目录
先谈一下边缘检测算法sobel

? ? ? ? 关于上图图像的边缘,图像中像素灰度值变化没有规律。一种比较好的描述这种变化的方法是采用导数。其中梯度剧烈变化的地方代表图像灰度值变化强烈的地方,也就是边缘。
????????为了更好的说明,以1维图像(也就是图像的1行)为例。边缘出现在灰度值跳变的地方,如下图所示:?

?如果对上面的1维图像求导数,得到下图,可以很明显的看到边缘所在的位置。

????????从上面的解释,我们可以设置一个阈值,根据局部像素变化强烈程度获取图像边缘。
????????sobel算子是一个离散微分算子,计算得到的是图像梯度的近似值。sobel算子结合了高斯平滑和微分。
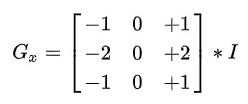
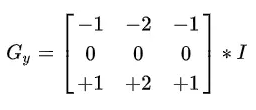
????????假设输入图像是I,,核大小为3,通过下面运算分别计算水平方向和垂直方向的微分:
a.水平方向:
?b.垂直方向:
?具体运算为:

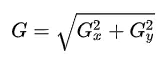
结合上面结果可以计算出图像中一个点的近似梯度: ?
?或者表示为:
![]()
Scharr算子
Scharr()?函数提供了比标准Sobel函数更精确的计算结果。它使用了下面的核:

?除了卷积核与Sobel不同,在其余方面它与Sobel基本一致。
?Laplacian()拉普拉斯算子
Sobel边缘检测原理是利用边缘区域像素值的跳变。通过求一阶导数,可以使边缘值最大化。如下图所示:

那么,如果求二阶导数会得到什么呢? ?

????????可以观察到边缘处于二阶导数为0的地方。因此,可以利用该方法获取图像中的边缘。然而,需要注意的是二级导数为0的不只出现在边缘地方,还可能是一些无意义的位置,根据需要通过滤波处理该情况。
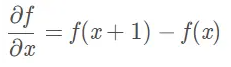
????????现在我们来讨论二阶微分,它是拉普拉斯算子的基础,与微积分中定义的微分略有不同,数字图像中处理的是离散的值,因此对于一维函数的一阶微分的基本定义是差值:
?类似的,二阶微分定义为:

?将一维函数扩展到二维:

二阶微分的定义保证了以下几点:
1、在恒定灰度区域的微分值为0
2、在灰度台阶或斜坡的起点处微分值非零
可以看出,二阶微分可以检测出图像的边缘、增强细节
由于图像是二维的,因此需要分别获取两个方向的导数,拉普拉斯算子用下面公式定义:
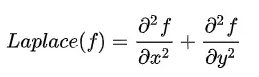
?其中:

?可以用多种方式将其表示为数字形式。对于一个3*3的区域,一般情况下被推荐最多的形式是:

?实现上式的滤波器模板为:
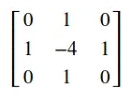
?我们发现,拉普拉斯算子不需要像Sobel算子那样分别对x,y方向进行处理,它可以直接处理 .
较为复杂的图像拉普拉斯算子的效果也并不是很好,由于二阶微分一定的局限性,目前的边缘检测还不够完美,我们需要一种综合的算法,类似 canny()
边缘检测算法通常有四个步骤:
(1)滤波:边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数的计算对噪声很敏感,因此必须使用滤波器来改善与噪声有关的边缘检测器的性能.需要指出,大多数滤波器在降低噪声的同时也导致了边缘强度的损失,因此,增强边缘和降低噪声之间需要折衷.
(2)增强:增强边缘的基础是确定图像各点邻域强度的变化值.增强算法可以将邻域(或局部)强度值有显著变化的点突显出来.边缘增强一般是通过计算梯度幅值来完成的.
(3)检测:在图像中有许多点的梯度幅值比较大,而这些点在特定的应用领域中并不都是边缘,所以应该用某种方法来确定哪些点是边缘点.最简单的边缘检测判据是梯度幅值阈值判据.
(4)定位:如果某一应用场合要求确定边缘位置,则边缘的位置可在子像素分辨率上来估计,边缘的方位也可以被估计出来.
????????在边缘检测算法中,前三个步骤用得十分普遍。这是因为大多数场合下,仅仅需要边缘检测器指出边缘出现在图像某一像素点的附近,而没有必要指出边缘的精确位置或方向.边缘检测误差通常是指边缘误分类误差,即把假边缘判别成边缘而保留,而把真边缘判别成假边缘而去掉.边缘估计误差是用概率统计模型来描述边缘的位置和方向误差的.我们将边缘检测误差和边缘估计误差区分开,是因为它们的计算方法完全不同,其误差模型也完全不同.
canny() 边缘检测:
????????JohnCanny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法,看下原理:
1、灰度化图像
Canny算法通常处理的图像为灰度图,因此如果摄像机获取的是彩色图像,那首先就得进行灰度化。对一幅彩色图进行灰度化,就是根据图像各个通道的采样值进行加权平均。以RGB格式的彩图为例,通常灰度化采用的方法主要有:
方法1:Gray=(R+G+B)/3
方法2:Gray=0.299R+0.587G+0.114B;(这种参数考虑到了人眼的生理特点)
注意1:至于其他格式的彩色图像,可以根据相应的转换关系转为RGB然后再进行灰度化;
注意2:在编程时要注意图像格式中RGB的顺序通常为BGR。
2、高斯滤波消除噪声
令f(x,y)表示数据(输入源数据),G(x,y)表示二维高斯函数(卷积操作数),fs(x,y)为卷积平滑后的图像。

