��Ƶ��ʾ:
��Rt-threadƽ̨ʹ��LD3320����ʶ�������-����������https://b23.tv/5m9OXt
ǰ��
�����������ô����,��ô����ÿ���������,�����Ϲ�������������ϵͳRT-Thread,���ڸ�С�ɸ�һ��ѧϰRT-Thread SPI�豸������ʹ��,�����RT-Threadϵͳ�ϲ���LD3320��
SPIͨѶЭ�����
ע:�˲���ժ��rt-thread����
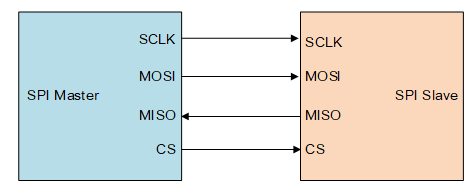
SPI(Serial Peripheral Interface,��������ӿ�)��һ�ָ��١�ȫ˫����ͬ��ͨ������,�����ڶ̾���ͨѶ,��ҪӦ���� EEPROM��FLASH��ʵʱʱ�ӡ�AD ת���������������źŴ������������źŽ�����֮�䡣SPI һ��ʹ�� 4 ����ͨ��,����ͼ��ʾ:
-
MOSI �C������� / �ӻ�����������(SPI Bus Master Output/Slave Input)��
-
MISO �C�������� / �ӻ����������(SPI Bus Master Input/Slave Output)��
-
SCLK �C����ʱ����(Serial Clock),���豸���ʱ���ź������豸��
-
CS �C���豸ѡ���� (Chip select)��Ҳ�� SS��CSB��CSN��EN ��,���豸���Ƭѡ�ź������豸��
SPI �����ӷ�ʽ����,ͨ����һ�����豸��һ���������豸��ͨ�������豸����,���豸ͨ�� CS ѡ��Ҫͨ�ŵĴ��豸,Ȼ��ͨ�� SCLK �����豸�ṩʱ���ź�,����ͨ�� MOSI ��������豸,ͬʱͨ�� MISO ���մ��豸���͵����ݡ�
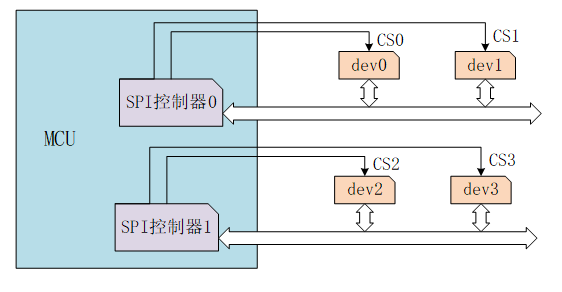
����ͼ��ʾоƬ�� 2 �� SPI ������,SPI ��������Ӧ SPI ���豸,ÿ�� SPI �������������Ӷ�� SPI ���豸��������ͬһ�� SPI �������ϵĴ��豸���� 3 ���ź�����:SCK��MISO��MOSI,��ÿ�����豸�� CS �����Ƕ����ġ�
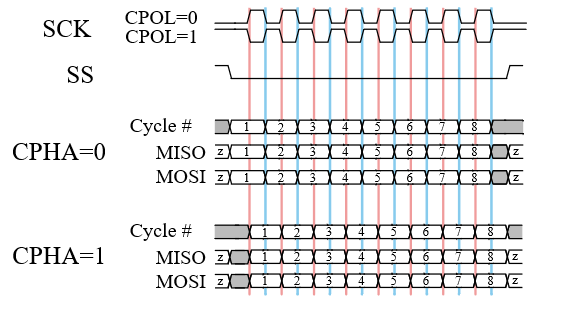
���豸��ʱ�������豸ͨ�� SCLK �ṩ,MOSI��MISO ����ڴ�����������ݴ��䡣SPI �Ĺ���ʱ��ģʽ�� CPOL(Clock Polarity,ʱ�Ӽ���)�� CPHA(Clock Phase,ʱ����λ)֮�����λ��ϵ����,CPOL ��ʾʱ���źŵij�ʼ��ƽ��״̬,CPOL Ϊ 0 ��ʾʱ���źų�ʼ״̬Ϊ�͵�ƽ,Ϊ 1 ��ʾʱ���źŵij�ʼ��ƽ�Ǹߵ�ƽ��CPHA ��ʾ���ĸ�ʱ���ز�������,CPHA Ϊ 0 ��ʾ����ʱ�ӱ仯�ز�������,�� CPHA Ϊ 1 ���ʾ�ڵڶ���ʱ�ӱ仯�ز������ݡ�
���� CPOL �� CPHA �IJ�ͬ��Ϲ��� 4 �ֹ���ʱ��ģʽ:
-
CPOL=0,CPHA=0
-
CPOL=0,CPHA=1
-
CPOL=1,CPHA=0
-
CPOL=1,CPHA=1������ͼ��ʾ:
RT-Thread IIC�豸����ʹ��
1������SPI�豸
����ԭ��:
rt_err_t?rt_spi_bus_attach_device(struct?rt_spi_device?*device,
??????????????????????????????????const?char???????????*name,
??????????????????????????????????const?char???????????*bus_name,
??????????????????????????????????void?????????????????*user_data)
| ���� | ���� |
|---|---|
| device | SPI�豸���� |
| name | SPI�豸���� |
| bus_name | SPI�������� |
| user_data | �û�����ָ�� |
| ���� | -- |
| busRET_EOK_name | �ɹ� |
| ���������� | ʧ�� |
�˺�����Ҫ����������һ�� SPI �豸��ָ���� SPI ����,�����ں�ע�� SPI �豸,���� user_data ���浽 SPI �豸�Ŀ��ƿ��
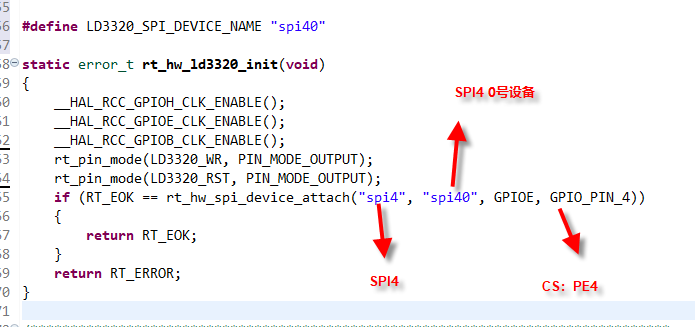
һ�� SPI ��������ԭ��Ϊ spix, SPI �豸����ԭ��Ϊ spixy ,�� spi10 ��ʾ������ spi1 �����ϵ� 0 ���豸��user_data һ��Ϊ SPI �豸�� CS ����ָ��,�������ݴ���ʱ SPI ����������������Ž���Ƭѡ��
��˵�����ٰ�ʽ,������DZ���Ҫ������LD3320��������������������ʹ��
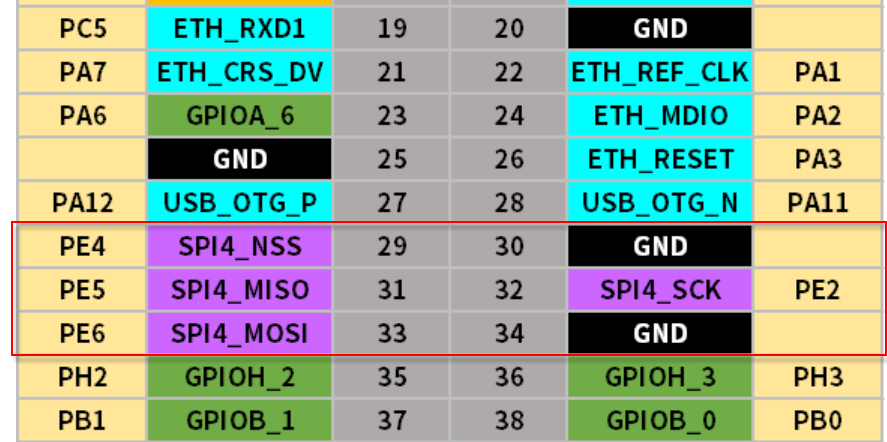
������SPI4Ϊ��,CS����ѡ��PE4
����SPI
��Ҫ�漰SPIͨѶģʽ,���ͨѶ����,����ģʽ�Ȳ���,������ô���ÿ��ӻ���ʲôģʽ,����������ƥ�䡣
���� SPI �豸�� SPI ���ߺ���Ҫ���� SPI �豸�Ĵ��������
����ԭ��:
rt_err_t?rt_spi_configure(struct?rt_spi_device?*device,
??????????????????????????struct?rt_spi_configuration?*cfg)
| ���� | ���� |
|---|---|
| device | SPI �豸��� |
| cfg | SPI ���ò���ָ�� |
| ���� | --- |
| RT_EOK | �ɹ� |
�ⲿ�־����������ǵ�cubemx�й���SPI������,������struct rt_spi_configuration �ṹ����ԭ������:
struct?rt_spi_configuration
{
????rt_uint8_t?mode;????????/*?ģʽ?*/
????rt_uint8_t?data_width;??/*?���ݿ���,��ȡ8λ��16λ��32λ?*/
????rt_uint16_t?reserved;???/*?����?*/
????rt_uint32_t?max_hz;?????/*?���Ƶ��?*/
};
ģʽ:���� MSB/LSB������ģʽ�� ʱ��ģʽ��,��ȡ���������:
/*?�������ݴ���˳����MSBλ��ǰ����LSBλ��ǰ?*/
#define?RT_SPI_LSB??????(0<<2)????????????????????????/*?bit[2]:?0-LSB?*/
#define?RT_SPI_MSB??????(1<<2)????????????????????????/*?bit[2]:?1-MSB?*/
/*?����SPI������ģʽ?*/
#define?RT_SPI_MASTER???(0<<3)????????????????????????/*?SPI?master?device?*/
#define?RT_SPI_SLAVE????(1<<3)????????????????????????/*?SPI?slave?device?*/
/*?����ʱ�Ӽ��Ժ�ʱ����λ?*/
#define?RT_SPI_MODE_0???(0?|?0)???????????????????????/*?CPOL?=?0,?CPHA?=?0?*/
#define?RT_SPI_MODE_1???(0?|?RT_SPI_CPHA)?????????????/*?CPOL?=?0,?CPHA?=?1?*/
#define?RT_SPI_MODE_2???(RT_SPI_CPOL?|?0)?????????????/*?CPOL?=?1,?CPHA?=?0?*/
#define?RT_SPI_MODE_3???(RT_SPI_CPOL?|?RT_SPI_CPHA)???/*?CPOL?=?1,?CPHA?=?1?*/
#define?RT_SPI_CS_HIGH??(1<<4)????????????????????????/*?Chipselect?active?high?*/
#define?RT_SPI_NO_CS????(1<<5)????????????????????????/*?No?chipselect?*/
#define?RT_SPI_3WIRE????(1<<6)????????????????????????/*?SI/SO?pin?shared?*/
#define?RT_SPI_READY????(1<<7)????????????????????????/*?Slave?pulls?low?to?pause?*/
-
���ݿ���:���� SPI ���豸�� SPI ���豸�ɷ��ͼ����յ����ݿ��ȸ�ʽ����Ϊ8λ��16λ����32λ��
-
���Ƶ��:�������ݴ���IJ�����,ͬ������ SPI ���豸�� SPI ���豸�����IJ����ʷ�Χ���á�
����ʾ��������ʾ(��������豸Ҫ��):
????struct?rt_spi_configuration?cfg;
????cfg.data_width?=?8;
????cfg.mode?=?RT_SPI_MASTER?|?RT_SPI_MODE_0?|?RT_SPI_MSB;
????cfg.max_hz?=?20?*?1000?*1000;???????????????????????????/*?20M?*/
????rt_spi_configure(spi_dev,?&cfg);
���� SPI �豸
һ������� MCU �� SPI ����������Ϊ�����ʹӻ�ͨѶ,�� RT-Thread �н� SPI ��������Ϊ SPI �����豸,Ӧ�ó���ʹ�� SPI �豸�����ӿ������� SPI �ӻ�����,��Ҫ�ӿ�������ʾ:
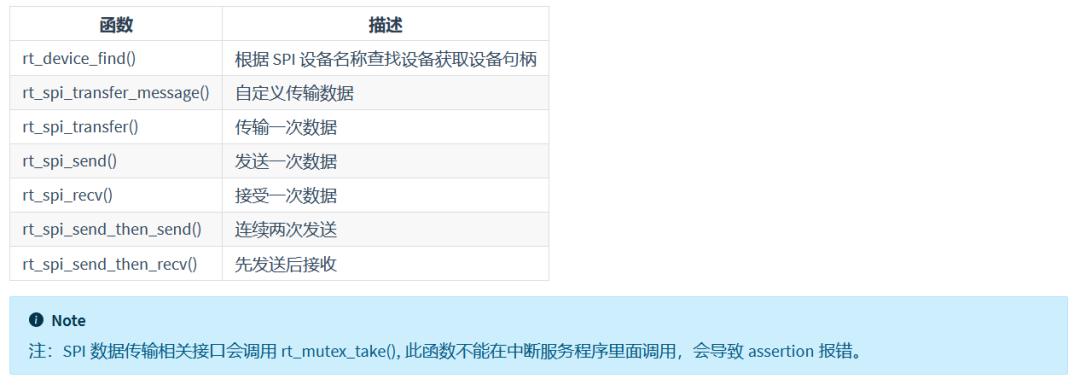
���͡����պ����кü���,������������send��receive����,�Ͳ���ռ��ƪ��,һһ������,�������Ҫ����rt_spi_transfer_message() �Զ������ݴ��亯��,һ��Ҫע��,SPI��صĺ�����Ҫ���ж��е���
-
���� SPI �豸
��ǰ���½�:IIC�豸������� һ��,SPIҲ��Ҫ�Ȳ���SPI�豸:
rt_device_t rt_device_find(const char* name);
| ���� | ���� |
|---|---|
| name | �豸���� |
| ���� | --- |
| �豸��� | ���ҵ���Ӧ�豸��������Ӧ���豸��� |
| RT_NULL | û���ҵ���Ӧ���豸���� |
���LD3320,����SPI����ΪSPI4,������:
struct?rt_spi_device?*spi_dev_ld3320;?
????spi_dev_ld3320?=?(struct?rt_spi_device?*)rt_device_find(name);
????if?(!spi_dev_ld3320)
????{
????????rt_kprintf("spi?sample?run?failed!?can't?find?%s?device!\n",?name);
????}
????else
????{
????????rt_kprintf("spi?sample?run?success!find?%s?device!\n",?name);
????}
�Զ��崫������
struct rt_spi_message *rt_spi_transfer_message(struct rt_spi_device ?*device,struct rt_spi_message *message);

�˺������Դ���һ������Ϣ,�û������Զ���ÿ��������� message �ṹ�����������ֵ,�Ӷ����Ժܷ���Ŀ������ݴ��䷽ʽ��struct rt_spi_message ԭ������:
struct?rt_spi_message
{
????const?void?*send_buf;???????????/*?���ͻ�����ָ��?*/
????void?*recv_buf;?????????????????/*?���ջ�����ָ��?*/
????rt_size_t?length;???????????????/*?����?/?����?�����ֽ���?*/
????struct?rt_spi_message?*next;????/*?ָ��������͵���һ����Ϣ��ָ��?*/
????unsigned?cs_take????:?1;????????/*?Ƭѡѡ��?*/
????unsigned?cs_release?:?1;????????/*?�ͷ�Ƭѡ?*/
};
sendbuf Ϊ���ͻ�����ָ��,��ֵΪ RT_NULL ʱ,��ʾ���δ���Ϊֻ����״̬,����Ҫ�������ݡ�
recvbuf Ϊ���ջ�����ָ��,��ֵΪ RT_NULL ʱ,��ʾ���δ���Ϊֻ����״̬,����Ҫ������յ�������,�����յ�������ֱ�Ӷ�����
length �ĵ�λΪ word,�����ݳ���Ϊ 8 λʱ,ÿ�� length ռ�� 1 ���ֽ�;�����ݳ���Ϊ 16 λʱ,ÿ�� length ռ�� 2 ���ֽڡ�
���� next ��ָ��������͵���һ����Ϣ��ָ��,��ֻ����һ����Ϣ,���ָ��ֵΪ RT_NULL��������������Ϣͨ�� next ָ���Ե�����������ʽ������һ��
cs_take ֵΪ 1 ʱ,��ʾ�ڴ�������ǰ,���ö�Ӧ�� CS Ϊ��Ч״̬��cs_release ֵΪ 1 ʱ,��ʾ�����ݴ��������,�ͷŶ�Ӧ�� CS��
ע:* �� send_buf �� recv_buf ��Ϊ��ʱ,���ߵĿ��ÿռ䶼����С�� length��* ��ʹ�ô˺���������Ϣ,����ĵ�һ����Ϣ cs_take ����Ϊ 1,����ƬѡΪ��Ч,���һ����Ϣ�� cs_release ���� 1,�ͷ�Ƭѡ��
�������ʹ��,�ں�����ϸ����
SPI��ԭ���Լ�һЩ�����ĺ������������ܾ�������,С�����Ҳ����ȥrt-thread�����鿴
LD3320���
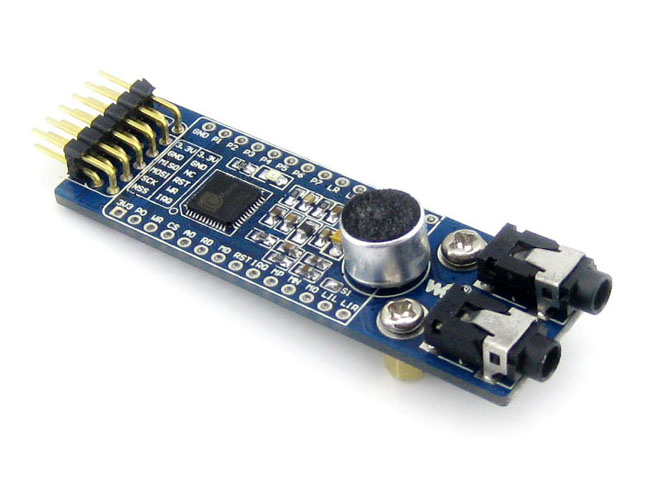
ij�����,�۸�ͦ��,����Ҳͦ��,�������š�¼����������ʶ��ȵ�,����LD3320�����Ͻ���ʵ����̫����,������Ҫ���ܼ���:
оƬ����
��Ҫ��ɫ����
��Ҫ��������
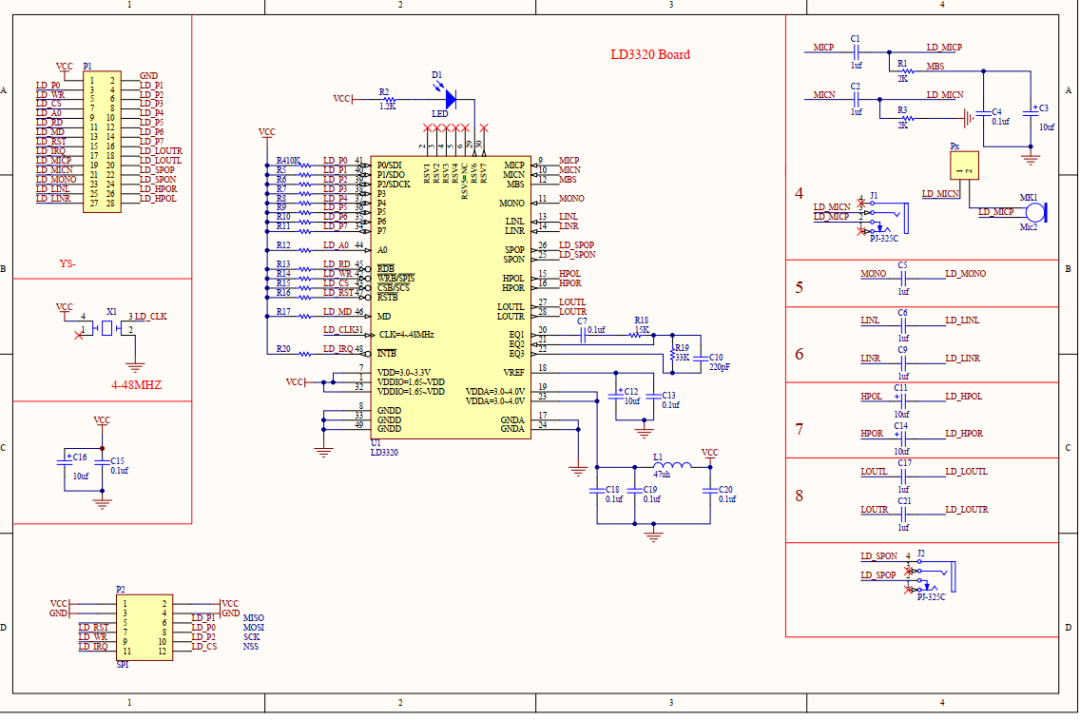
ģ��ԭ��ͼ
��������ʱ��
����SPIЭ��,��һ�¼���...
