SuMA++:Efficient LiDAR-based Semantic SLAM
简介:
基于曲面建图(surfelbased mapping)方法的基础上,增加语义信息的融合以解决建图时移动物体的问题。语义信息是通过神经网络完成,该网络给点云中的点添加标签,建图时得到的是带有标签的曲面,1、可以滤除动态物体 2、使用语义信息对里程计进行约束,提高建图的精度
主要贡献:
- 对点云进行语义分割,根据语义信息识别动态物体,并去除
- 把带有语义标签的物体进行数据关联,和几何信息一起建立约束关系,从而提高建图精度
整体思路:
- 通过网络对点云进行语义分割
使用RangeNet++方法。
- 使用漫水填充方法消除错误的类别标签
由于网络对点云进行的语义分割必然包含正确分类和错误分类,而这里面的错误会对后续环节产生不好的影响,因此有必要对其进行消除。这一环节的主要流程如下图所示。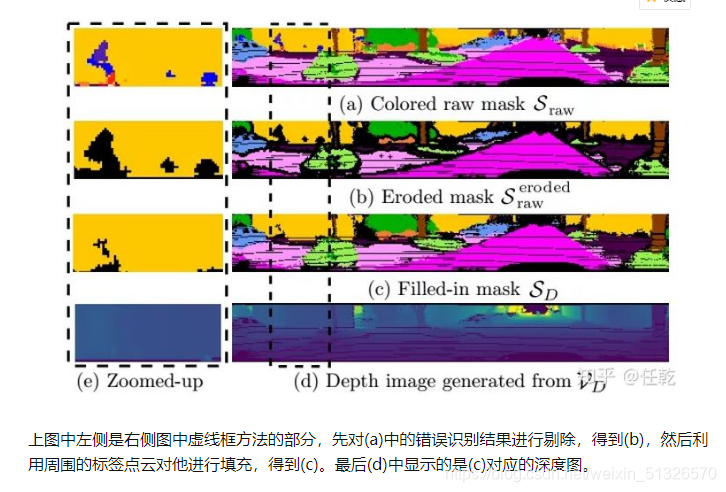
?
上图中左侧是右侧图中虚线框方法的部分,先对(a)中的错误识别结果进行剔除,得到(b),然后利用周围的标签点云对他进行填充,得到(c)。最后(d)中显示的是(c)对应的深度图。
- 使用滤波器进行动态物体检测,并移除动态物体
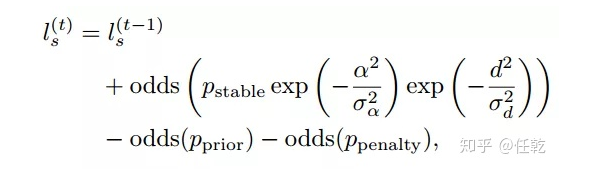
动态物体的识别是根据物体在同一位置出现的概率实现的。具体来讲,就是说如果在这一帧中,某个位置出现了物体,在下一帧中,它还在,如果连续很多帧它都出现在同一个位置,那么它就是静止的,反之,在每一帧中检测到的位置都发生变化,那么它就是移动的。当然,此处位置指的是地图中的位置,而不是相对于当前帧点云的位置。上面是为了方便理解采用的通俗的解释,实际算法实现是用下面的公式
?
这个公式其实和cartographer移除动态物体的公式很像
- 建立带语义信息约束的ICP模型,优化里程计精度
我们知道ICP对两帧点云匹配其实就是让两帧点云对应点的距离达到最小,越小说明位姿估计的越准。但它仅使用几何信息,鲁棒性不是很好。此处作者为了改进这一问题,把语义信息也加入了ICP的数据关联当中,每一个物体对应一个关联关系,进行位姿估计时,除了点云要尽量接近,带语义标签的各个物体也要尽量接近。