����Ŀ¼
���ű�Ե��
? ? Canny ��Ŀ�����ҵ�һ�����ŵı�Ե����㷨,���ű�Ե���ĺ�����:
? ? (1)���ż��:�㷨�ܹ������ܶ�ر�ʶ��ͼ���е�ʵ�ʱ�Ե,©����ʵ��Ե�ĸ��ʺ����DZ�Ե�ĸ��ʶ�������С;
? ? (2)���Ŷ�λ��:���ı�Ե���λ�þ���ʵ�ʱ�Ե���λ�����,��������������Ӱ����������ı�Եƫ���������ʵ��Ե�ij̶���С;
? ? (3)�������Ե��һһ��Ӧ:���Ӽ��ı�Ե����ʵ�ʱ�Ե��Ӧ����һ һ��Ӧ��
�㷨ʵ�ֲ���
? ? Canny��Ե����㷨���Է�Ϊ����5������:
1. Ӧ�ø�˹�˲���ƽ��(ģ��)ͼ��,Ŀ����ȥ������
? ? ��˹�˲����ǽ���˹������ɢ��,���˲����ж�Ӧ�ĺ��������������뵽��˹����,�Ӷ��õ���Ӧ��ֵ��
? ? ��ά�ĸ�˹��������:���� (x , y)Ϊ����, �� Ϊ����
H
(
x
,
y
)
=
1
2
��
��
2
e
?
x
2
+
y
2
2
��
2
(1)
H(x,y) = \frac{1}{2\pi ��^2} e^{- \frac{x^2 + y^2}{2��^2}} \tag1
H(x,y)=2����21?e?2��2x2+y2?(1)
? ? ��ͬ�ߴ���˲���,�õ���ֵҲ��ͬ,������ (2k+1)x(2k+1) �˲����ļ��㹫ʽ :
H
[
i
,
j
]
=
1
2
��
��
2
e
?
(
i
?
k
?
1
)
2
+
(
j
?
k
?
1
)
2
2
��
2
(2)
H[i,j] = \frac{1}{2\pi ��^2} e^{- \frac{(i-k-1)^2 + (j-k-1)^2}{2��^2}} \tag2
H[i,j]=2����21?e?2��2(i?k?1)2+(j?k?1)2?(2)
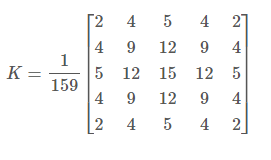
? ? �����ĸ�˹�˲�����СΪ 5*5, �� = 1.4 ,�����ֵΪ:
2. �����ݶ�ǿ�Ⱥͷ���
? ? ������,����ҪѰ�ұ�Ե,���Ҷ�ǿ�ȱ仯��ǿ��λ��,(һ���ڱ�һ���ױ��м���DZ�Ե,���ĻҶ�ֵ�仯������)����ͼ����,���ݶ�����ʾ�Ҷ�ֵ�ı仯�̶Ⱥͷ���
? ? ������������Sobel�˲�����ˮƽx�ʹ�ֱy�����ڼ����ݶȺͷ���
ˮƽ�����Sobel����Gx:������� y ����ı�Ե
| -1 | 0 | 1 |
|---|---|---|
| -2 | 0 | 2 |
| -1 | 0 | 1 |
? ? ��ֱ�����Sobel����Gy:������� x ����ı�Ե( ��Ե������ݶȷ���ֱ)
| 1 | 2 | 1 |
|---|---|---|
| 0 | 0 | 0 |
| -1 | -2 | -1 |
? ? �������й�ʽ�����ݶȺͷ���:
G
=
(
G
x
2
+
G
y
2
)
(3)
G = \sqrt{(G_x^2 + G_y^2)} \tag3
G=(Gx2?+Gy2?)?(3)
��
=
a
r
c
t
a
n
G
y
G
x
(4)
\theta = arctan{\frac{G_y}{G_x}} \tag4
��=arctanGx?Gy??(4)
3. Ӧ�÷�������Ƽ���NMS�����������
ԭ��:�����ݶȾ����ϵ����е�,��������Ե�����Ͼ��м���ֵ������
? ? ��һ����Ŀ���ǽ�ģ��(blurred)�ı߽�������(sharp)��ͨ�Ľ�,���DZ�����ÿ�����ص����ݶ�ǿ�ȵļ���ֵ,��ɾ��������ֵ������ÿ�����ص�,�������²���:
? ? a) �����ݶȷ������Ϊ����ֵ�е�һ��(0,45,90,135,180,225,270,315)(���������Һ�45�ȷ���)
? ? b) �Ƚϸ����ص�,�����ݶȷ���������������ص���ݶ�ǿ��
? ? c) ��������ص��ݶ�ǿ���������,��������(ɾ��,����Ϊ0)
M
T
(
m
,
n
)
=
{
M
(
m
,
n
)
,
if?M(m,n)?>?T
0
,
otherwise
M_T(m,n) = \begin{cases} M(m,n), & \text {if M(m,n) > T}\\ 0, & \text {otherwise} \end{cases}
MT?(m,n)={M(m,n),0,?if?M(m,n)?>?Totherwise?
