ͼ��任
����ͼ��ߴ�,��ת,��ת
ͼ��ƴ��
������������ͬ�߶Ȼ���ȵ�ͼ������һ��,
����ƴ��
void cv::vconcat ( const Mat * src, // ���Mat���͵�����,������ͬ,��������ͨ������ͬ
size_t nsrc, // �����к��е�Mat���͵���Ŀ,
OutputArray dst // ������
)
void cv::vconcat ( InputArray src1, // ������Mat���͵����ݽ������ӡ�
InputArray src2,
OutputArray dst
)
����ƴ��
void cv::hconcat ( const Mat * src,
size_t nsrc,
OutputArray dst
)
void cv::hconcat ( InputArray src1, //
InputArray src2,
OutputArray dst
)
#include <opencv2\opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int main()
{
//��������������
Mat matArray[] = { Mat(1, 2, CV_32FC1, cv::Scalar(1)),
Mat(1, 2, CV_32FC1, cv::Scalar(2)) };
Mat vout, hout;
vconcat(matArray, 2, vout);
cout << "ͼ��������������:" << endl << vout << endl;
hconcat(matArray, 2, hout);
cout << "ͼ�������������:" << endl << hout << endl;
//����ĺ���ƴ��
Mat A = (cv::Mat_<float>(2, 2) << 1, 7, 2, 8);
Mat B = (cv::Mat_<float>(2, 2) << 4, 10, 5, 11);
Mat vC, hC;
vconcat(A, B, vC);
cout << "���ͼ����������:" << endl << vC << endl;
hconcat(A, B, hC);
cout << "���ͼ���������:" << endl << hC << endl;
//��ȡ4����ͼ��,00��ʾ���Ͻǡ�01��ʾ���Ͻǡ�10��ʾ���½ǡ�11��ʾ���½�
Mat img00 = imread("lena00.png");
Mat img01 = imread("lena01.png");
Mat img10 = imread("lena10.png");
Mat img11 = imread("lena11.png");
if (img00.empty() || img01.empty() || img10.empty() || img11.empty())
{
cout << "��ȷ��ͼ���ļ������Ƿ���ȷ" << endl;
return -1;
}
//��ʾ4����ͼ��
imshow("img00", img00);
imshow("img01", img01);
imshow("img10", img10);
imshow("img11", img11);
//ͼ������
Mat img, img0, img1;
//ͼ���������
hconcat(img00, img01, img0);
hconcat(img10, img11, img1);
//�������ӽ���ٽ�����������
vconcat(img0, img1, img);
//��ʾ����ͼ��Ľ��
imshow("img0", img0);
imshow("img1", img1);
imshow("img", img);
waitKey(0);
return 0;
}
�ߴ�任
�ı䳤�Ϳ�,ʵ��ͼ������š�
void cv::resize ( InputArray src,
OutputArray dst,
