���˻������������ն���ѧ��ģ
1 ��������
���˻������ǻ��ڷ���ԭ��,�ڻ�е�ṹ���˶�������ģ���˵���Ϊ�ԴﵽԤ�����ܵĻ���װ������ͼ1.1��ʾ,һ���,���˻����˽ṹ�ɷ�Ϊ������,�����˶����Ȳ���Ҫ���Źؽڡ�ϥ�ؽڡ��ؽ����,����Ϊ��֫��
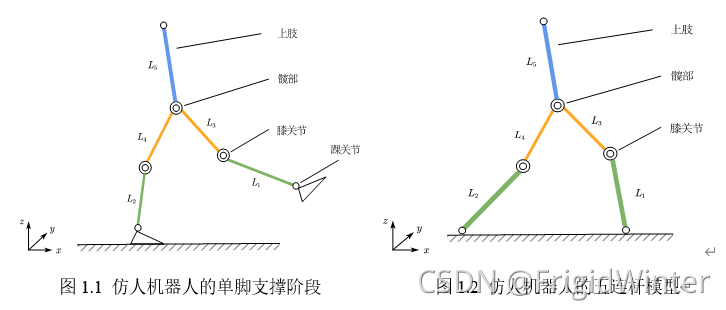
��������,�ڻ����������˶������з�Ϊ������:����֧�š������ײ��˫��֧�ŽΡ������˴��ڵ���֧�Ž�ʱ,�ڶ���ϥ�ؽڱ����ڶ�,���������ײ����˫��֧�Ž�֮ǰ,�ڶ��Ȼ��ֱ�Ը��õ�֧���������� [ 1 ] ^{[1]} [1]�����о�ָ�� [ 2 ] ^{[2]} [2],�Źؽڡ�ϥ�ؽ��ڻ��������ߡ��ܲ��ȳ����˶�����������֧����˫��֧�Ž�ռ��������λ;���ؽڵķ��������������в�����Ҫ,�����������������ײ˲�������������
���,���˻������˶�ϵͳģ�Ϳ��Է�Ϊ��������:
(1) ����֧����˫��֧�Ž�,��ʱ�������ؽ�����,�����˼�Ϊ������ģ��,��ͼ1.2��ʾ;
(2) �����ײ��,��ʱ�ؽ��ṩ�������������ɶȱ仯��
���˻����˵��ۺ�ģ�Ϳ���Ϊ������������ĵ���
[
3
]
^{[3]}
[3]��
2 ģ�ͼ���
2.1 ����֧����˫��֧�Ž�
��ʱ������Ϊ������ģ��,ת���ؽڱ����������ת�����ɶ� �� i ( i = 1 , 2 , 3 , 4 , 5 ) \theta _i\left( i=1,2,3,4,5 \right) ��i?(i=1,2,3,4,5),�ֱ�������������� �� i ( i = 1 , 2 , 3 , 4 , 5 ) \tau _i\left( i=1,2,3,4,5 \right) ��i?(i=1,2,3,4,5)���á����������ϵλ���Ų�,���Źؽ�λ�ò���ʱ,�����˵�λ����ȫ������������ɶȱ����������������˶������Ų�λ��ʱ,������ϵ��֮�ƶ�,��ʱ��Ҫ���������������ɶ����������ֱ仯,��������������ɶ��������Ų������ϡ���������,���˻������ڵ���֧�ź�˫��֧�Žι�7�����ɶȹ��ɹؽ�����:
�� = [ �� 1 �� 2 �� 3 �� 4 �� 5 x z ] T \boldsymbol{\theta }=\left[ \begin{matrix} \theta _1& \theta _2& \theta _3& \theta _4& \theta _5& x& z\\\end{matrix} \right] ^T ��=[��1??��2??��3??��4??��5??x?z?]T
5���������ع��ɿ�������:
�� = [ �� 1 �� 2 �� 3 �� 4 �� 5 ] T \boldsymbol{\tau }=\left[ \begin{matrix} \tau _1& \tau _2& \tau _3& \tau _4& \tau _5\\\end{matrix} \right] ^T ��=[��1??��2??��3??��4??��5??]T
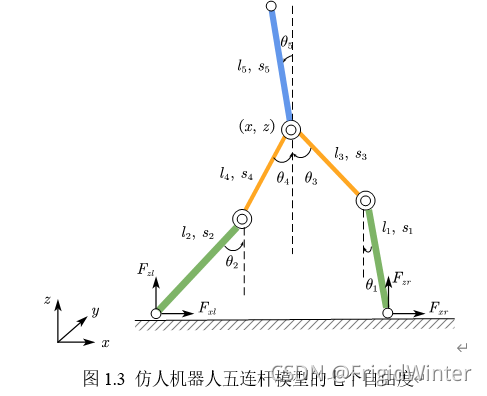
2.2 �����ײ��
�������˻����˶��嶯��ѧģ������Ҫ��һ��������������ź͵���ĽӴ��档һ���,��Ϊ�������Ƕ����ϵͳ,��һ�����նȺܴ�,��˻�������������Ϊ���ԽӴ��������ײ˲ʱ����,��Ϊ��ȫ�ǵ�����ײ,�Ӷ���ײǰ��,�����˽������ٶ�ͻ���û��λ�õ�ͻ��,����ײ��ڶ��Ȳ���������ͻ��ơ����о����õ��ɷ�����������������Ƶ����ϵͳ�ķ����� [ 4 ] ^{[4]} [4];���о�����Hertzģ������ʾ����Ӵ��� [ 5 ] ^{[5]} [5]���������Hertzģ��:
{ F l = [ F x l F z l ] = [ F x l K �O z l �O n + �� z �B l �O z l �O n ] F r = [ F x r F z r ] = [ F x r K �O z r �O n + �� z �B r �O z r �O n ] \begin{cases} \boldsymbol{F}_l=\left[ \begin{array}{c} F_{xl}\\ F_{zl}\\\end{array} \right] =\left[ \begin{array}{c} F_{xl}\\ K\left| z_l \right|^n+\lambda \dot{z}_l\left| z_l \right|^n\\\end{array} \right]\\ \boldsymbol{F}_r=\left[ \begin{array}{c} F_{xr}\\ F_{zr}\\\end{array} \right] =\left[ \begin{array}{c} F_{xr}\\ K\left| z_r \right|^n+\lambda \dot{z}_r\left| z_r \right|^n\\\end{array} \right]\\\end{cases} ????????Fl?=[Fxl?Fzl??]=[Fxl?K�Ozl?�On+��z�Bl?�Ozl?�On?]Fr?=[Fxr?Fzr??]=[Fxr?K�Ozr?�On+��z�Br?�Ozr?�On?]?
���� K K KΪ����ն�ϵ��, �� \lambda ��Ϊ����ϵ��, n n nΪ����ϵ��, ( x l , z l ) (x_l, z_l) (xl?,zl?)�� ( x r , z r ) (x_r, z_r) (xr?,zr?)�ֱ�Ϊ������Ŀռ�����,���ڹؽ����� ,����ײʱ��Լ����ӳ��ΪԼ����������(���ƶ����ɶȶ���Ϊ��):
{ �� l = C l F l �� r = C r F r \begin{cases} \boldsymbol{\tau }_l=\boldsymbol{C}_l\boldsymbol{F}_l\\ \boldsymbol{\tau }_r=\boldsymbol{C}_r\boldsymbol{F}_r\\\end{cases} {��l?=Cl?Fl?��r?=Cr?Fr??
3 ģ�ͽ���
�����������շ�����������ѧģ��,�г�������������������:
{ x �� 1 = x + l 3 sin ? �� 3 + s 1 sin ? �� 1 x �� 2 = x ? l 4 sin ? �� 4 ? s 2 sin ? �� 2 x �� 3 = x + s 3 sin ? �� 3 x �� 4 = x ? s 4 sin ? �� 4 x �� 5 = x ? s 5 sin ? �� 5 ?? { z �� 1 = z ? l 3 cos ? �� 3 ? s 1 cos ? �� 1 z �� 2 = z ? l 4 cos ? �� 4 ? s 2 cos ? �� 2 z �� 3 = z ? s 3 cos ? �� 3 z �� 4 = z ? s 4 cos ? �� 4 z �� 5 = z + s 5 cos ? �� 5 \begin{cases} \bar{x}_1=x+l_3\sin \theta _3+s_1\sin \theta _1\\ \bar{x}_2=x-l_4\sin \theta _4-s_2\sin \theta _2\\ \bar{x}_3=x+s_3\sin \theta _3\\ \bar{x}_4=x-s_4\sin \theta _4\\ \bar{x}_5=x-s_5\sin \theta _5\\\end{cases}\,\, \begin{cases} \bar{z}_1=z-l_3\cos \theta _3-s_1\cos \theta _1\\ \bar{z}_2=z-l_4\cos \theta _4-s_2\cos \theta _2\\ \bar{z}_3=z-s_3\cos \theta _3\\ \bar{z}_4=z-s_4\cos \theta _4\\ \bar{z}_5=z+s_5\cos \theta _5\\\end{cases} ????????????????x��1?=x+l3?sin��3?+s1?sin��1?x��2?=x?l4?sin��4??s2?sin��2?x��3?=x+s3?sin��3?x��4?=x?s4?sin��4?x��5?=x?s5?sin��5??????????????????z��1?=z?l3?cos��3??s1?cos��1?z��2?=z?l4?cos��4??s2?cos��2?z��3?=z?s3?cos��3?z��4?=z?s4?cos��4?z��5?=z+s5?cos��5??
