РДзд B еОСѕЖўДѓШЫЕФЁЖPyTorchЩюЖШбЇЯАЪЕМљЁЗP11 ЕФбЇЯАБЪМЧ
ЩЯвЛЦЊ ОэЛ§ЩёОЭјТчНјНз(GoogLeNetЁЂResNet) ЮвУЧЪЕМљСЫ GoogleNet КЭ ResNet СНДѓОЕфЭјТч:
- GoogleNet ДгЖрТЗбЁдёбЇЯА(Inception Module)ГіЗЂ,ЙЙНЈИќКУЕФЩёОЭјТч;
- ResNet ДгВаВюСЌНг(Residual Block)БЃСєЧГВуЬиеїГіЗЂ,ЙЙНЈИќЩюЕФЩёОЭјТчЁЃ
DenseNet1 НєЫцЦфКѓ,дйДЮбаОПСЫГЌЩюЖШЩёОЭјТчЕФЬнЖШЯћЪЇЮЪЬтКЭЬјСЌНтОіЗНАИЁЃЫћУЧЬсЕН,ResNet ЕШЕФЗНЗЈОЁЙмдкЩёОЭјТчЭиЦЫКЭбЕСЗЙ§ГЬЩЯгаЫљВЛЭЌ,ЕЋЫќУЧЖМгавЛИіЙиМќЬиеї:ЪЙгУЖЬТЗОЖСЌНгЧАКѓСНВуЁЃ
DenseNet НсЙЙ
DenseNet ИќМгЦЋжД,ЮЊСЫШЗБЃЭјТчдкЩюЖШДЋВЅжаФмБЃСєИќЖраХЯЂ,ЫћУЧВЛНіСЌНгЧАКѓСНВу,дквЛИі Dense Block жаУПвЛВуЖМКЭКѓУцЫљгаВуЯрСЌ,ВЂЧвЪЧНЋЬиеїдкЭЈЕРЩЯЖбЕўдйДЋШыЯТвЛВу(Яё Inception Module ЕФЪфГі),ЖјВЛЪЧ ResNet ФЧбљЕФдЊЫиЯрМгЁЃ
етЕБШЛФмБЃСєИќЖраХЯЂ,ВЛЙ§етЯдДцЯћКФПЩЯыЖјжЊ,етОЭЪЧЮЊЪВУДЫќНа Dense,вЛИі L ВуЕФ Dense Block га L ( L + 1 ) 2 \frac{L(L+1)}{2} 2L(L+1)? ЬѕСЌНгЁЃ
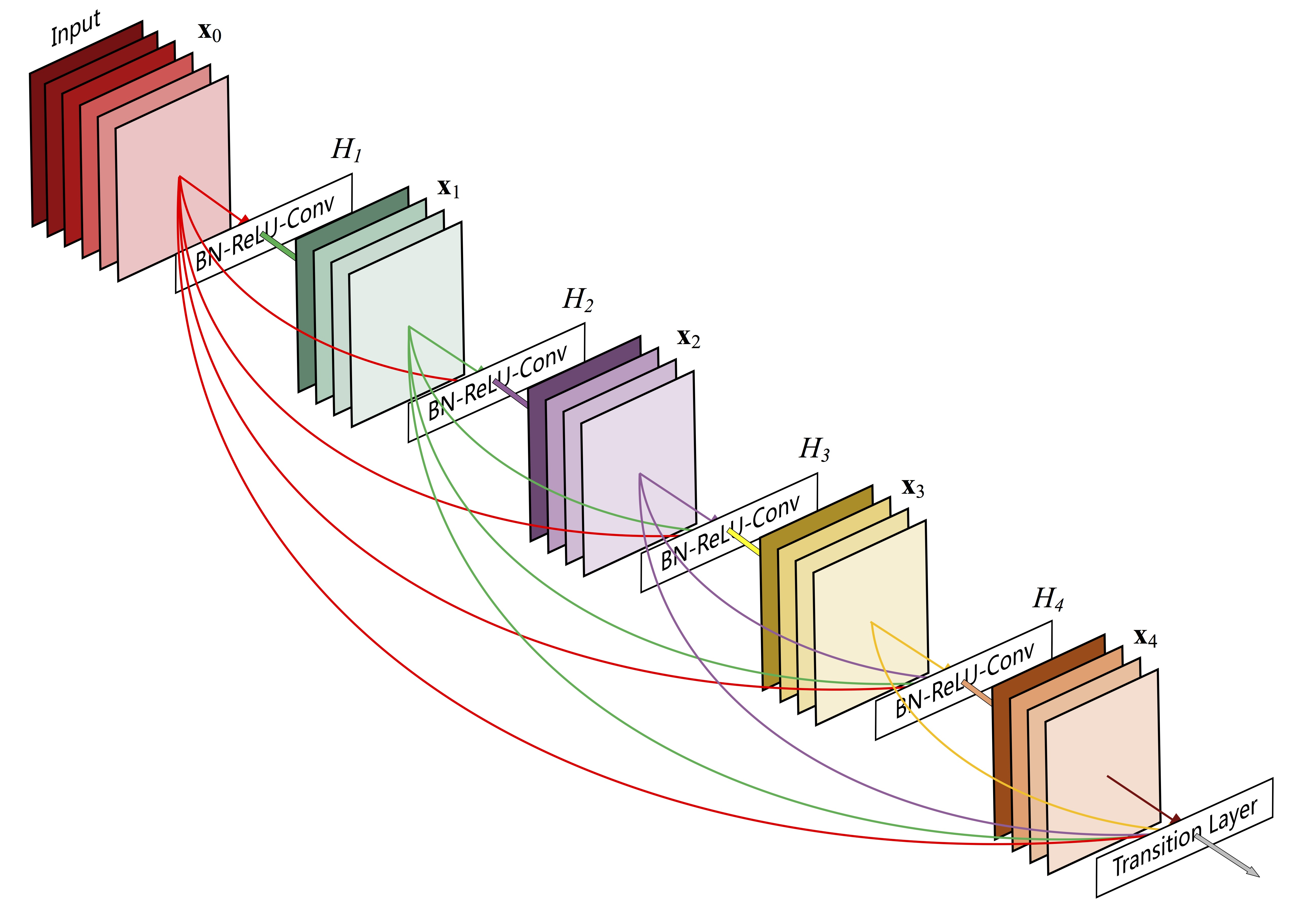
вЛЁЂDense Block
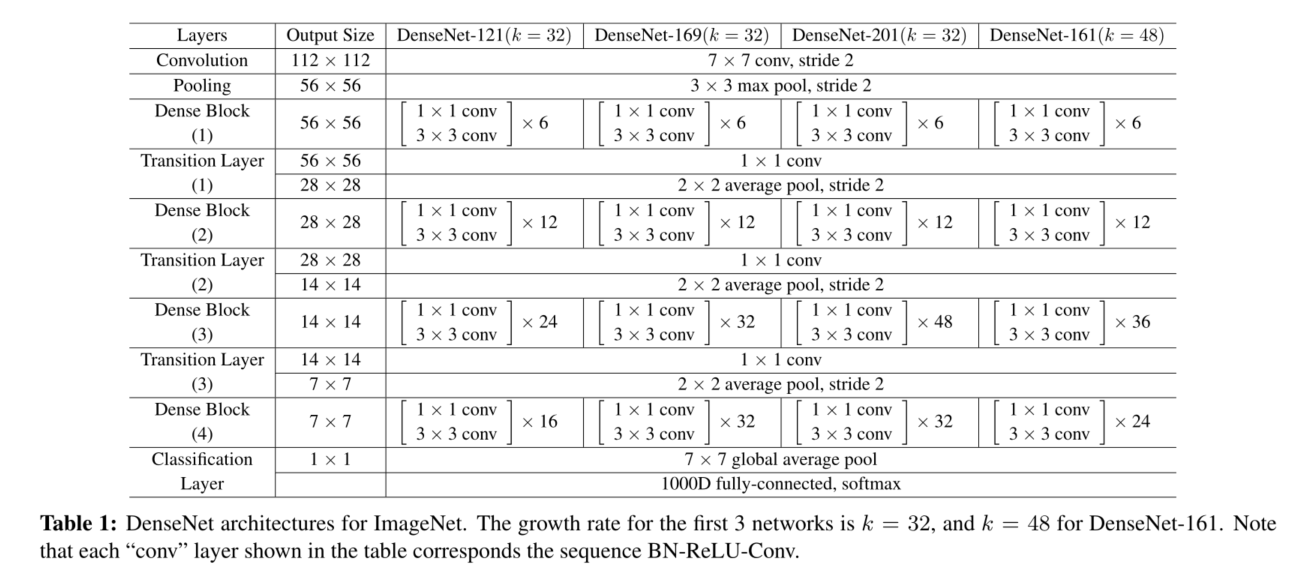
УПИі Dense Block РяЕФОэЛ§ВуЖМЪЧ 3ЁС3 ОэЛ§,ЯТБэЕкШ§СаГЫКХКѓУцЕФЪ§БэЪОвЛИі Dense Block жагаЖрЩйВуетбљЕФОэЛ§ЁЃ
- Bottleneck Layers
дкУПИі 3ЁС3 ОэЛ§жЎЧАв§Шы 1ЁС1 ОэЛ§зїЮЊЦПОБВу,ПЩвдМѕЩйЪфШыЬиеїЕФЭЈЕРЪ§,ДгЖјЬсИпМЦЫуаЇТЪЁЃ
Ыљвд,ШчЙћ Dense Block РяУцЪЧ 1ЁС1 ОэЛ§КЭ 3ЁС3 ОэЛ§ЕФзщКЯ,ФЧУДетаЉ Dense Blocks зщГЩЕФ DenseNet БЛГЦЮЊ DenseNet-BЁЃ
ЖўЁЂTransition Layer
ЕБШЛ,ЮЊСЫПижЦЯдДцеМгУ,DenseNet жївЊНсЙЙГ§СЫет Dense Block ЭтЛЙгаУПИі Block КѓСЌНгЕФЙ§ЖЩВу(Transition Layer),ЫќЭЈЙ§вЛИі 1ЁС1 ЕФОэЛ§ВуРДПижЦЭЈЕРЪ§,ВЂЪЙгУЦНОљГиЛЏРДМѕАыЬиеїЭМЕФИпКЭПэЁЃ
Ыљвд,Dense Blocks жЎМфДцдкЙ§ЖЩВу,ФЧУДетаЉ Dense Blocks зщГЩЕФ DenseNet БЛГЦЮЊ DenseNet-CЁЃ
СНепЖМДцдкЕФ DenseNet,ГЦЮЊ DenseNet-BC,етЪЧ DenseNet ЕФжеМЋХфжУЁЃЁЃЁЃ
Ш§ЁЂGrowth Rate
діГЄТЪ k k k,ЫќБэЪОУПвЛИіОэЛ§ВуЪфГіЕФЭЈЕРЪ§ЁЃТлЮФжаЫЕ:Щш k 0 k_0 k0? ЪЧГѕЪМЪфШыЕФЭМЯёЕФЭЈЕРЪ§,ФЧУД l l l ВуЕФ Dense Net ОЭЛсВњЩњ k 0 + k ( l ? 1 ) k_0 + k(l-1) k0?+k(l?1) ИіЭЈЕРЕФЬиеїЭМ,етИі k k k ОЭБЛГЦЮЊдіГЄТЪЁЃ
етБэЪОЭЈЕРЪ§ЁАБЌеЈЁБЫйЖШ,ЕЋЪЧЖрИувЛИіаТУћзжГіРДЯХЛЃШЫ,ЮвУЧЕБШЛПЩвджБНгЫЕетЪЧУПИіОэЛ§ВуЪфГіЕФЭЈЕРЪ§: o u t _ c h a n n e l s out\_channels out_channels,ЕЋЪЧдкДњТыЪЕЯжЙ§ГЬжаФуОЭФмЗЂЯж,ЪфГіЭЈЕРЪ§вЊгУгкМЦЫу
РћгУ Bottleneck layer,Translation layer вдМАНЯаЁЕФ Growth rate ЪЙЕУЭјТчБфе,ВЮЪ§МѕЩй,гааЇвжжЦСЫЙ§ФтКЯ,ЭЌЪБМЦЫуСПвВМѕЩйСЫ2ЁЃ
DenseNet зюКѓЕФЗжРрЦїЪЙгУШЋОжЦНОљГиЛЏНгвЛВуШЋСЌНгВуЁЃ
ЫФЁЂImplementation Details
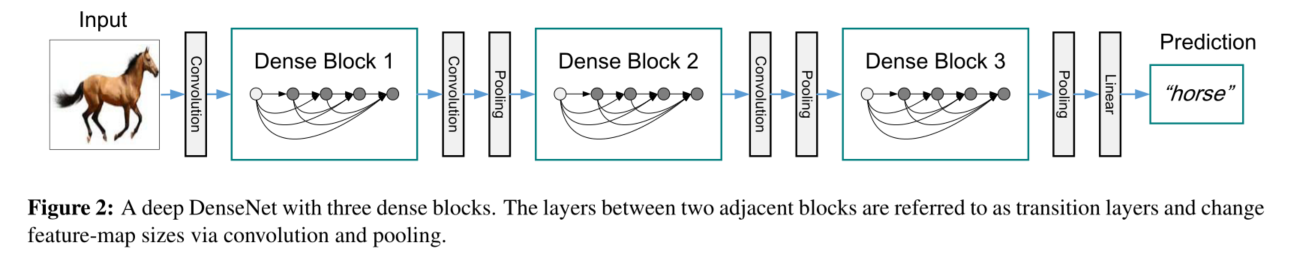
ЖдгкЭМЯёНЯаЁЕФЪ§ОнМЏ,БШШч CIFAR-10/100ЁЂSVHN,DenseNet гЩ 3 Иі Dense Block зщГЩЁЃ
- дкЪфШыЕквЛИі Dense Block жЎЧАЯШОЙ§вЛИі padding=1 ЕФ 3ЁС3 ОэЛ§,ЪфГі 32 ЭЈЕР;
- ЪЙгУ DenseNet-BC ХфжУ,дкУПИі Dense Block жЎМфМгШыЙ§ЖЩВу,ЪЙЬиеїЭМЭЈЕРЪ§КЭПэИпМѕАы;
- дкзюКѓвЛИі Dense Block ЕФФЉЮВ,жДааШЋОжЦНОљГиЛЏ,ШЛКѓСЌНг Softmax ЗжРрЦїЁЃ
ЪфШы 3 Иі Dense Block жаЕФЬиеїЭМДѓаЁЗжБ№ЮЊ:32ЁС32ЁЂ16ЁС16ЁЂ8ЁС8ЁЃВЩгУ { L = 40 , k = 12 } \{L = 40,k = 12\} {L=40,k=12} ЕФ DenseNet-BC ХфжУЁЃ
ЮхЁЂДњТыЪЕЯж
-
conv_blockЪЧ Dense Block ЕФЛљДЁНсЙЙ,АќКЌвЛВу 3ЁС3 ОэЛ§ЕФ basic_block,КЭвЛВуПЩбЁЕФ 1ЁС1 ОэЛ§ЕФ bottleneck:Йигк
nn.SequentialПЩвдВщдФЙйЗНЮФЕЕ,РяУцОйЕФР§згЪЎЗжЧхЮњвзЖЎЁЃfrom collections import OrderedDict import torch from torch import nn def conv_block(in_channels, out_channels, bo=True): """ Dense Block ЕФЛљБОзщМў, вЛВу 3ЁС3 ОэЛ§КЭвЛВуПЩбЁЕФ 1ЁС1 ОэЛ§ :param in_channels: :param out_channels: growth rate k :param bo: ЪЧЗёЪЙгУ bottleneck :return: вЛИі conv_block """ # гаЮо bottleneck ЛсгАЯьЯТУц 3ЁС3 ОэЛ§ЕФЪфШыЭЈЕРЪ§,ЫљвдвЊХаЖЯвЛЯТ in_channels_ = out_channels * 2 if bo else in_channels bo_layers = nn.Sequential(OrderedDict([ ('bn0', nn.BatchNorm2d(in_channels)), ('relu0', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, in_channels_, kernel_size=1)), ])) basic_blk = nn.Sequential(OrderedDict([ ('bn1', nn.BatchNorm2d(in_channels_)), ('relu1', nn.ReLU()), ('conv3x3', nn.Conv2d(in_channels_, out_channels, kernel_size=3, padding=1)), ])) # ШчЙћВЛгУ bottleneck ПЩвдДЋШывЛИіПеЕФ Sequential bottleneck = bo_layers if bo else nn.Sequential() blk = nn.Sequential() blk.add_module('bottleneck', bottleneck) blk.add_module('basic_blk', basic_blk) return blk -
Dense BlockЕБЧА conv_block ЕФЪфШыЪЧЧАУцЫљга conv_block ЕФЪфГіЖбЕўЦ№РДЕФ,ЫљвдЕк l l l ВуЕФЪфШыЭЈЕРЪ§ЮЊ:
k 0 + k ЁС ( l ? 1 ) k_0 + k \times (l - 1) k0?+kЁС(l?1)
k 0 k_0 k0? ЪЧГѕЪМЪфШыВуЕФЭЈЕРЪ§ k k k ОЭЪЧЩЯУцЬсЕНЕФ Growth Rate,вВОЭЪЧ conv_block жаУПИіОэЛ§ВуЕФЪфГіЭЈЕРЪ§out_channelsЁЃdef dense_block(in_channels, conv_blk_num=4, k=12, bo=True): """ dense_block гЩЩЯУцЖрИі conv_block зщГЩ,гУ for бЛЗЬэМгЕН nn.Sequential() жа :param in_channels: :param conv_blk_num: 3ЁС3ОэЛ§ВуИіЪ§ :param k: = out_channels,УПИі3ЁС3ОэЛ§ВуЕФЪфГіЭЈЕРЪ§ :param bo: ЪЧЗёМгШы bottleneck :return: вЛИі dense_block """ dense_block = nn.Sequential() for i in range(conv_blk_num): # ЕБЧА conv_block ЕФЪфШыЪЧЧАУцЫљга conv_block ЕФЪфГіЖбЕўЦ№РДЕФ,ЫљвдЪфШыЭЈЕРЪ§АДееТлЮФжаетИіЙЋЪНБфЛЏ in_channels_ = in_channels + i * k dense_block.add_module(f'conv_blk_{i}', conv_block(in_channels_, k, bo=bo)) return dense_block -
transition_layerЪЧ Dense Block жЎМфЕФЙ§ЖЩВу,гУ 1ЁС1 ОэЛ§МѕЩй Dense Block ЕФЪфГіЭЈЕРЪ§,ЗёдђЛсдНЕўдНЖр,ЕМжТФкДцБЌеЈ:def transition_layer(input, in_channels, out_channels): """ Й§ЖЩВу,дк Dense Block КЭ Dense Block жЎМф,АбЧАвЛИіЕФЪфГіЭЈЕРМѕАы :param in_channels: ЧАвЛИіЕФЪфГіЭЈЕР :param out_channels: ЪфГіЭЈЕРМѕАы :return: """ blk = nn.Sequential(OrderedDict([ ('bn', nn.BatchNorm2d(in_channels)), ('relu', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, out_channels, kernel_size=1)), ('avgpool', nn.AvgPool2d(2)) ])) return blk(input) -
ЮвУЧПЩвдЯШЪдбщвЛИіЖрВу 1ЁС1 КЭ 3ЁС3 ОэЛ§зщГЩЕФ Dense Block ЕФЭјТчНсЙЙКЭЪфГіЬиеїЭМЕФаЮзД:
def forward(x, model, transition=True): for i, blk in enumerate(model): # БщРњ dense block ЕФУПвЛВуОэЛ§,АбЫќУЧЕФЪфГіЖМЖбЕўЦ№РД print(i) y = blk(x) x = torch.cat((x, y), dim=1) print(x.shape) if transition: x = transition_layer(x, x.shape[1], x.shape[1]//2) print("x final size:", x.shape) return x if __name__ == '__main__': in_channels = 16 input = torch.randn(1, in_channels, 28, 28) # (mini-batch, channels, H, W) # print(input.shape) # bo=True дђМгШы bottleneck,гУ1ЁС1ОэЛ§МѕЩй3ЁС3ОэЛ§ЕФдЫЫуЭЈЕР dense_block = dense_block(in_channels=in_channels, conv_blk_num=4, k=12, bo=True) print(dense_block) # ДђгЁЭјТчНсЙЙ # transition=True дђАб dense_block ЕФЪфГіМѕАы output_dense = forward(input, model=dense_block, transition=False) -
DenseNet ЕФЛљДЁНсЙЙгЩ 3 Иі Dense Blocks вдМАПЩбЁЕФ Dense Block жЎМфЕФЙ§ЖЩВу(Transition layers)зщГЩ,етаЉПЩбЁзщМўЖМПЩвдЭЈЙ§ВЮЪ§РДЩшЖЈ,вђЮЊЮвУЧвбОШЋВПЪЕЯжСЫ:
from collections import OrderedDict import torch from torch import nn from torch.nn import functional as F def transition_layer(input, in_channels, out_channels): """ Й§ЖЩВу,дк Dense Block КЭ Dense Block жЎМф,АбЧАвЛИіЕФЪфГіЭЈЕРКЭГЄПэМѕАы :param in_channels: ЧАвЛИіЕФЪфГіЭЈЕР :param out_channels: ЪфГіЭЈЕРМѕАы :return: """ blk = nn.Sequential(OrderedDict([ ('bn', nn.BatchNorm2d(in_channels)), ('relu', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, out_channels, kernel_size=1)), ('avgpool', nn.AvgPool2d(2)) ])) return blk(input) def conv_block(in_channels, out_channels, bo=False): """ Dense Block ЕФЛљБОзщМў :param in_channels: :param out_channels: growth rate k :return: """ in_channels_ = out_channels * 2 if bo else in_channels bo_layers = nn.Sequential(OrderedDict([ ('bn0', nn.BatchNorm2d(in_channels)), ('relu0', nn.ReLU()), ('conv1x1', nn.Conv2d(in_channels, in_channels_, kernel_size=1)), ])) basic_blk = nn.Sequential(OrderedDict([ ('bn1', nn.BatchNorm2d(in_channels_)), ('relu1', nn.ReLU()), ('conv3x3', nn.Conv2d(in_channels_, out_channels, kernel_size=3, padding=1)), ])) bottleneck = bo_layers if bo else nn.Sequential() blk = nn.Sequential() blk.add_module('bottleneck', bottleneck) blk.add_module('basic_blk', basic_blk) return blk class DenseBlock(nn.Module): """ гЩ conv_blk зщГЩ :param in_channels: ЖЏЬЌЕФ,гЩЩЯвЛИі Dense Block КЭЙ§ЖЩВуОіЖЈ :param out_channels: growth rate k :param dense_blk_num: гЩЖрЩй conv_blk зщГЩвЛИі Dense Block """ def __init__(self, in_channels, out_channels, conv_blk_num=4, bo=False, transition=True): super(DenseBlock, self).__init__() self.transition = transition self.net = nn.Sequential() for i in range(conv_blk_num): # вЊЖрЩйОЭМгЖрЩй in_channels_ = in_channels + i * out_channels self.net.add_module(f'conv_blk_{i}', conv_block(in_channels_, out_channels, bo)) def forward(self, x): for blk in self.net: y = blk(x) x = torch.cat((x, y), dim=1) if self.transition: out_channels = x.shape[1] x = transition_layer(x, out_channels, out_channels // 2) print(x.shape) return x class DenceNet(nn.Module): """ гЩ Dense Block зщГЩ :param in_channels: 3-cifar-10, 1-mnist :param out_channels: growth rate k :param dense_blk_num: гЩЖрЩй Dense Block зщГЩ """ def __init__(self, in_channels=16, out_channels=12, conv_blk_num=4, dense_blk_num=3, bo=False, transition=True): super(DenceNet, self).__init__() self.bn0 = nn.BatchNorm2d(3) self.conv0 = nn.Conv2d(3, 16, kernel_size=3, padding=1) self.dense_net = nn.Sequential() in_channels_ = in_channels for i in range(dense_blk_num): # МЦЫуЭЈЕРЪ§,гаЕуШЦ,ЯыИуЧхГўПЩвдЪжЖЏБщРњ in_channels_ += conv_blk_num * out_channels if i > 0 else 0 in_channels_ = in_channels_ // 2 if i > 0 else in_channels_ print("in_channels_:", in_channels_) if transition: self.is_transition = dense_blk_num - 1 - i # зюКѓвЛИі dense Block ВЛгУНгЙ§ЖЩВу self.dense_net.add_module(f"dense_blk_{i}", DenseBlock(in_channels_, out_channels, conv_blk_num=conv_blk_num, bo=bo, transition=self.is_transition)) self.aap = nn.AdaptiveAvgPool2d(10) # ШЋОжЦНОљГиЛЏ,ЪфГі 10ЁС10 self.fc = nn.Linear(8800, 10) def forward(self, x): batch_size = x.size(0) x = self.conv0(F.relu(self.bn0(x))) # N,16,, x = self.dense_net(x) x = self.aap(x) x = x.view(batch_size, -1) # batchЁСЭЈЕРЪ§ЁС10ЁС10=8800 x = F.softmax(self.fc(x)) return x if __name__ == '__main__': # ФЃФтЪ§ОнЪфШыЭјТч in_channels, k = 16, 12 model = DenceNet(in_channels=in_channels, out_channels=k, conv_blk_num=4, # УПИіDense BlockжаЕФ3ЁС3ОэЛ§ИіЪ§ dense_blk_num=3, # УПИіDenseNetАќКЌЕФDense BlockИіЪ§ bo=False, transition=True ) print(model) input = torch.randn(1, 3, 32, 32) output = model(input) print("final x shape:", output.shape)
skill:дкВЛжЊЕРШЋСЌНгВуНгЪеЕФВЮЪ§ЕНЕзЮЊЖрЩйЕФЧщПіЯТ(БШШч,етРяЕФ8800),ЮвУЧПЩвдзЂЪЭЕє
self.fc()ЕФЕїгУ,ШЛКѓЙЙдьКЭбЕСЗЪ§ОнМЏвЛИі mini-batch ЯрЭЌДѓаЁЕФЪ§ОнзїЮЊ input,ЕУЕНЕФЪфГіКмЧсвзФмИцЫпФуД№АИЁЃ
Huang, Gao, et aI. ЁАDensely Connected Convolutional Networks.ЁБ IEEE Conference on Computer Vision Pattern Recognition (2017): 2261-69. ??