理解。用这样的概念把image变小,这样就可以减少你需要的参数。
CNN架构
首先input一张image以后,这张image会通过convolution layer,接下里做max pooling这件事,然后在做convolution,再做max pooling这件事。这个process可以反复无数次,反复的次数你觉得够多之后,(但是反复多少次你是要事先决定的,它就是network的架构(就像你的neural有几层一样),你要做几层的convolution,做几层的Max Pooling,你再定neural架构的时候,你要事先决定好)。你做完决定要做的convolution和Max Pooling以后,你要做另外一件事,这件事情叫做flatten,再把flatten的output丢到一般fully connected feedforward network,然后得到影像辨识的结果。
我们刚才讲基于三个对影像处理的观察,所以设计了CNN这样的架构。
第一个观察是,要生成一个pattern,不要看整张的image,你只需要看image的一小部分。第二是,通用的pattern会出现在一张图片的不同的区域。第三个是,我们可以做subsampling
前面的两个property可以用convolution来处理掉,最后的property可以用Max Pooling这件事来处理。
Convolution
Propetry1
假设现在我们的network的input是一张6*6的Image,如果是黑白的,一个pixel就只需要用一个value去描述它,1就代表有涂墨水,0就代表没有涂到墨水。那在convolution layer里面,它由一组的filter,(其中每一个filter其实就等同于是fully connect layer里面的一个neuron),每一个filter其实就是一个matrix(3 *3),这每个filter里面的参数(matrix里面每一个elem ent值)就是network的parameter(这些parameter是要学习出来的,并不是需要人去设计的)
每个filter如果是3* 3的detects意味着它就是再侦测一个3 *3的pattern
Propetry2
这个filter咋样跟这个image运作呢?首先第一个filter是一个3* 3的matrix,把这个filter放在image的左上角,把filter的9个值和image的9个值做内积,两边都是1,1,1(斜对角),内积的结果就得到3。(移动多少是事先决定的),移动的距离叫做stride(stride等于多少,自己来设计),
经过这件事情以后,本来是6 *6的matrix,经过convolution process就得到4 *4的matrix。如果你看filter的值,斜对角的值是1,1,1。所以它的工作就是detain1有没有1,1,1(连续左上到右下的出现在这个image里面)。比如说:出现在这里(如图所示蓝色的直线),所以这个filter就会告诉你:左上跟左下出现最大的值
就代表说这个filter要侦测的pattern,出现在这张image的左上角和左下角,这件事情就考虑了propetry2。同一个pattern出现在了左上角的位置跟左下角的位置,我们就可以用filter 1侦测出来,并不需要不同的filter来做这件事。
在一个convolution layer 里面会有很多的filter(刚才只是一个filter的结果),那另外的filter会有不同的参数(图中显示的filter2),它也做跟filter1一模一样的事情,在filter放到左上角再内积得到结果-1,依次类推。你把filter2跟 input image做完convolution之后,你就得到了另一个4*4的matrix,红色4 *4的matrix跟蓝色的matrix合起来就叫做feature map,看你有几个filter,你就得到多少个image(你有100个filter,你就得到100个4 *4的image)
刚才举的例子是一张黑白的image,所以input是一个matrix。若今天换成彩色的image,彩色的image是由RGB组成的,所以,一个彩色的image就是好几个matrix叠在一起,就是一个立方体。如果要处理彩色image,这时候filter不是一个matrix,filter而是一个立方体。如果今天是RGB表示一个pixel的话,那input就是3*6 *6,那filter就是3 *3 *3。
在做convolution的话,就是将filter的9个值和image的9个值做内积(不是把每一个channel分开来算,而是合在一起来算,一个filter就考虑了不同颜色所代表的channel)
convolution和fully connected之间的关系
convolution就是fully connected layer把一些weight拿掉了。经过convolution的output其实就是一个hidden layer的neural的output。如果把这两个link在一起的话,convolution就是fully connected拿掉一些weight的结果。
我们在做convolution的时候,我们filter1放到左上角(先考虑filter1),然后做inner product,得到内积为3,这件事情就等同于把6* 6的image拉直(变成如图所示)。然后你有一个neural的output是3,这个neural的output考虑了9个pixel,这9个pixel分别就是编号(1,2,3,7,8,9,13,14,15)的pixel。这个filter做inner product以后的output 3就是某个neuron output 3时,就代表这个neuron的weight只连接到(1,2,3,7,8,9,13,14,15)。这9个weight就是filter matrix里面的9个weight(同样的颜色)
在fully connected中,一个neural应该是连接在所有的input(有36个pixel当做input,这个neuron应连接在36个input上),但是现在只连接了9个input(detain一个pattern,不需要看整张image,看9个input就好),这样做就是用了比较少的参数了。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zVLxCEOd-1627138182806)(res/chapter21-16.png)]
将stride=1(移动一格)做内积得到另外一个值-1,假设这个-1是另外一个neural的output,这个neural连接到input的(2,3,4,8,9,10,14,15,16),同样的weight代表同样的颜色。在9个matrix
当我们做这件事情就意味说:这两个neuron本来就在fully connect里面这两个neural本来是有自己的weight,当我们在做convolution时,首先把每一个neural连接的wight减少,强迫这两个neural共用一个weight。这件事就叫做shared weight,当我们做这件事情的时候,我们用的这个参数就比原来的更少。
Max pooling
相对于convolution来说,Max Pooling是比较简单的。我们根据filter 1得到4*4的maxtrix,根据filter2得到另一个4 *4的matrix,接下来把output ,4个一组。每一组里面可以选择它们的平均或者选最大的都可以,就是把四个value合成一个value。这个可以让你的image缩小。
假设我们选择四个里面的max vlaue保留下来,这样可能会有个问题,把这个放到neuron里面,这样就不能够微分了,但是可以用微分的办法来处理的
做完一个convolution和一次max pooling,就将原来6 * 6的image变成了一个2 *2的image。这个2 *2的pixel的深度depend你有几个filter(你有50个filter你就有50维),得到结果就是一个new image but smaller,一个filter就代表了一个channel。
这边有一个问题:第一次有25个filter,得到25个feature map,第二个也是由25个filter,那将其做完是不是要得到$25^2$的feature map。其实不是这样的!