����
s
i
(
i
=
1
,
2
,
3
,
4
,
5
)
s_i\left( i=1,2,3,4,5 \right)
si?(i=1,2,3,4,5)Ϊ��������λ�á�
���Ų�Ϊ�����ܵ�,��ϵͳ������Ϊ:
U = �� i = 1 5 m i g z �� i = ? m 1 g ( l 3 cos ? �� 3 + s 1 cos ? �� 1 ) ? m 2 g ( l 4 cos ? �� 4 + s 2 cos ? �� 2 ) ? m 3 g s 3 cos ? �� 3 ? m 4 g s 4 cos ? �� 4 + m 5 g s 5 cos ? �� 5 U=\sum_{i=1}^5{m_ig\bar{z}_i}\\=-m_1g\left( l_3\cos \theta _3+s_1\cos \theta _1 \right) -m_2g\left( l_4\cos \theta _4+s_2\cos \theta _2 \right) -m_3gs_3\cos \theta _3-m_4gs_4\cos \theta _4+m_5gs_5\cos \theta _5 U=i=1��5?mi?gz��i?=?m1?g(l3?cos��3?+s1?cos��1?)?m2?g(l4?cos��4?+s2?cos��2?)?m3?gs3?cos��3??m4?gs4?cos��4?+m5?gs5?cos��5?
��ϵͳ���˶��ֽܷ�Ϊƽ�����ܺ�ת������,���� K i = 1 2 m i ( x �� �B i 2 + z �� �B i 2 ) + 1 2 J i �� �B i 2 K_i=\frac{1}{2}m_i\left( \dot{\bar{x}}_{i}^{2}+\dot{\bar{z}}_{i}^{2} \right) +\frac{1}{2}J_i\dot{\theta}_{i}^{2} Ki?=21?mi?(x���Bi2?+z���Bi2?)+21?Ji?���Bi2?,���� J i J_i Ji?Ϊ�� i i i�����˵�ת������,�ɵ�:
{ K 1 = 1 2 m 1 [ x �B 2 + z �B 2 + 2 l 3 �� �B 3 x �B cos ? �� 3 + 2 s 1 �� �B 1 x �B cos ? �� 1 + 2 l 3 �� �B 3 z �B sin ? �� 3 + 2 s 1 �� �B 1 z �B sin ? �� 1 + 2 l 3 s 1 �� �B 1 �� �B 3 cos ? ( �� 1 ? �� 3 ) + l 3 2 �� �B 3 2 + s 1 2 �� �B 1 2 ] + 1 2 J 1 �� �B 1 2 K 2 = 1 2 m 2 [ x �B 2 + z �B 2 ? 2 l 4 �� �B 4 x �B cos ? �� 4 ? 2 s 2 �� �B 2 x �B cos ? �� 2 + 2 l 4 �� �B 4 z �B sin ? �� 4 + 2 s 2 �� �B 2 z �B sin ? �� 2 + 2 l 4 s 2 �� �B 2 �� �B 4 cos ? ( �� 2 ? �� 4 ) + l 4 2 �� �B 4 2 + s 2 2 �� �B 2 2 ] + 1 2 J 2 �� �B 2 2 K 3 = 1 2 m 3 [ x �B 2 + z �B 2 + 2 s 3 �� �B 3 x �B cos ? �� 3 + 2 s 3 �� �B 3 z �B sin ? �� 3 + s 3 2 �� �B 3 2 ] + 1 2 J 3 �� �B 3 2 K 4 = 1 2 m 4 [ x �B 2 + z �B 2 ? 2 s 4 �� �B 4 x �B cos ? �� 4 + 2 s 4 �� �B 4 z �B sin ? �� 4 + s 4 2 �� �B 4 2 ] + 1 2 J 4 �� �B 4 2 K 5 = 1 2 m 5 [ x �B 2 + z �B 2 ? 2 s 5 �� �B 5 x �B cos ? �� 5 ? 2 s 5 �� �B 5 z �B sin ? �� 5 + s 5 2 �� �B 5 2 ] + 1 2 J 5 �� �B 5 2 \begin{cases} K_1=\frac{1}{2}m_1\left[ \dot{x}^2+\dot{z}^2+2l_3\dot{\theta}_3\dot{x}\cos \theta _3+2s_1\dot{\theta}_1\dot{x}\cos \theta _1+2l_3\dot{\theta}_3\dot{z}\sin \theta _3+2s_1\dot{\theta}_1\dot{z}\sin \theta _1+2l_3s_1\dot{\theta}_1\dot{\theta}_3\cos \left( \theta _1-\theta _3 \right) +l_{3}^{2}\dot{\theta}_{3}^{2}+s_{1}^{2}\dot{\theta}_{1}^{2} \right] +\frac{1}{2}J_1\dot{\theta}_{1}^{2}\\ K_2=\frac{1}{2}m_2\left[ \dot{x}^2+\dot{z}^2-2l_4\dot{\theta}_4\dot{x}\cos \theta _4-2s_2\dot{\theta}_2\dot{x}\cos \theta _2+2l_4\dot{\theta}_4\dot{z}\sin \theta _4+2s_2\dot{\theta}_2\dot{z}\sin \theta _2+2l_4s_2\dot{\theta}_2\dot{\theta}_4\cos \left( \theta _2-\theta _4 \right) +l_{4}^{2}\dot{\theta}_{4}^{2}+s_{2}^{2}\dot{\theta}_{2}^{2} \right] +\frac{1}{2}J_2\dot{\theta}_{2}^{2}\\ K_3=\frac{1}{2}m_3\left[ \dot{x}^2+\dot{z}^2+2s_3\dot{\theta}_3\dot{x}\cos \theta _3+2s_3\dot{\theta}_3\dot{z}\sin \theta _3+s_{3}^{2}\dot{\theta}_{3}^{2} \right] +\frac{1}{2}J_3\dot{\theta}_{3}^{2}\\ K_4=\frac{1}{2}m_4\left[ \dot{x}^2+\dot{z}^2-2s_4\dot{\theta}_4\dot{x}\cos \theta _4+2s_4\dot{\theta}_4\dot{z}\sin \theta _4+s_{4}^{2}\dot{\theta}_{4}^{2} \right] +\frac{1}{2}J_4\dot{\theta}_{4}^{2}\\ K_5=\frac{1}{2}m_5\left[ \dot{x}^2+\dot{z}^2-2s_5\dot{\theta}_5\dot{x}\cos \theta _5-2s_5\dot{\theta}_5\dot{z}\sin \theta _5+s_{5}^{2}\dot{\theta}_{5}^{2} \right] +\frac{1}{2}J_5\dot{\theta}_{5}^{2}\\\end{cases} ??????????????????????K1?=21?m1?[x�B2+z�B2+2l3?���B3?x�Bcos��3?+2s1?���B1?x�Bcos��1?+2l3?���B3?z�Bsin��3?+2s1?���B1?z�Bsin��1?+2l3?s1?���B1?���B3?cos(��1??��3?)+l32?���B32?+s12?���B12?]+21?J1?���B12?K2?=21?m2?[x�B2+z�B2?2l4?���B4?x�Bcos��4??2s2?���B2?x�Bcos��2?+2l4?���B4?z�Bsin��4?+2s2?���B2?z�Bsin��2?+2l4?s2?���B2?���B4?cos(��2??��4?)+l42?���B42?+s22?���B22?]+21?J2?���B22?K3?=21?m3?[x�B2+z�B2+2s3?���B3?x�Bcos��3?+2s3?���B3?z�Bsin��3?+s32?���B32?]+21?J3?���B32?K4?=21?m4?[x�B2+z�B2?2s4?���B4?x�Bcos��4?+2s4?���B4?z�Bsin��4?+s42?���B42?]+21?J4?���B42?K5?=21?m5?[x�B2+z�B2?2s5?���B5?x�Bcos��5??2s5?���B5?z�Bsin��5?+s52?���B52?]+21?J5?���B52??
���������պ��� L = K ? U L=K-U L=K?U֪
{ d d t ( ? L ? �� �B 1 ) ? ? L ? �� 1 = ( m 1 s 1 2 + J 1 ) �� �� 1 + m 1 l 3 s 1 �� �� 3 cos ? ( �� 1 ? �� 3 ) + m 1 s 1 x �� cos ? �� 1 + m 1 s 1 z �� sin ? �� 1 + m 1 l 3 s 1 �� �B 3 2 sin ? ( �� 1 ? �� 3 ) d d t ( ? L ? �� �B 2 ) ? ? L ? �� 2 = ( m 2 s 2 2 + J 2 ) �� �� 2 + m 2 l 4 s 2 �� �� 4 cos ? ( �� 2 ? �� 4 ) ? m 2 s 2 x �� cos ? �� 2 + m 2 s 2 z �� sin ? �� 2 + m 2 l 4 s 2 �� �B 4 2 sin ? ( �� 2 ? �� 4 ) d d t ( ? L ? �� �B 3 ) ? ? L ? �� 3 = ( m 1 l 3 2 + m 3 s 3 2 + J 3 ) �� �� 3 + m 1 l 3 s 1 �� �� 1 cos ? ( �� 1 ? �� 3 ) + ( m 1 l 3 + m 3 s 3 ) x �� cos ? �� 3 + ( m 1 l 3 + m 3 s 3 ) z �� sin ? �� 3 ? m 1 l 3 s 1 �� �B 1 2 sin ? ( �� 1 ? �� 3 ) d d t ( ? L ? �� �B 4 ) ? ? L ? �� 4 = ( m 2 l 4 2 + m 4 s 4 2 + J 4 ) �� �� 4 + m 2 l 4 s 2 �� �� 2 cos ? ( �� 2 ? �� 4 ) ? ( m 2 l 4 + m 4 s 4 ) x �� cos ? �� 4 + ( m 2 l 4 + m 4 s 4 ) z �� sin ? �� 4 ? m 2 l 4 s 2 �� �B 2 2 sin ? ( �� 2 ? �� 4 ) d d t ( ? L ? �� �B 5 ) ? ? L ? �� 5 = ( m 5 s 5 2 + J 5 ) �� �� 5 ? m 5 s 5 x �� cos ? �� 5 ? m 5 s 5 z �� sin ? �� 5 d d t ( ? L ? x �B ) ? ? L ? x = ( m 1 + m 2 + m 3 + m 4 + m 5 ) x �� + m 1 s 1 �� �� 1 cos ? �� 1 ? m 2 s 2 �� �� 2 cos ? �� 2 + ( m 1 l 3 + m 3 s 3 ) �� �� 3 cos ? �� 3 ? ( m 2 l 4 + m 4 s 4 ) �� �� 4 cos ? �� 4 ?? ? m 5 s 5 �� �� 5 cos ? �� 5 ? m 1 s 1 �� �B 1 2 sin ? �� 1 + m 2 s 2 �� �B 2 2 sin ? �� 2 ? ( m 1 l 3 + m 3 s 3 ) �� �B 3 2 sin ? �� 3 + ( m 2 l 4 + m 4 s 4 ) �� �B 4 2 sin ? �� 4 + m 5 s 5 �� �B 5 2 sin ? �� 5 d d t ( ? L ? z �B ) ? ? L ? z = ( m 1 + m 2 + m 3 + m 4 + m 5 ) z �� + m 1 s 1 �� �� 1 sin ? �� 1 + m 2 s 2 �� �� 2 sin ? �� 2 + ( m 1 l 3 + m 3 s 3 ) �� �� 3 sin ? �� 3 + ( m 2 l 4 + m 4 s 4 ) �� �� 4 sin ? �� 4 ?? ? m 5 s 5 �� �� 5 sin ? �� 5 + m 1 s 1 �� �B 1 2 cos ? �� 1 + m 2 s 2 �� �B 2 2 cos ? �� 2 + ( m 1 l 3 + m 3 s 3 ) �� �B 3 2 cos ? �� 3 + ( m 2 l 4 + m 4 s 4 ) �� �B 4 2 cos ? �� 4 ? m 5 s 5 �� �B 5 2 sin ? �� 5 \begin{cases} \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{\theta}_1} \right) -\frac{\partial L}{\partial \theta _1}=\left( m_1s_{1}^{2}+J_1 \right) \ddot{\theta}_1+m_1l_3s_1\ddot{\theta}_3\cos \left( \theta _1-\theta _3 \right) +m_1s_1\ddot{x}\cos \theta _1+m_1s_1\ddot{z}\sin \theta _1+m_1l_3s_1\dot{\theta}_{3}^{2}\sin \left( \theta _1-\theta _3 \right)\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{\theta}_2} \right) -\frac{\partial L}{\partial \theta _2}=\left( m_2s_{2}^{2}+J_2 \right) \ddot{\theta}_2+m_2l_4s_2\ddot{\theta}_4\cos \left( \theta _2-\theta _4 \right) -m_2s_2\ddot{x}\cos \theta _2+m_2s_2\ddot{z}\sin \theta _2+m_2l_4s_2\dot{\theta}_{4}^{2}\sin \left( \theta _2-\theta _4 \right)\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{\theta}_3} \right) -\frac{\partial L}{\partial \theta _3}=\left( m_1l_{3}^{2}+m_3s_{3}^{2}+J_3 \right) \ddot{\theta}_3+m_1l_3s_1\ddot{\theta}_1\cos \left( \theta _1-\theta _3 \right) +\left( m_1l_3+m_3s_3 \right) \ddot{x}\cos \theta _3+\left( m_1l_3+m_3s_3 \right) \ddot{z}\sin \theta _3-m_1l_3s_1\dot{\theta}_{1}^{2}\sin \left( \theta _1-\theta _3 \right)\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{\theta}_4} \right) -\frac{\partial L}{\partial \theta _4}=\left( m_2l_{4}^{2}+m_4s_{4}^{2}+J_4 \right) \ddot{\theta}_4+m_2l_4s_2\ddot{\theta}_2\cos \left( \theta _2-\theta _4 \right) -\left( m_2l_4+m_4s_4 \right) \ddot{x}\cos \theta _4+\left( m_2l_4+m_4s_4 \right) \ddot{z}\sin \theta _4-m_2l_4s_2\dot{\theta}_{2}^{2}\sin \left( \theta _2-\theta _4 \right)\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{\theta}_5} \right) -\frac{\partial L}{\partial \theta _5}=\left( m_5s_{5}^{2}+J_5 \right) \ddot{\theta}_5-m_5s_5\ddot{x}\cos \theta _5-m_5s_5\ddot{z}\sin \theta _5\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{x}} \right) -\frac{\partial L}{\partial x}=\left( m_1+m_2+m_3+m_4+m_5 \right) \ddot{x}+m_1s_1\ddot{\theta}_1\cos \theta _1-m_2s_2\ddot{\theta}_2\cos \theta _2+\left( m_1l_3+m_3s_3 \right) \ddot{\theta}_3\cos \theta _3-\left( m_2l_4+m_4s_4 \right) \ddot{\theta}_4\cos \theta _4\\ \,\, -m_5s_5\ddot{\theta}_5\cos \theta _5-m_1s_1\dot{\theta}_{1}^{2}\sin \theta _1+m_2s_2\dot{\theta}_{2}^{2}\sin \theta _2-\left( m_1l_3+m_3s_3 \right) \dot{\theta}_{3}^{2}\sin \theta _3+\left( m_2l_4+m_4s_4 \right) \dot{\theta}_{4}^{2}\sin \theta _4+m_5s_5\dot{\theta}_{5}^{2}\sin \theta _5\\ \frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \dot{z}} \right) -\frac{\partial L}{\partial z}=\left( m_1+m_2+m_3+m_4+m_5 \right) \ddot{z}+m_1s_1\ddot{\theta}_1\sin \theta _1+m_2s_2\ddot{\theta}_2\sin \theta _2+\left( m_1l_3+m_3s_3 \right) \ddot{\theta}_3\sin \theta _3+\left( m_2l_4+m_4s_4 \right) \ddot{\theta}_4\sin \theta _4\\ \,\, -m_5s_5\ddot{\theta}_5\sin \theta _5+m_1s_1\dot{\theta}_{1}^{2}\cos \theta _1+m_2s_2\dot{\theta}_{2}^{2}\cos \theta _2+\left( m_1l_3+m_3s_3 \right) \dot{\theta}_{3}^{2}\cos \theta _3+\left( m_2l_4+m_4s_4 \right) \dot{\theta}_{4}^{2}\cos \theta _4-m_5s_5\dot{\theta}_{5}^{2}\sin \theta _5\\\end{cases} ????????????????????????????????????????dtd?(?���B1??L?)??��1??L?=(m1?s12?+J1?)����1?+m1?l3?s1?����3?cos(��1??��3?)+m1?s1?x��cos��1?+m1?s1?z��sin��1?+m1?l3?s1?���B32?sin(��1??��3?)dtd?(?���B2??L?)??��2??L?=(m2?s22?+J2?)����2?+m2?l4?s2?����4?cos(��2??��4?)?m2?s2?x��cos��2?+m2?s2?z��sin��2?+m2?l4?s2?���B42?sin(��2??��4?)dtd?(?���B3??L?)??��3??L?=(m1?l32?+m3?s32?+J3?)����3?+m1?l3?s1?����1?cos(��1??��3?)+(m1?l3?+m3?s3?)x��cos��3?+(m1?l3?+m3?s3?)z��sin��3??m1?l3?s1?���B12?sin(��1??��3?)dtd?(?���B4??L?)??��4??L?=(m2?l42?+m4?s42?+J4?)����4?+m2?l4?s2?����2?cos(��2??��4?)?(m2?l4?+m4?s4?)x��cos��4?+(m2?l4?+m4?s4?)z��sin��4??m2?l4?s2?���B22?sin(��2??��4?)dtd?(?���B5??L?)??��5??L?=(m5?s52?+J5?)����5??m5?s5?x��cos��5??m5?s5?z��sin��5?dtd?(?x�B?L?)??x?L?=(m1?+m2?+m3?+m4?+m5?)x��+m1?s1?����1?cos��1??m2?s2?����2?cos��2?+(m1?l3?+m3?s3?)����3?cos��3??(m2?l4?+m4?s4?)����4?cos��4??m5?s5?����5?cos��5??m1?s1?���B12?sin��1?+m2?s2?���B22?sin��2??(m1?l3?+m3?s3?)���B32?sin��3?+(m2?l4?+m4?s4?)���B42?sin��4?+m5?s5?���B52?sin��5?dtd?(?z�B?L?)??z?L?=(m1?+m2?+m3?+m4?+m5?)z��+m1?s1?����1?sin��1?+m2?s2?����2?sin��2?+(m1?l3?+m3?s3?)����3?sin��3?+(m2?l4?+m4?s4?)����4?sin��4??m5?s5?����5?sin��5?+m1?s1?���B12?cos��1?+m2?s2?���B22?cos��2?+(m1?l3?+m3?s3?)���B32?cos��3?+(m2?l4?+m4?s4?)���B42?cos��4??m5?s5?���B52?sin��5??
���������շ��� �� = d d t ( ? L ? �� �B ) ? ? L ? �� \boldsymbol{\tau }=\frac{\mathrm{d}}{\mathrm{d}t}\left( \frac{\partial L}{\partial \boldsymbol{\dot{\theta}}} \right) -\frac{\partial L}{\partial \boldsymbol{\theta }} ��=dtd?(?���B?L?)??��?L?��ϵڶ��ڵ�����,�ؽ����� ����Ϊ����֧�š�˫��֧�Ž��������ײ�εĵ���:
B �� + �� l + �� r = D 1 ( �� ) �� �� + D 2 ( �� ) �� �B 2 + D 4 ( �� ) \boldsymbol{B\tau }+\boldsymbol{\tau }_l+\boldsymbol{\tau }_r=\boldsymbol{D}_1\left( \boldsymbol{\theta } \right) \boldsymbol{\ddot{\theta}}+\boldsymbol{D}_2\left( \boldsymbol{\theta } \right) \boldsymbol{\dot{\theta}}^2+\boldsymbol{D}_4\left( \boldsymbol{\theta } \right) B��+��l?+��r?=D1?(��)����+D2?(��)���B2+D4?(��)
����
D 1 ( �� ) = [ m 1 s 1 2 + J 1 0 m 1 l 3 s 1 cos ? ( �� 1 ? �� 3 ) 0 0 m 1 s 1 cos ? �� 1 m 1 s 1 sin ? �� 1 m 2 s 2 2 + J 2 0 m 2 l 4 s 2 cos ? ( �� 2 ? �� 4 ) 0 ? m 2 s 2 cos ? �� 2 m 2 s 2 sin ? �� 2 ? m 1 l 3 2 + m 3 s 3 2 + J 3 0 0 ( m 1 l 3 + m 3 s 3 ) cos ? �� 3 ( m 1 l 3 + m 3 s 3 ) sin ? �� 3 m 2 l 4 2 + m 4 s 4 2 + J 4 0 ? ( m 2 l 4 + m 4 s 4 ) cos ? �� 4 ( m 2 l 4 + m 4 s 4 ) sin ? �� 4 ? ? m 5 s 5 2 + J 5 ? m 5 s 5 cos ? �� 5 ? m 5 s 5 sin ? �� 5 ? m 1 + m 2 + m 3 + m 4 + m 5 0 ? ? m 1 + m 2 + m 3 + m 4 + m 5 ] \boldsymbol{D}_1\left( \boldsymbol{\theta } \right) =\left[ \begin{matrix} m_1s_{1}^{2}+J_1& 0& m_1l_3s_1\cos \left( \theta _1-\theta _3 \right)& 0& 0& m_1s_1\cos \theta _1& m_1s_1\sin \theta _1\\ & m_2s_{2}^{2}+J_2& 0& m_2l_4s_2\cos \left( \theta _2-\theta _4 \right)& 0& -m_2s_2\cos \theta _2& m_2s_2\sin \theta _2\\ \vdots& & m_1l_{3}^{2}+m_3s_{3}^{2}+J_3& 0& 0& \left( m_1l_3+m_3s_3 \right) \cos \theta _3& \left( m_1l_3+m_3s_3 \right) \sin \theta _3\\ & & & m_2l_{4}^{2}+m_4s_{4}^{2}+J_4& 0& -\left( m_2l_4+m_4s_4 \right) \cos \theta _4& \left( m_2l_4+m_4s_4 \right) \sin \theta _4\\ \vdots& & \ddots& & m_5s_{5}^{2}+J_5& -m_5s_5\cos \theta _5& -m_5s_5\sin \theta _5\\ & \ddots& & & & m_1+m_2+m_3+m_4+m_5& 0\\ & & \cdots& & \cdots& & m_1+m_2+m_3+m_4+m_5\\\end{matrix} \right] D1?(��)=?????????????m1?s12?+J1????0m2?s22?+J2???m1?l3?s1?cos(��1??��3?)0m1?l32?+m3?s32?+J3????0m2?l4?s2?cos(��2??��4?)0m2?l42?+m4?s42?+J4??0000m5?s52?+J5???m1?s1?cos��1??m2?s2?cos��2?(m1?l3?+m3?s3?)cos��3??(m2?l4?+m4?s4?)cos��4??m5?s5?cos��5?m1?+m2?+m3?+m4?+m5??m1?s1?sin��1?m2?s2?sin��2?(m1?l3?+m3?s3?)sin��3?(m2?l4?+m4?s4?)sin��4??m5?s5?sin��5?0m1?+m2?+m3?+m4?+m5???????????????
D 2 ( �� ) = [ 0 0 m 1 l 3 s 1 sin ? ( �� 1 ? �� 3 ) 0 0 0 0 0 0 0 m 2 l 4 s 2 sin ? ( �� 2 ? �� 4 ) 0 0 0 ? m 1 l 3 s 1 sin ? ( �� 1 ? �� 3 ) 0 0 0 0 0 0 0 ? m 2 l 4 s 2 sin ? ( �� 2 ? �� 4 ) 0 0 0 0 0 0 0 0 0 0 0 0 ? m 1 s 1 sin ? �� 1 m 2 s 2 sin ? �� 2 ? ( m 1 l 3 + m 3 s 3 ) sin ? �� 3 ( m 2 l 4 + m 4 s 4 ) sin ? �� 4 m 5 s 5 sin ? �� 5 0 0 m 1 s 1 cos ? �� 1 m 2 s 2 cos ? �� 2 ( m 1 l 3 + m 3 s 3 ) cos ? �� 3 ( m 2 l 4 + m 4 s 4 ) cos ? �� 4 ? m 5 s 5 sin ? �� 5 0 0 ] \boldsymbol{D}_2\left( \boldsymbol{\theta } \right) =\left[ \begin{matrix} 0& 0& m_1l_3s_1\sin \left( \theta _1-\theta _3 \right)& 0& 0& 0& 0\\ 0& 0& 0& m_2l_4s_2\sin \left( \theta _2-\theta _4 \right)& 0& 0& 0\\ -m_1l_3s_1\sin \left( \theta _1-\theta _3 \right)& 0& 0& 0& 0& 0& 0\\ 0& -m_2l_4s_2\sin \left( \theta _2-\theta _4 \right)& 0& 0& 0& 0& 0\\ 0& 0& 0& 0& 0& 0& 0\\ -m_1s_1\sin \theta _1& m_2s_2\sin \theta _2& -\left( m_1l_3+m_3s_3 \right) \sin \theta _3& \left( m_2l_4+m_4s_4 \right) \sin \theta _4& m_5s_5\sin \theta _5& 0& 0\\ m_1s_1\cos \theta _1& m_2s_2\cos \theta _2& \left( m_1l_3+m_3s_3 \right) \cos \theta _3& \left( m_2l_4+m_4s_4 \right) \cos \theta _4& -m_5s_5\sin \theta _5& 0& 0\\\end{matrix} \right] D2?(��)=???????????00?m1?l3?s1?sin(��1??��3?)00?m1?s1?sin��1?m1?s1?cos��1??000?m2?l4?s2?sin(��2??��4?)0m2?s2?sin��2?m2?s2?cos��2??m1?l3?s1?sin(��1??��3?)0000?(m1?l3?+m3?s3?)sin��3?(m1?l3?+m3?s3?)cos��3??0m2?l4?s2?sin(��2??��4?)000(m2?l4?+m4?s4?)sin��4?(m2?l4?+m4?s4?)cos��4??00000m5?s5?sin��5??m5?s5?sin��5??0000000?0000000????????????
D 4 ( �� ) = [ ? m 1 g s 1 sin ? �� 1 ? m 2 g s 2 sin ? �� 2 ? m 3 g s 3 sin ? �� 3 ? m 1 g l 3 sin ? �� 3 ? m 4 g s 4 sin ? �� 4 ? m 2 g l 4 sin ? �� 4 m 5 g s 5 sin ? �� 5 0 0 ] \boldsymbol{D}_4\left( \boldsymbol{\theta } \right) =\left[ \begin{array}{c} -m_1gs_1\sin \theta _1\\ -m_2gs_2\sin \theta _2\\ -m_3gs_3\sin \theta _3-m_1gl_3\sin \theta _3\\ -m_4gs_4\sin \theta _4-m_2gl_4\sin \theta _4\\ m_5gs_5\sin \theta _5\\ 0\\ 0\\\end{array} \right] D4?(��)=????????????m1?gs1?sin��1??m2?gs2?sin��2??m3?gs3?sin��3??m1?gl3?sin��3??m4?gs4?sin��4??m2?gl4?sin��4?m5?gs5?sin��5?00????????????
�� l �� �� r \boldsymbol{\tau }_l\text{��}\boldsymbol{\tau }_r ��l?����r?Ϊ��ײ�Ӵ�Լ������, B B BΪת�����Ӿ���
4 �����
[1]������, ������, ��Ԫ��,��. ����Matlab��˫������˶���ѧ���漰��������ƽ̨[J]. ϵͳ����ѧ��, 2011(05):977-983.
[2] Chevallereau C , Abba G , Aoustin Y , et al. RABBIT: A Testbed for Advanced Control Theory[J]. Control Systems IEEE, 2013, 23(5):57-79.
[3]������, ��ƽ��. ������˫������˽�ģ�Ϳ���ϵͳ����[J]. ���������, 2010.
[4]������, ��Ծ��. 5����˫������˽�ģ�Ϳ���ϵͳ����[J]. ϵͳ����ѧ��, 2008, 27(020):5682-5686.