问题概览
近期使用OpenCV的库函数findCirclesGrid()做圆点标定中的特征点提取时,发现对于部分存在较大透视畸变的标定图片,findCirclesGrid()可能会出现提取不到圆点的情况
函数定义
bool cv::findCirclesGrid ( InputArray image,
Size patternSize,
OutputArray centers,
int flags = CALIB_CB_SYMMETRIC_GRID,
const Ptr< FeatureDetector > & blobDetector = SimpleBlobDetector::create()
)
- image:输入图像(格式:cv::Mat)
- patternSize:特征点的横纵向数量(格式:cv::Size)
- centers:输出提取到的特征点像素坐标集合(格式:vector< vector< cv::Point2f > >)
- flags :(默认缺省)标识符,标识所采用的图案类型(对称圆点
CALIB_CB_SYMMETRIC_GRIDor 非对称圆点CALIB_CB_ASYMMETRIC_GRID)以及相关的算法参数 - blobDetector :(默认缺省)用于圆检测的BLOB算子
问题排查
由于只有部分标定图片无法被提取到特征点,故怀疑是提取点时候的算法鲁棒性较差导致,通过查阅资料,在OpenCV的相关书籍中有这么一段话
flags的选项中有一个是
CALIB_CB_CLUSTERING,可以使用or逻辑符与图案标识符一起设置,此时函数会以稍微不同的算法来寻找圆圈,这个替代算法对透视畸变具有较高的鲁棒性,但对背景的干扰也更加敏感,适合标定具有非常宽视野的相机。
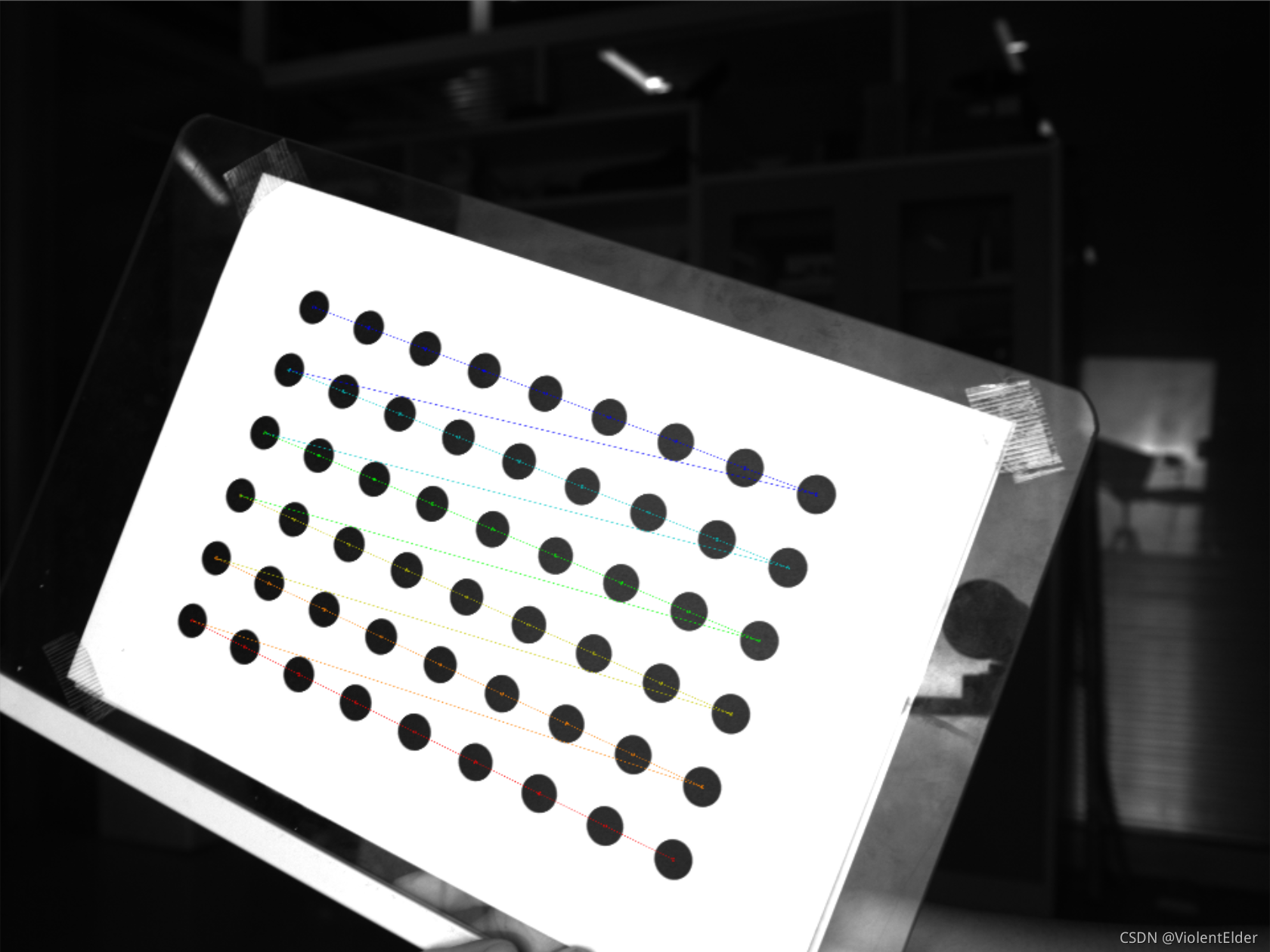
修改函数后,可以提取到正确的圆心
测试代码
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main() {
// Blob算子参数
SimpleBlobDetector::Params params;
/*params.minThreshold = 10;
params.maxThreshold = 200;*/
params.maxArea = 10e4;
params.minArea = 10;
params.filterByArea = true;
/*params.minDistBetweenBlobs = 5;
params.filterByInertia = false;
params.minInertiaRatio = 0.5;*/
Ptr<FeatureDetector> blobDetector = SimpleBlobDetector::create(params);
Mat img = imread("right01_circulars.jpg", 0);
vector<Point2f> centers;
Size patternSize(9, 6);
// 提取圆点特征的圆心
// 无法提取到圆心
//bool found = findCirclesGrid(img, patternSize, centers, CALIB_CB_SYMMETRIC_GRID, blobDetector);
bool found = findCirclesGrid(img, patternSize, centers, CALIB_CB_SYMMETRIC_GRID | CALIB_CB_CLUSTERING, blobDetector);
Mat cimg;
cvtColor(img, cimg, COLOR_GRAY2BGR);
drawChessboardCorners(cimg, patternSize, centers, found);
double sf = 960. / MAX(img.rows, img.cols);
resize(img, img, Size(), sf, sf, INTER_LINEAR_EXACT);
resize(cimg, cimg, Size(), sf, sf, INTER_LINEAR_EXACT);
imshow("原始图像", img);
imshow("corners", cimg);
waitKey();
return 0;
}
效果图
参考引用
- 凯勒, 布拉德斯基, 刘昌祥, 吴雨培, and 王成龙. 学习OpenCV 3 中文版. 北京: 清华大学出版社, 2018.