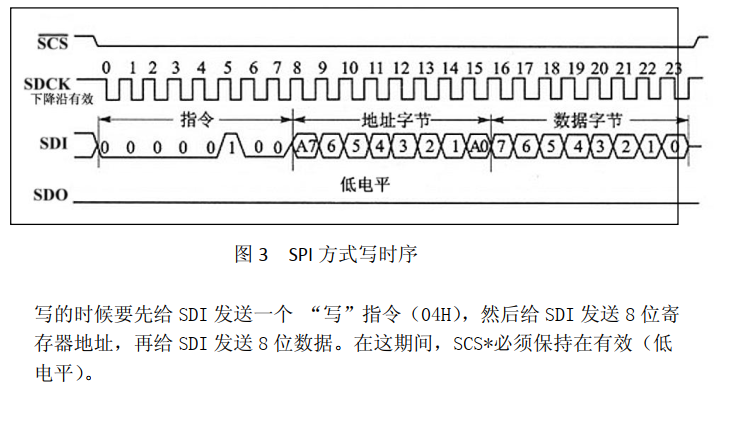
дʱ��:
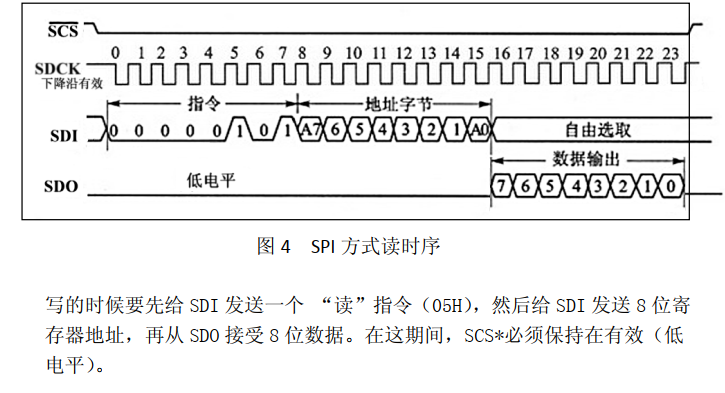
��ʱ��:
�����д
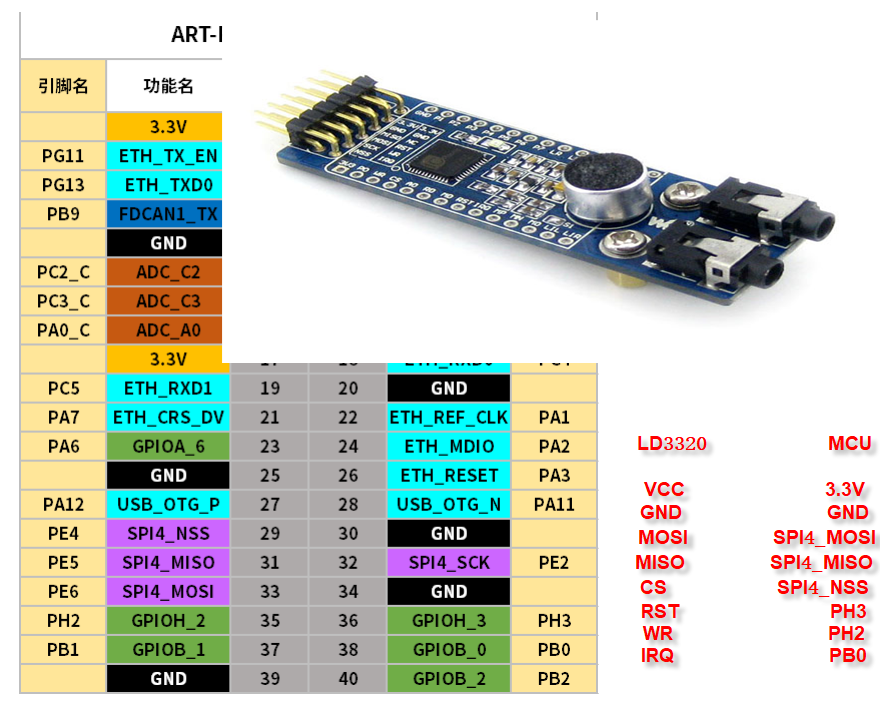
Ӳ������:
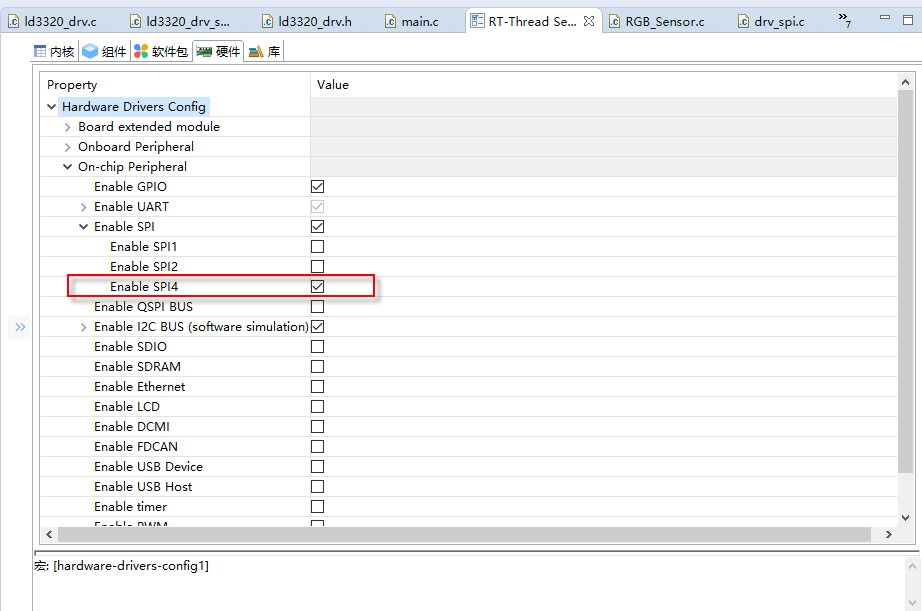
rt studio����:
������WR��RST��IRQ���Ž��ж���
#define?LD3320_WR?GET_PIN(H,?2)
#define?LD3320_RST?GET_PIN(H,?3)
#define?LD3320_IRQ?GET_PIN(B,?0)
#define?LD3320_CS?GET_PIN(E,?4)
#define?LD3320_WR_Func(x)?x???rt_pin_write(LD3320_WR,?PIN_HIGH)?:?rt_pin_write(LD3320_WR,?PIN_LOW)
#define?LD3320_RST_Func(x)?x???rt_pin_write(LD3320_RST,?PIN_HIGH)?:?rt_pin_write(LD3320_RST,?PIN_LOW)
#define?LD3320_CS_Func(x)?x???rt_pin_write(LD3320_CS,?PIN_HIGH)?:?rt_pin_write(LD3320_CS,?PIN_LOW)
IRQ��Ҫע���ж�:
void?rt_ld3320_irq_pin_init()
{
????rt_pin_mode(LD3320_IRQ,?PIN_MODE_INPUT_PULLUP);
????rt_pin_attach_irq(LD3320_IRQ,?PIN_IRQ_MODE_FALLING,?rt_ld3320_isr,?RT_NULL);
????rt_pin_irq_enable(LD3320_IRQ,?PIN_IRQ_ENABLE);
}
SPI�豸ע���ʼ��:
void?rt_ld3320_init(int?argc,?char?*argv[])
{
????char?name[RT_NAME_MAX];
????if?(argc?==?2)
????{
????????rt_strncpy(name,?argv[1],?RT_NAME_MAX);
????}
????else
????{
????????rt_strncpy(name,?LD3320_SPI_DEVICE_NAME,?RT_NAME_MAX);
????}
????rt_hw_ld3320_init();
????spi_dev_ld3320?=?(struct?rt_spi_device?*)rt_device_find(name);
????if?(!spi_dev_ld3320)
????{
????????rt_kprintf("spi?sample?run?failed!?can't?find?%s?device!\n",?name);
????}
????else
????{
????????rt_kprintf("spi?sample?run?success!find?%s?device!\n",?name);
????}
????struct?rt_spi_configuration?cfg;
????cfg.data_width?=?8;
????cfg.mode?=?RT_SPI_MSB?|?RT_SPI_MASTER?|?RT_SPI_MODE_2;
????cfg.max_hz?=?6?*?1000?*?100;?/*?6M?*/
????if?(rt_spi_configure(spi_dev_ld3320,?&cfg)?==?RT_ERROR)
????{
????????rt_kprintf("spi4?config?error\r\n");
????}
????rt_kprintf("spi4?config?success\r\n");
????rt_LD_init();
}
�Ϲ�ء���������Ļ�,SPI��ʼ��OK��,����:
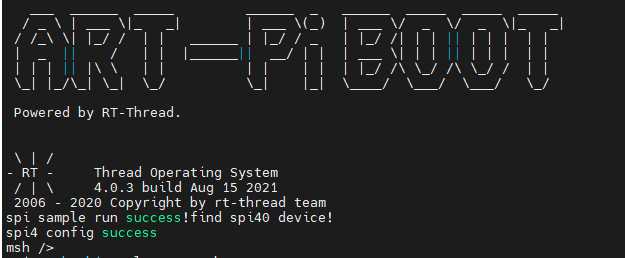
��������д��д�Ĵ����Ļ�������:
д�Ĵ���:���������Զ������ݴ��亯���Ľ���,ʹ���Զ�������ʵ��SPI���ݴ���
/********************************************************************************
function:
????????????????Write?data?to?LD3320?reg
********************************************************************************/
static?void?rt_LD_WriteReg(rt_uint8_t?data1,?rt_uint8_t?data2)
{
????rt_uint8_t?buf[3];
????struct?rt_spi_message?msg;
????LD3320_WR_Func(0);
????buf[0]?=?0x04;
????buf[1]?=?data1;
????buf[2]?=?data2;
????msg.send_buf?=?buf;
????msg.recv_buf?=?RT_NULL;
????msg.length?=?3;
????msg.cs_take?=?1;
????msg.cs_release?=?1;
????msg.next?=?RT_NULL;
????rt_spi_transfer_message(spi_dev_ld3320,?&msg);
}
��ȡ�Ĵ���:
/********************************************************************************
function:
????????????????Read?data?from?LD3320?reg
********************************************************************************/
static?rt_uint8_t?rt_LD_ReadReg(rt_uint8_t?reg_addr)
{
????rt_uint8_t?ret_byte;
????LD3320_WR_Func(0);
????struct?rt_spi_message?msg1,?msg2;
????rt_uint8_t?buf[3];
????buf[0]?=?0x05;
????buf[1]?=?reg_addr;
????buf[2]?=?0x00;
????msg1.send_buf?=?buf;
????msg1.recv_buf?=?RT_NULL;
????msg1.length?=?2;
????msg1.cs_take?=?1;
????msg1.cs_release?=?0;
????msg1.next?=?&msg2;
????msg2.send_buf?=?RT_NULL;
