需求: 给一张小图查找其在大图中的位置
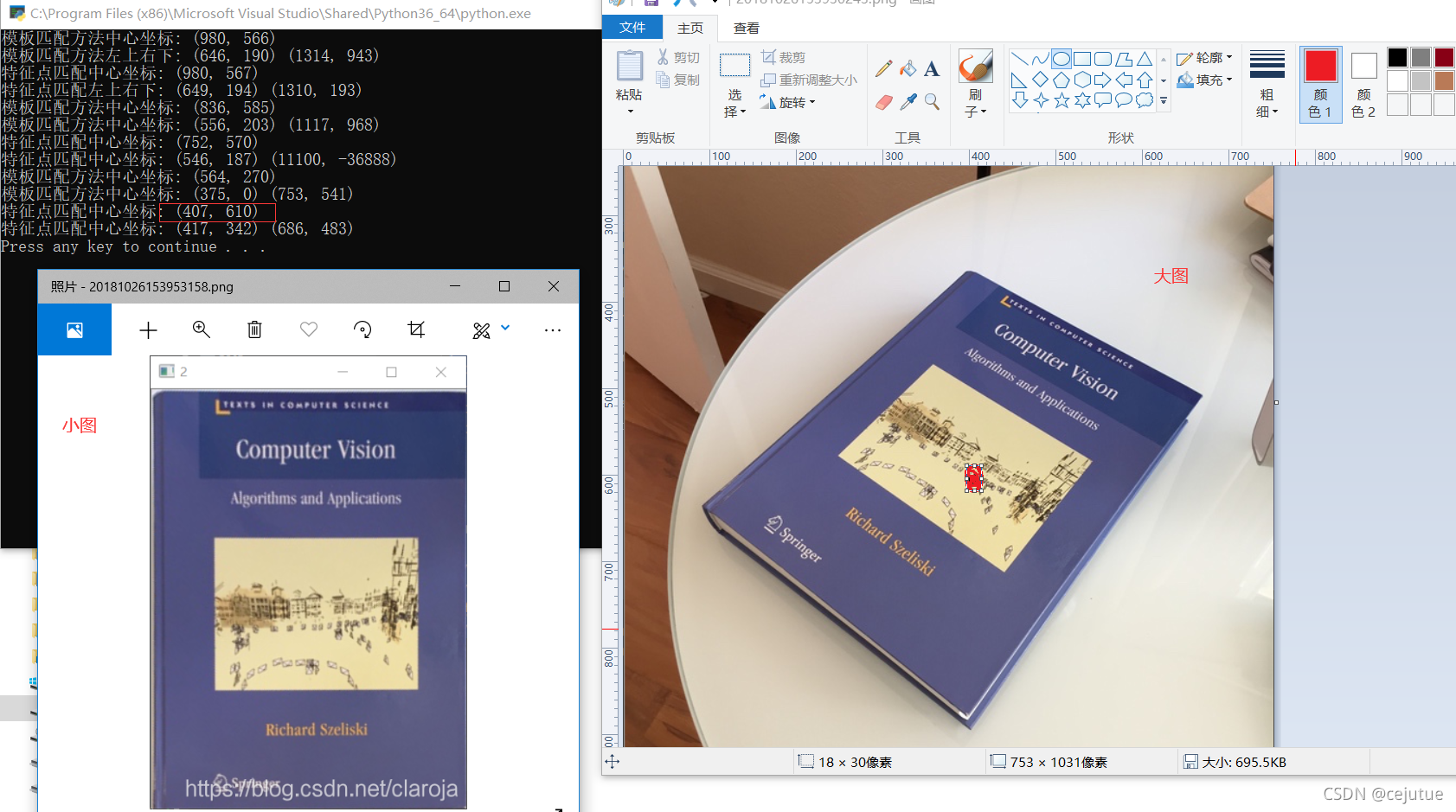
看效果图:
一本书(正射), 和一本桌上的数(书做了仿射变换了) 使用aircv的模板匹配式无法达到效果, 但是使用特征匹配至少可以找到左上和中心点基本正确, [右下有偏差]
?