����:������������ Python - Opencv ֮ Canny ��Ե��� ��
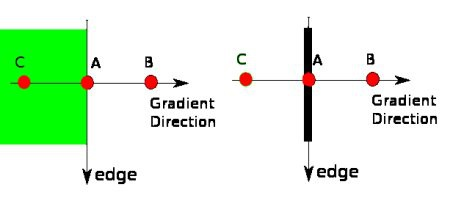
? ? �� A λ��ͼ���Ե��ֱ����. �ݶȷ��� ��ֱ�ڱ�Ե. �� B �͵� C λ���ݶȷ���. ���,���� A �͵� B,�� C,ȷ����A�Ƿ��Ǿֲ����ֵ. ����� A �Ǿֲ����ֵ,�������һ����;����� A ���Ǿֲ����ֵ,���䱻������Ϊ0��
? ? ���ᱣ��һ���߽紦������һ��ϸ��
4. Ӧ��˫��ֵ�ķ������������ܵ�(DZ�ڵ�)�߽�
? ? ����ξ�����Щ��Ե�������ı�Ե,��Щ��Ե���������ı�Ե
? ? �����Ǽ������ƺ�ͼ������Ȼ�кܶ������㡣Canny�㷨��Ӧ����һ�ֽ�˫��ֵ�ļ��������趨һ����ֵ�Ͻ�maxVal����ֵ�½�minVal,ͼ���е����ص����������ֵ�Ͻ�����Ϊ��Ȼ�DZ߽�(��Ϊǿ�߽�,strong edge),С����ֵ�½�����Ϊ��Ȼ���DZ߽�,����֮�������Ϊ�Ǻ�ѡ��(��Ϊ���߽�,weak edge),����н�һ���������������ȷ��Ϊ��Ե�����ص��ڽ�,���ж�Ϊ��Ե;����Ϊ�DZ�Ե��
5. �����ͺ��������ٱ߽�
? ? ������ǽ�һ���������߽�
? ? ����˼����,��ǿ�߽����������߽���Ϊ�DZ߽�,���������߽������ơ�
? ? ����ʵ��Ե���������Ե���ؽ����ӵ�ǿ��Ե����,��������Ӧδ���ӡ�Ϊ�˸��ٱ�Ե����,ͨ���鿴����Ե���ؼ���8����������,ֻҪ����һ��Ϊǿ��Ե����,�������Ե��Ϳ��Ա���Ϊ��ʵ�ı�Ե��
opencvʵ��Canny��Ե���
OpenCV �ṩ�� cv2.canny ����.
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
���� image - ����ͼƬ,����Ϊ��ͨ���ĻҶ�ͼ
���� threshold1 �� threshold2 - �ֱ��Ӧ����ֵ minVal �� maxVal
���� apertureSize - ���ڼ���ͼƬ��ȡ�� Sobel kernel �ߴ�. Ĭ��Ϊ 3.
���� L2gradient - ָ�������ݶȵĵ�ʽ. ������Ϊ True ʱ,���� �ݶȼ��㹫ʽ(3)(4),�侫�ȸ���;������õ��ݶȼ��㹫ʽΪ:
G
=
�O
G
x
�O
+
�O
G
y
�O
G = |G_x| + |G_y|
G=�OGx?�O+�OGy?�O. �ò���Ĭ��Ϊ False.
e.g.
