JetsonTX2 :
?JetsonTX2 ϵ�� (1)Ӳ��ϵͳ����
?Jetson TX2 ϵ��(2)����ϵͳ����
?Jetson TX2 ϵ��(3)���ѧϰ�����(Pytorch)
?Jetson TX2 ϵ��(4)ORB_SLAM2 �����
?Jetson TX2 ϵ��(5)Ubuntu18.04 ��װ��ʹ��
?Jetson TX2 ϵ��(6)ORB_SLAM2��ROS�Ŀ���IDE����(clion��VSCode)
?������Ҫ��ɻ���Ubuntu18.04��TX2��ROS��ʹ��RealsenseD455����ORB_SLAM2������˹�����
Ŀ¼
0. ���:
0.1 Intel? RealSense? SDK 2.0�İ�װ
realsense-viewer
0.2 realsense-ros�İ�װ
roslaunch realsense2_camera rs_rgbd.launch
rostopic list
rviz

0.3 ORB_SLAM2�İ�װ
cd catkin_ws/src/ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh
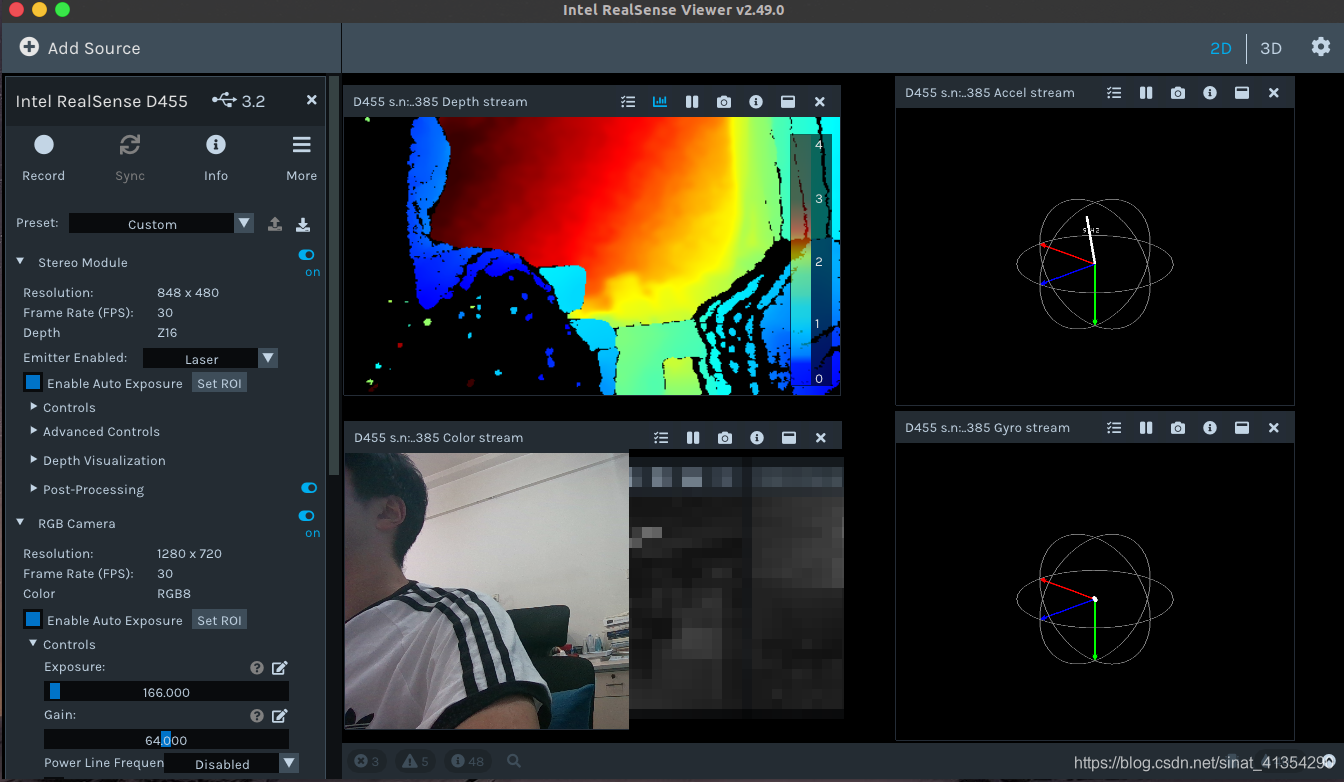
0.4 RealsenseD455�ı궨
#TODO
����Զ��궨
��Ҫ����:
- ��������������ȽϷḻ�Ļ���,��һ����ƽ��
- �� realsense_viewer
- �� ��Stereo Module�� �еġ�Emitter Enabled�� ����Ϊ ��Laser��
- �� ��More�� �����˵���ѡ�� ��On-Chip Calibration��
- ѡ�� ��Calibrate��
- �鿴 ��Health-Check�� ����ֵ, һ��С�� 0.25 �ǿ��Խ��ܵġ�
- ����µı궨������֮ǰ�ĺ�,�� ��Apply New�� ���µIJ������� Firmware �С�
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
1. ���Ƶ�ͼ����
1.1 ����tum���ݼ��������Ƶ�ͼ
-
����Դ�ļ�
git clone https://gitee.com/l-j-l/ORBSLAM2_with_pointcloud_map.git ORB_SLAM2_modified -
����Vocabulary�ļ���
cp -r Vocabulary/ ../ORB_SLAM2_modified/ORB_SLAM2_modified/ -
ɾ��build�ļ���
rm -rf Thirdparty/DBoW2/build/ rm -rf Thirdparty/g2o/build/ -
����
.build.h -
����
./bin/rgbd_tum Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1.yaml ~/dataset/rgbd_dataset_freiburg1_desk ~/dataset/rgbd_dataset_freiburg1_desk/associations.txtORBSLAM_with_pointcloud_map�δ���(������ת��)�ο�: ��ORBSLAM_with_pointcloud_map�δ���(������ת��)����һ�ֽ������
��CMAKELISTS��ɾ��-march=nativeset(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ") set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")��Thirdparty/g2o/CMakeLists.txt��ɾ��-march=native
# Compiler specific options for gcc SET(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -O3 -march=native") SET(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -O3 -march=native") -
��ɫ����
��~/ORB_SLAM2_modified/include/Tracking.h �� ~/ORB_SLAM2_modified/src/Tracking.cc�ļ�
declare mImRGB in Tracking.h as following:
�C106�ШC
Frame mCurrentFrame; cv::Mat mImRGB;//declared cv::Mat mImGray;

Secondly, modify the Tracking.cc as following:
Modified place 1:
cv::Mat Tracking::GrabImageRGBD(const cv::Mat &imRGB,const cv::Mat &imD, const double ×tamp)
{
mImRGB = imRGB;//Modified place 1
mImGray = imRGB;
��
Modified place 2:
mpPointCloudMapping->insertKeyFrame( pKF, this->mImGray, this->mImDepth );//change the mImGray to mImRGB as next row
mpPointCloudMapping->insertKeyFrame( pKF, this->mImRGB, this->mImDepth );//Modified place 2�C208�ШC

�C1142�ШC

���±���ϵͳcd /build make -j8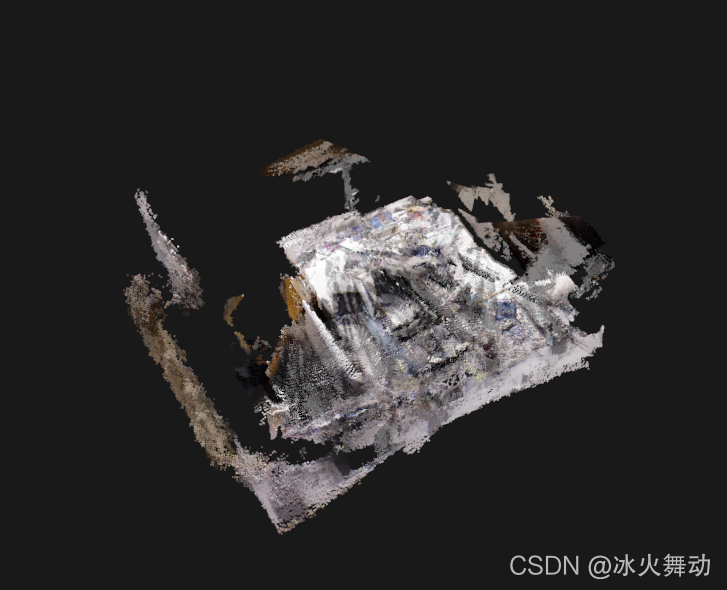
-
����ROS�ĵ��Ƶ�ͼ����
1.�����ǽ� ROS �ļ�����·�����뵽 ROS_PACKAGE_PATH ���������С������������ ~/.bashrc �ļ�ĩβ�����������:export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/catkin_ws/src/ORB_SLAM2_modified/ORB_SLAM2_modified/Examples/ROS2.�� PCL ��ص��������ӵ�~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txt �ļ��С�
����һ���߲���ʦ����������,���ƽ�ͼû����ROS�汾,������Ҫ������,���������,����ֱ��gitһ�������汾:git clone https://github.com/wylnii/ORBSLAM2_with_pointcloud_map.git... find_package(Eigen3 3.1.0 REQUIRED) find_package(Pangolin REQUIRED) find_package( PCL 1.7 REQUIRED ) ####### 1 include_directories( ${PROJECT_SOURCE_DIR} ${PROJECT_SOURCE_DIR}/../../../ ${PROJECT_SOURCE_DIR}/../../../include ${Pangolin_INCLUDE_DIRS} ${PCL_INCLUDE_DIRS} ####### 2 ) add_definitions( ${PCL_DEFINITIONS} ) ####### 3 link_directories( ${PCL_LIBRARY_DIRS} ) ####### 4 set(LIBS ${OpenCV_LIBS} ${EIGEN3_LIBS} ${Pangolin_LIBRARIES} ${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so ${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so ${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so ${PCL_LIBRARIES} ####### 5 ) ...3.���б���
ɾ��~/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/build�ļ���,����build_ros.sh��
4.�����ݲ���yaml�ļ�
�ھ������ʱ,���Ǹ����� TUM1.yaml �ļ�,����Ϊ TUM1_ROS.yaml,�����еIJ��� DepthMapFactor: 1.0:��factor = 5000 # for the 16-bit PNG files,OR: factor = 1 # for the 32-bit float images in the ROS bag files��5.����
roscore rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1_ROS.yaml rosbag play datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/rgb/image_raw /camera/depth/image:=/camera/depth_registered/image_raw��������û�н��в���,��Ϊû������bag��ʽ�����ݼ�, tum bag������
-
�����ͼ
�߲���ʦ�ij���ֻ��ʵʱ�鿴���Ƶ�ͼ,���ܱ��档���ļ�~/ORB_SLAM2_modified/src/pointcloudmapping.cc,���� PCL ��� pcl::io::savePCDFileBinary ����������Ƶ�ͼ,
1.���ļ�,����ͷ�ļ�#include <pcl/io/pcd_io.h>�C123 �ШC
... for ( size_t i=lastKeyframeSize; i<N ; i++ ) { PointCloud::Ptr p = generatePointCloud( keyframes[i], colorImgs[i], depthImgs[i] ); *globalMap += *p; } pcl::io::savePCDFileBinary("vslam.pcd", *globalMap); // ֻ��Ҫ������һ�� ...2.����
cd ~/ORB_SLAM2_modified/build make -j83.�鿴���Ƶ�ͼ
sudo apt-get install pcl-tools pcl_viewer vslam.pcd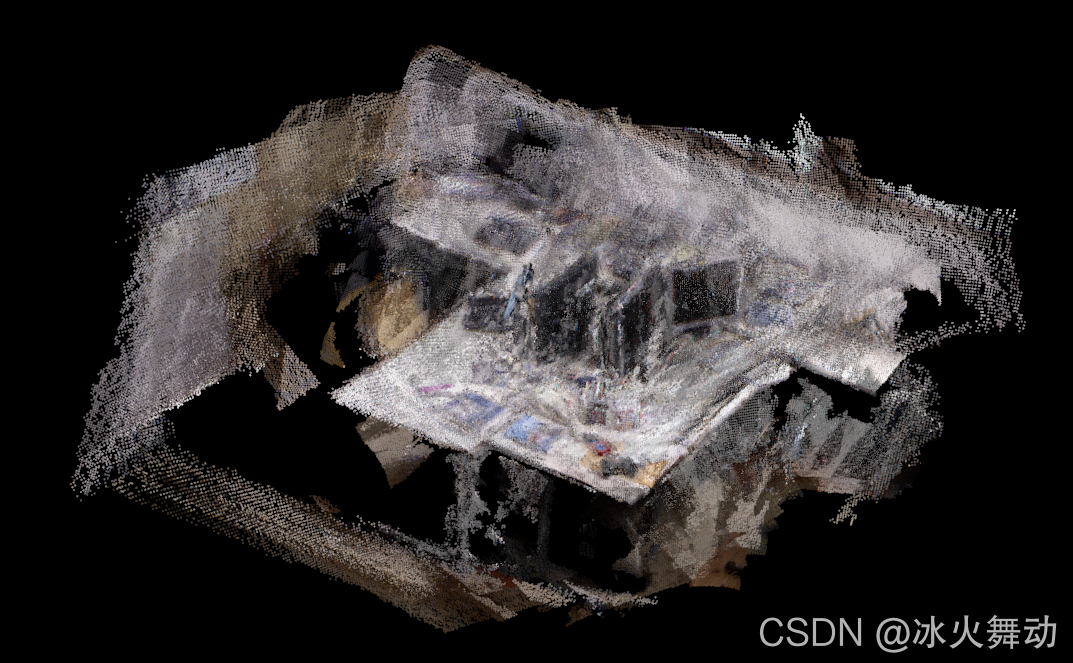
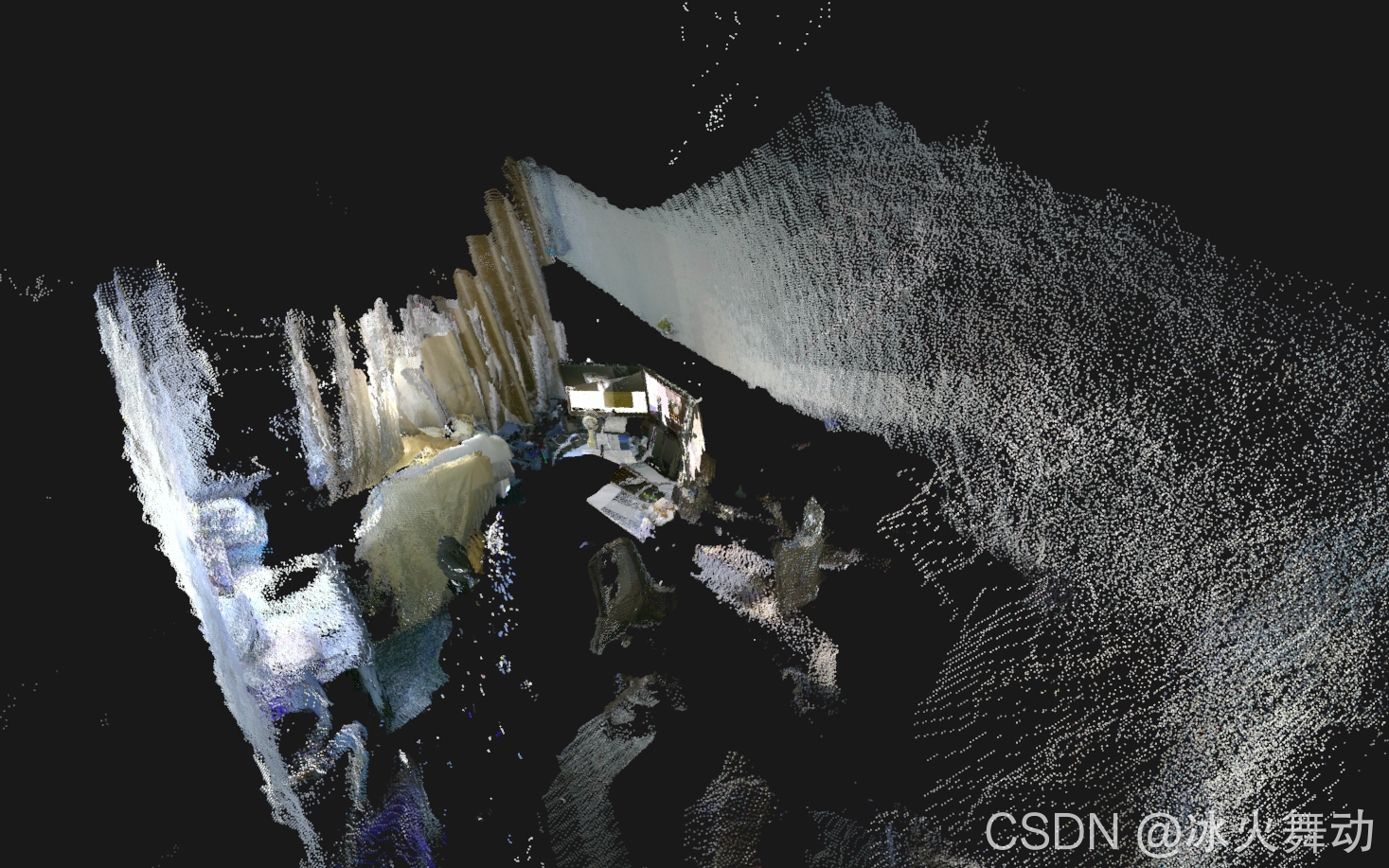
1.2 RealSense D455 �������Ƶ�ͼ
-
��yaml�����ļ�
yaml�ļ�����������ڲ�,����ͨ��rostopic /camera/color/camera_info��á�
`RealSense.ymal:#-------------------------------------------------------------------------------------------- # Camera calibration and distortion parameters (OpenCV) Camera.fx: 920.2216186523438 Camera.fy: 918.2052612304688 Camera.cx: 648.8403930664062 Camera.cy: 363.62689208984375 Camera.k1: 0.0 Camera.k2: 0.0 Camera.p1: 0.0 Camera.p2: 0.0 Camera.k3: 0.0 Camera.width: 1280 Camera.height: 720 #Camera frames per second Camera.fps: 30.0 #IR projector baseline times fx (aprox.) Camera.bf: 46.01 #Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) Camera.RGB: 1 #Close/Far threshold. Baseline times. ThDepth: 40.0 #Deptmap values factor,���������ֵת��Ϊʵ�ʾ���,ԭ����λ�� mm,ת���� m DepthMapFactor: 1000.0 #ORB Parameters #-------------------------------------------------------------------------------------------- #ORB Extractor: Number of features per image ORBextractor.nFeatures: 1000 #ORB Extractor: Scale factor between levels in the scale pyramid ORBextractor.scaleFactor: 1.2 #ORB Extractor: Number of levels in the scale pyramid ORBextractor.nLevels: 8 #ORB Extractor: Fast threshold #Image is divided in a grid. At each cell FAST are extracted imposing a minimum response. #Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST #You can lower these values if your images have low contrast ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7 #-------------------------------------------------------------------------------------------- #Viewer Parameters #-------------------------------------------------------------------------------------------- Viewer.KeyFrameSize: 0.05 Viewer.KeyFrameLineWidth: 1 Viewer.GraphLineWidth: 0.9 Viewer.PointSize:2 Viewer.CameraSize: 0.08 Viewer.CameraLineWidth: 3 Viewer.ViewpointX: 0 Viewer.ViewpointY: -0.7 Viewer.ViewpointZ: -1.8 Viewer.ViewpointF: 500 -
�� pointcloudmapping.cc�ļ�
�C126 �ШCvoxel.setInputCloud( globalMap ); voxel.setLeafSize (0.02f, 0.02f, 0.02f); # ���ڵ����ܶ� voxel.filter( *tmp );�C73�ШC
p.y = - ( m - kf->cy) * p.z / kf->fy; # ��ԭ���ߵ��ĵ��Ƶ�ͼ���·�ת,����۲� p.r = color.ptr<uchar>(m)[n*3]; # ����ɫ��ʾ p.g = color.ptr<uchar>(m)[n*3+1]; p.b = color.ptr<uchar>(m)[n*3+2]; -
�Ķ��Ļ���
����catkin_ws/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src·����,�ҵ�ros_rgbd.cc,��:message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/aligned_depth_to_color/image_raw", 1); -
����
roscore roslaunch realsense2_camera rs_rgbd.launch rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/RealSense.yaml /camera/rgb/image_raw:=/camera/color/image_raw /camera/depth_registered/image_raw:=/camera/aligned_depth_to_color/image_raw
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/RealSense.yaml /camera/rgb/image_raw:=/camera/color/image_raw /camera/depth_registered/image_raw:=/camera/aligned_depth_to_color/image_raw
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1U.yaml /camera/rgb/image_raw:=/camera/color/image_raw /camera/depth_registered/image_raw:=/camera/aligned_depth_to_color/image_raw
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.bin Examples/RGB-D/TUM1U.yaml
��������ͨ��:
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1_ROS.yaml
��launch�ļ�~/readme/realsense/Realsense-Ros/catkin_ws/src/realsense/realsense2_camera/launch
<launch>
<arg name="serial_no" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="fisheye_width" default="640"/>
<arg name="fisheye_height" default="480"/>
<arg name="enable_fisheye" default="true"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="true"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="hold_back_imu_for_frames" default="true"/>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
</include>
</group>
</launch>
????
������е�ʱ�������ٵ�������,�����ɵ���,�������ɵĺ���,��Ѳ����ļ��е�DepthMapFactor: 1000.0 ��Ϊ5000.0
rostopic echo /camera_info
ROS������CameraInfo��Ϣ
---
header:
seq: 1407
stamp:
secs: 1629859962
nsecs: 194228888
frame_id: "camera_color_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [-0.05550055205821991, 0.06508966535329819, -0.0003226370026823133, 0.0005384536925703287, -0.020686540752649307]
K: [381.16790771484375, 0.0, 320.990966796875, 0.0, 380.8759460449219, 243.68350219726562, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [381.16790771484375, 0.0, 320.990966796875, 0.0, 0.0, 380.8759460449219, 243.68350219726562, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
.build_ros.sh
/usr/bin/ld: warning: libopencv_core.so.3.2, needed by /opt/ros/melodic/lib/libcv_bridge.so, may conflict with libopencv_core.so.3.4