另外aircv其中有个函数基本无法通过, 最终将aircv代码中以下修改:
 改成:
改成:

完整得py脚本如下:
?
# Name: contain_image.py
# Description: small image is in big image
# Author: CHIJING 20210909
# -*- coding: utf-8 -*-
import numpy as np
import pyautogui
import cv2
import aircv as ac
#import opencv-python
#import opencvpyxl
# 可以通过图片,在屏幕上定位图像所在的位置
# 找到返回的是一个4边距元组 (top, left, width, height),没有找到返回None
# 全屏幕搜素
def _sift_instance(edge_threshold=100):
if hasattr(cv2, 'SIFT'):
return cv2.SIFT_create(edgeThreshold=edge_threshold)
return cv2.xfeatures2d.SIFT_create(edgeThreshold=edge_threshold)
def sift_count(img):
sift = _sift_instance()
kp, des = sift.detectAndCompute(img, None)
return len(kp)
FLANN_INDEX_KDTREE = 0
def find_all_sift(im_source, im_search, min_match_count=4, maxcnt=0):
'''
使用sift算法进行多个相同元素的查找
Args:
im_source(string): 图像、素材
im_search(string): 需要查找的图片
threshold: 阈值,当相识度小于该阈值的时候,就忽略掉
maxcnt: 限制匹配的数量
Returns:
A tuple of found [(point, rectangle), ...]
A tuple of found [{"point": point, "rectangle": rectangle, "confidence": 0.76}, ...]
rectangle is a 4 points list
'''
sift = _sift_instance()
flann = cv2.FlannBasedMatcher({'algorithm': FLANN_INDEX_KDTREE, 'trees': 5}, dict(checks=50))
kp_sch, des_sch = sift.detectAndCompute(im_search, None)
if len(kp_sch) < min_match_count:
return None
kp_src, des_src = sift.detectAndCompute(im_source, None)
if len(kp_src) < min_match_count:
return None
h, w = im_search.shape[1:]
result = []
while True:
# 匹配两个图片中的特征点,k=2表示每个特征点取2个最匹配的点
matches = flann.knnMatch(des_sch, des_src, k=2)
good = []
for m, n in matches:
# 剔除掉跟第二匹配太接近的特征点
if m.distance < 0.9 * n.distance:
good.append(m)
if len(good) < min_match_count:
break
sch_pts = np.float32([kp_sch[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
img_pts = np.float32([kp_src[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
# M是转化矩阵
M, mask = cv2.findHomography(sch_pts, img_pts, cv2.RANSAC, 5.0)
matches_mask = mask.ravel().tolist()
# 计算四个角矩阵变换后的坐标,也就是在大图中的坐标
h, w = im_search.shape[:2]
pts = np.float32([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
# trans numpy arrary to python list
# [(a, b), (a1, b1), ...]
pypts = []
for npt in dst.astype(int).tolist():
pypts.append(tuple(npt[0]))
lt, br = pypts[0], pypts[2]
middle_point = (lt[0] + br[0]) / 2, (lt[1] + br[1]) / 2
result.append(dict(
result=middle_point,
rectangle=pypts,
confidence=(matches_mask.count(1), len(good)) #min(1.0 * matches_mask.count(1) / 10, 1.0)
))
if maxcnt and len(result) >= maxcnt:
break
# 从特征点中删掉那些已经匹配过的, 用于寻找多个目标
qindexes, tindexes = [], []
for m in good:
qindexes.append(m.queryIdx) # need to remove from kp_sch
tindexes.append(m.trainIdx) # need to remove from kp_img
def filter_index(indexes, arr):
r = np.ndarray(0, np.float32)
for i, item in enumerate(arr):
if i not in qindexes:
r = np.append(r, item)
return r
kp_src = filter_index(tindexes, kp_src)
des_src = filter_index(tindexes, des_src)
return result
pass
#
filename_result1 = 'D:\\pycode\\图像识别\\图片\\A组\\assert_ZhiTuShiTu.png'
filename_screen1 = 'D:\\pycode\\图像识别\\图片\\A组\\2021-09-09_11_29_42assert.jpg'
filename_result1 = 'D:\\pycode\\assert_ZhiTuShiTu.png'