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('test.jpg',0)
edges = cv.Canny(img, 100, 200)
plt.subplot(121),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
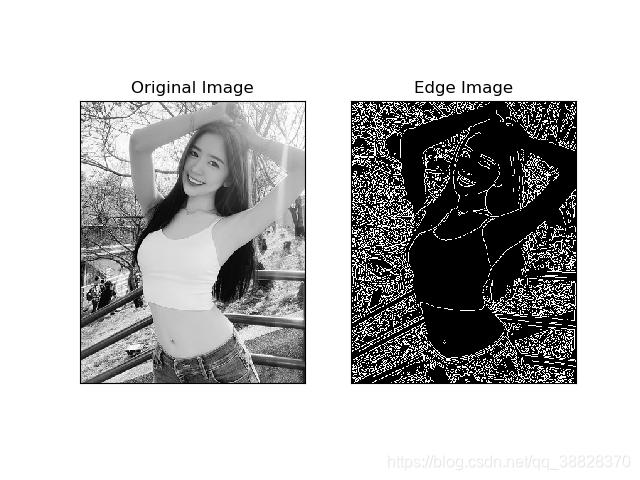
plt.show()
�������ͼ:
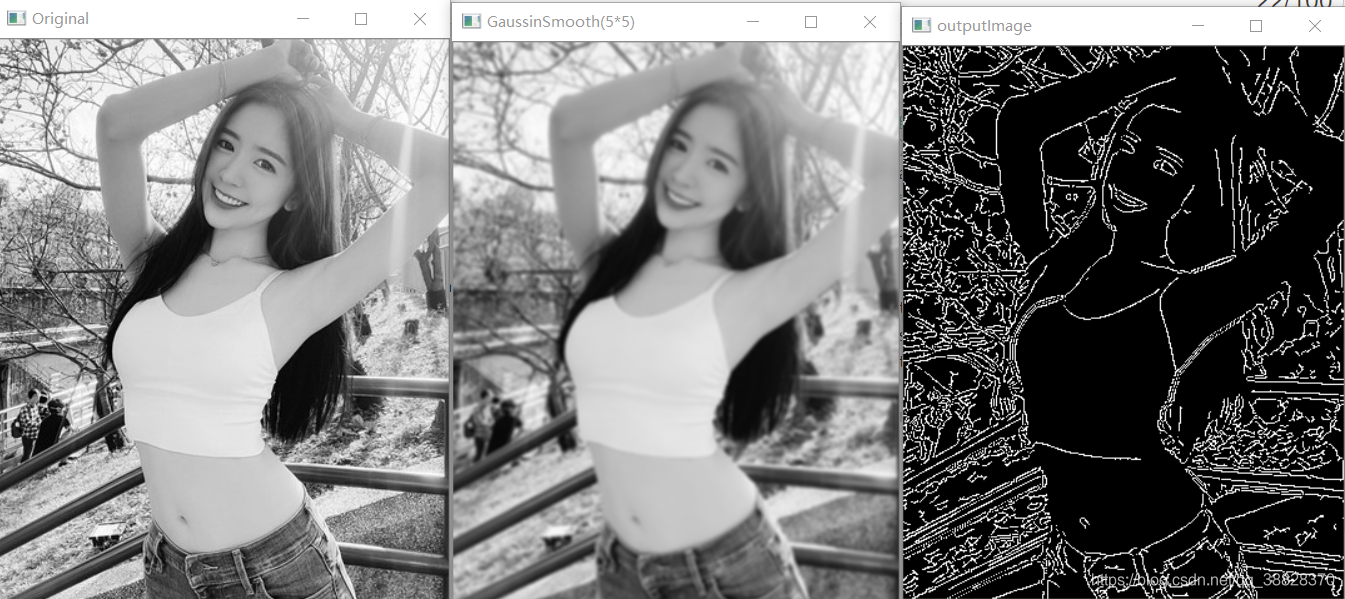
�����
����:�˲��ִ��롾from Pythonʵ��Canny���ӱ�Ե�����
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
def smooth(image, sigma = 1.4, length = 5):
""" Smooth the image
Compute a gaussian filter with sigma = sigma and kernal_length = length.
Each element in the kernal can be computed as below:
G[i, j] = (1/(2*pi*sigma**2))*exp(-((i-k-1)**2 + (j-k-1)**2)/2*sigma**2)
Then, use the gaussian filter to smooth the input image.