????msg2.recv_buf?=?&ret_byte;
????msg2.length?=?1;
????msg2.cs_take?=?0;
????msg2.cs_release?=?1;
????msg2.next?=?RT_NULL;
????rt_spi_transfer_message(spi_dev_ld3320,?&msg1);
????return?(ret_byte);
}
������������,¼�����ı����Ȳ�������,�ص㿴������ʶ�����ʵ��:
ģ���ڿ�ʼ����֮ǰ,Ҫ�ȶ�����и�λ����,���Ƕ�оƬ�ĵ� 47 ��( RSTB*)���͵͵�ƽ,Ȼ����Ҫ��Ƭѡ CS ��һ�� ���͡����ߵIJ���,�Լ����ڲ� DSP���ɰ�������˳��:
/********************************************************************************
function:
????????????????LD3320?hardware?init
********************************************************************************/
void?rt_LD_init(void)
{
????LD3320_RST_Func(1);
????rt_thread_delay(100);
????LD3320_RST_Func(0);
????rt_thread_delay(100);
????LD3320_RST_Func(1);
????rt_thread_delay(100);
????LD3320_CS_Func(0);
????rt_thread_delay(100);
????LD3320_CS_Func(1);
????rt_thread_delay(100);
}
����ʶ��IJ���˳����:
����ʶ���ó�ʼ��(����ͨ�ó�ʼ��)��д��ʶ���б�����ʼʶ��, �������ж���Ӧ����,���ж�����λ��
������Ҫ˵��һ��,��������жϷ�ʽ,Ҳ����ͨ����ѯ��ʽ�������ڡ��� ʼʶ�𡱺�,��ȡ�Ĵ��� B2H ��ֵ,���Ϊ 21H �ͱ�ʾ��ʶ����������
�ڴ�֮���ȡ��ѡ��Ȳ������жϷ�ʽ��ͬ��
-
ͨ�ó�ʼ��
/********************************************************************************
function:
????????????????Common?init
********************************************************************************/
static?void?rt_LD_Init_Common(void)
{
????bMp3Play?=?0;
????rt_LD_ReadReg(0x06);
????rt_LD_WriteReg(0x17,?0x35);
????rt_thread_delay(20);
????rt_LD_ReadReg(0x06);
????rt_LD_WriteReg(0x89,?0x03);
????rt_thread_delay(20);
????rt_LD_WriteReg(0xCF,?0x43);
????rt_thread_delay(20);
????rt_LD_WriteReg(0xCB,?0x02);
????/*PLL?setting*/
????rt_LD_WriteReg(0x11,?LD_PLL_11);
????if?(nLD_Mode?==?LD_MODE_MP3)
????{
????????rt_LD_WriteReg(0x1E,?0x00);
????????rt_LD_WriteReg(0x19,?LD_PLL_MP3_19);
????????rt_LD_WriteReg(0x1B,?LD_PLL_MP3_1B);
????????rt_LD_WriteReg(0x1D,?LD_PLL_MP3_1D);
????}
????else
????{
????????rt_LD_WriteReg(0x1E,?0x00);
????????rt_LD_WriteReg(0x19,?LD_PLL_ASR_19);
????????rt_LD_WriteReg(0x1B,?LD_PLL_ASR_1B);
????????rt_LD_WriteReg(0x1D,?LD_PLL_ASR_1D);
????}
????rt_thread_delay(20);
????rt_LD_WriteReg(0xCD,?0x04);
????rt_LD_WriteReg(0x17,?0x4c);
????rt_thread_delay(20);
????rt_LD_WriteReg(0xB9,?0x00);
????rt_LD_WriteReg(0xCF,?0x4F);
????rt_LD_WriteReg(0x6F,?0xFF);
}
-
����ʶ���ʼ��
/********************************************************************************
function:
????????????????ASR?init
********************************************************************************/
static?void?rt_LD_Init_ASR(void)
{
????nLD_Mode?=?LD_MODE_ASR_RUN;
????rt_LD_Init_Common();
????rt_LD_WriteReg(0xBD,?0x00);
????rt_LD_WriteReg(0x17,?0x48);
????rt_thread_delay(20);
????rt_LD_WriteReg(0x3C,?0x80);
????rt_LD_WriteReg(0x3E,?0x07);
????rt_LD_WriteReg(0x38,?0xff);
????rt_LD_WriteReg(0x3A,?0x07);
????rt_thread_delay(20);
????rt_LD_WriteReg(0x40,?0);
????rt_LD_WriteReg(0x42,?8);
????rt_LD_WriteReg(0x44,?0);
????rt_LD_WriteReg(0x46,?8);
????rt_thread_delay(20);
}
-
д��ʶ���
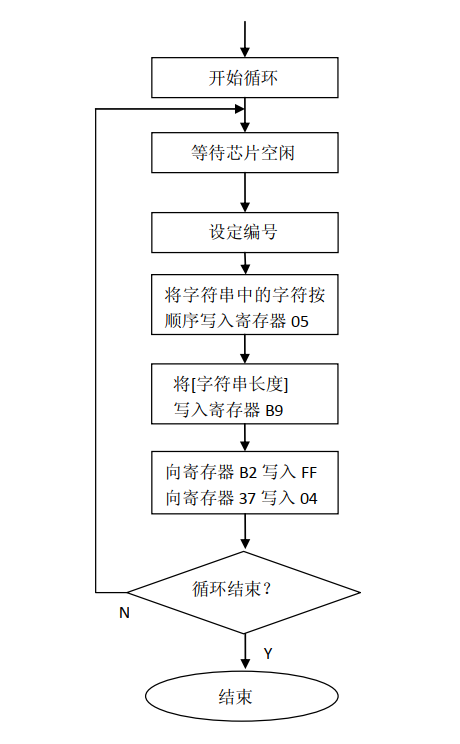
�Ƚ���һ����ȡ 0xB2 �Ĵ����ĺ���,������Ժ�� ASR �����ǰ���ܹ� ��ȡ����ȷ Idle ״̬,˵��оƬ�ڲ����ܳ����ˡ�����������,��ʹ�õĵ� Դ��ѹ/�������ֲ��ȶ��нϴ�ʱ,��С���ʻ��������������������� ���ʱ,���� Reset LD3320 оƬ,������������оƬ��
/********************************************************************************
function:
????????????????Check?ASR?state
********************************************************************************/
static?rt_uint8_t?rt_LD_Check_ASRBusyFlag(void)
{
????rt_uint8_t?j;
????rt_uint8_t?flag?=?0;
????for?(j?=?0;?j?<?10;?j++)
????{
????????if?(rt_LD_ReadReg(0xb2)?==?0x21)
????????{
????????????flag?=?1;
????????????//rt_kprintf("success!!!?ASR?OK\r\n");
????????????break;
????????}
????????rt_thread_delay(10);
????????//printf("ERROR!!!?ASR?Busy\r\n");
????}
????return?flag;
}
/********************************************************************************
function:
????????????????Add?ASR?Keyword
********************************************************************************/
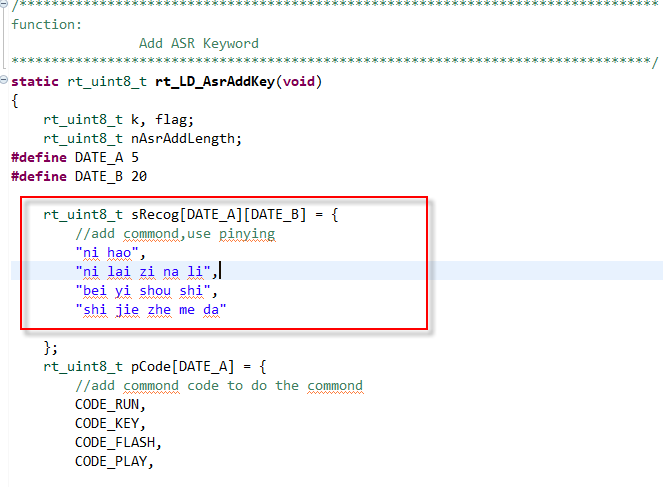
static?rt_uint8_t?rt_LD_AsrAddKey(void)
{
????rt_uint8_t?k,?flag;
????rt_uint8_t?nAsrAddLength;
#define?DATE_A?5
#define?DATE_B?20
????rt_uint8_t?sRecog[DATE_A][DATE_B]?=?{
????????//add?commond,use?pinying
????????"qian?jin",
????????"hou?tui",
????????"zuo?zhuan",
????????"you?zhuan"
????};
????rt_uint8_t?pCode[DATE_A]?=?{
????????//add?commond?code?to?do?the?commond
????????CODE_RUN,
????????CODE_KEY,
????????CODE_FLASH,
????????CODE_PLAY,
????};
????flag?=?1;
????for?(k?=?0;?k?<?DATE_A;?k++)
????{?//write?data?to?LD3320
????????if?(rt_LD_Check_ASRBusyFlag()?==?0)
????????{
????????????flag?=?0;
????????????break;
????????}
????????rt_LD_WriteReg(0xc1,?pCode[k]);
????????rt_LD_WriteReg(0xc3,?0);
????????rt_LD_WriteReg(0x08,?0x04);
????????rt_thread_delay(1);
????????rt_LD_WriteReg(0x08,?0x00);
????????rt_thread_delay(1);
????????for?(nAsrAddLength?=?0;?nAsrAddLength?<?DATE_B;?nAsrAddLength++)
????????{
????????????if?(sRecog[k][nAsrAddLength]?==?0)
????????????????break;
????????????rt_LD_WriteReg(0x5,?sRecog[k][nAsrAddLength]);
????????}
????????rt_LD_WriteReg(0xb9,?nAsrAddLength);
????????rt_LD_WriteReg(0xb2,?0xff);
????????rt_LD_WriteReg(0x37,?0x04);
????}
????return?flag;
}
-
��ʼʶ��
/********************************************************************************
function:
????????????????Begin?to?ASR
********************************************************************************/
static?rt_uint8_t?rt_LD_AsrRun(void)
{
????rt_LD_WriteReg(0x35,?MIC_VOL);
????rt_LD_WriteReg(0x1C,?0x09);
????rt_LD_WriteReg(0xBD,?0x20);
????rt_LD_WriteReg(0x08,?0x01);
????rt_thread_delay(20);
????rt_LD_WriteReg(0x08,?0x00);
????rt_thread_delay(20);
????if?(rt_LD_Check_ASRBusyFlag()?==?0)
????????return?0;
????rt_LD_WriteReg(0xB2,?0xff);
????rt_LD_WriteReg(0x37,?0x06);
????rt_LD_WriteReg(0x37,?0x06);
????rt_thread_delay(20);
????rt_LD_WriteReg(0x1C,?0x0b);
????rt_LD_WriteReg(0x29,?0x10);
????rt_LD_WriteReg(0xBD,?0x00);
????return?1;
}
/********************************************************************************
function:
????????????????Run?ASR
********************************************************************************/
rt_uint8_t?rt_LD_ASR(void)
{
????rt_uint8_t?i?=?0;
????rt_uint8_t?asrflag?=?0;
????for?(i?=?0;?i?<?5;?i++)
????{?????????????????????//run?ASR?try?5?times
