GNSS原始测量值中多路径的检测和评估
多路径误差观测值的主要误差来源,如何检测和评估多路径强度是高精度定位的重要内容。本文主要总结了当前文献中所用的一些多路径检测和评估方法,分析了各种方法的原理以及优缺点。
常用多路径检测方法
1. C M C CMC CMC(code-minus-carrier)
直接用伪距减去载波相位的方法是最通用、最简单的方法,最终项中剩下的是两倍的电离层误差、整周模糊度、伪距多路径、载波相位多路径、伪距噪声、载波相位噪声。如果只看伪距的多路径误差,那么载波相位多路径和载波相位噪声较小可以忽略不计。

由于通常电离层变化缓慢,整周模糊度在没有周跳的情况下保持不变,因此可以用减去平均值的方法来获得(多路径误差+伪距噪声)项。不过这里面存在几个问题:
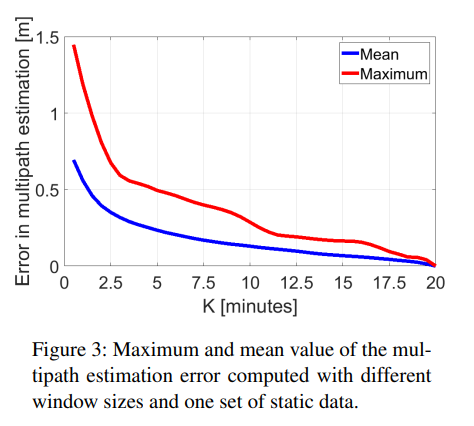
- 在周跳比较频繁的情况,参考文献【1】指出,如果用于平均的时间窗口不够长,可能会把平均的多路径值也减掉。如下图所示,用不同时间窗口做平均,最后得出的多路径误差可能不一致。
- 即使减去平均值,剩余项中仍保留了伪距噪声。伪距噪声和接收机类型相关,如果一个接收机噪声较大,那么同样环境下,用同样计算方法、统计方法算出来的"多路径误差”可能就显得比较大。
TEQC中计算多路径RMS的方法和CMC方法相似,只不过使用了L1和L2测量值的组合,先将电离层误差消除,具体计算方法可以参考这篇博客TEQC GNSS数据质量分析算法,TEQC默认用50个点计算均值,减去均值后,再计算RMS。TEQC的方法同样存在上述两个问题。
我觉得这个方法的应用难点在于,无法剥离伪距噪声的影响。当然如果有伪距噪声水平先验值,或者已知伪距噪声极小,那通过上述方法也可以正确检测多路径,并且评估多路径强度。
2. Δ C M C \Delta CMC ΔCMC
这个方法实际就是两个相邻历元的CMC再做差。

文献【1~2】对该方法进行了详细的描述,包括了如何进行检测阈值的设置。
- 这个方法的优点在于相比于CMC,利用历元间做差,如果没有周跳,那么模糊度项被消除,而由于电离层变化率是一个很小的值,也可以忽略,那么结果中就只剩下前后历元多路径变化项,和前后历元伪距噪声变化项。
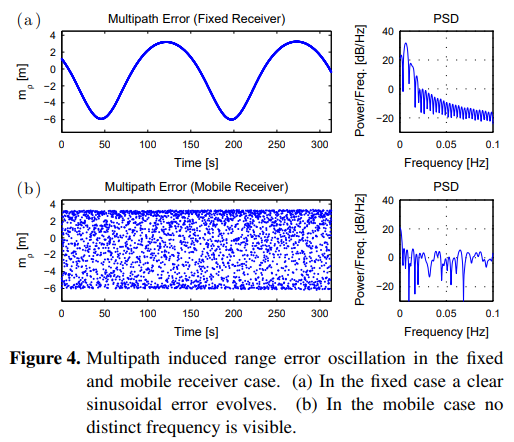
- 方法的缺点在于伪距噪声由于前后历元做差,因此伪距噪声会被放大。在文献【1~2】同样也讨论了需要预知接收机的伪距噪声水平,才能进行阈值的设置。另外,这种方法我认为更适用于动态情况,因为静态情况下,多路径通常呈正弦波,如下图(a)中所示。如果采样率不够高,那么前后历元相减的方法,会削弱多路径的影响;而在动态情况下,多路径更趋近于白噪声,前后相减,多路径可能不容易被削弱。
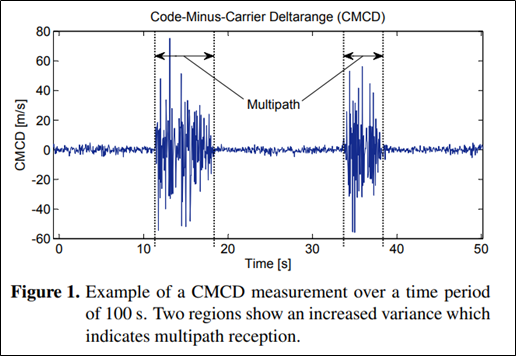
下图摘自文献【2】,如果动态情况下有较强的多路径, 可以看到 Δ C M C \Delta CMC ΔCMC的噪声水平大大增加。
3. 频谱分析法