Args:
image: array of grey image
sigma: the sigma of gaussian filter, default to be 1.4
length: the kernal length, default to be 5
Returns:
the smoothed image
"""
# Compute gaussian filter
k = length // 2
gaussian = np.zeros([length, length])
for i in range(length):
for j in range(length):
gaussian[i, j] = np.exp(-((i-k) ** 2 + (j-k) ** 2) / (2 * sigma ** 2))
gaussian /= 2 * np.pi * sigma ** 2
# Batch Normalization
gaussian = gaussian / np.sum(gaussian)
# Use Gaussian Filter
W, H = image.shape
new_image = np.zeros([W - k * 2, H - k * 2])
for i in range(W - 2 * k):
for j in range(H - 2 * k):
# ��������
new_image[i, j] = np.sum(image[i:i+length, j:j+length] * gaussian)
new_image = np.uint8(new_image)
return new_image
def get_gradient_and_direction(image):
""" Compute gradients and its direction
Use Sobel filter to compute gradients and direction.
-1 0 1 -1 -2 -1
Gx = -2 0 2 Gy = 0 0 0
-1 0 1 1 2 1
Args:
image: array of grey image
Returns:
gradients: the gradients of each pixel
direction: the direction of the gradients of each pixel
"""
Gx = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
Gy = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
W, H = image.shape
gradients = np.zeros([W - 2, H - 2])
direction = np.zeros([W - 2, H - 2])
for i in range(W - 2):
for j in range(H - 2):
dx = np.sum(image[i:i+3, j:j+3] * Gx)
dy = np.sum(image[i:i+3, j:j+3] * Gy)
gradients[i, j] = np.sqrt(dx ** 2 + dy ** 2)
if dx == 0:
direction[i, j] = np.pi / 2
else:
direction[i, j] = np.arctan(dy / dx)
gradients = np.uint8(gradients)
return gradients, direction
def NMS(gradients, direction):
""" Non-maxima suppression
Args:
gradients: the gradients of each pixel
direction: the direction of the gradients of each pixel
Returns:
the output image
"""
W, H = gradients.shape
nms = np.copy(gradients[1:-1, 1:-1])
for i in range(1, W - 1):
for j in range(1, H - 1):
theta = direction[i, j]
weight = np.tan(theta)
if theta > np.pi / 4:
d1 = [0, 1]
d2 = [1, 1]
weight = 1 / weight
elif theta >= 0:
d1 = [1, 0]
d2 = [1, 1]
elif theta >= - np.pi / 4:
d1 = [1, 0]
d2 = [1, -1]
weight *= -1
else:
d1 = [0, -1]
d2 = [1, -1]
weight = -1 / weight
g1 = gradients[i + d1[0], j + d1[1]]
g2 = gradients[i + d2[0], j + d2[1]]
g3 = gradients[i - d1[0], j - d1[1]]
g4 = gradients[i - d2[0], j - d2[1]]
grade_count1 = g1 * weight + g2 * (1 - weight)
grade_count2 = g3 * weight + g4 * (1 - weight)
if grade_count1 > gradients[i, j] or grade_count2 > gradients[i, j]:
nms[i - 1, j - 1] = 0
return nms
def double_threshold(nms, threshold1, threshold2):
""" Double Threshold
Use two thresholds to compute the edge.
Args:
nms: the input image
threshold1: the low threshold
threshold2: the high threshold
Returns:
The binary image.
"""
visited = np.zeros_like(nms)
output_image = nms.copy()
W, H = output_image.shape
def dfs(i, j):
if i >= W or i < 0 or j >= H or j < 0 or visited[i, j] == 1:
return
visited[i, j] = 1
if output_image[i, j] > threshold1:
output_image[i, j] = 255
dfs(i-1, j-1)
dfs(i-1, j)
dfs(i-1, j+1)
dfs(i, j-1)
dfs(i, j+1)
dfs(i+1, j-1)
dfs(i+1, j)
dfs(i+1, j+1)
else:
output_image[i, j] = 0
for w in range(W):
for h in range(H):
if visited[w, h] == 1:
continue
if output_image[w, h] >= threshold2:
dfs(w, h)
elif output_image[w, h] <= threshold1:
output_image[w, h] = 0
visited[w, h] = 1
for w in range(W):
for h in range(H):
if visited[w, h] == 0:
output_image[w, h] = 0
return output_image
if __name__ == "__main__":
# code to read image
image = cv.imread('test.jpg',0)
cv.imshow("Original",image)
smoothed_image = smooth(image)
cv.imshow("GaussinSmooth(5*5)",smoothed_image)
gradients, direction = get_gradient_and_direction(smoothed_image)
# print(gradients)
# print(direction)
nms = NMS(gradients, direction)
output_image = double_threshold(nms, 40, 100)
cv.imshow("outputImage",output_image)
cv.waitKey(0)
�������ͼ: