源码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/visualization/pcl_visualizer.h>
boost::shared_ptr<pcl::visualization::PCLVisualizer> simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
//创建3D窗口并添加点云
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
return (viewer);
}
int main (int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// 填入点云数据
pcl::PCDReader reader;
// 把路径改为自己存放文件的路径
reader.read<pcl::PointXYZ> ("table_scene_lms400.pcd", *cloud);
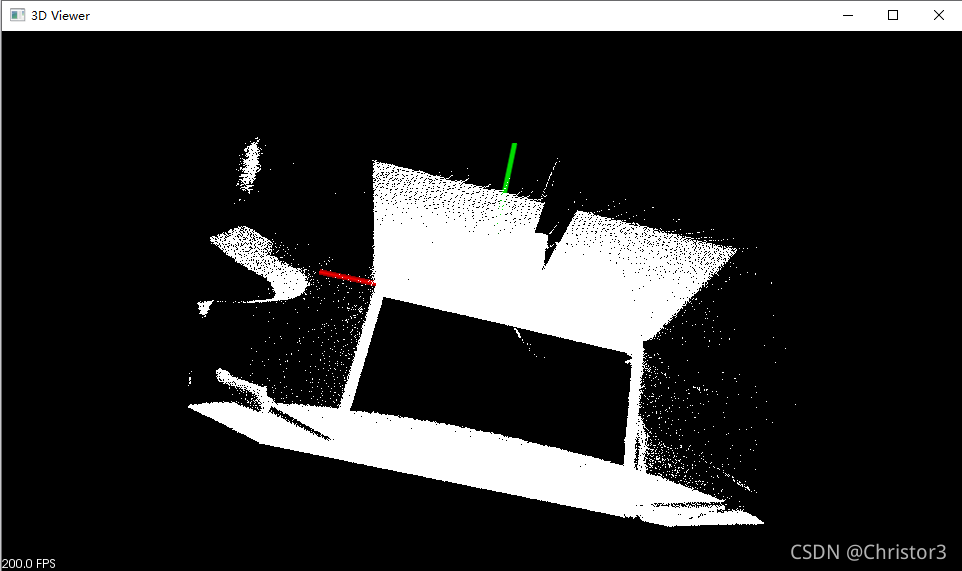
std::cerr << "Cloud before filtering: " << std::endl;
std::cerr << *cloud << std::endl;
//可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
viewer = simpleVis(cloud);
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
// 创建滤波器对象
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
sor.setInputCloud (cloud);
sor.setMeanK (50);
sor.setStddevMulThresh (1.0);
sor.filter (*cloud_filtered);
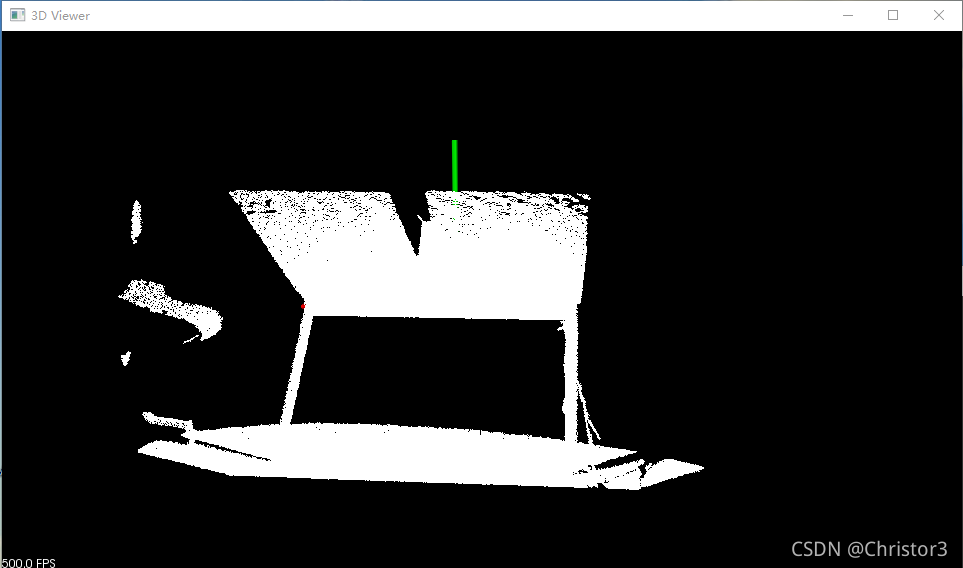
std::cerr << "Cloud after filtering: " << std::endl;
std::cerr << *cloud_filtered << std::endl;
//pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer1;
viewer1 = simpleVis(cloud_filtered);
while (!viewer1->wasStopped())
{
viewer1->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ> ("table_scene_lms400_inliers.pcd", *cloud_filtered, false);
sor.setNegative (true);
sor.filter (*cloud_filtered);
writer.write<pcl::PointXYZ> ("table_scene_lms400_outliers.pcd", *cloud_filtered, false);
return (0);
}