因为静态情况下,多路径通常呈正弦波且频率较低,而在动态情况下,多路径更趋近于白噪声,因此这种方法我认为仅适用于静态情况下多路径分析。
(1) 白噪声的频谱特性
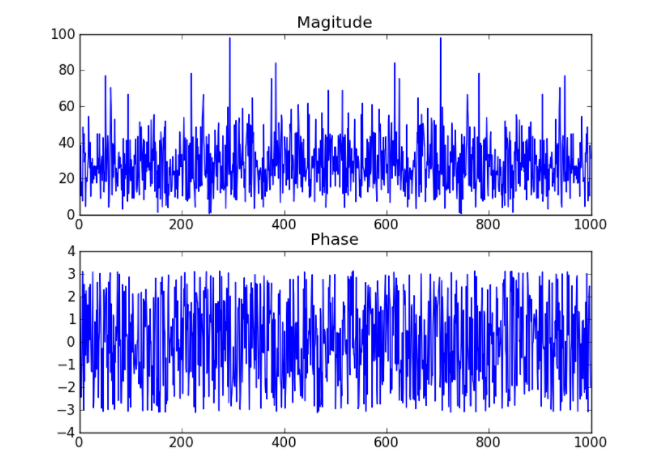
理论上,白噪声的功率谱密度是常值。但是通常离散信号的白噪声带宽是有限的,通过傅里叶变换后,傅里叶系数也还是白噪声,因此在频谱图上呈白噪声分布。对白噪声频谱的理解可以参考该问答What is the phase and magnitude response of white noise?
附上python画白噪声频谱的代码:
import scipy.signal as sg
import numpy as np
import matplotlib.pyplot as plt
e = np.random.normal(0,1,1e3)
E = sg.fft(e)
plt.figure("Bode plot")
plt.subplot(211)
plt.title("Magitude")
plt.plot(abs(E))
plt.subplot(212)
plt.title("Phase")
plt.plot(np.angle(E))
plt.show()
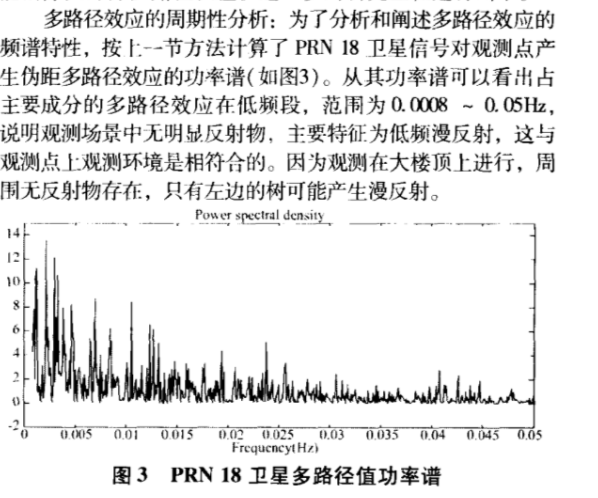
(2)静态下多路径的频谱特性
参考文献【3~4】,多路径在低频段可能出现一个或者多个正弦信号。但是需要注意,白噪声分布在所有频段上,即使是低频部分,也是白噪声和多路径信号的叠加。
4. 其他方法
- 基于载噪比的方法 (局限:载噪比通常取决于接收机,各厂家特性可能不同)
- 基于3D地图或者3D环境的方法 (局限:需要除卫星观测值外的信息)
- 机器学习的方法
参考文献
【1】 Caamano, Maria, et al. “Detection of GNSS Multipath with Time-Differenced Code-Minus-Carrier for Land-Based Applications.” 2020 European Navigation Conference (ENC). IEEE, 2020.
【2】 Beitler, Anton, et al. “CMCD: multipath detection for mobile GNSS receivers.” Proceedings of the 2015 International Technical Meeting of The Institute of Navigation. 2015.
【3】[郭杭, 余敏, & 薛光辉. (2006). Gps多路径效应实例计算与分析. 测绘科学(05), 95-96.
【4】Zhang, Yujie, and Chris Bartone. “Multipath mitigation in the frequency domain.” PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No. 04CH37556). IEEE, 2004.