????????rt_LD_Init_ASR();?//init?ASR
????????rt_thread_delay(100);
????????if?(rt_LD_AsrAddKey()?==?0)
????????{?//Add?fixed?to?LD3320
????????????rt_kprintf("ERROR!!!?LD_AsrAddKey\r\n");
????????????rt_LD_init();?//ERROR,Reset?LD3320
????????????rt_thread_delay(50);
????????????continue;
????????}
????????rt_thread_delay(10);
????????if?(rt_LD_AsrRun()?==?0)
????????{?//start?ASR
????????????rt_kprintf("ERROR!!!?LD_AsrRun\r\n");
????????????rt_LD_init();?//ERROR,Reset?LD3320
????????????rt_thread_delay(50);
????????????continue;
????????}
????????asrflag?=?1;
????????break;
????}
????//rt_kprintf("RunASR\r\n");
????return?asrflag;
}
-
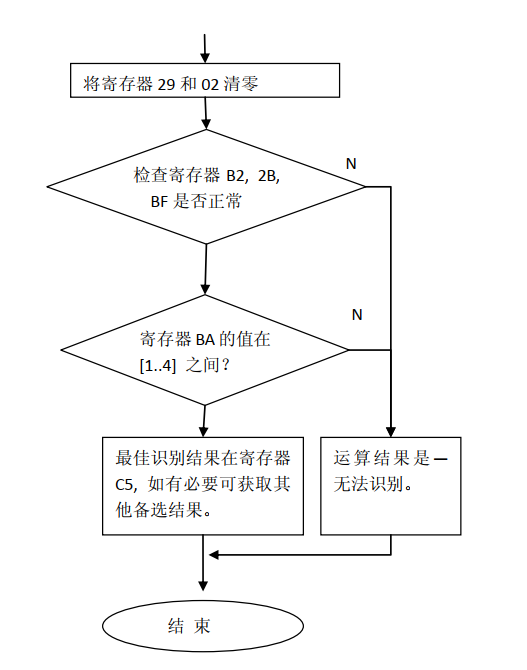
��Ӧ�ж� �����˷�ɼ�������,�����Ƿ�ʶ����������,�������һ�� �ж��źš����жϳ���Ҫ���ݼĴ�����ֵ�����������ȡ BA �Ĵ�����ֵ,����֪���м�����ѡ��,�� C5 �Ĵ������ ���ǵ÷���ߡ��������ȷ�Ĵ𰸡����緢��Ϊ���Ϻ��������ɹ�ʶ��(��������ѡ),��ô BA �Ĵ��� �����ֵ�� 1,�� C5 �Ĵ������ֵ�Ƕ�Ӧ�ı��� 3��
�жϵ���������һ��־����,��������������main��ִ��
-
����ʶ������ִ�ж�Ӧ�û�����
void?rt_ProcessInt()
{
????rt_uint8_t?nAsrResCount?=?0;
????ucRegVal?=?rt_LD_ReadReg(0x2B);
????ucHighInt?=?rt_LD_ReadReg(0x29);?//?interrupt?enable?flag
????ucLowInt?=?rt_LD_ReadReg(0x02);?//?interrupt?enable?flag
????rt_LD_WriteReg(0x29,?0);//?interrupt?disenable
????rt_LD_WriteReg(0x02,?0);//?interrupt?disenable
????if(nLD_Mode?==?LD_MODE_ASR_RUN)?{
????????//rt_kprintf("---------------ASR---------------\r\n");
????????//The?interruption?caused?by?speech?recognition
????????//(There?is?sound?input,?and?there?is?interruption?whether?the?recognition?is?successful?or?failed)
????????if((ucRegVal?&?0x10)?&&?rt_LD_ReadReg(0xb2)==0x21?&&?rt_LD_ReadReg(0xbf)==0x35)?{
????????????nAsrResCount?=?rt_LD_ReadReg(0xba);
????????????if(nAsrResCount>0?&&?nAsrResCount<=4)?{
????????????????rt_kprintf("ASR?SUCCESSFUL?\r\n");
????????????????nAsrStatus?=?LD_ASR_FOUNDOK;
????????????}
????????????else?{
????????????????rt_kprintf("ASR?UNSUCCESSFUL?\r\n");
????????????????nAsrStatus?=?LD_ASR_FOUNDZERO;
????????????}
????????}
????????else?{
????????????//rt_kprintf("No?ASR?\r\n");
????????????nAsrStatus?=?LD_ASR_FOUNDZERO;
????????}
????????rt_LD_WriteReg(0x2b,?0);
????????rt_LD_WriteReg(0x1c,?0);
????????return;
????}
????rt_kprintf("--------------PLAY?MP3--------------\r\n");
????//?Play?MP3?to?produce?3?kinkd?of?intterupt
????//?A.?play?over
????//?B.?data?send?over
????//?C.?Data?will?be?used?up?and?sent
????if(rt_LD_ReadReg(0xBA)?&?CAUSE_MP3_SONG_END)?{
????????//?A.?play?over
????????rt_LD_WriteReg(0x2B,?0);
????????rt_LD_WriteReg(0xBA,?0);
????????rt_LD_WriteReg(0xBC,?0);
????????rt_LD_WriteReg(0x08,?1);
????????rt_LD_WriteReg(0x08,?0);
????????rt_LD_WriteReg(0x33,?0);
????????rt_kprintf("play?over?\r\n");
????????bMp3Play?=?0;???????????????????//?play?status
????????return;
????}
????if(nMp3Pos?>=?nMp3Size)?{
????????//?B.?data?send?over
????????rt_LD_WriteReg(0xBC,?0x01);//data?voer
????????rt_LD_WriteReg(0x29,?0x10);
????????return;
????}
????//?C.?Data?will?be?used?up?and?sent
????rt_LD_ReloadMp3Data();
????rt_LD_WriteReg(0x29,?ucHighInt);
????rt_LD_WriteReg(0x02,?ucLowInt);
}
����,����ʶ�����̾�������,��������ε���:
���������߳�,������δ���,����С�ɸ粽��,С�ɸ���ں����ʵս����ϸ����
int?ld3320_sample(void)
{
????static?rt_thread_t?tid1?=?RT_NULL,tid2?=?RT_NULL;
????rt_ld3320_irq_pin_init();
????/*?�����߳�??*/
????tid1=rt_thread_create(
???????????????????"thread1",
???????????????????thread1_entry,
???????????????????RT_NULL,
???????????????????THREAD_STACK_SIZE,
???????????????????THREAD_PRIORITY,?THREAD_TIMESLICE);
????/*?�������߳̿��ƿ�,��������߳�?*/
????if?(tid1?!=?RT_NULL)
????????rt_thread_startup(tid1);
????/*?�����߳�??*/
????tid2=rt_thread_create(
???????????????????"thread2",
???????????????????thread2_entry,
???????????????????RT_NULL,
???????????????????THREAD_STACK_SIZE,
???????????????????THREAD_PRIORITY,?THREAD_TIMESLICE);
????/*?�������߳̿��ƿ�,��������߳�?*/
????if?(tid2?!=?RT_NULL)
????????rt_thread_startup(tid2);
????return?0;
}
/*?������?msh?�������?*/
//MSH_CMD_EXPORT(ld3320_sample,?ld3320?sample);
INIT_COMPONENT_EXPORT(ld3320_sample);
������:
/*?�߳����?*/
static?void?thread1_entry(void*?parameter)
{
????int?i;
????while(1)
????{
/*??????rt_kprintf("success!!!?thread1_entry?OK\r\n");
????????rt_thread_delay(500);*/
????????if(ld3320_flag)
????????{
????????????ld3320_flag=0;
????????????rt_ProcessInt();
????????}
????????else?{
????????????ld3320_flag=0;
????????????i++;
????????????if(i%500==0){
????????????????rt_kprintf("\r\n\rvoice?checking,please?speak...\r\n");
????????????????i=0;
????????????}
????????????rt_thread_delay(1);
????????}
????}
}
/*?�߳����?*/
static?void?thread2_entry(void*?parameter)
{
???rt_uint8_t?nAsrRes?=?0;
??while?(1)
??{
??????if?(bMp3Play)
??????{
??????????rt_kprintf("*********playing*********\r\n");
??????????continue;
??????}
??????switch?(nAsrStatus)
??????{
??????case?LD_ASR_RUNING:
??????case?LD_ASR_ERROR:
??????????break;
??????case?LD_ASR_NONE:
??????????nAsrStatus?=?LD_ASR_RUNING;
??????????if?(rt_LD_ASR()?==?0)?//Start?the?ASR?process?once
??????????????nAsrStatus?=?LD_ASR_ERROR;
??????????break;
??????case?LD_ASR_FOUNDOK:
??????????nAsrRes?=?rt_LD_GetResult();?//once?ASR?process?end,?get?the?result
??????????switch?(nAsrRes)
??????????{?//show?the?commond
??????????case?CODE_RUN:
??????????????rt_kprintf("voice?control?system?is?runing.....\r\n");
??????????????break;
??????????case?CODE_KEY:
??????????????rt_kprintf("voice?control?system?is?runing.....\r\n");
??????????????break;
??????????case?CODE_FLASH:
??????????????rt_kprintf("voice?control?system?is?runing.....\r\n");
??????????????break;
??????????case?CODE_PLAY:
??????????????rt_kprintf("voice?control?system?is?runing.....\r\n");
??????????????break;
??????????default:
??????????????break;
??????????}
??????????nAsrStatus?=?LD_ASR_NONE;
??????????break;
??????case?LD_ASR_FOUNDZERO:
??????default:
??????????nAsrStatus?=?LD_ASR_NONE;
??????????break;
??????}
??????rt_Board_text(nAsrRes);?//do?the?commond
??????nAsrRes?=?0;
??}
/*??????rt_kprintf("success!!!?thread2_entry?OK\r\n");
????????rt_thread_delay(500);*/
}
����,���,ending
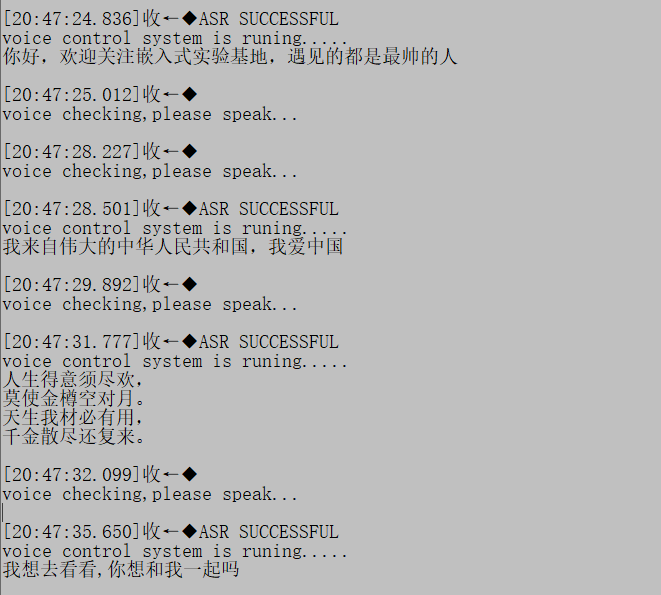
Ч����ʾ
��Ȼ�ܹ�����ʶ����,��,����һ������ԶԻ�,�ֱ����˵:���,����������,��һ��ʫ,������ô�� ʶ��֮��ֱ��Ӧ�����Ӧ������:
���ϻ�ȡ
��ע���ں�,��̨�ظ���LD3320�����ɻ�ȡԴ������,��ӭ����С�ɸ����,��Ⱥ����,��ӭ����Ķ�ԭ��

?

?