Size dsize, // ���ͼ��ijߴ�
double fx = 0, // ˮƽ�ı�������,��������2
double fy = 0, // ��dsizeΪ
int interpolation = INTER_LINEAR // ��ֵ����
)
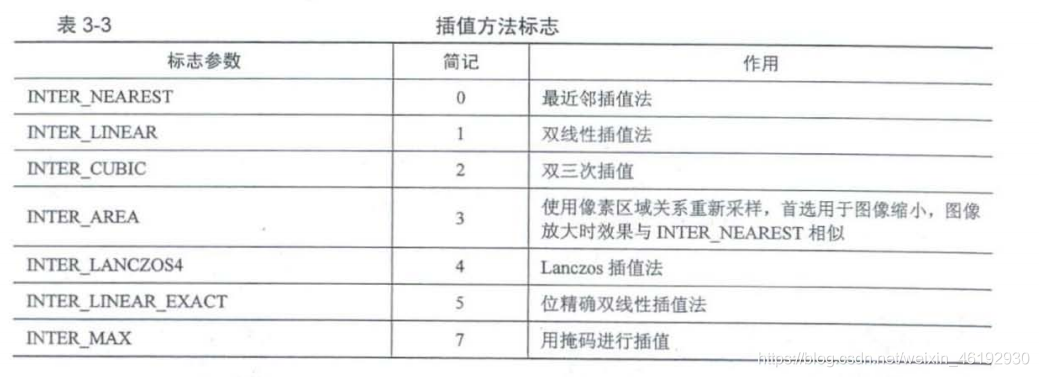
��Сͼ��,��INTER_AREA , �Ŵ�ͼ�� INTER_CUBIC OR INTER_LINEAR��
void cv::flip(InputArray src, // ͼ��ת
OutputArray dst,
int flipCode // ����0 ,y�ᷭת ,����0 x�ᷭת, С��0�����ᷭת
}
#include <opencv2\opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int main()
{
Mat gray = imread("lena.png", 0);
Mat smallImg, bigImg0, bigImg1, bigImg2;
resize(gray, smallImg, Size(15, 15), 0, 0, INTER_AREA); // ����С
resize(smallImg, bigImg0, Size(30, 30), 0, 0, INTER_NEAREST); //����ڲ�ֵ
resize(smallImg, bigImg1, Size(30, 30), 0, 0, INTER_LINEAR); //˫���Բ�ֵ
resize(smallImg, bigImg2, Size(30, 30), 0, 0, INTER_CUBIC); //˫���β�ֵ
namedWindow("smallImg", 0); //ͼ��ߴ�̫С,һ��Ҫ���ÿ��Ե��ڴ��ڴ�С��־
imshow("smallImg", smallImg);
namedWindow("bigImg0", 0);
imshow("bigImg0", bigImg0);
namedWindow("bigImg1", 0);
imshow("bigImg1", bigImg1);
namedWindow("bigImg2", 0);
imshow("bigImg2", bigImg2);
Mat img_x, img_y, img_xy;
flip(gray, img_x, 0); // ͼ��ת,x, y, xy��Գ�
flip(gray, img_y, 1);
flip(gray, img_xy, -1);
imshow("img_xy", img_xy);
waitKey(0);
return 0;
}
ͼ�����任
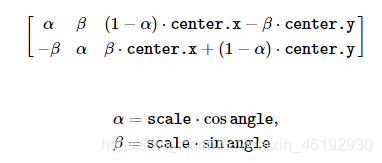
ͼ�����ת,ͨ������ʵ�֡�����ȷ����ת�ǶȺ�����,ȷ����ת����,���з���任��
Mat cv::getRotationMatrix2D ( Point2f center, // ��ת����λ��
double angle, // �Ƕ�,��λ��,��ֵ��ʱ����ת
double scale // ������ı�������,ʵ��ͼ�������
) // ������ת����,Mat����
�õ���ת�����,ͨ��warpAffine() �������з���任,ʵ����ת��
void cv::warpAffine ( InputArray src,
OutputArray dst, // ���ͼ,������������ͬ,�ߴ���dsize��ͬ
InputArray M, // �õ�����ת����
Size dsize,
int flags = INTER_LINEAR, // ��ֵ��ʽ
int borderMode = BORDER_CONSTANT, //���ر߽����Ʒ�ʽ
const Scalar & borderValue = Scalar() // ���߽��ֵ,Ĭ��0
)

