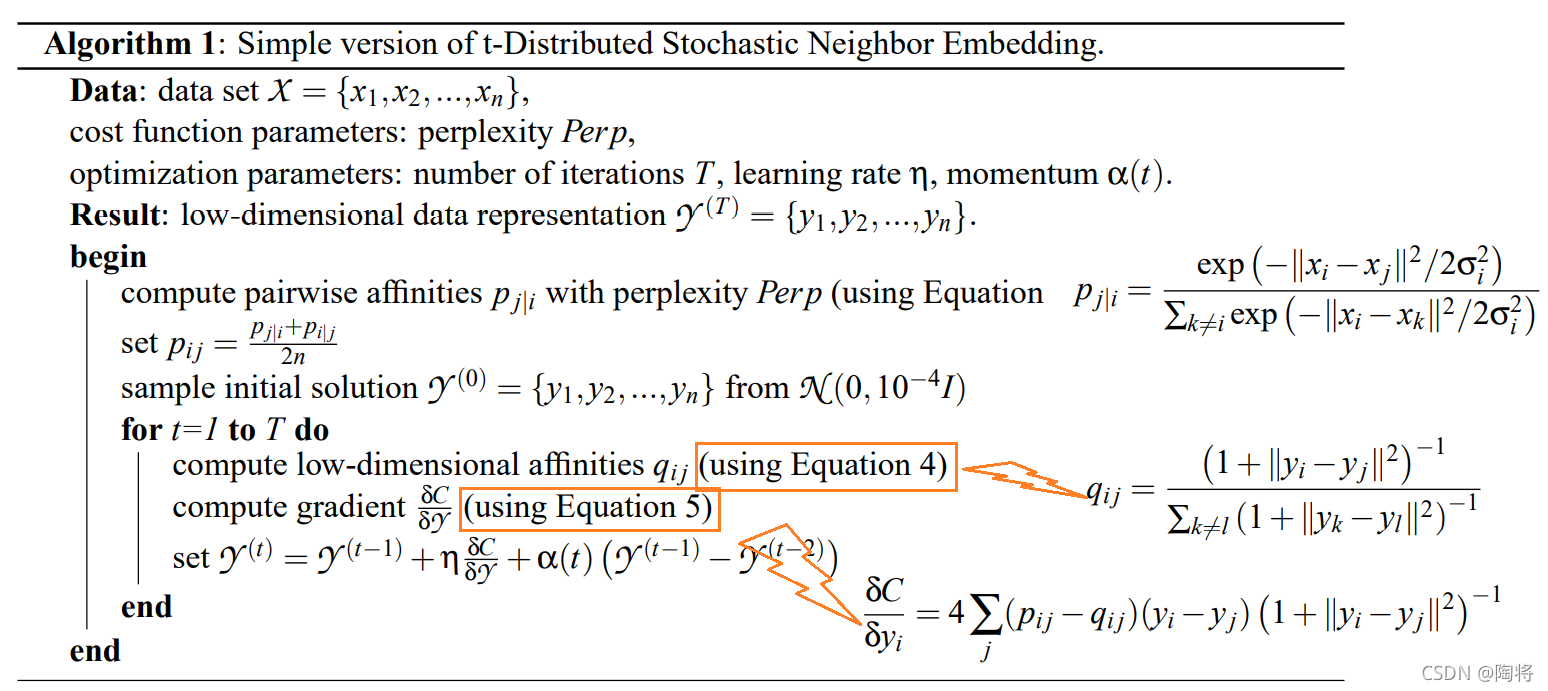
t-SNE
����Ŀ¼
t-SNE��һ�ֿ��ӻ���ά���ݵĹ��ߡ��������ݵ�֮���������ת��Ϊ���ϸ���,��������С����άǶ���ά���ݵ����ϸ���֮���Kullback-Leiblerɢ�ȡ�t-SNE��һ�����Ĵ��ۺ���,��ͨ����ͬ�ij�ʼ��,���ǿ��Եõ���ͬ�Ľ����
ԭ��
SNE(Stochastic Neighbor Embedding)
�������Ƕ��(SNE)���Ƚ����ݵ�֮��ĸ�άŷ����þ���ת��Ϊ��ʾ�����Ե��������ʡ����ݵ�
x
i
x_i
xi?ѡ�����ݵ�
x
j
x_j
xj?��Ϊ�ھӵ���������Ϊ
P
j
�O
i
P_{j|i}
Pj�Oi?���������
x
i
x_{i}
xi?Ϊ���ĵĸ�˹�ֲ���,���ո����ܶȵı���ѡ���ھ�,��������ĵ�,
P
j
�O
i
P_{j|i}
Pj�Oi?����ԱȽϸ�;���ڹ㷺��������ݵ�,
P
j
�O
i
P_{j|i}
Pj�Oi?��������
p
j
�O
i
p_{j|i}
pj�Oi?����ѧ��������:
p
j
�O
i
=
e
x
p
(
?
��
x
i
?
x
j
��
2
/
2
��
i
2
)
��
k
��
i
e
x
p
(
?
��
x
i
?
x
k
��
2
/
2
��
i
2
)
p_{j|i} = \frac{exp \left( - \left \| x_{i} - x_{j} \right \|^{2} / 2 \sigma_{i}^{2} \right)}{\sum_{k \neq i } exp \left( - \left \| x_{i} - x_{k} \right \|^{2} / 2 \sigma_{i}^{2} \right)}
pj�Oi?=��k��?=i?exp(?��xi??xk?��2/2��i2?)exp(?��xi??xj?��2/2��i2?)?
�� i \sigma_{i} ��i?�������ݵ� x i x_{i} xi?Ϊ���ĵķ����Ϊ���Ƕ�ģ�ͳɶ������Ը���Ȥ,���� p i �O i = 0 p_{i|i}=0 pi�Oi?=0��
��ά�ռ����ݵ�
x
i
x_i
xi?��
x
j
x_j
xj?����ά�ռ����Ӧ����
y
i
y_i
yi?��
y
j
y_{j}
yj?,Ҳ��Ҫ�������Ƶ���������
q
j
�O
i
q_{j|i}
qj�Oi?������Ӧ������������
q
j
�O
i
q_{j|i}
qj�Oi?�еĸ�˹����Ϊ
1
(
2
)
\frac{1}{\sqrt(2)}
(?2)1?,
q
j
�O
i
q_{j|i}
qj�Oi?��ʽ��ʾ����:
q
j
�O
i
=
e
x
p
(
?
��
y
i
?
y
j
��
2
)
��
k
��
i
e
x
p
(
?
��
y
i
?
y
k
��
2
)
q_{j|i} = \frac{exp\left( - \left \| y_{i} - y_{j} \right \| ^{2} \right)}{\sum_{k \neq i } exp\left( - \left \| y_{i} - y_{k} \right \| ^{2} \right)}
qj�Oi?=��k��?=i?exp(?��yi??yk?��2)exp(?��yi??yj?��2)?
ͬ����,���ǽ�����ģ�ͳɶ������Ը���Ȥ,����
q
i
�O
i
=
0
q_{i|i}=0
qi�Oi?=0��
������ݵ� y i y_i yi?�� y j y_{j} yj?�ܹ���ȷ��ģ���ά�ռ����ݵ� x i x_i xi?�� x j x_j xj?��������,��ô p j �O i = q j �O i p_{j|i}=q_{j|i} pj�Oi?=qj�Oi?���ܵ��˹۲����ʾ,SNE��Ŀ�����ҵ�һ�ֵ�ά���ݱ�ʾ��,����ȵؼ��� q j �O i q_{j|i} qj�Oi?�� P j �O i P_{j|i} Pj�Oi?֮��IJ�ƥ����Ϊ��ʵ����һĿ��,����KLɢ�ȼ��� p i j p_{ij} pij?�� q i j q_{ij} qij?�������ԡ�SNEʹ���ݶ��½�������С���������ݵ��ϵ�KLɢ��֮�͡���ʧ������������:
C = �� i �� j p j �O i l o g ?? p j �O i q j �O i = �� i K L ( P i �O �O Q i ) C = \sum_{i} \sum_{j} p_{j|i} log \; \frac{p_{j|i}}{q_{j|i}} = \sum_{i} KL \left( P_{i} || Q_{i}\right) C=i��?j��?pj�Oi?logqj�Oi?pj�Oi??=i��?KL(Pi?�O�OQi?)
Q i Q_{i} Qi?��ʾ�������ݵ� x i x_{i} xi?�������������ݵ��ϵ��������ʷֲ�; P i P_{i} Pi?��ʾӳ�����ݵ� y i y_{i} yi?�������������ݵ��ϵ��������ʷֲ���
����KLɢ���ǷǶԳƵ�,��˵�άӳ���гɶԾ����в�ͬ���͵�����Ȩ����ȡ��ر���,ʹ�ù㷺�����ӳ�������ʾ���������ݵ�ijɱ��ܴ�(����,ʹ��С�� q j �O i q_{j|i} qj�Oi?��ģ��� p j �O i p_{j|i} pj�Oi?),����ʹ�ø�����ӳ�������ʾ�㷺��������ݵ�ijɱ���С�����С�ɱ������������ Q Q Q�ֲ����˷�һЩ�������������仰˵,SNE�ɱ����������ڱ�����ͼ�����ݵľֲ��ṹ��
Ҫѡ��IJ������Ը�ά���ݵ� x i x_{i} xi?Ϊ���ĵķ��� �� i \sigma_{i} ��i?���������ݼ��е��������ݵ�,��������һ����һ�� �� i \sigma_{i} ��i?ֵ�����ŵ�,��Ϊ���ݵ��ܶȿ��ܻ��б仯�����ܼ�����,һ����С�� �� i \sigma_{i} ��i?ͨ����ϡ����������ʡ� �� i \sigma_{i} ��i?���κ��ض�ֵ�����������������ݵ��ϲ������ʷֲ� P i P_{i} Pi?���÷ֲ������� �� i \sigma_{i} ��i?�����Ӷ����ӡ�SNE�� �� i \sigma_{i} ��i?��ִֵ�ж���������,��ֵ����һ�� P i P_{i} Pi?,�� P i P_{i} Pi?�����û�ָ���Ĺ̶����Ӷȡ����Ӷȶ���Ϊ P e r p ( P i ) = 2 H ( P i ) Perp\left( P_{i} \right) = 2^{H\left( P_{i} \right)} Perp(Pi?)=2H(Pi?),���� H ( P i ) H\left( P_{i}\right) H(Pi?)�� P i P_{i} Pi?����ũ��,����Ϊ H ( P i ) = ? �� j p j �O i l o g 2 p j �O i H\left( P_{i}\right) = -\sum_{j}p_{j|i}log_{2}p_{j|i} H(Pi?)=?��j?pj�Oi?log2?pj�Oi?�����Ӷȿ��Խ���Ϊ��Ч��������ƽ��������SNE�����ܶԸ��Ӷȵı仯�൱�Ƚ�,����ֵ��5��50֮�䡣
��С���ɱ�����,ʹ���ݶ��½�����ִ�С��ݶ���һ������ʽ����:
��
C
��
y
i
=
2
��
j
(
y
i
?
y
j
)
(
p
i
j
?
q
i
j
+
p
j
i
?
q
j
i
)
\frac{\delta C}{\delta y_{i}} = 2 \sum_{j} \left( y_{i} - y_{j }\right) \left( p_{ij} - q_{ij} + p_{ji} - q_{ji} \right)
��yi?��C?=2j��?(yi??yj?)(pij??qij?+pji??qji?)
�������Ͻ�,�ݶȿ��Խ���Ϊӳ���
y
i
y_i
yi?����������ӳ���
y
j
y_{j}
yj?֮���һ�鵯�ɲ����ĺ��������е�������
y
i
?
y
j
y_{i} - y_{j}
yi??yj?�ķ���ʩ������
y
i
y_{i}
yi?��
y
j
y_{j}
yj?֮��ĵ����ų������ӳ���,��ȡ����ӳ���֮��ľ����Ƿ�̫С����̫�� ,�Ա�ʾ������ά���ݵ�֮��������ԡ�
y
i
y_{i}
yi?��
y
j
y_{j}
yj?֮�䵯��ʩ�ӵ������䳤�ȳ�����,Ҳ����նȳ�����,�����ݵ��ӳ���ijɶ�������
(
p
i
j
?
q
i
j
+
p
j
i
?
q
j
i
)
\left( p_{ij} - q_{ij} + p_{ji} - q_{ji} \right)
(pij??qij?+pji??qji?)��ƥ�䡣
�ݶ��½���ͨ������ԭ��Ϊ���ĵľ���С����ĸ���ͬ�Ը�˹�������ӳ�������ʼ����,ʹ��moneutum�Ż���
��
(
t
)
=
��
(
t
?
1
)
+
��
?
C
?
��
+
��
(
t
)
(
��
(
t
?
1
)
?
��
(
t
?
2
)
)
\Upsilon^{\left( t \right)} = \Upsilon^{\left( t - 1 \right)} + \eta \frac{\partial C }{\partial \Upsilon} + \alpha\left( t \right)\left( \Upsilon^{\left( t - 1 \right)} - \Upsilon^{\left( t - 2 \right)} \right)
��(t)=��(t?1)+��?��?C?+��(t)(��(t?1)?��(t?2))
����
��
(
t
)
\Upsilon^{\left( t \right)}
��(t)��ʾ��
t
t
t���Ľ�,
��
\eta
����ʾѧϰ��,
��
(
t
)
\alpha\left( t \right)
��(t)��ʾ��
t
t
t���Ķ�����
t-SNE
����SNE�����൱�õĿ��ӻ�Ч��,�����ܵ������Ż��ijɱ��������谭,���dz�֮Ϊ��ӵ�����⡱��t-SNE��SNE��ͬ�ĵط�����������:
- t-SNEʹ����SNE�ɱ������ĶԳư汾,���и����ݶȡ�
- �ڵ�ά�ռ���,t-SNEʹ��student-t�ֲ������Ǹ�˹�ֲ����������ԡ�
t-SNE ���õ�ά�ռ��е���β�ֲ�(a heavy-tailed distribution)������ӵ��������Ż����⡣
�Գ�SNE
��Ϊ��С����������
P
j
�O
i
P_{j|i}
Pj�Oi?��
q
j
�O
i
q_{j|i}
qj�Oi?֮���KLɢ��֮�͵��������,Ҳ������С���ڸ�ά�ռ��е�**���ϸ��ʷֲ�
P
P
P���ڵ�ά�ռ��е����ϸ��ʷֲ�
Q
Q
Q**֮��ĵ���KLɢ�ȡ�
C
=
K
L
(
P
�O
�O
Q
)
=
��
i
��
j
p
i
j
l
o
g
??
p
i
j
q
i
j
C = KL \left( P || Q \right) = \sum_{i} \sum_{j} p_{ij} log \; \frac{p_{ij}}{q_{ij}}
C=KL(P�O�OQ)=i��?j��?pij?logqij?pij??
ͬ��,���� p i i = 0 p_{ii}=0 pii?=0�� q i i = 0 q_{ii}=0 qii?=0,��Ϊ p i j = p j i p_{ij}=p_{ji} pij?=pji?�� q i j = q j i q_{ij}=q_{ji} qij?=qji?������,���ǽ��������͵�SNE�����Գ�SNE���ڵ�ά�ռ�ӳ�� q i j q_{ij} qij?��ʽ��������:
q
i
j
=
e
x
p
(
?
��
y
i
?
y
j
��
2
)
��
k
��
l
e
x
p
(
?
��
y
k
?
y
l
��
2
)
q_{ij} = \frac{exp\left( - \left \| y_{i} - y_{j} \right \| ^{2} \right)}{\sum_{k \neq l } exp \left( - \left \| y_{k} - y_{l} \right \| ^{2} \right)}
qij?=��k��?=l?exp(?��yk??yl?��2)exp(?��yi??yj?��2)?
��ά�ռ�ijɶ�������
p
i
j
p_{ij}
pij?��������:
p
i
j
=
e
x
p
(
?
��
x
i
?
x
j
��
2
/
2
��
2
)
��
k
��
l
e
x
p
(
?
��
x
k
?
x
l
��
2
/
2
��
2
)
p_{ij} = \frac{exp \left( - \left \| x_{i} - x_{j} \right \|^{2} / 2 \sigma^{2} \right)}{\sum_{k \neq l } exp \left( - \left \| x_{k} - x_{l} \right \|^{2} / 2 \sigma^{2} \right)}
pij?=��k��?=l?exp(?��xk??xl?��2/2��2)exp(?��xi??xj?��2/2��2)?
��һ����ά���ݵ� x i x_{i} xi?��һ���쳣���������⡣����������һ���쳣��, p i j p_{ij} pij?��ֵ�����е� j j j���С,��ô��άӳ��� y i y_{i} yi?�ϵ�λ�ý��Գɱ�����Ӱ����С�����,ӳ����λ�ò��ܺܺõ�������ӳ����λ��ȷ��������ͨ������ά�ռ��е����ϸ��� p i j p_{ij} pij?����Ϊ�ԳƵ���������������������⡣����,���� p i j = p j �O i + p i �O j 2 n p_{ij} = \frac{p_{j|i} + p_{i|j}}{2n} pij?=2npj�Oi?+pi�Oj??,�����ܹ���֤�����е����ݵ� x i x_{i} xi?��˵, �� j p i j > 1 2 n \sum_{j} p_{ij} > \frac{1}{2n} ��j?pij?>2n1?,ÿһ�����ݵ� x i x_{i} xi?�Գɱ������������ش�Ĺ��ס��ڵ�ά�ռ���,�Գ�SNE��ʹ�� q i j q_{ij} qij?���Գ�SNE������ŵ��������ݶȵļ���ʽ,�����ڿ��ټ��㡣�Գ�SNE�ݶȵĶ�������:
�� C �� y i = 4 �� j ( p i j ? q i j ) ( y i ? y j ) \frac{\delta C }{\delta y_{i}} = 4 \sum_{j} \left( p_{ij} - q_{ij} \right) \left( y_{i} - y_{j} \right) ��yi?��C?=4j��?(pij??qij?)(yi??yj?)
ӵ������
����һ��λ�ڶ�ά���������ϵ����ݵ�,����С�߶��Ͻ�������,����Ƕ���ڸ�ά�ռ��С������ڶ�ά��ͼ�кܺõ�ģ�����ݵ�֮���С�ɶԾ���,��ͨ�������ʾ��(�硰Swiss roll �����ݼ�)����ʾ�����ڼ���������ʮ������ά��,����Ƕ�뵽һ������ά�ȵĿռ��С���ά��ͼ�еijɶԾ��벻��ȷ��ģ��ʮά�����ϵ�֮��ľ���,ԭ���м���������,��ʮ��ά����,������11����Ⱦ�����ݵ�,�������ڶ�ά��ͼ����ʵ�ؽ�ģ��һ����ص������������ռ��гɶԾ���ķֲ��dz���ͬ�������ݵ� i i iΪ���ĵ���������� r m r^{m} rm����,���� r r r������İ뾶, m m m�������ά�������,������ݵ���ʮά�����Ͻ��ƾ��ȵطֲ��� i i i��Χ������,���dz����ڶ�ά��ͼ��ģ�� i i i���������ݵ�ľ���,���ǵõ�����**��ӵ�����⡱:������ɸ������ݵ���������,���������о������ݵ�Ķ�ά��ͼ����������**�����,����������ڵ�ͼ�Ͼ�ȷ��ģ��С����,����������ݵ� i i i�������еĵ�����ڶ�ά��ͼ�з��õ�̫Զ����SNE��,�����ݵ� i i i���ӵ�ÿ�������Զ�ĵ�ͼ��ĵ��ɽ���˲����dz�С������������Ȼ��Щ�������dz�С,������������������ͼ���ĵĵ㼷ѹ��һ��,�Ӷ���ֹ����Ȼ��Ⱥ֮���γɼ�϶��
Cook����(2007��)�����һ��ͨ�������е���������һ�����ij��������ӵ�������ij��ԡ�ͨ���������С��ϱ��� �� \rho ���ľ��ȱ���ģ�������������ų������,����������ͼ��֮��ľ����ж�Զ, q i j q_{ij} qij?��Զ������� 2 �� n ( n ? 1 ) \frac{2\rho}{n\left(n-1\right)} n(n?1)2��?(��Ϊ���ȵı����ֲ����� n ( n ? 1 ) 2 \frac{n\left( n - 1 \right)}{2} 2n(n?1)?��)�����,�����ڸ�ά�ռ�������Զ�����ݵ�, q i j q_{ij} qij?��ʼ�մ��� p i j p_{ij} pij?,�Ӷ����������ų⡣���ּ�������ΪUNI-SNE,������ͨ�����ڱ�SNE,��UNI-SNE�ɱ��������Ż��dz�������
��ƥ���β�����Բ�����ƥ���ά��
��Ȼ�Գ�SNE�ܹ�ƥ���ά�͵�ά�ռ������ݵ�Ե����ϸ���,���������ǵľ���,������һ�ֺ���Ȼ�ķ�������ӵ�����⡣�ڸ�ά�ռ�,����ʹ�ø�˹�ֲ�������ת���ɸ��ʡ��ڵ�ά�ռ���,���ǿ���ʹ�ñȸ�˹�ֲ��и���β�͵ĸ��ʷֲ���������ת���ɸ�������ʹ�ø�ά�ռ��е����о������ͨ���ڵ�ͼ�и���ľ�����ʵ�ؽ�ģ�����,�������˱�ʾ���в�ͬ���ݵ��ӳ�����ݵ�֮��IJ���Ҫ����������
��t-SNE��,����Ӧ�����ɶ�Ϊ1��student t-�ֲ���Ϊ�ڵ�άͼ�е���β�ֲ�,ʹ������ֲ�,���ϸ��� q i j q_{ij} qij?���¶���:
q i j = ( 1 + �� y i ? y j �� 2 ) ? 1 �� k �� l ( 1 + �� y k ? y l �� 2 ) ? 1 q_{ij} = \frac{\left( 1 + \left \| y_{i} - y_{j} \right \|^{2} \right)^{-1}}{\sum_{k \neq l}\left( 1 + \left \| y_{k} - y_{l} \right \|^{2} \right)^{-1}} qij?=��k��?=l?(1+��yk??yl?��2)?1(1+��yi??yj?��2)?1?
����ʹ�����ɶ�Ϊ1��student t-�ֲ�,����Ϊ�������ر�õ�����, ( 1 + �� y i ? y j �� 2 ) ? 1 \left( 1 + \left \| y_{i} - y_{j} \right \|^{2} \right)^{-1} (1+��yi??yj?��2)?1���ڵ�άͼ�д�ijɶԾ��� �� y i ? y j �� \left \| y_{i} - y_{j} \right \| ��yi??yj?��,�ӽ�ƽ�����ȶ���(inverse square law)��
����ѡ��Student t�ֲ���һ������������,�����˹�ֲ��������,��ΪStudent t�ֲ��Ǹ�˹�ֲ�������ϡ����㷽���������,��Student t�ֲ��¼������ܶ�Ҫ����Gaussian�ֲ��¿�ö�,��Ϊ�����漰ָ��,��ʹStudent t�ֲ��൱�ھ��в�ͬ�����Gaussian���������
�� P P P�ͻ���Student t�ֲ������ϸ��ʷֲ� Q Q Q��KLɢ�ȵ��ݶ�����:
�� C �� y i = 4 �� j ( p i j ? q i j ) ( y i ? y j ) ( 1 + �� y i ? y j �� 2 ) ? 1 \frac{\delta C }{\delta y_{i}} = 4 \sum_{j} \left( p_{ij} - q_{ij} \right) \left( y_{i} - y_{j} \right) \left( 1 + \left \| y_{i} - y_{j} \right \|^{2} \right)^{-1} ��yi?��C?=4j��?(pij??qij?)(yi??yj?)(1+��yi??yj?��2)?1
t-SNE�������ŵ�:
- ����,t-SNE�ݶ�ǿ���ų��ڵ�ά��ʾ����С�ijɶԾ��뽨ģ�IJ�ͬ���ݵ㡣
- �ڶ�,����t-SNE�ڲ�ͬ�����ݵ�֮��������ǿ����ų���,��Щ���ݵ���С�ijɶԾ��뽨ģ,����Щ�ų�����������
t-SNEǿ��(1)ͨ����ɶԾ���Բ�ͬ���ݵ���н�ģ,(2)ͨ��С�ɶԾ�����������ݵ���н�ģ���������,t-SNE�ڵ�ά��ͼ������Զ����,���Խ��������Ż����ڷ�������Ƶ�(��)���ص�һ��
sklearn.manifold.TSNE
class sklearn.manifold.TSNE(n_components=2, *, perplexity=30.0, early_exaggeration=12.0, learning_rate=200.0, n_iter=1000, n_iter_without_progress=300, min_grad_norm=1e-07, metric=��euclidean��, init=��random��, verbose=0, random_state=None, method=��barnes_hut��, angle=0.5, n_jobs=None, square_distances=��legacy��)
����
n_components: int, default=2 Ƕ��ռ��ά��
perplexity: float, default=30.0 perplexity����������ѧϰ�㷨�е���������йء���������ݼ�ͨ����Ҫ�����perplexity����5��50֮��ȡֵ,��ͬ��ֵ�ᵼ�²�ͬ�Ľ����
early_exaggeration: float, default=12.0 ����ԭʼ�ռ��е���Ȼ����Ƕ��ռ��еĽ��̶ܳ��Լ�����֮��Ŀռ��С�����ڽϴ��ֵ,��Ȼ��֮��Ŀռ���Ƕ��ռ��ϴ�ͬ��,���������ѡ���Ǻܹؼ�������ڳ�ʼ�Ż�������,�ɱ���������,���ڵĿ�����ӻ���ѧϰ�ʿ��ܹ��ߡ�
learning_rate: float, default=200.0 t-SNE��ѧϰ�ʵ�ȡֵ����ͨ����
[
10.0
,
1000.0
]
[10.0, 1000.0]
[10.0,1000.0]�����ѧϰ��̫��,���ݿ��ܿ�������һ����,�κε�������������ھӵľ��������ȡ����ѧϰ��̫��,���������ܻ����ܼ������б�ѹ��,ֻ�к��ٵ��쳣ֵ������ɱ�����Ƕ��ֲ���Сֵ,���ѧϰ�ʿ��ܻ�����������
n_iter: int, default=1000 �Ż������������,�������250
n_iter_without_progress: int, default=300 ��������ֹ�Ż�֮ǰû�н�չ������������,�ڵ�250�γ�ʼ����֮��ʹ�á���ע��,ÿ50�ε���ֻ���һ�ν���,���,��ֵ���������뵽��һ��50�ı�����
min_grad_norm: float, default=1e-7 ����ݶȷ���С�������ֵ,�Ż�������ֹͣ��
metric: str or callable, default=��euclidean�� ��������������ʵ��֮��ľ���ʱʹ�õĶ���������������ַ���,����������scipy.spatial.distance.pdistΪ�����������������ѡ��֮һ��������pairwise.PAIRWISE_DISTANCE_FUNCTIONS���г��Ķ�������������ǡ�Ԥ����ġ�,����X��һ�����������,���������һ���ɵ��ú���,����ÿ��ʵ��(��)�ϵ�����,����¼���ֵ���ɵ��ú���Ӧ�ô�X�л�ȡ����������Ϊ����,������һ��ָʾ����֮������ֵ��Ĭ��ֵΪ��ŷ����¡�,��������Ϊƽ��ŷ����¾��롣
init{��random��, ��pca��} or ndarray of shape (n_samples, n_components), default=��random�� Ƕ��ij�ʼ�������ܵ�ѡ���С����������pca������״Ϊ(n_samples, n_components)��numpy���顣PCA��ʼ����������Ԥ�������,ͨ���������ʼ����ȫ���ȶ���
verbose: int, default=0
andom_state: int, RandomState instance or None, default=None ȷ����������������ڶ����������֮�䴫�ݿ����ֽ����int����ע��,��ͬ�ij�ʼ�����ܻᵼ�´��ۺ����IJ�ͬ�ֲ���Сֵ��
method: str, default=��barnes_hut�� Ĭ�������,����Barnes-Hut���ݶȼ����㷨������O(NlogN)ʱ�������С�method='exact������O(N^2)ʱ��������,��������ȷ��������������Ҫ����3%ʱ,Ӧʹ�þ�ȷ�㷨��Ȼ��,��ȷ�ķ�������չ���������ʾ����
angle: float, default=0.5 ����method='barnes_hut����ʹ�á�����Barnes-Hut T-SNE���ٶȺ;���֮���trade-off��
n_jobs: int, default=None �����ھ������IJ�����ҵ������ metric=��precomputed�� ���� (metric=��euclidean�� and method=��exact��)ʱ,�ò���û��Ӱ�졣
square_distances: True or ��legacy��, default=��legacy�� TSNE�Ƿ�Ӧ������ֵƽ������legacy����ʾ����ֵ����metric=��euclidean��ʱ��ƽ����True��ʾ����ֵΪ���ж�����ƽ����
���ض��������
embedding_: array-like of shape (n_samples, n_components) ���Ƕ������
kl_divergence_: float �Ż����Kullback-Leiblerɢ��
n_iter_: int����ʱ����������
Methods
fit(X[y]) ��X����һ��Ƕ��ռ�
fit_transform(X[, y]) ��X����һ��Ƕ��ռ�ͷ���ת�����
get_params([deep]) ��ȡ�˹������IJ���
**set_params(params) ���ô˹������IJ���
����:
X ndarray of shape (n_samples, n_features) or (n_samples, n_samples)
���metric=��precomputed��,X������һ��ƽ�����������,��ÿ�а���һ��ʾ�������method=��exact��,X�����ǡ�csr��, 'csc����coo�����͵�ϡ��������method='barnes_hut����metric=��precomputed��, X������Ԥ�����ϡ��ͼ��
TSNE������ӻ��Ĵ���ʾ������:
from sklearn.manifold import TSNE
from matplotlib.pyplot import plt
X_tsne = TSNE(n_components=2, init='pca').fit_transform(X)
X_min, X_max = X_tsne.min(0), X_tsne.max(0)
X_norm = (X_tsne - x_min) / (x_max - x_min)
for i in range(X_norm.shape[0]):
plt.scatter(X_norm[i, 0], X_norm[i, 1])
��¼
Kullback-Leibler divergences
KLɢ�������������������ʷֲ�֮��������Ե�һ������ָ�ꡣKLɢ��,����Ϣ�����ݻ���������Ϣ������������Ϣ�IJ�ȷ����,��Խ��,��Ϣ��Խ������������� X X X, �� N N N��״̬,ÿ��״̬�ķ�������Ϊ p i , i = [ 1 , 2 , ? ? , N ] p_{i}, i = [1, 2, \cdots, N] pi?,i=[1,2,?,N],��ô��Ϣ�صĹ�ʽ����Ϊ: H ( X ) = ? �� i = 1 N p ( x i ) l o g ?? p ( x i ) H\left(X\right)=-\sum_{i=1}^{N}p\left( x_{i}\right)log \; p\left( x_{i}\right) H(X)=?��i=1N?p(xi?)logp(xi?)��
����Ϣ�صĻ�����,�����и���
q
q
q����
p
p
p, �����ʾ����
q
q
q����
p
p
p,֮������Ե�KLɢ��
D
K
L
(
p
�O
�O
q
)
D_{KL} \left( p || q \right)
DKL?(p�O�Oq)Ϊ:
D
K
L
(
p
�O
�O
q
)
=
��
i
=
1
N
p
(
x
i
)
?
(
l
o
g
??
p
(
x
i
)
?
l
o
g
??
q
(
x
i
)
)
=
��
i
=
1
N
p
(
x
i
)
?
l
o
g
??
p
(
x
i
)
l
o
g
??
q
(
x
i
)
????
\begin{matrix} D_{KL} \left( p || q \right) &= \sum_{i=1}^{N} p\left( x_{i}\right) \cdot \left( log \; p\left( x_{i}\right) - log \; q \left( x_{i}\right)\right) \\ &= \sum_{i=1}^{N} p\left( x_{i}\right) \cdot \frac{log \; p\left( x_{i}\right)}{log \; q \left( x_{i}\right)} \qquad \qquad \quad \; \; \end{matrix}
DKL?(p�O�Oq)?=��i=1N?p(xi?)?(logp(xi?)?logq(xi?))=��i=1N?p(xi?)?logq(xi?)logp(xi?)??
D K L ( p �O �O q ) D_{KL} \left( p || q \right) DKL?(p�O�Oq)ɢ��ֵԽС,��ʾ���� q q q���� p p p֮��Խ�ӽ���
t-distribution
�ڸ����ۺ�ͳ��ѧ��,t-�ֲ����ڸ���С���������Ƴ���̬�ֲ��ҷ���δ֪������ľ�ֵ��������巽����֪(���������㹻��ʱ),��Ӧ������̬�ֲ������������ֵ��
���� X X X���ӱ���̬�ֲ�, Y Y Y���� �� 2 ( n ) \chi^{2}\left( n \right) ��2(n)�ֲ�,��ô Z = X Y / n Z = \frac{X}{\sqrt{Y/n}} Z=Y/n?X?�ķֲ���Ϊ���ɶ�Ϊ n n n�� t t t�ֲ�,��Ϊ Z �� t ( n ) Z \sim t \left( n \right) Z��t(n)
�ֲ��ܶȺ���Ϊ:
F
Z
(
x
)
=
G
a
m
(
n
+
1
2
)
n
��
G
a
m
(
n
2
)
(
1
+
x
2
n
)
?
n
+
1
2
F_{Z}\left( x \right) = \frac{Gam\left( \frac{n+1}{2} \right)}{\sqrt{n \pi}Gam\left( \frac{n}{2} \right)}\left( 1 + \frac{x^{2}}{n}\right)^{-\frac{n+1}{2}}
FZ?(x)=n��?Gam(2n?)Gam(2n+1?)?(1+nx2?)?2n+1?
����GamΪ٤�꺯��$\Gamma \left( x \right) = \int_{0}^{\infty } t^{x-1} e ^{-t} dt $
t�ֲ�������̬�� n n n(���ɶ� d f df df)��С�й�,�����̬�ֲ��������,���ɶ� d f df dfԽС,t�ֲ�����Խƽ̹,�����м�Խ��,����˫��β���̵�Խ��;���ɶ� d f df dfԽ��,t�ֲ�����Խ�ӽ���̬�ֲ�����,�����ɶ� d f = �� df = \infty df=��ʱ,t�ֲ�����Ϊ����̬�ֲ����ߡ�

manifold learning(����ѧϰ)
����(manifold)�Ǽ����е�һ������,���Ǹ�ά�ռ��еļ��Ͻṹ,���ռ��еĵ㹹�ɵļ��ϡ�����,��ά�ռ��е�����,��ά�ռ��е�����ȵȡ���ά�ռ��е����߿��Կ�����ά�ռ��е�һά����,��ά�ռ��е�������Կ�����ά�ռ��еĶ�ά���Ρ� n n nά�ռ��е� m ( m < n ) m \left( m < n \right) m(m<n)ά���ξ��Ǿ��� m m mά������״��һ���Ӽ���
����ѧϰ���������ڸ�ά�ռ�ķֲ�λ��ijһ����ά��������,��������������������ݵķ�����������һ�� N N Nά�ռ��е����� M M M,�� M M M�� N N Nάŷ�Ͽռ��е�һ�����Ӽ� M ? R N M \subset \mathbb{R}^{N} M?RN,����ѧϰ��ά�㷨Ҫʵ�ֵ�ӳ��ά M �� R n M \rightarrow \mathbb{R}^{n} M��Rn,���� n < < N n < < N n<<N,���� N N Nά�ռ������� M M M�ϵĵ�ӳ��ά n n nά�ռ��еĵ㡣j��ά��Ӧ��Ҫ��֤ n n nά�ռ���ͬ���������ά�ռ������йصļ���Լ����
Swiss Roll
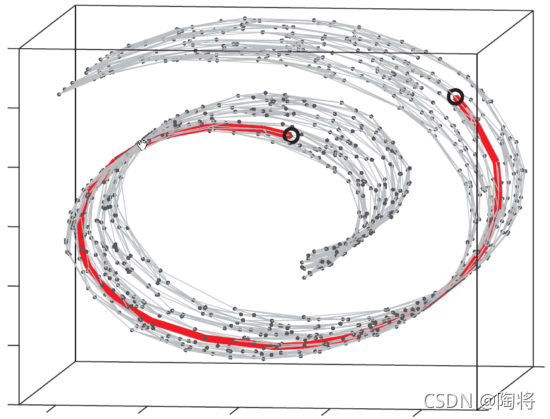
����ͼƬ��Swiss Roll��ͼ���������Ȧ�ĵ�,���ͨ����Χŷʽ�ռ��е�ŷʽ�������,������֮��ľ����С,��ʵ����,��������,��������ľ���dz�Զ��������ɫ���߾���������������ϵľ��롣