假设第一层filter有2个,第二层的filter在考虑这个imput时是会考虑深度的,并不是每个channel分开考虑,而是一次考虑所有的channel。所以convolution有多少个filter,output就有多少个filter(convolution有25个filter,output就有25个filter。只不过,这25个filter都是一个立方体)
Flatten
flatten就是feature map拉直,拉直之后就可以丢到fully connected feedforward netwwork,然后就结束了。
CNN in Keras
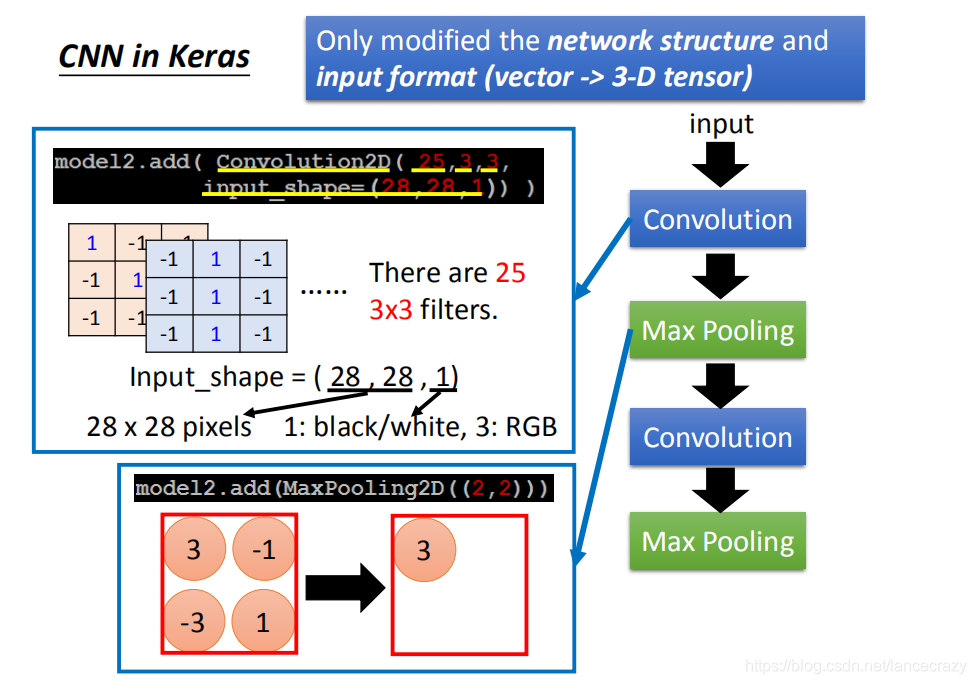
唯一要改的是:network structure和input format,本来在DNN中input是一个vector,现在是CNN的话,会考虑 input image的几何空间的,所以不能给它一个vector。应该input一个tensor(高维的vector)。为什么要给三维的vector?因为image的长宽高各是一维,若是彩色的话就是第三维。所以要给三维的tensor
model.add(Convolution2D( 25, 3, 3)
25代表有25个filter,3 *3代表filter是一个3 *3的matrix
Input_shape=(28,28,1)
假设我要做手写数字辨识,input是28 *28的image,每个pixel都是单一颜色。所以input_shape是(1,28,28)。如果是黑白图为1(blacj/white),如果是彩色的图时为3(每个pixel用三个值来表述)。
MaxPooling2D(( 2, 2 ))
2,2表示把2*2的feature map里面的pixel拿出来,选择max value
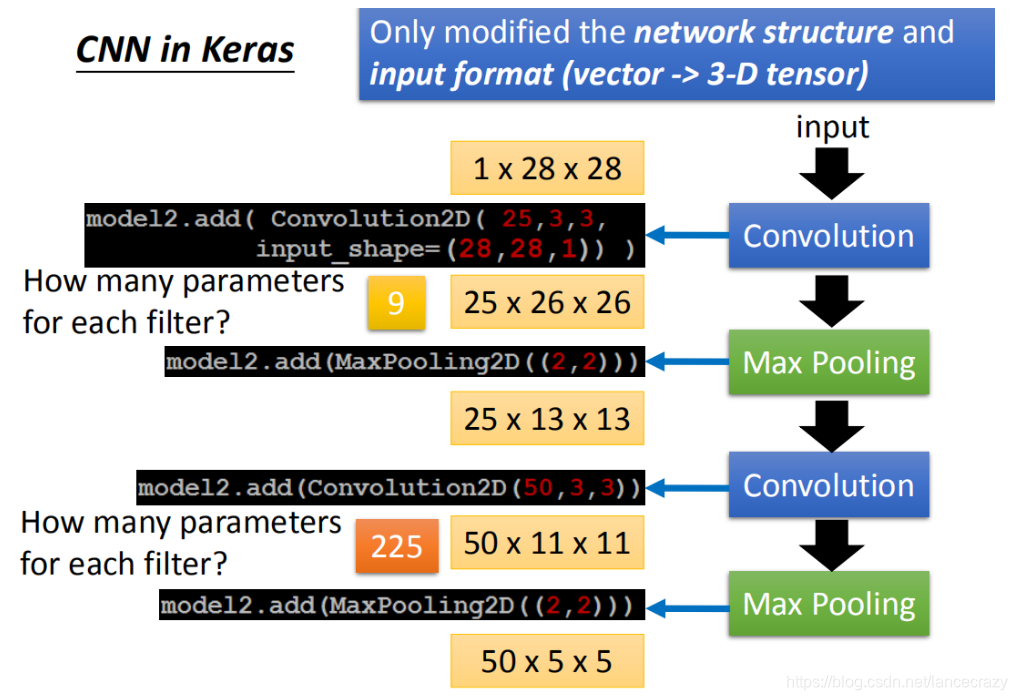
假设我们input一个1 *28 * 28的image,你就可以写model.add(Convolution2D( 25, 3, 3, Input_shape=(28,28,1)))。通过convplution以后得到output是25 *26 26(25个filter,通过3 *3得到26 * 26)。然后做max pooling,2 *2一组选择 max value得到 25 *13 * 13
然后在做一次convolution,假设我在这选50个filter,每一个filter是3 *3时,那么现在的channel就是50。13 *13的image通过3 *3的filter,就成11 *11,然后通过2 *2的Max Pooling,变成了50 *5 *5
在第一个convolution layer里面,每一个filter有9个参数,在第二个convolution layer里面,虽然每一个filter都是3 *3,但不是3 *3个参数,因为它input channel 是25个,所以它的参数是3 *3 *25(225)。
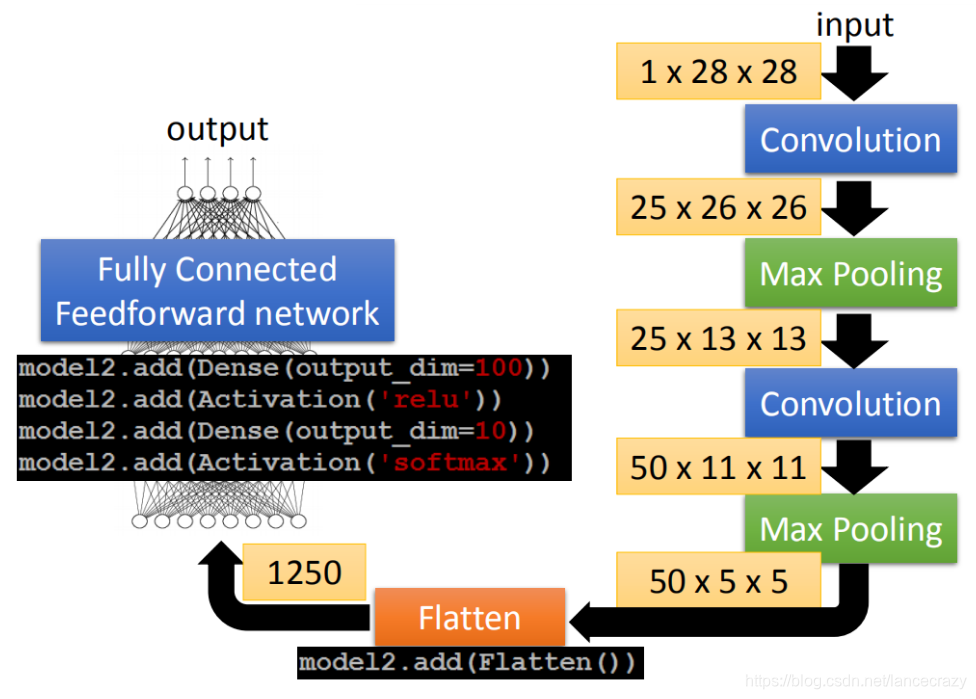
通过两次convolution,两次Max Pooling,原来是1 *28 *28变为50 *5 *5。flatten的目的就是把50 *5 *5拉直,拉直之后就成了1250维的vector,然后把1250维的vector丢到fully connected。