��������ǿ��ѧϰ��һƪ��Deep Q-learning
Q-learning �㷨
ǿ��ѧϰ����һ���������ɷ����Ϊ���ⱳ��,�����⽨ģΪ(
S
,
A
,
P
,
r
,
��
S,A,P,r,\gamma
S,A,P,r,��) ��ʽ,����
S
S
SΪ״̬�ռ�,
A
A
AΪ�����ռ�,
P
P
PΪ״̬ת�ƺ���,
r
r
rΪ���溯����agentͨ����ij��״̬ѡ��ij�������뻷�����н���,ʹ�û���������̬�ݱ�,agent���Ի�ȡ��Ӧ�����档ǿ��ѧϰ�����Ŀ������ҵ�һ�����ŵĶ�������
��
\pi
��,ʹ��agent�õ��������������
һ�ֺ���Ȼ���뷨����,�����ض���һ��״̬,�Ҹ���ÿһ������һ��ֵȥ��ʾ�ö����ļ�ֵ,��ô��״̬���ݵĹ�����,����ÿһ�ε�״̬�϶�ѡ���ֵ���Ķ���,��ô�����������ݹ���������õ���������ͻ����,��������value-base��ѧ��,��ѧ���Լ�ֵ����Ϊ�ؼ���,��Q��������ʾ״̬-������ֵ,��
Q
��
(
s
,
a
)
Q_\pi(s,a)
Q��?(s,a)��ʾ����
��
\pi
����״̬sʱ����a�ļ�ֵ��
��Ϊǿ��ѧϰ��Ŀ����������溯��,���������ɷ������һ����̬���ݹ���,��Ƶ�ʱ�������,������������ʽ������Ϊ���溯���ı�ʾ������������ʱ�䲽��Ϊ��,һ�ֱ�ʾ��ʽ��ƽ�����潱������,��
R
��
=
E
[
r
1
+
r
2
+
?
+
r
T
T
�O
��
]
R_\pi=E[\frac{r_1+r_2+\cdots+r_T}{T}|\pi]
R��?=E[Tr1?+r2?+?+rT??�O��],��һ���Ǵ����ۿ����ӵĽ�������,��
R
��
=
E
[
r
1
+
��
r
2
+
��
2
r
3
+
?
+
��
T
?
1
r
T
�O
��
]
R_\pi=E[r_1+\gamma r_2 + \gamma ^{2}r_3+\cdots+\gamma^{T-1}r_T|\pi]
R��?=E[r1?+��r2?+��2r3?+?+��T?1rT?�O��],�����ۿ����ӵĴ�������������,һ��Ϊ�˸��ӿ��ص�ǰ����,����δ���������Ҫ��,����Ϊ�˵�T���������ʱ,���溯�������������������ɷ���ƶ�̬����,���ȫ������ȼ������ÿһ��ʱ�̺������,���Զ�����ֵ��������Ϊ
Q
��
(
s
t
,
a
t
)
=
E
[
r
t
+
1
+
��
r
t
+
2
+
?
+
��
T
?
t
?
1
r
T
�O
��
]
Q_\pi(s_t,a_t)=E[r_{t+1}+\gamma r_{t+2}+\cdots+\gamma ^{T-t-1}r_{T}|\pi]
Q��?(st?,at?)=E[rt+1?+��rt+2?+?+��T?t?1rT?�O��]��
Q-learning��һ��model-free�ķ���,��̬�����ķ���ʹ��
Q
t
Q_t
Qt?��������
Q
?
Q^*
Q?,������ʽΪ
Q
t
+
1
(
s
t
,
a
t
)
=
Q
t
(
s
t
,
a
t
)
+
��
(
r
t
+
1
+
��
Q
t
(
s
t
+
1
,
a
t
+
1
)
?
Q
t
(
s
t
,
a
t
)
)
Q_{t+1}(s_t,a_t) = Q_t(s_t,a_t)+\alpha(r_{t+1}+\gamma Q_t(s_{t+1},a_{t+1})-Q_t(s_t,a_t))
Qt+1?(st?,at?)=Qt?(st?,at?)+��(rt+1?+��Qt?(st+1?,at+1?)?Qt?(st?,at?))
����
��
\alpha
��Ϊѧϰ�ʡ�
Q-learning�㷨���������ѱ�֤��������t�IJ�������,����
Q
t
(
s
t
,
a
t
)
Q_t(s_t,a_t)
Qt?(st?,at?)������������״̬-������ֵ����
Q
?
(
s
t
,
a
t
)
Q^*(s_t,a_t)
Q?(st?,at?)������
Q
?
(
s
t
,
a
t
)
=
m
a
x
��
Q
��
(
s
t
,
a
t
)
Q^*(s_t,a_t)=max_\pi Q_\pi(s_t,a_t)
Q?(st?,at?)=max��?Q��?(st?,at?)���㱴��������:
Q
?
(
s
t
,
a
t
)
=
E
[
r
t
+
1
+
��
Q
?
(
s
t
+
1
,
a
t
+
1
)
]
Q^*(s_t,a_t)=E[r_{t+1}+\sigma Q^*(s_{t+1},a_{t+1})]
Q?(st?,at?)=E[rt+1?+��Q?(st+1?,at+1?)]
Q
?
Q^*
Q?��Ӧ�����Ų��Լ�Ϊ
��
?
\pi^*
��?��
ͨ��ʹ��Q-learning�㷨�ķ����ǽ���һ��Q����,��״̬Ϊ������,�Զ���Ϊ������Q���������洢״̬-������ֵ,ÿһ�ε�����Ա����ڵ����ݽ��и���,Q-learning�㷨�ľ����Ա��ɴ˲���,��״̬�ռ�Ͷ����ռ�����Ӵ�ʱ,������ռ�ݵ��ڴ���ܴ�,���ұ���������Ҫ����ĸ��Ӷ�,���ÿһ��״̬�Ķ������ϲ�ͬ,��ô������Ҳ��洢�ܶ���Чֵ,����ڴ���˷ѡ����Q-learning�㷨��ܺõĽ��������⡣
Deep Q-learning�㷨
Deep Q-learning�㷨�����������״̬-������ֵ����,����ʵ�ֶ˶Զ˵�ѵ����
Deep Q-learnig��ӵ����������ṹ,һ��������ѵ����Ԥ������
Q
(
s
,
a
;
��
)
Q(s,a;\theta)
Q(s,a;��),һ�������������ʵֵ��Ŀ������
Q
(
s
,
a
;
��
^
)
Q(s,a;\hat{\theta})
Q(s,a;��^),����
L
(
��
)
=
E
[
(
r
t
+
1
+
��
Q
(
s
t
+
1
,
a
t
+
1
;
��
^
)
?
Q
(
s
t
,
a
t
)
)
2
]
L(\theta)=E[(r_{t+1}+\sigma Q(s_{t+1},a_{t+1};\hat{\theta}) - Q(s_t,a_t))^2]
L(��)=E[(rt+1?+��Q(st+1?,at+1?;��^)?Q(st?,at?))2]��Ϊ�Ż�������������з�������ѵ������ͼΪDQN����Ĵ���ṹ:
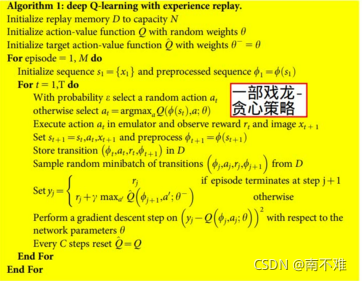
Deep Q-learning�������������µ�:
һ replay buffer����ʹ��һ��buffer�洢agent�뻷���Ľ�������,��ѵ��ʱ,�����buffer�в���,�������ŵ���:1.������������������� 2.���Ա�������֮���ǿ�����,��Ϊ���ѧϰ��ѵ��Ҫ���������Ƕ���ͬ�ֲ���,��ǿ��ѧϰ����������ǿ�ҵ�ʱ����,���Խ��������ݷ���buffer�н��д��Ҳ���,���Զ����������Ч��ѵ��
�� target network ����˵��DQN����������ܹ�:Ԥ�������Ŀ������,��Ϊ���ѧϰ��ѵ��Ҫ��label�ǹ̶������,������DQN��Ҫ��Ŀ������IJ��������ٶ�����Ԥ������,ͨ����ʮ��epoch�Ÿ���һ��target network,�����Ż�ʹ�������ѵ�������ȶ���