Q-Learing
Critic
相比于Policy,Critics的评价方法很不一样:他有一个状态评价函数
V
π
V^π
Vπ,输入是Environment的一个状态State,然后根据Actor也就是
π
π
π的情况,输出从当前这个状态开始到结束,一共能获得多少期望的Reward,记为
V
π
(
s
)
V^π(s)
Vπ(s)。
比如打砖块时,
V
π
V^π
Vπ会输出从现在到结束大概能得多少分。
比如下围棋,
V
π
V^π
Vπ会输出现在的局势下双方胜率是多少。

那么,如何做这个 V π V^π Vπ呢?一般有两种办法。
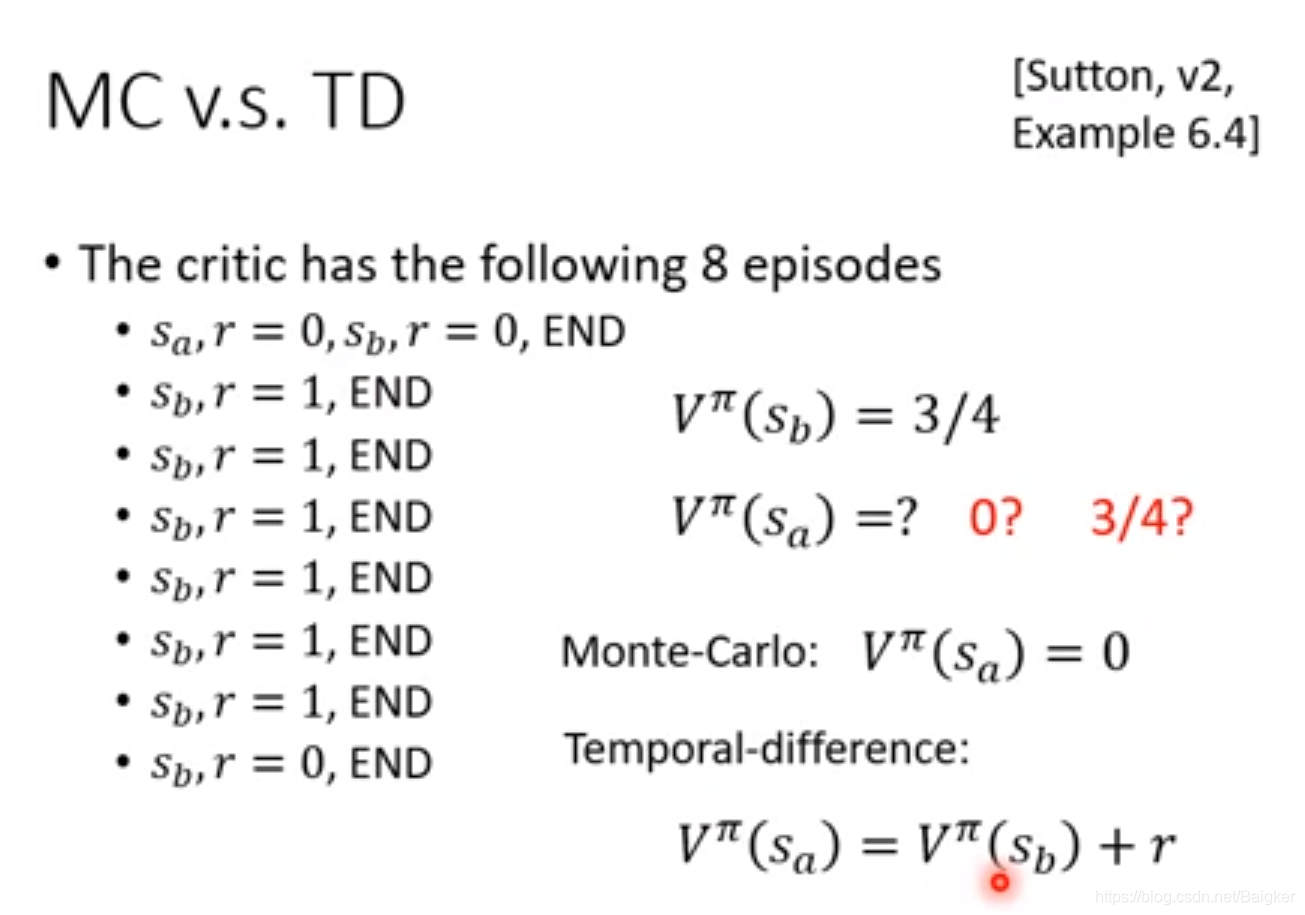
第一种,蒙特卡洛法。先观察
π
π
π玩很多次游戏。然后看到一个state后将结果尽量向某一局游戏结果贴合。

第二种,时序查分算法。我们只需要知道从状态
s
a
s_a
sa?到状态
s
b
s_b
sb?需要做Action
a
a
a,获得Reward
r
r
r。那我们就可以训练一个Network,让
V
π
(
s
b
)
?
V
π
(
s
a
)
V^π(s_b)-V^π(s_a)
Vπ(sb?)?Vπ(sa?)尽可能接近
r
r
r。

以实例来说明两者之间的差别。
目前多数使用TD,MC很少用了。
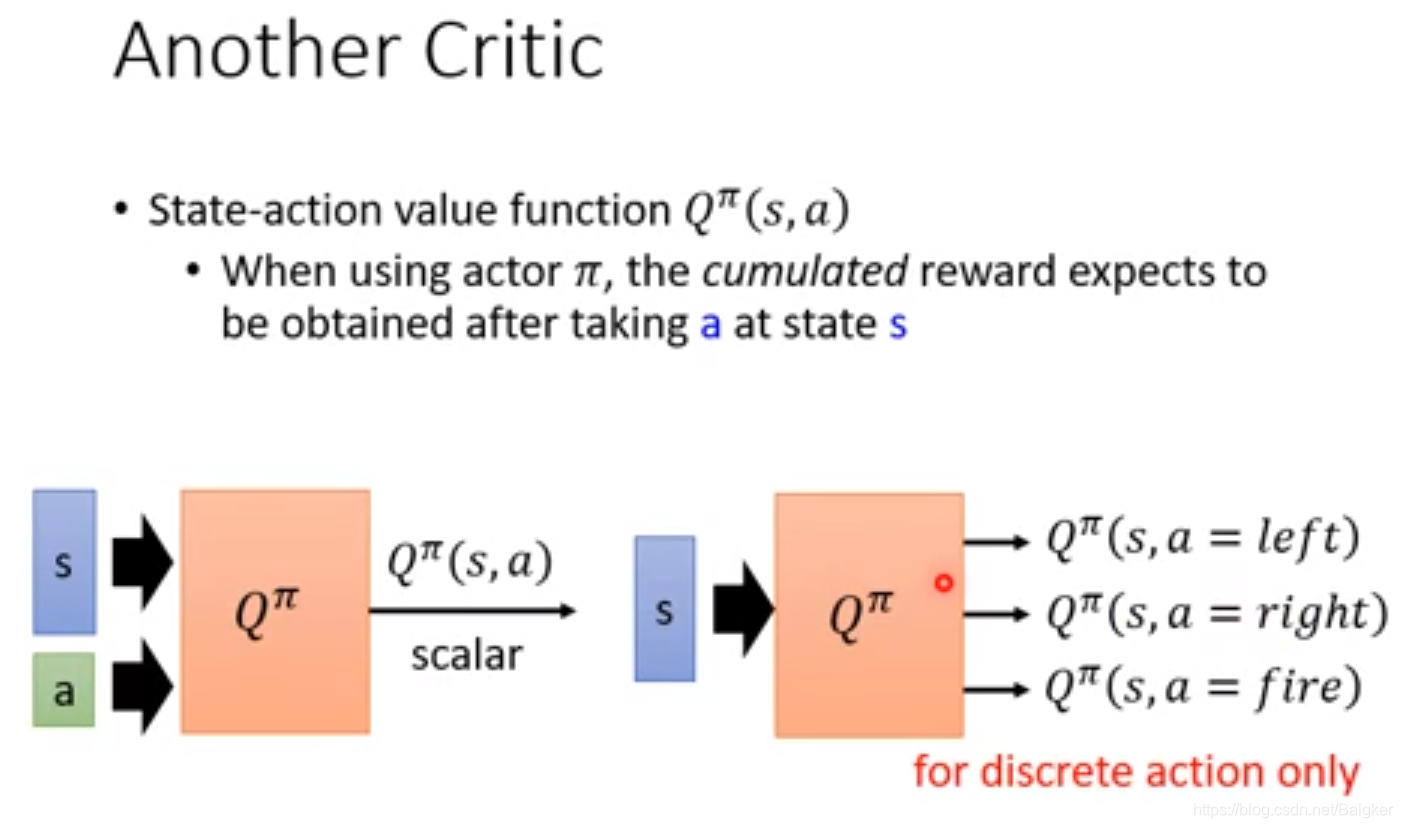
还有一种Critic的方法。用
Q
π
(
s
,
a
)
Q^π(s,a)
Qπ(s,a)在某个状态s采取了行动a之后会得到累计的Reward。
这就是Q-Learning。
Q-learning的思路就是通过与环境互动使用更好的
π
π
π。而且,只要求出
Q
π
(
s
,
a
)
Q^π(s,a)
Qπ(s,a)就一定能找到一个更好的Actor
π
π
π。
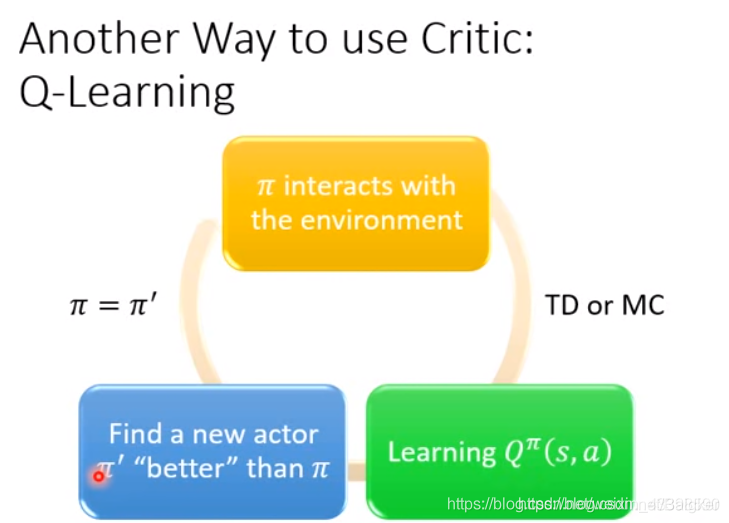
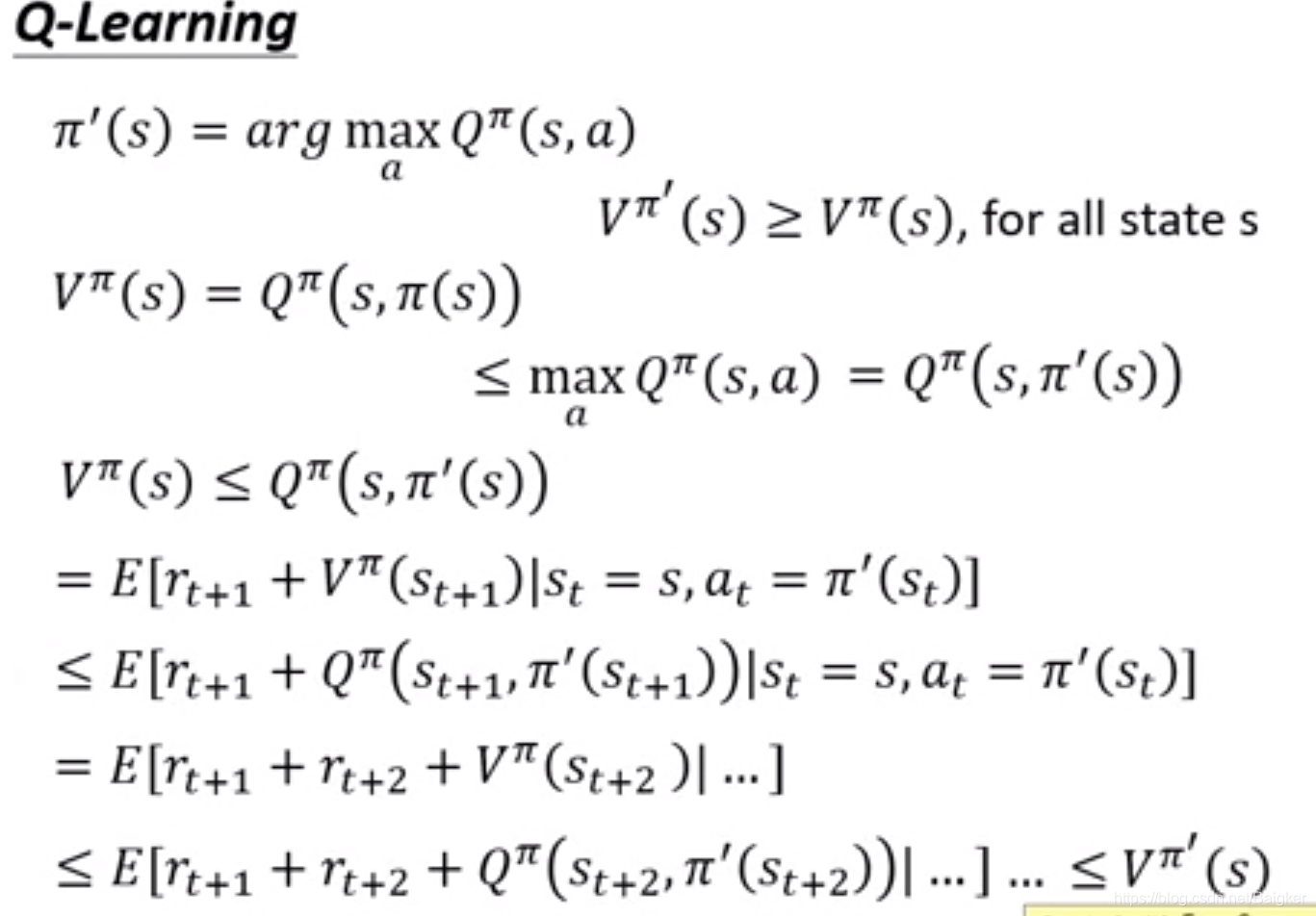
什么是更好的Actor呢?对于任意的状态s,都有:
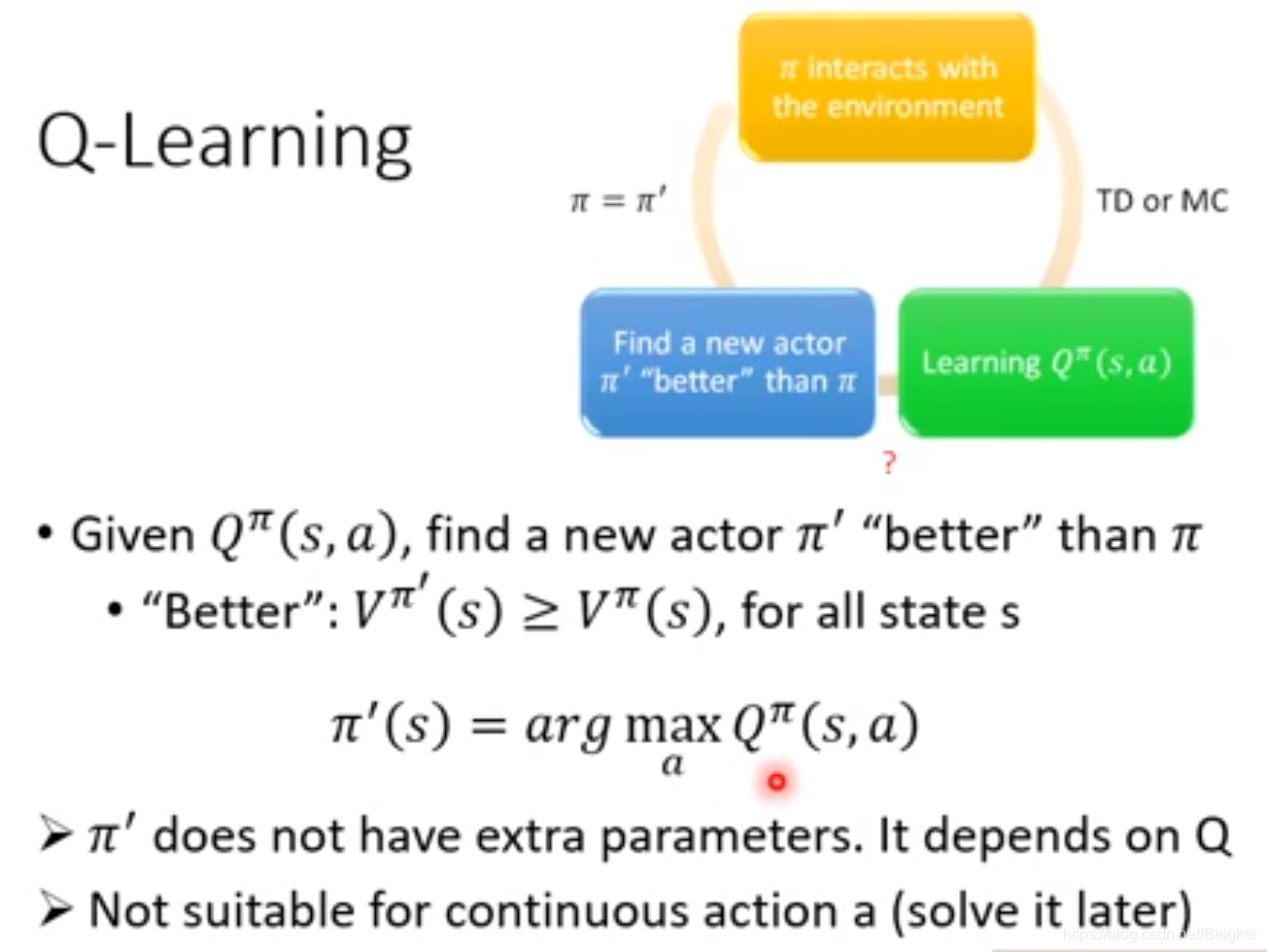
实际上,
π
′
π'
π′并没有额外的参数或者另一个神经网络去表示,它只是依靠
Q
Q
Q推导出来的。
注意: 如果动作是一个连续值的话则不适合使用这种方法。
Q-learning技巧
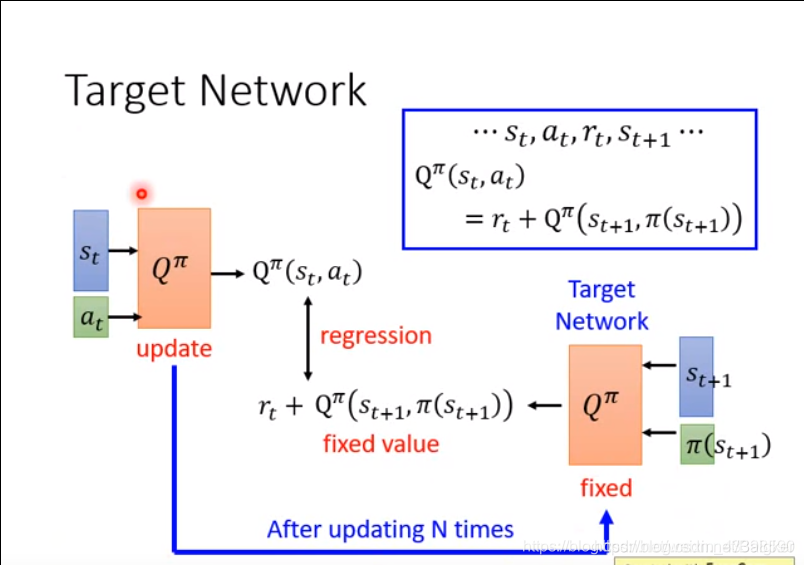
Target Network
我们使用Q-learning的时候,有一个部分
Q
π
(
s
t
,
a
t
)
=
r
t
+
Q
π
(
s
t
+
1
,
π
(
s
t
+
1
)
)
Q^π ( s_t , a_t ) = r_t + Q^π ( s_{t+1}, π ( s_{t + 1} ) )
Qπ(st?,at?)=rt?+Qπ(st+1?,π(st+1?))这和之前的TD方法是类似的(同样都有Rewarf值)。
因为我们训练的时候不希望改变我们的Target,因为我们要拟合一个不停变化的值是相当困难的。所以我们选择固定Target的值,不改变他的参数,在这种情况下进行训练。
具体过程如下:
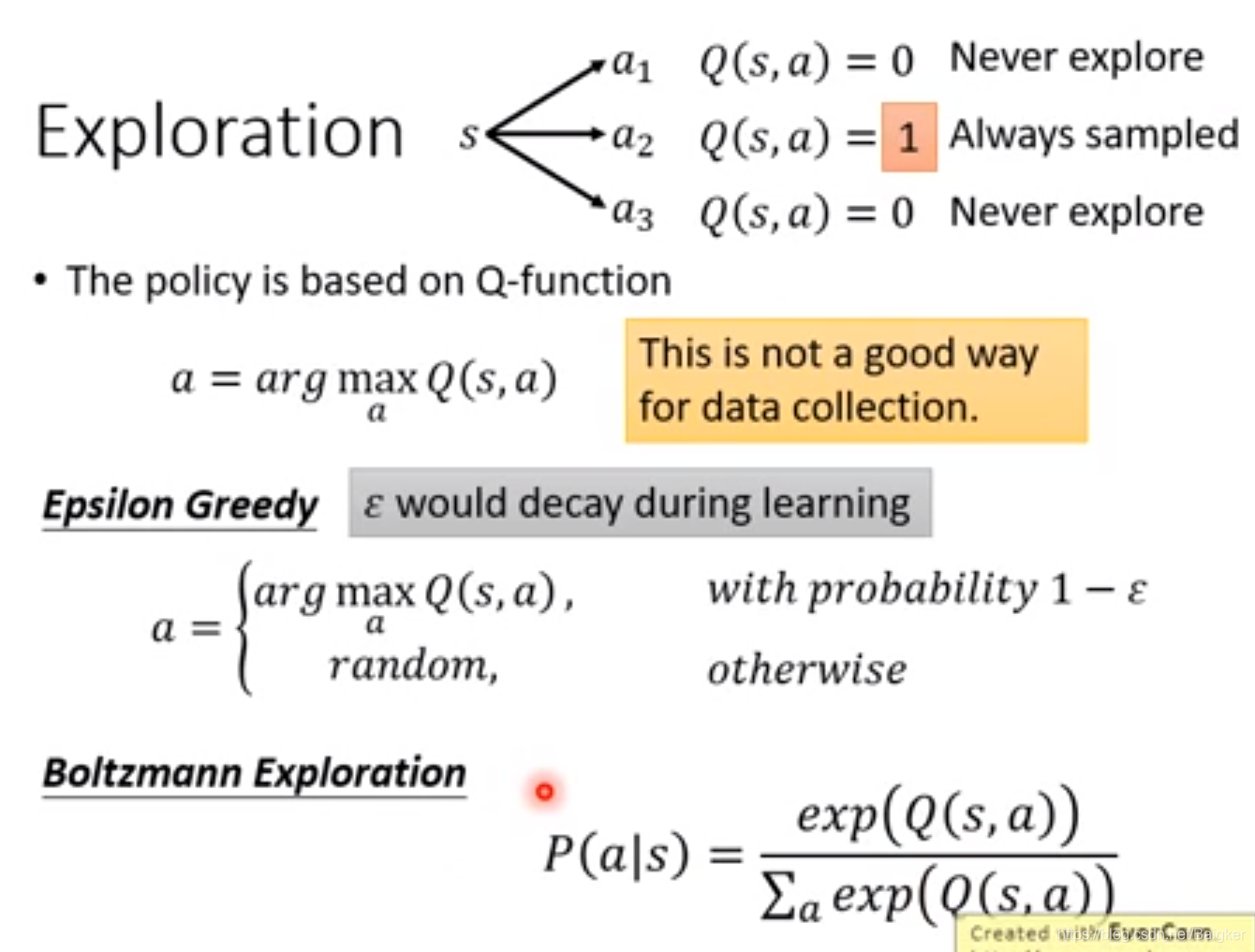
Exploration
没有探索到的位置的
Q
Q
Q值始终为0,因而一直不会被选中(如果使用的是神经网络这种现象较弱,但是依然存在)。
所以为了避免每次都做出同样的选择,我们可以采用以下的方法:
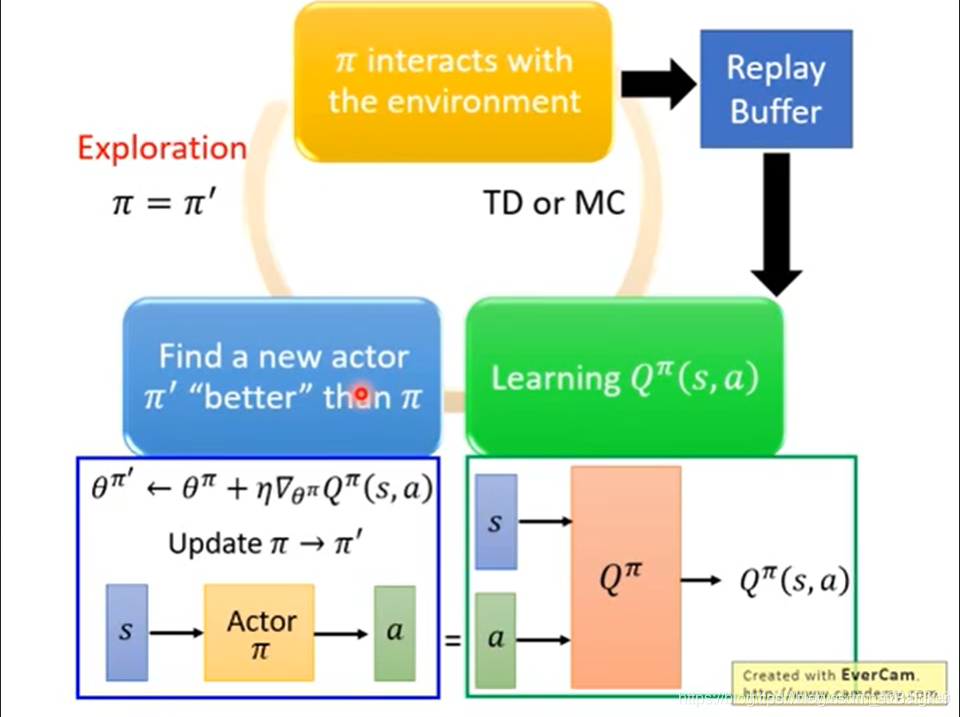
Replay Buffer
这个方法把最近的与环境交互结果数据(不一定是同一个π \piπ出来的数据)都放到缓存区里,利用这些数据进行训练。但是使用不同的π \piπ值会不会影响我们的训练呢?结论是不会的。
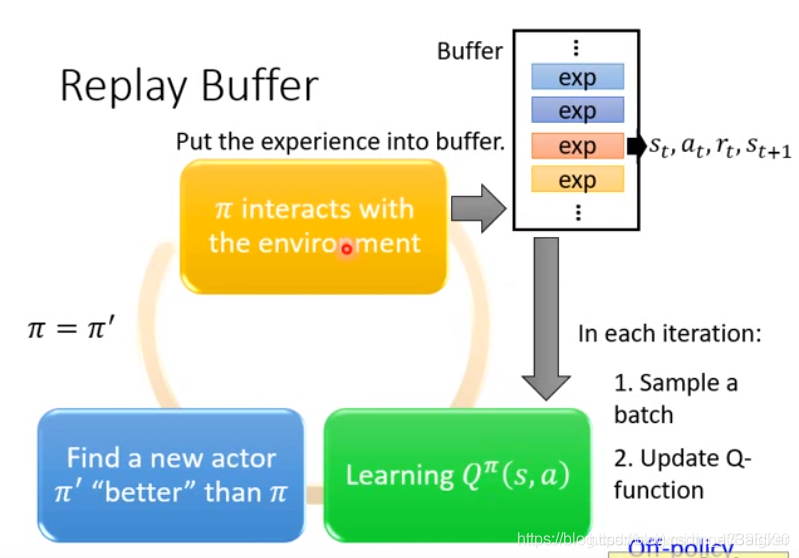
算法执行过程
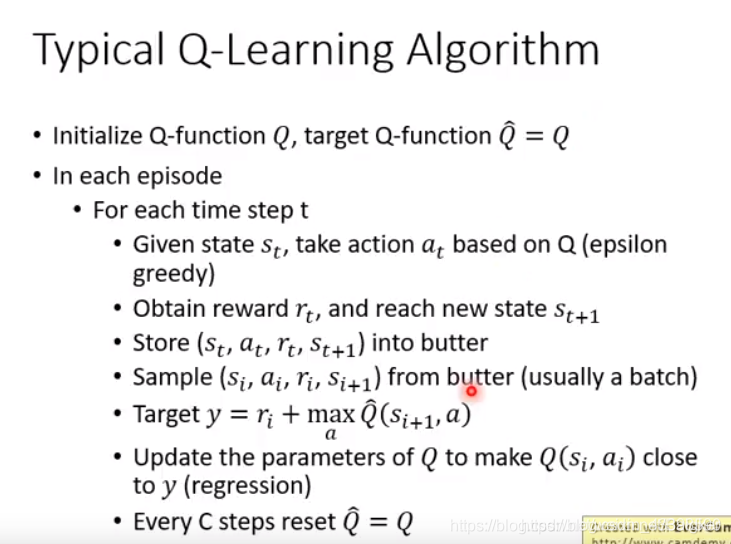
Q-Learning的Tips
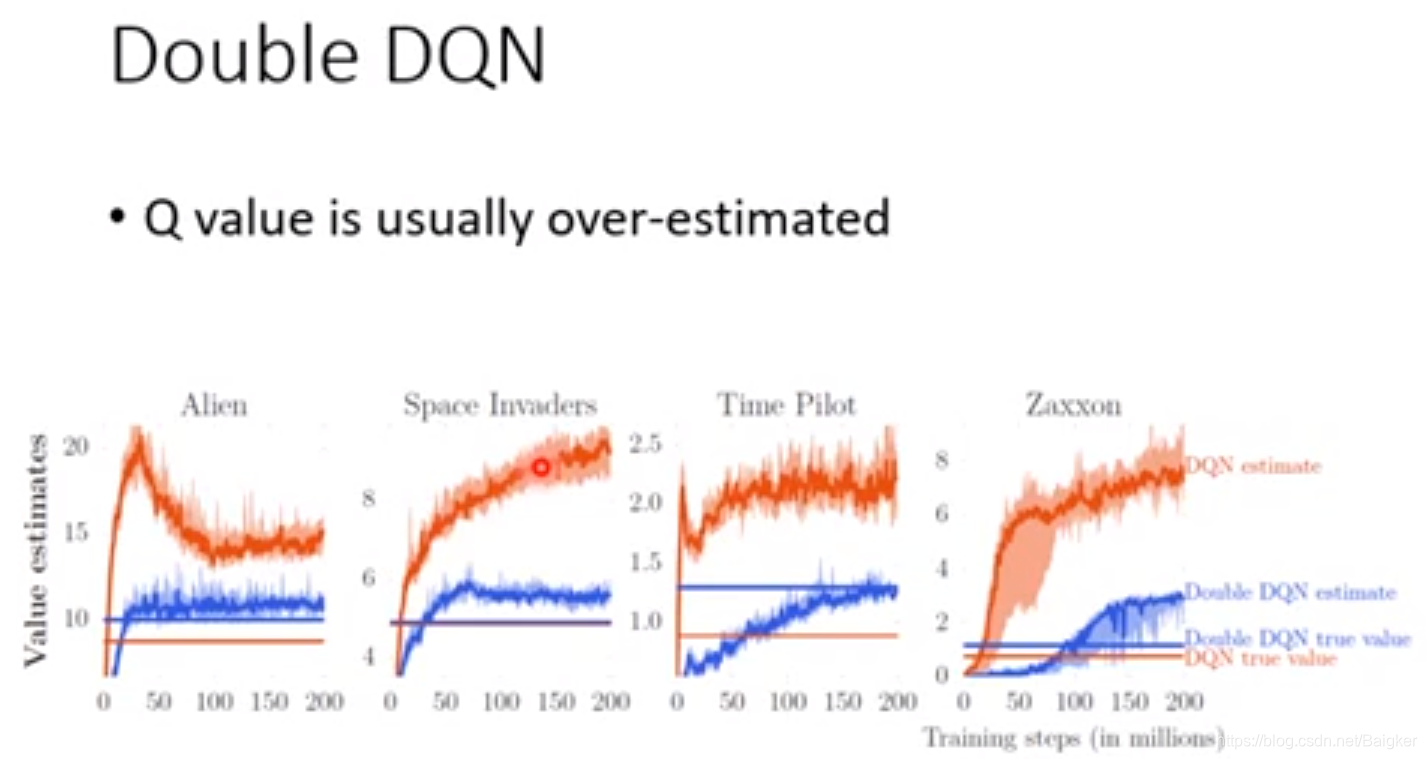
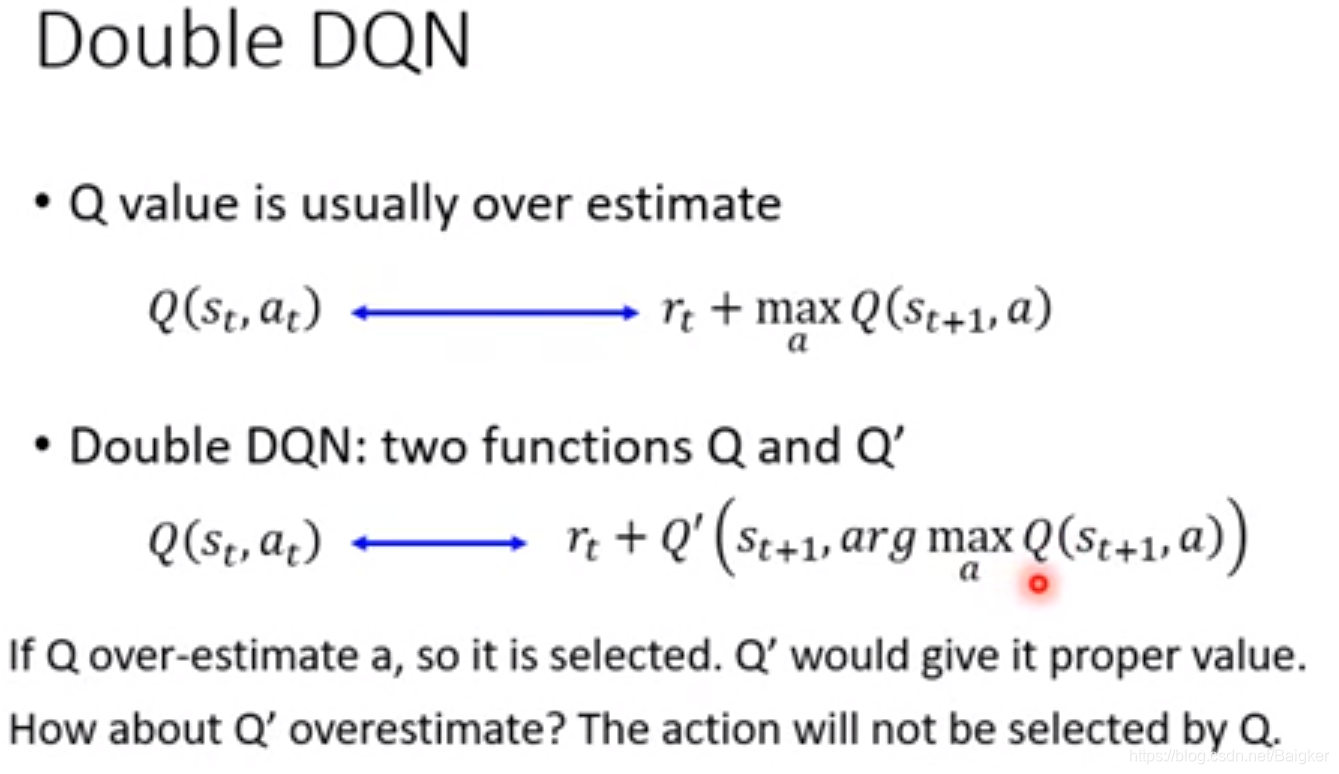
Double DQN
我们发现
Q
Q
Q总是被高估。(Alien图)
原因在于每次更新Actor时我们都会选择一Reward最大的Action,一旦某个Action被高估了,他就很有可能被选中,从而将这个偏差不断累积下去。
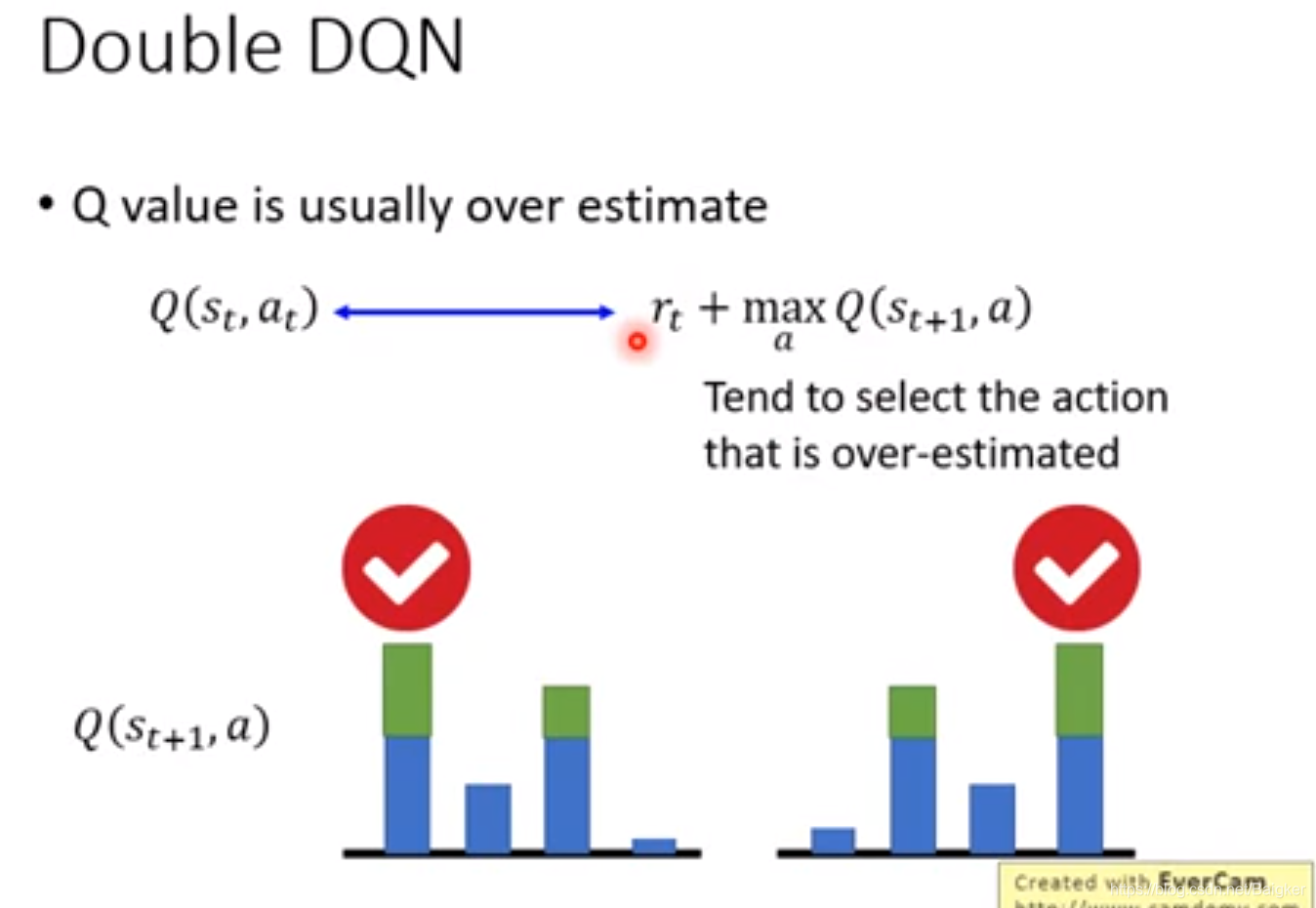
解决方法也很巧妙:用两个
Q
Q
Q函数,一个负责选Action,一个负责给Reward。这样只有两个函数同时出问题时,最后结果才会被高估。这样高估的概率大大减少了。
Dueling DQN
Dueling DQN不需要太了解,只需要知道他改了原来Network的架构:原来直接输出
Q
Q
Q,现在把
Q
Q
Q拆成
V
(
x
)
V(x)
V(x)与
A
(
s
,
a
)
A(s,a)
A(s,a)的和。
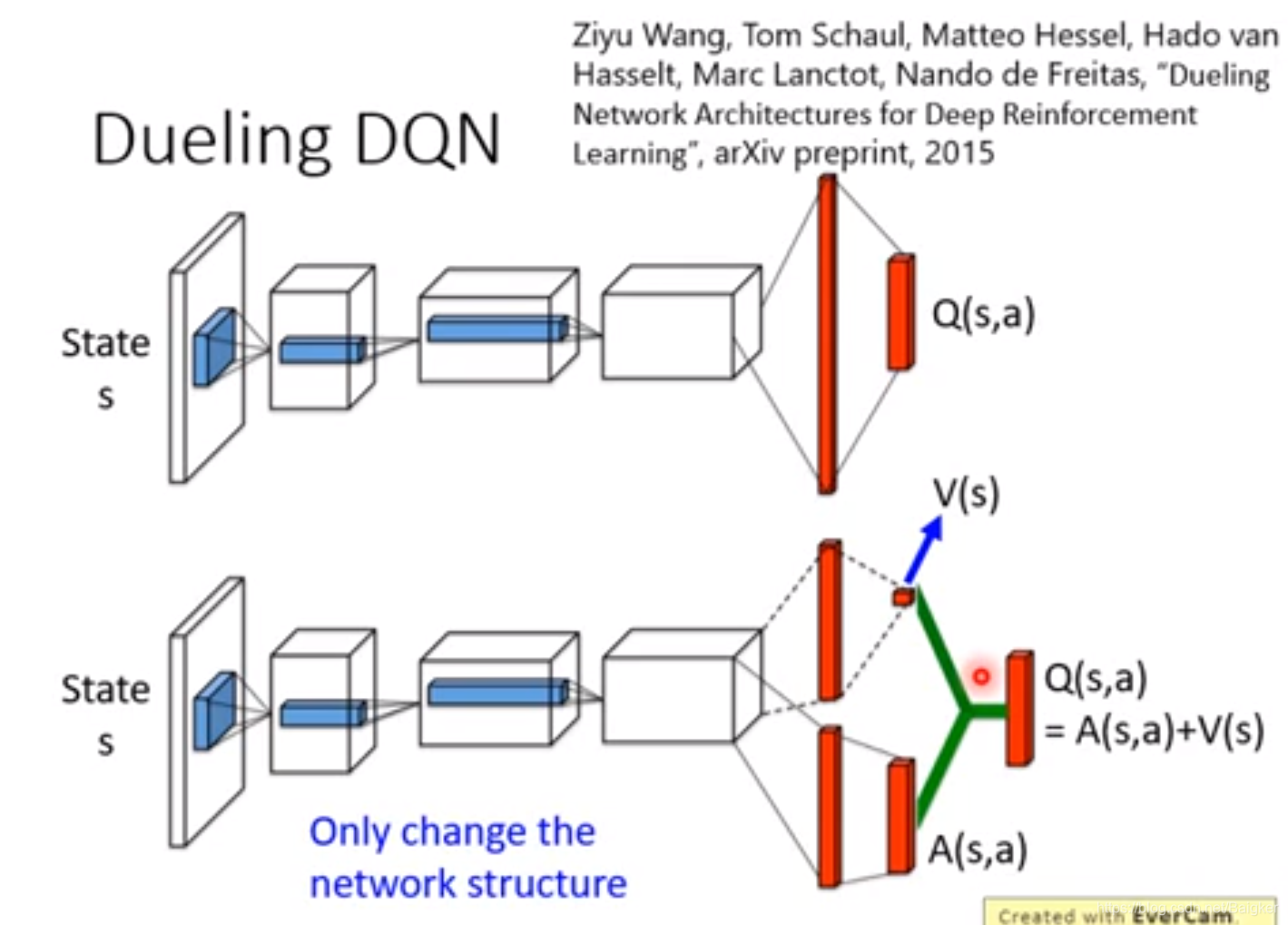
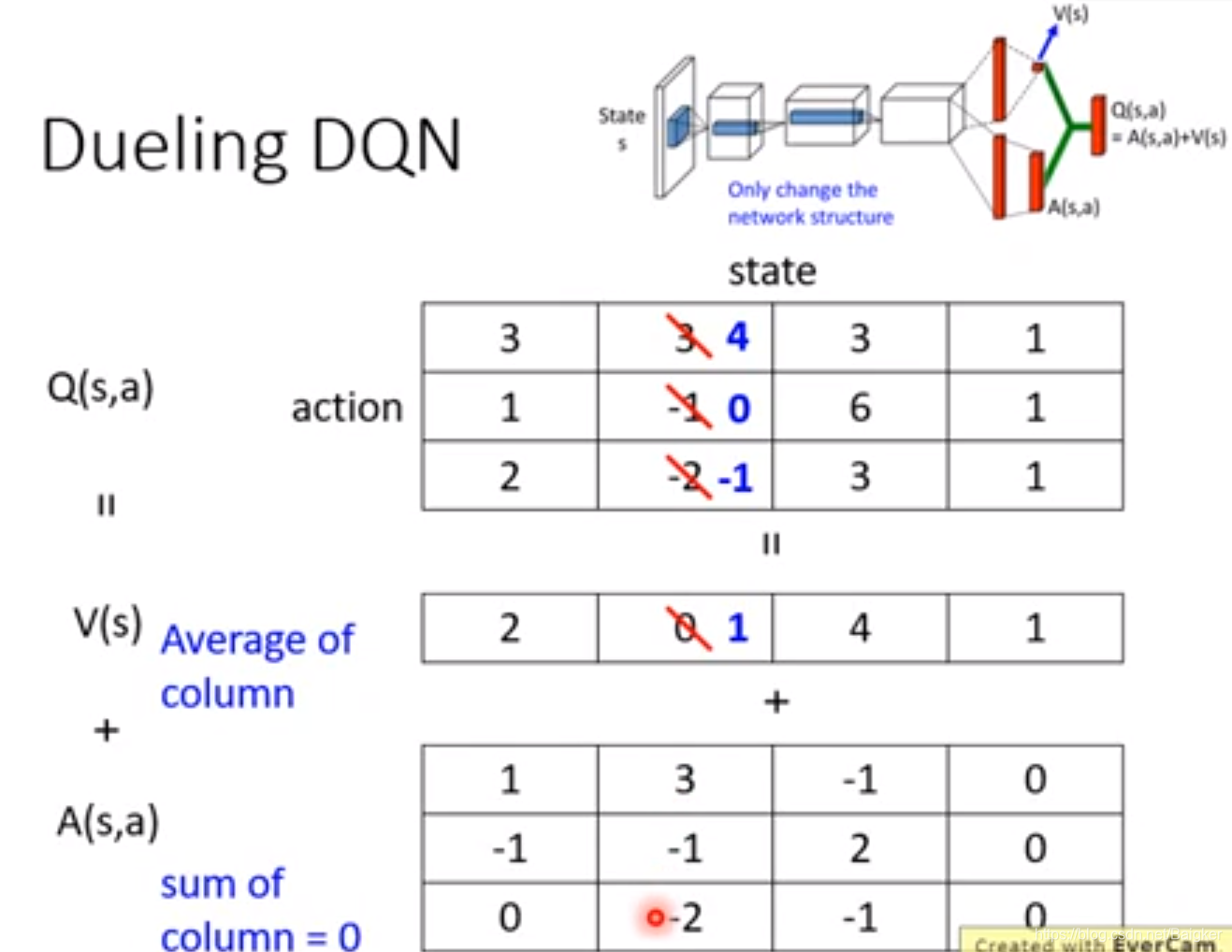
这样的好处是修改数值的时候很方便。
为了防止出问题,我们要让NN尽量改V而不是A。因此要做如下限制。
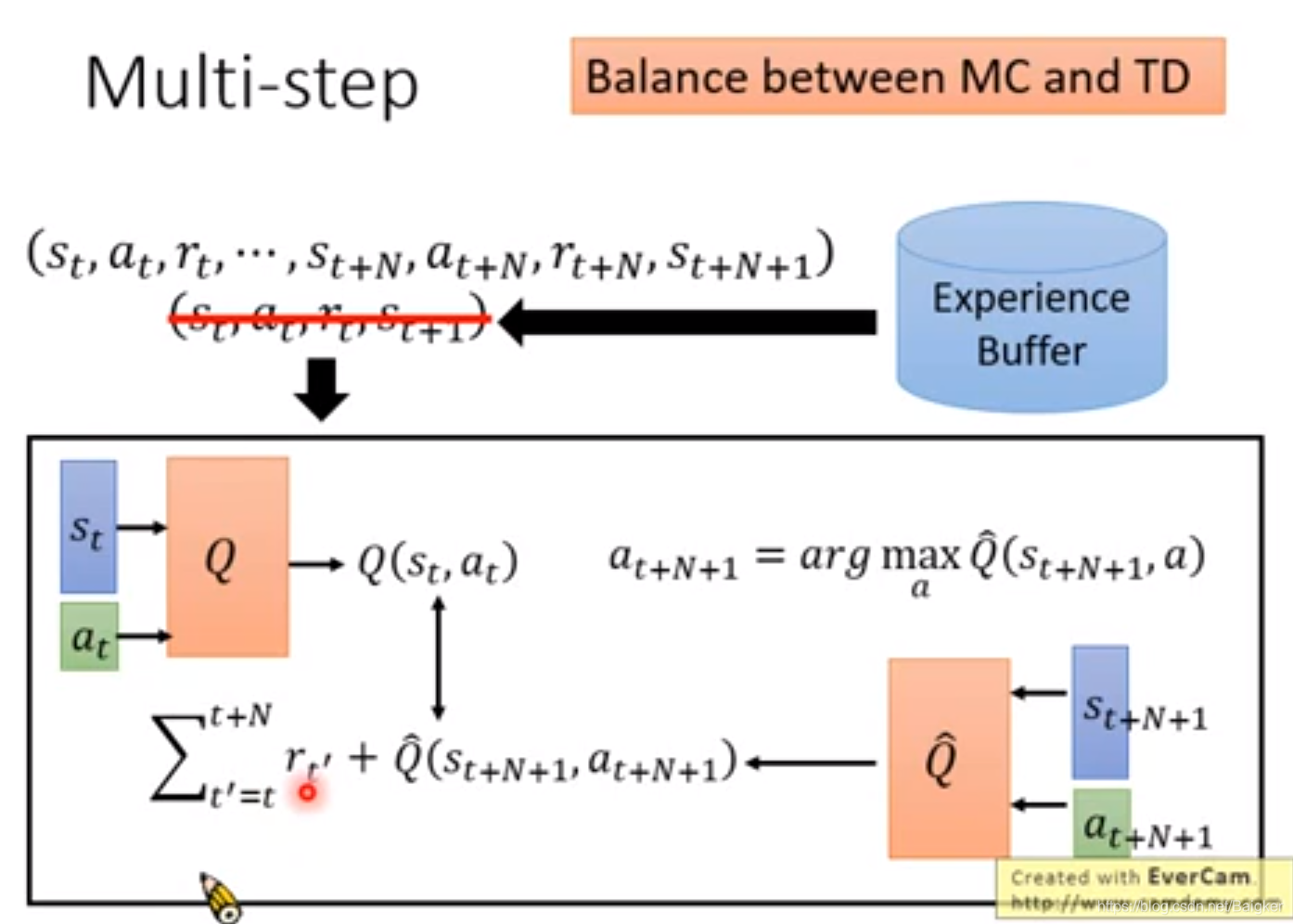
Muti-Step
我们可以平衡一下MC和TD方法。
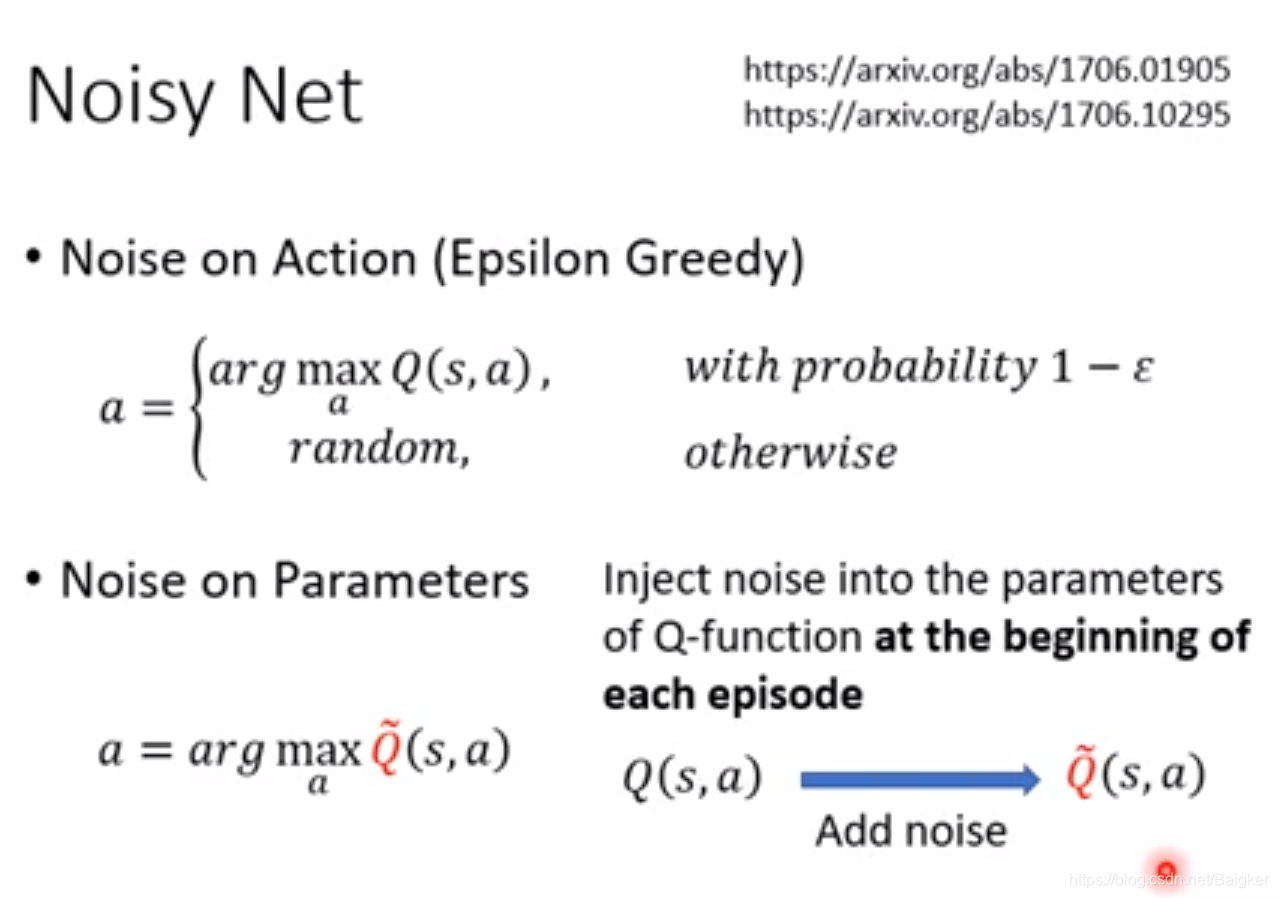
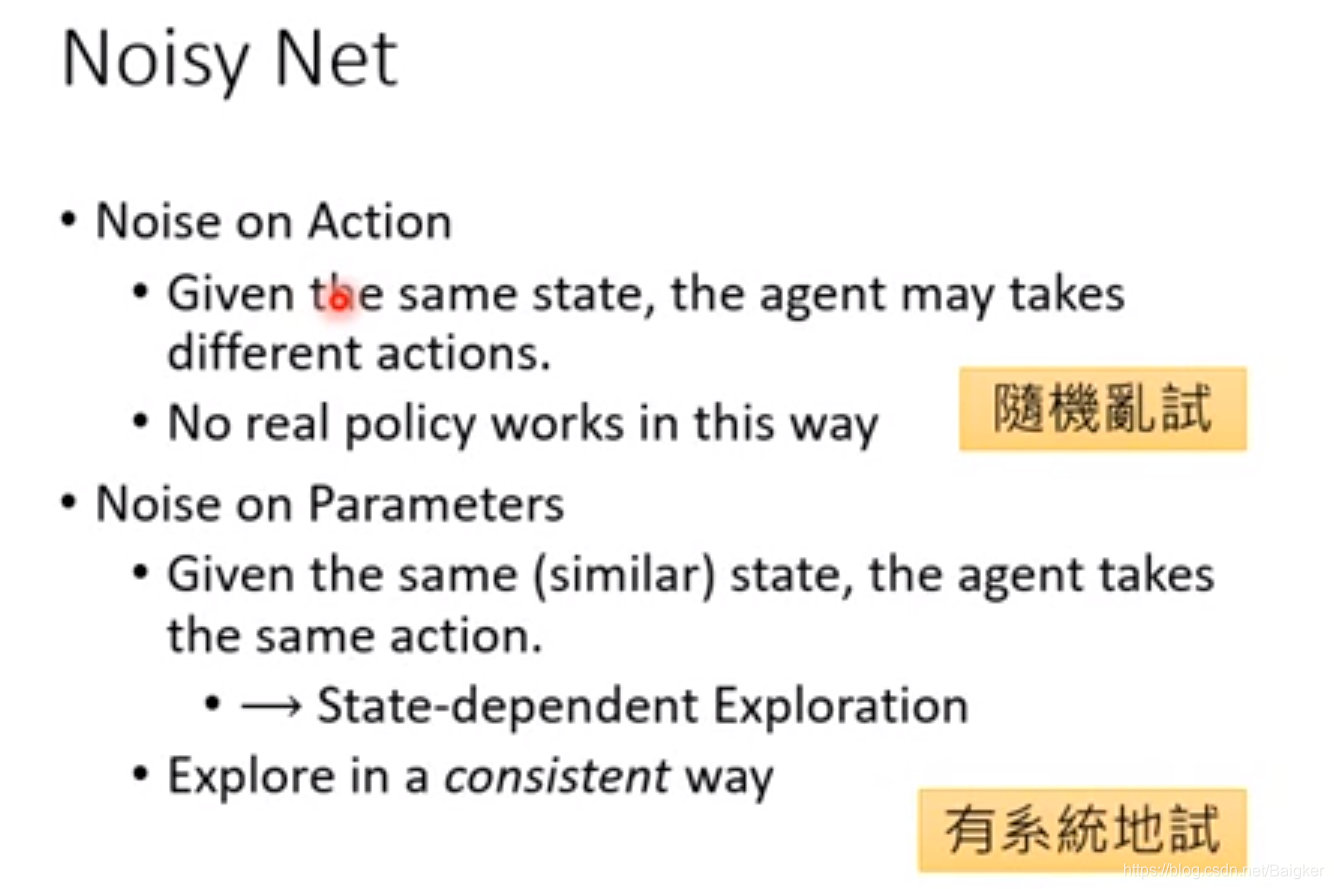
Noisy Net
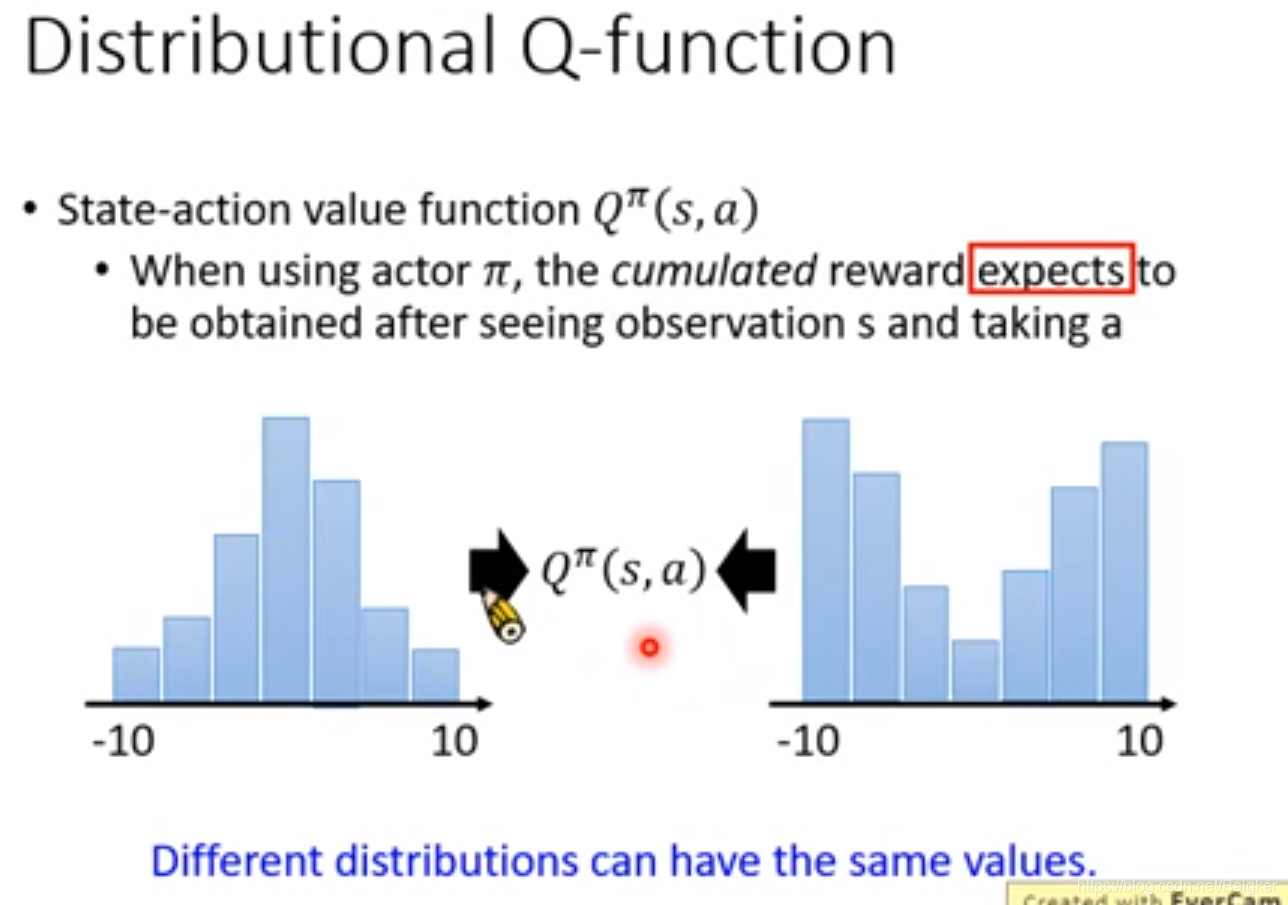
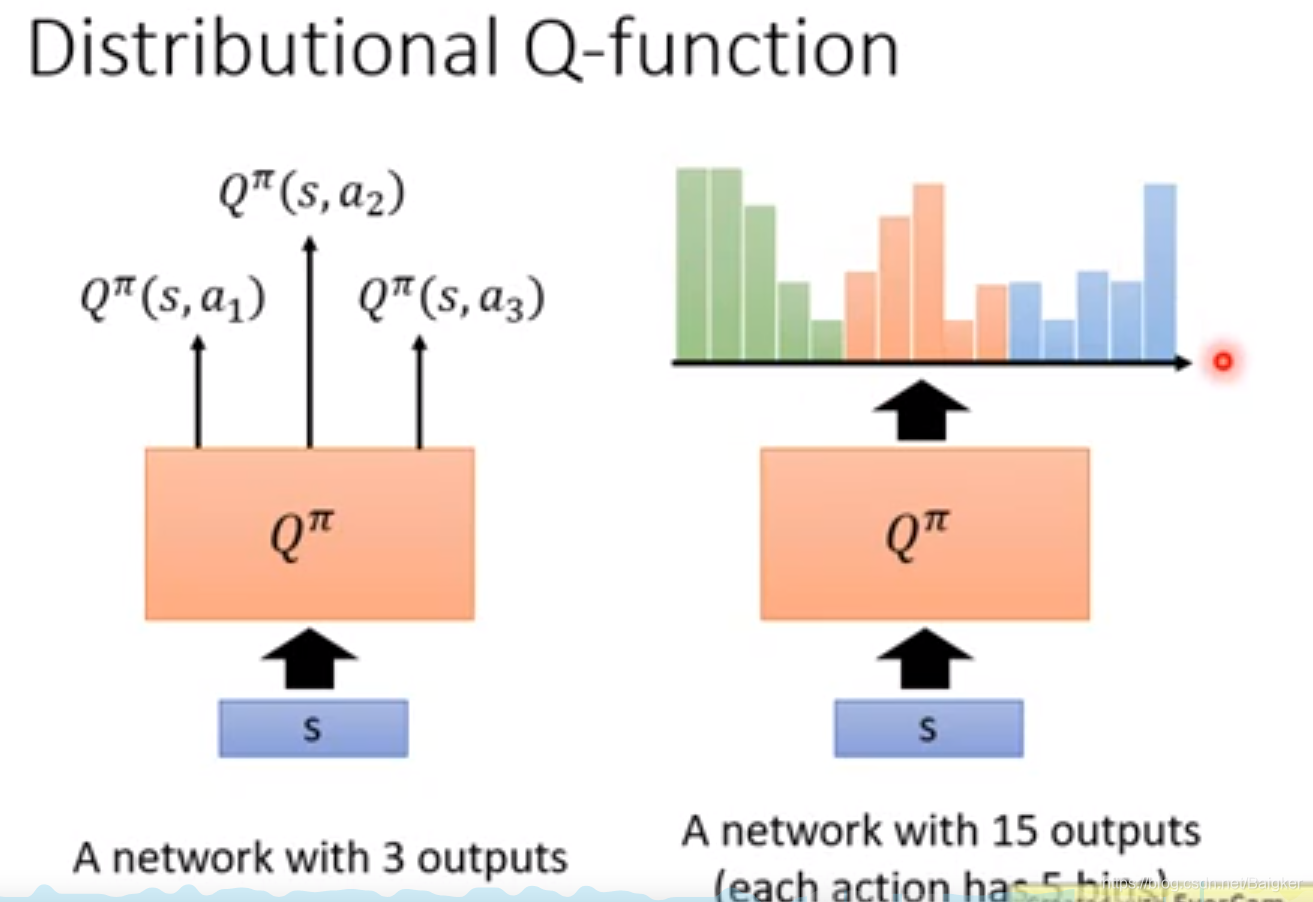
Distributional Q-function
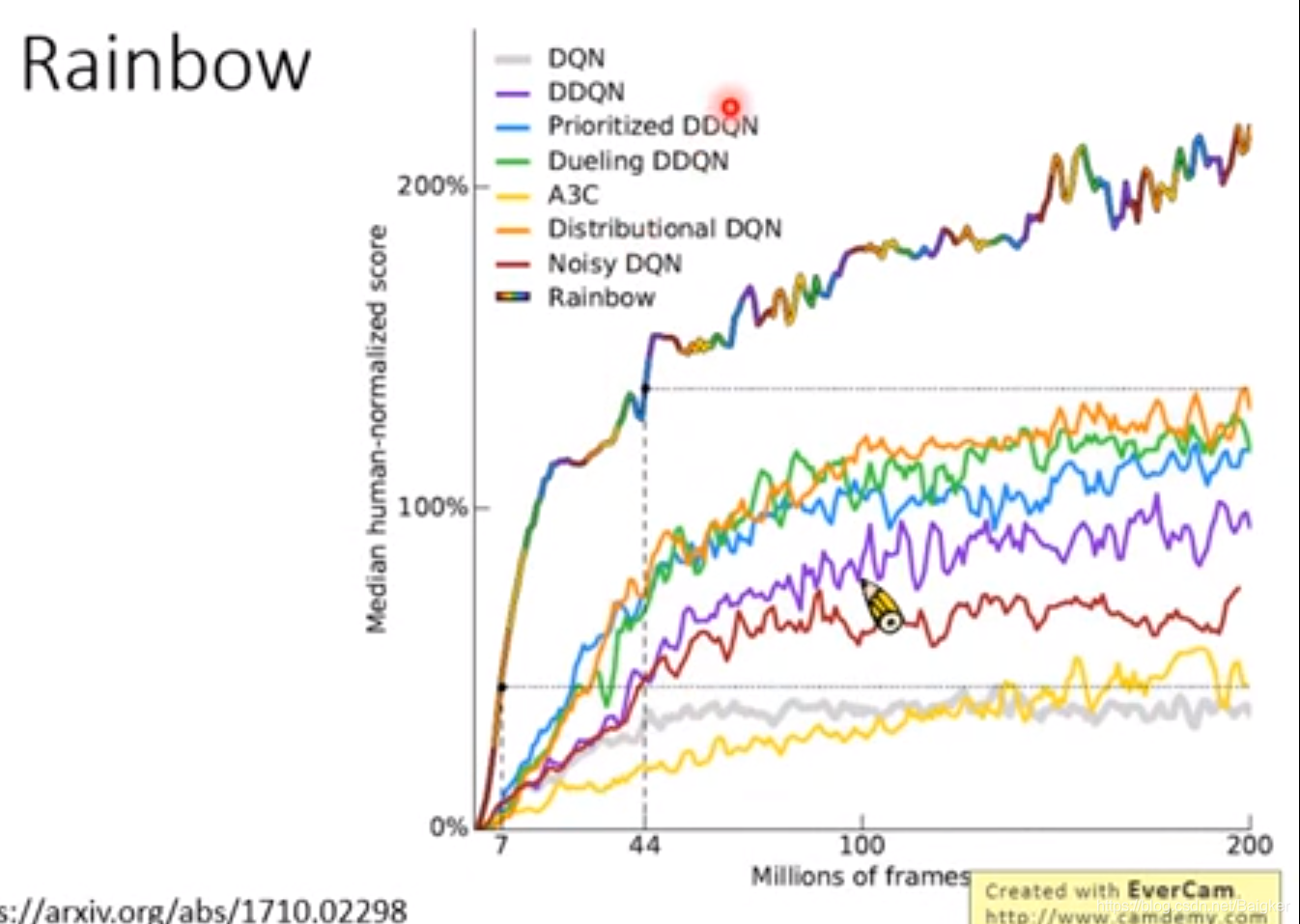
Rainbow
Rainbow就是把这一堆技术全用起来。
个人感觉是瞎搞,用处不大。
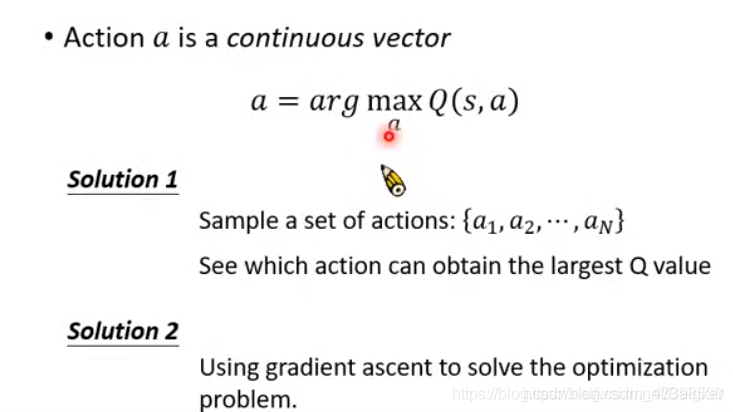
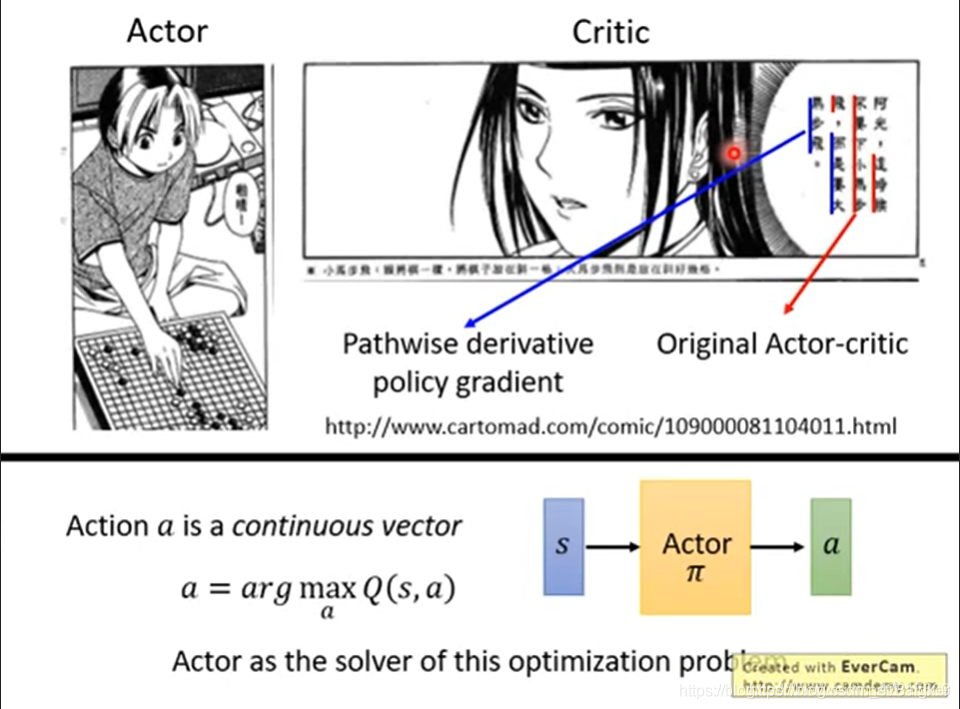
连续Q-learning
当动作是一个连续的向量
a
=
arg
?
max
?
a
Q
(
s
,
a
)
a=\arg \max _{a} Q(s, a)
a=argmaxa?Q(s,a)
这个式子就不能通过穷举计算得出,所以我们要怎样进行选择呢。
方法一:大力枚举。会丢失精度;
方法二:Gradient Descent。会大幅降低速度。
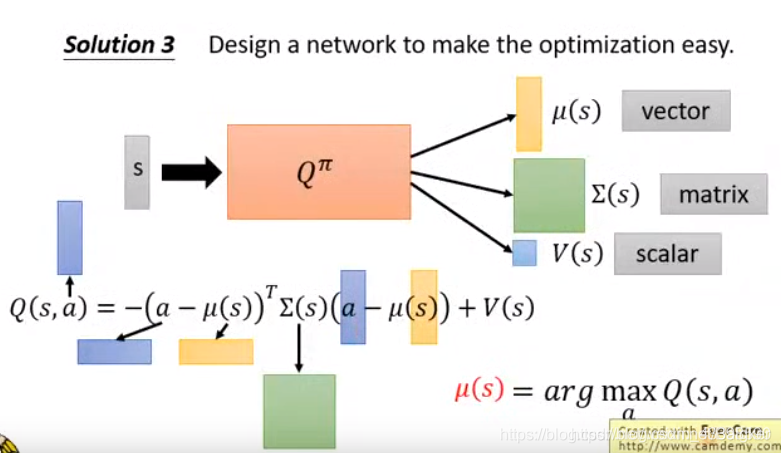
方法三将
Q
Q
Q拆成一个向量
μ
(
s
)
μ(s)
μ(s)、一个矩阵
Σ
(
s
)
Σ(s)
Σ(s)和一个标量
V
(
s
)
V(s)
V(s)。但实现起来十分复杂。
我们还可以使用别的方法:不用Q-Learning,而是用Actor+Critic。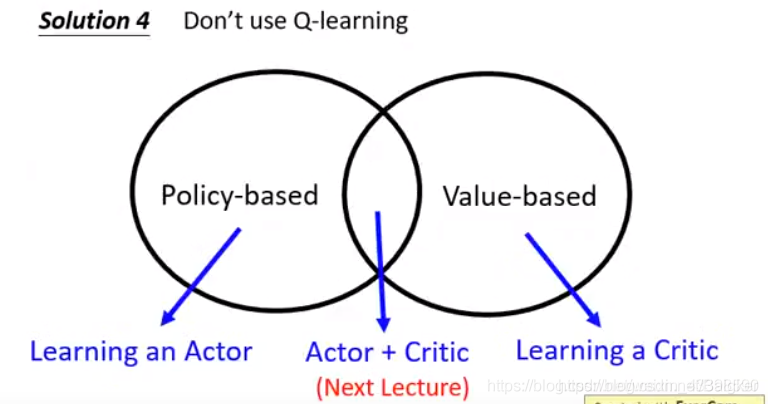
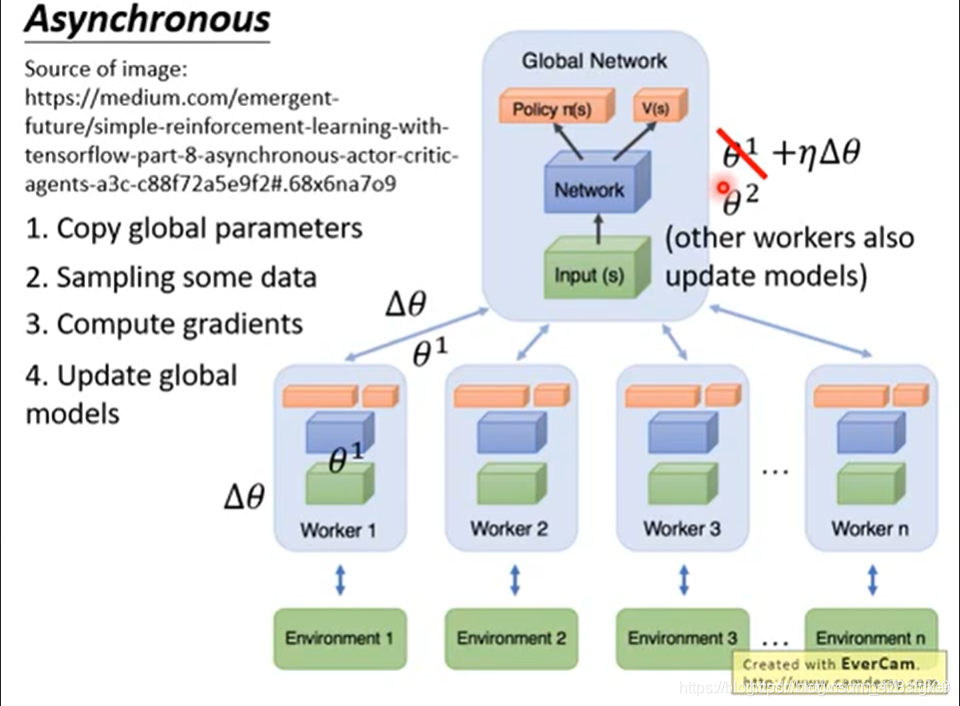
Actor+Critic
Actor+Critic最有名的算法就是A3C。其实A3C实现起来并不难,就是把Policy的公式部分内容用Critic里的函数替代就行了,如下:
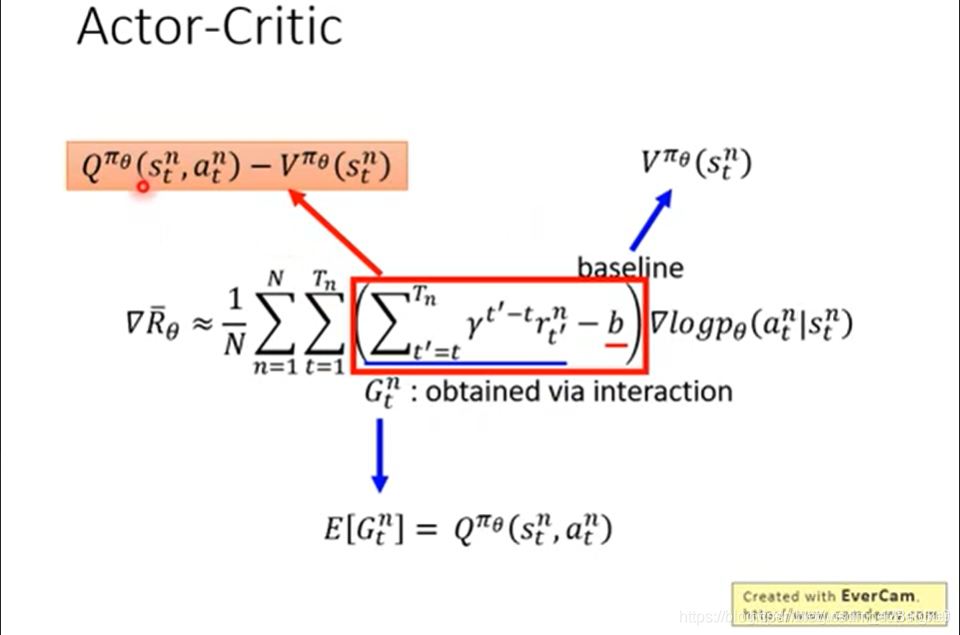
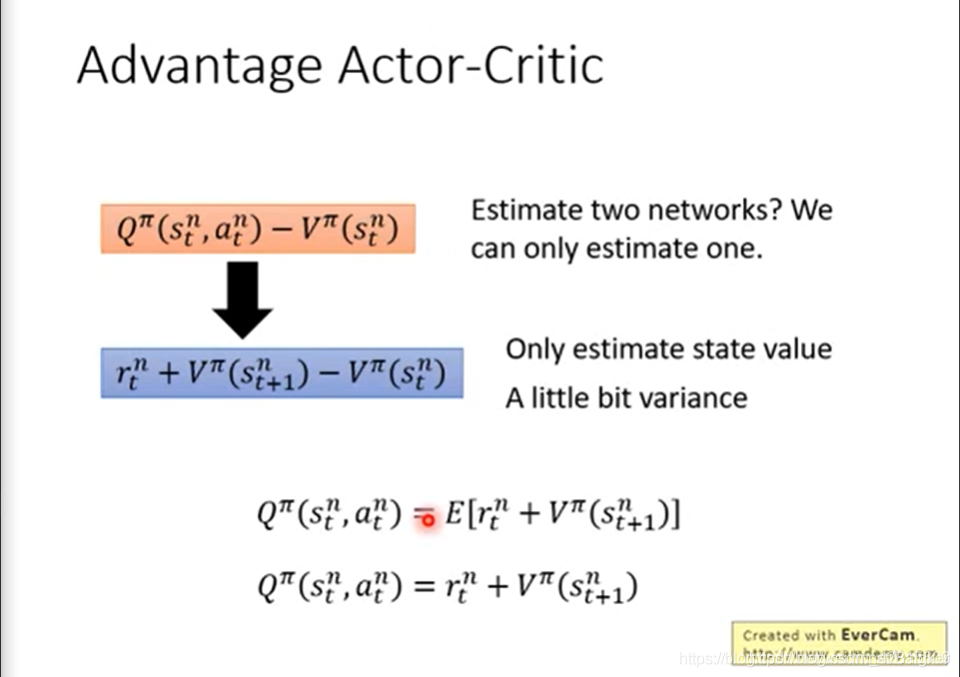
但是,这样可能需要训练两个网络。我们做个变换,利用公式
Q
t
=
E
[
r
t
+
V
(
s
t
+
1
)
]
Q_t=E[r_t+V(s_{t+1})]
Qt?=E[rt?+V(st+1?)]但是,这样其实引入了一个随机的东西,即
r
r
r。
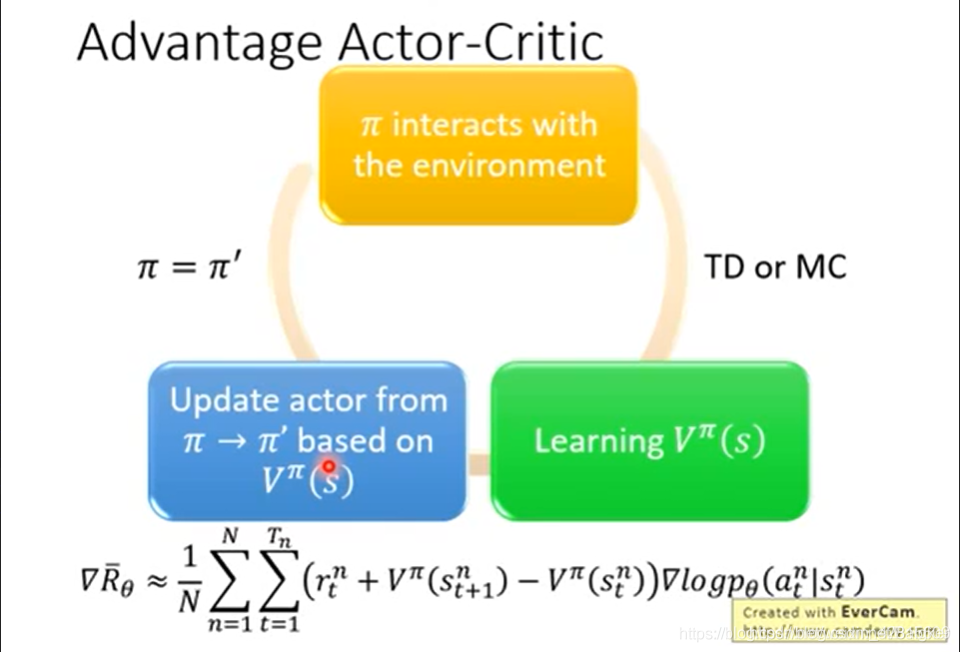
整个流程如下:用
π
\pi
π去与环境互动,得到数据,通过 TD 或 MC 的方法,从数据中得到
V
V
V的估值,并且按照上式对
π
π
π进行梯度下降。
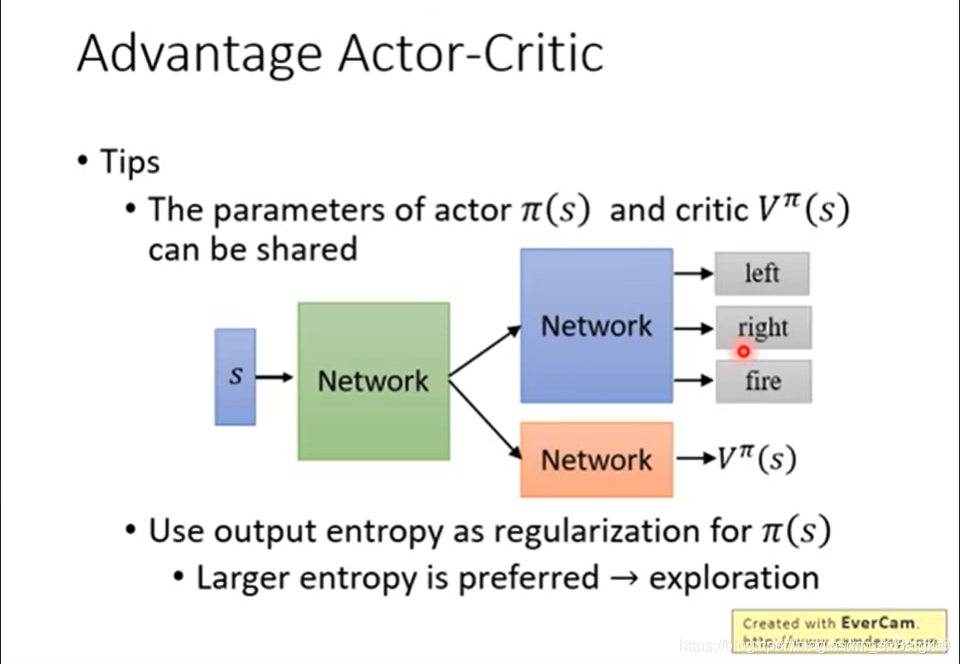
在训练时,可以共享一些参数。此外,还可以对
π
(
s
)
\pi(s)
π(s)做熵值的正则。
此外,为了提升速度,我们还可以同时开几个 worker (一个 worker 一个 CPU),并行地与环境互动,计算出梯度,传回去。
Pathwise derivative policy gradient
传统的Actor-critic只会对State和Action做出评价。
而在 Pathwise derivative policy gradient 中,不但告诉 actor 好坏,还告诉其该怎么做。
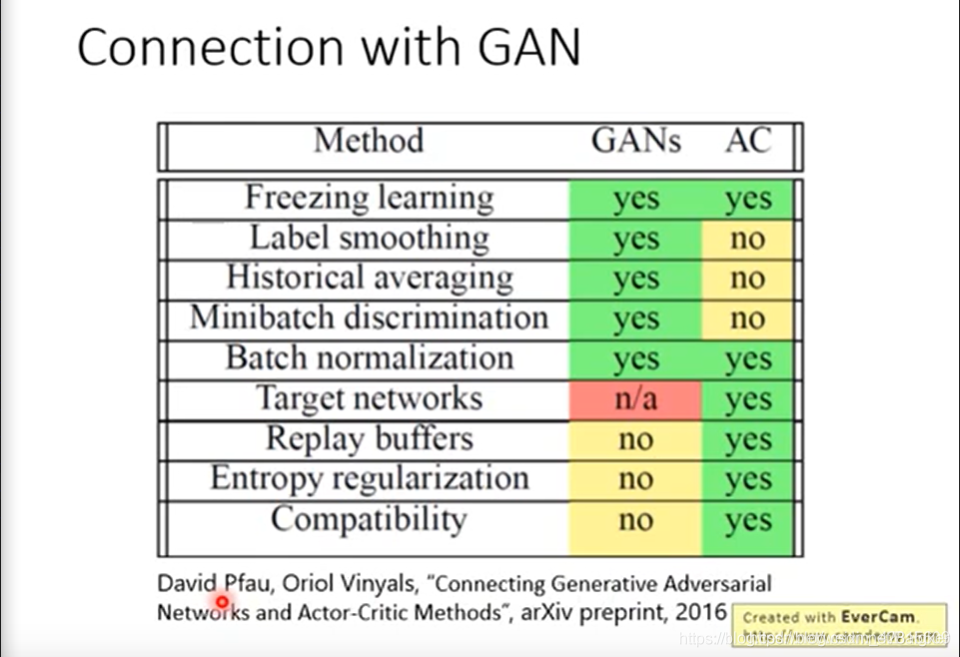
实现中,我们要使用 GAN 的架构。Q 与 Actor 分别训练。在训练 Actor 时,就将 Q 固定住。
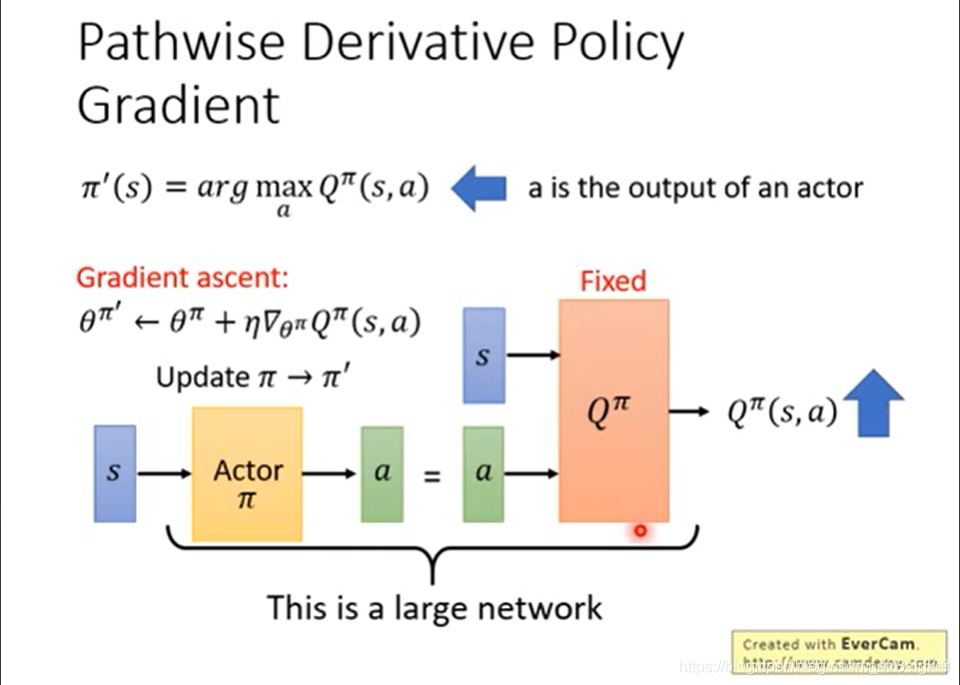
此外,在 Q-Learning 中好用的技巧,这里都可以用到。
如果需要求
a
a
a,直接从
π
(
s
)
\pi(s)
π(s)输出就好。
但是,如上,其与GAN很相似,但是都是很难训练的。