����任������ת,ƽ��,���Ų������ܳ�,���Ա�ʾΪ���Ա任��ƽ�Ʊ任�ĵ��ӡ���ѧ��������ȳ���һ�����Ա任����(2 X 2),Ȼ�����һ��ƽ������(2X1)����������һ��(2X3)�ı任����
M = [ A B ] = �O a 00 a 01 b 00 a 10 a 11 b 10 �O �� �� ֵ [ x , y ] T T = A [ x y ] + B M = [A\quad B]= \left\vert\begin{matrix} a_{00} & a_{01} & b_{00} \\ a_{10} & a_{11} & b_{10} \end{matrix} \right\vert ����ֵ[x,y]^T \qquad T = A\left[\begin{matrix}x\\y\end{matrix}\right] + B M=[AB]=�O�O�O�O?a00?a10??a01?a11??b00?b10??�O�O�O�O?����ֵ[x,y]TT=A[xy?]+B
���֪���任������ͼ����3�����ص�����Ķ�Ӧ��ϵ,�Ϳ�����ñ任����M,getAffineTransform()����������Ӧ�����ص�ȷ��M��
Mat cv::getAffineTransform ( const Point2f src[], // ԭͼ���3����������,��˳����
const Point2f dst[]
)
int main()
{
Mat img = imread("lena.png");
Mat rotation0, rotation1, img_warp0, img_warp1;
double angle = 30; //����ͼ����ת�ĽǶ�
Size dst_size(img.rows, img.cols); //�������ͼ��ijߴ�
Point2f center(img.rows / 2.0, img.cols / 2.0); //����ͼ�����ת����
rotation0 = getRotationMatrix2D(center, angle, 1); //�������任����
warpAffine(img, img_warp0, rotation0, dst_size); //���з���任
imshow("img_warp0", img_warp0);
//���ݶ������������з���任
Point2f src_points[3];
Point2f dst_points[3];
src_points[0] = Point2f(0, 0); //ԭʼͼ���е�������,������
src_points[1] = Point2f(0, (float)(img.cols - 1));
src_points[2] = Point2f((float)(img.rows - 1), (float)(img.cols - 1));
dst_points[0] = Point2f((float)(img.rows)*0.11, (float)(img.cols)*0.20); //����任��ͼ���е�������
dst_points[1] = Point2f((float)(img.rows)*0.15, (float)(img.cols)*0.70);
dst_points[2] = Point2f((float)(img.rows)*0.81, (float)(img.cols)*0.85);
rotation1 = getAffineTransform(src_points, dst_points); //���ݶ�Ӧ����ȡ����任����
warpAffine(img, img_warp1, rotation1, dst_size); //���з���任
imshow("img_warp1", img_warp1);
waitKey(0);
return 0;
}
�ӱ任
������ͶӰ���µ�ƽ�档��ǰ��ı任��ϵ����ʹ��һ�� 3X3 �ı任�����ʾ,����������ͨ������ͼ����4 ����Ӧ���������ȡ��getPerspectiveTransform() warpPerspective() �ֱ����ڻ�ȡ����,�����ӱ任��
Mat cv::getPerspectiveTransform ( const Point2f src[],
const Point2f dst[],
int solveMethod = DECOMP_LU // Ĭ�Ͼ���
)
void cv::warpPerspective ( InputArray src,
OutputArray dst,
InputArray M, // 3X3�ı任����
Size dsize, // ���ͼ��ijߴ�
int flags = INTER_LINEAR, // ��������һ��
int borderMode = BORDER_CONSTANT,
const Scalar & borderValue = Scalar()
)
Point2f src_points[4];
Point2f dst_points[4];
//ͨ��Image Watch�鿴�Ķ�ά���ĸ��ǵ�����
src_points[0] = Point2f(94.0, 374.0);
src_points[1] = Point2f(507.0, 380.0);
src_points[2] = Point2f(1.0, 623.0);
src_points[3] = Point2f(627.0, 627.0);
//�����ӱ任���ά���ĸ��ǵ������
dst_points[0] = Point2f(0.0, 0.0);
dst_points[1] = Point2f(627.0, 0.0);
dst_points[2] = Point2f(0.0, 627.0);
dst_points[3] = Point2f(627.0, 627.0);
Mat rotation, img_warp;
rotation = getPerspectiveTransform(src_points, dst_points); //�����ӱ任����
warpPerspective(img, img_warp, rotation, img.size()); //�ӱ任ͶӰ
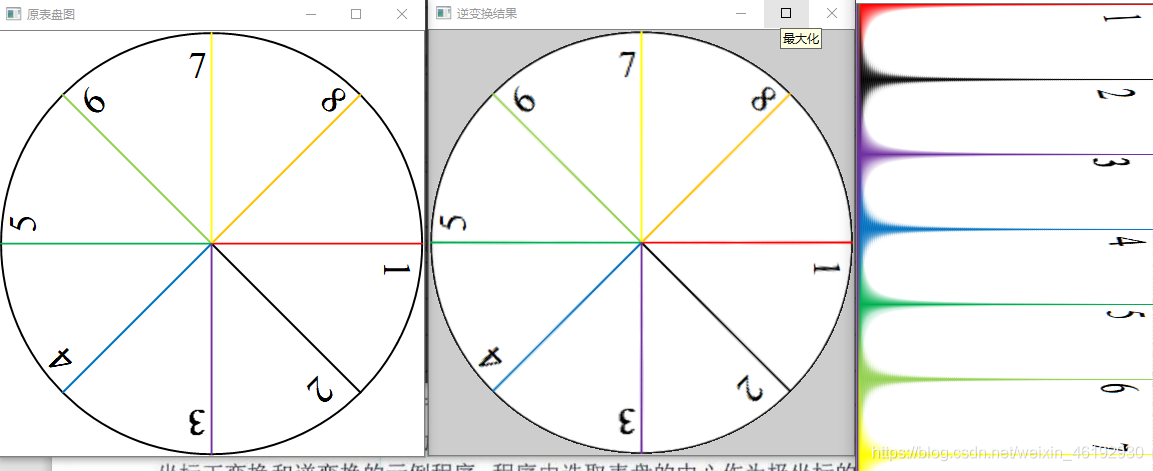
������任
ֱ������ϵ�ͼ�����ϵ�еı任,���Խ�һ��Բ��ͼ����һ������ͼ���Դ����ӱ�,Բ�̵�,Բ��ͼ����Ե�ϵ����־���������任����Դ�ֱ����������ͼ��ı�Ե,���ڶ����ֽ���ʶ��ͼ�⡣
void cv::warpPolar ( InputArray src,
OutputArray dst,
Size dsize,
Point2f center, // �������ԭ������
double maxRadius, // �任ʱ�߽�Բ�İ뾶,��������任ʱ�ı�������
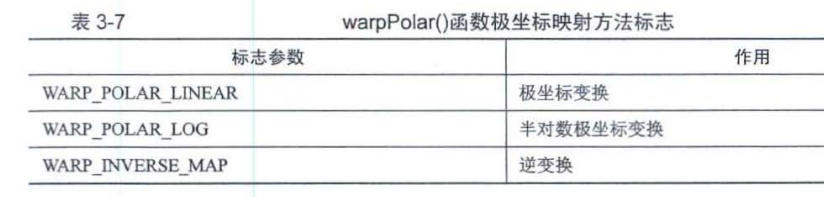
int flags // ��ֵ����,�뼫����ӳ�䷽����־,��������ͨ��+ |����
)
int main()
{
Mat img = imread("dial.png");
Mat img1, img2;
Point2f center = Point2f(img.cols / 2, img.rows / 2); //��������ͼ���е�ԭ��
//��������任
warpPolar(img, img1, Size(300, 600), center, center.x, INTER_LINEAR + WARP_POLAR_LINEAR);
//�漫����任
warpPolar(img1, img2, Size(img.rows, img.cols), center, center.x,
INTER_LINEAR + WARP_POLAR_LINEAR + WARP_INVERSE_MAP);
imshow("ԭ����ͼ", img);
imshow("���̼�����任���", img1);
imshow("��任���", img2);
waitKey(0);
return 0;
}