目录
一、两类传感器
? ? ? ? 1、环境传感器:二维码、GPS、导轨、词条……
????????2、携带传感器:IMU、激光、相机……
? ? ? ? ? ? ? ? 相机以二维方式记录三维信息,丢弃了距离维度。
? ? ? ? ? ? ? ? ? ? ? ? 单目相机必须通过移动相机(近快远慢)产生深度;?
????????????????????????双目相机通过双目视差(计算量大)计算深度;
? ? ? ? ? ? ? ? ????????RGBD通过物理手段测量(量程小、干扰)深度,类似于激光;
二、视觉slam流程
? ? ? ? 1、slam问题的基本框架
????????????????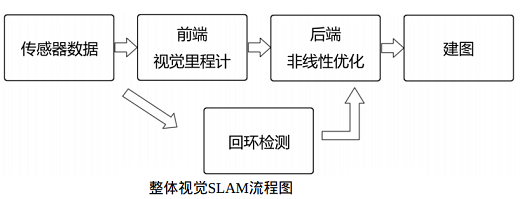
? ? ? ? ????????a、传感器数据:在视觉SLAM中主要为相机图像信息的读取和预处理。
? ? ? ? ????????b、视觉里程计(Visual Odometry,VO):又称为前端,视觉里程计的任务是估算相邻图像间相机的运动,计算运动和结构。视觉里程计不可避免地会出现累积漂移(Accumulating Drift)问题。
? ? ? ????????? c、后端优化 (Optimization):又称为后端,接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图信息。在视觉 SLAM中,前端和计算机视觉研究领域更为相关,比如图像的特征提取与匹配等,后端则主要是滤波与非线性优化算法。
? ? ? ? ????????d、回环检测 (Loop Closing):回环检测判断机器人是否到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
? ? ? ? ????????e、建图 (Mapping):它根据估计的轨迹建立与任务要求对应的地图。地图的形式包括度量地图(精确表示地图物体的位置关系)与拓扑地图(更强调地图元素之间的关系)两种;稀疏地图与稠密地图。
? ? ? ? 2、slam问题的数学描述
? ? ? ? ? ? ? ? 传感器在空间中运动时:
????????????????a、对于运动的描述(离散时间与位置
的函数关系)
? ? ? ? ? ? ? ? ? ? ? ? 运动方程:
????????????????????????:下一时刻位置
????????????????????????:上一时刻位置
??????????????????????????????????????:输入
??????????????????????????????????????:噪声
?????????????????b、对于观测的描述(传感器在位置处探测到路标
)
? ? ? ? ? ? ? ? ? ? ? ? 观测方程:
??????????????????????????????????????:传感器在在位置
处探测到路标
时产生的观测数据
??????????????????????????????????????:路标
??????????????????????????????????????:噪声
? ? ? ? ? ? ? ? c:slam即同步定位与建图,运动方程解决定位问题?观测方程解决建图问题?