filename_screen1 = 'D:\\pycode\\2021-09-09_11_29_42assert.jpg'
filename_result2 = 'D:\\pycode\\at_inters_Point_Point.png'
filename_screen2 = 'D:\\pycode\\2021-09-09_11_36_08assert.jpg'
filename_result3 = 'D:\\pycode\\20181026153953158.png'
filename_screen3 = 'D:\\pycode\\20181026153930243.png'
20181026153930243
#找小图在大图中的位置,
def SearchsmallInBigPosition(filename_big, filename_small):
im_result = cv2.imdecode(np.fromfile(filename_small,dtype=np.uint8),-1)
im_screen = cv2.imdecode(np.fromfile(filename_big,dtype=np.uint8),-1)
#smallimg = cv2.resize(im_result,(100,100))
#由于png和jpg格式有差异这里rgb设True会更准确
pos = ac.find_template(im_screen , im_result , rgb=True, bgremove=True)
#p2 = ac.find_sift( im_result,im_screen )
if not pos:
print('未找到')
return None, None, None
top_left = pos['rectangle'][0] # 左上
right_bottom = pos['rectangle'][3] # 右下
circle_center_pos = pos['result'] # 中心点坐标
circle_center_pos = tuple(map(int, circle_center_pos))
#print('准确率:', pos['confidence'])
#print('中心坐标:',circle_center_pos)
#print('左上右下:',top_left, right_bottom)
return circle_center_pos,top_left,right_bottom
pass
def SearchsmallInBigPositionBySIFT(filename_big, filename_small):
im_result = cv2.imdecode(np.fromfile(filename_small,dtype=np.uint8),-1)
im_screen = cv2.imdecode(np.fromfile(filename_big,dtype=np.uint8),-1)
pos = find_all_sift(im_screen,im_result,4,1 )
#im_result_gray = cv2.cvtColor( im_result, cv2.COLOR_RGB2GRAY )
#im_screen_gray = cv2.cvtColor( im_screen, cv2.COLOR_RGB2GRAY )
#pos = find_all_sift(im_screen_gray,im_result_gray,4,1 )
if not pos:
print('未找到')
return None, None, None
top_left = pos[0]['rectangle'][0] # 左上
right_bottom = pos[0]['rectangle'][3] # 右下
circle_center_pos = pos[0]['result'] # 中心点坐标
circle_center_pos = tuple(map(int, circle_center_pos))
#print('准确率:', pos['confidence'])
#print('中心坐标:',circle_center_pos)
#print('左上右下:',top_left, right_bottom)
return circle_center_pos,top_left,right_bottom
def main():
circle_center_pos,top_left,right_bottom = SearchsmallInBigPosition(filename_screen1, filename_result1)
print('模板匹配方法中心坐标:',circle_center_pos)
print('模板匹配方法左上右下:',top_left, right_bottom)
circle_center_pos,top_left,right_bottom = SearchsmallInBigPositionBySIFT(filename_screen1, filename_result1)
print('特征点匹配中心坐标:',circle_center_pos)
print('特征点匹配左上右下:',top_left, right_bottom)
circle_center_pos,top_left,right_bottom = SearchsmallInBigPosition(filename_screen2, filename_result2)
print('模板匹配方法中心坐标:',circle_center_pos)
print('模板匹配方法左上右下:',top_left, right_bottom)
circle_center_pos,top_left,right_bottom = SearchsmallInBigPositionBySIFT(filename_screen2, filename_result2)
print('特征点匹配中心坐标:',circle_center_pos)
print('特征点匹配左上右下:',top_left, right_bottom)
circle_center_pos,top_left,right_bottom = SearchsmallInBigPosition(filename_screen3, filename_result3)
print('模板匹配方法中心坐标:',circle_center_pos)
print('特征点匹配左上右下:',top_left, right_bottom)
circle_center_pos,top_left,right_bottom = SearchsmallInBigPositionBySIFT(filename_screen3, filename_result3)
print('特征点匹配中心坐标:',circle_center_pos)
print('特征点匹配左上右下:',top_left, right_bottom)
pass
main()