Guess过程:
用坐标点(x,y)表示一个3x3的邻域,设中心点的坐标为(0,0),相邻的点以此类推。

?计算权重矩阵。设定方差σ2=0.64的值,将对应各个坐标点(x,y)带入二维高斯公式G(x,y)中,得到一个权重矩阵,归一化权重矩阵(矩阵中各个点除以权重之和),得到标准的权重矩阵,即高斯模板。

计算高斯模糊。设在一幅图像中的3×3区域内,用各像素点的灰度值乘以对应点的权重。

?将得到的9个值求和,就是中心点的高斯模糊值。

简单来说就是使用Guess模板在原始图像中进行移位、相乘、相加的过程。
3、计算幅值图像、角度图像,计算图像梯度的方向
求变化率时,对于一元函数,即求导;对于二元函数,求偏导。数字图像处理中,用一阶有限差分近似求取灰度值的梯度值(变化率)。
例:计算一点x方向和y方向的梯度幅值和方向?

????????上图中显示一段直的边缘线段放大后一部分,每个方块代表一个像素点,用一个方框强调点处边缘的幅值和方向。令灰色像素值为0,白色像素值为1。
如图关于一点为中心的?3×3邻域,使用Prewittt卷积模板进行计算:

????????根据x方向和y方向的卷积模板,可知,在3x3的邻域中从底部一行像素值减去顶部一行的像素,得到x方向的偏导数(梯度);同样,从右边一列像素值减去左边一列的像素,得到y方向的偏导数。
x方向的梯度:
![]()
?y方向的梯度:
![]()
?由此,可以得到该点梯度的幅值和方向:

?如下图表示了中心点的梯度向量、方位角以及边缘方向。(任一点的边缘与梯度向量正交):

?Canny算子的卷积模板为:


4、对幅值图像进行非极大值抑制
首先将角度划分成四个方向范围:水平(0°)、?45°、垂直(90°)、+45°如下图:

?接着讨论对3x3区域的四个基本边缘方向进行非极大值抑制。

?做法:若中心点(即:访问点)在沿其方向上邻域的梯度幅值最大,则保留;否则,抑制。
5、双阈值检测和连接边缘,滞后阈值
????????经过前面四步,就只剩下0和可能的边缘梯度值了,为了最终确定下来,需要设定高低阈值:

- 像素点的值大于最高阈值,那肯定是边缘(上图A)
- 同理像素值小于最低阈值,那肯定不是边缘
- 像素值介于两者之间,如果与高于最高阈值的点连接,也算边缘,所以上图中C算,B不算
?推荐的高低阈值TH和TL比在2:1到3:1之间。
????????取出非极大值抑制后的图像中的最大梯度幅值,定义高低阈值。即:TH×Max,TL×Max (当然可以自己给定)?;
????????将小于低阈值的点抛弃,赋0;将大于高阈值的点立即标记(这些点就是边缘点),赋1;
????????将小于高阈值,大于低阈值的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋??1)。
canny()测试,测试图片:

测试代码:
import cv2
import numpy as np
img = cv2.imread('handwriting.jpg', 0)
edges = cv2.Canny(img, 18, 40) # canny边缘检测
cv2.imshow('canny', np.hstack((img, edges)))
cv2.waitKey(0)效果:

?关于边缘检测函数 cv2.Canny()
edge = CV2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])?
参数2、3表示最低、高阈值,参数3用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
????????可选参数中apertureSize就是Sobel算子的大小。而L2gradient参数是一个布尔值,如果为真,则使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开放),否则使用L1范数(直接将两个方向导数的绝对值相加)。?
