继上文:
三、图像翻转变换
?
? ? ? ? 在OpenCV中提供了flip()函数用于图像的翻转,该函数的原型如下:
void cv::filp(InputArray src,
OutputArray dst,
int flipCode
)src:输入图像。
dst:输出图像,与src具有相同的大小,数据类型及通道数。
filpCode:翻转方式标志。数值大于0表示绕y轴进行翻转;数值等于0,表示绕x轴进行翻转;数值小于0,表示绕两个轴翻转。
? ? ? ? 这个函数很简单,没有什么需要讲的,就不放代码实例了。
四、图像仿射变换
? ? ? ? 在OpenCV中是没有图像旋转的函数的,所以我们通过图像仿射变换来实现图像的旋转。我们首先需要确定旋转角度和旋转中心,之后确定旋转矩阵,最终通过仿射变换实现图像的旋转。在OpenCV4中提供了getRotationMatrix2D()函数用于计算旋转矩阵,提供了warpAffine()函数用于实现图像的仿射变换。
如果不了解仿射的可以看下面的内容:
getRotationMatrix2D()函数原型如下:
Mat cv::getRotationMatrix2D (Point2f center,
double angle,
double scale
)center:图像旋转的中心位置。
angle:图像旋转的角度,单位为度,正值为逆时针旋转。
scale:两个轴的比例因子,可以实现旋转过程中的图像缩放,不缩放则输入1。
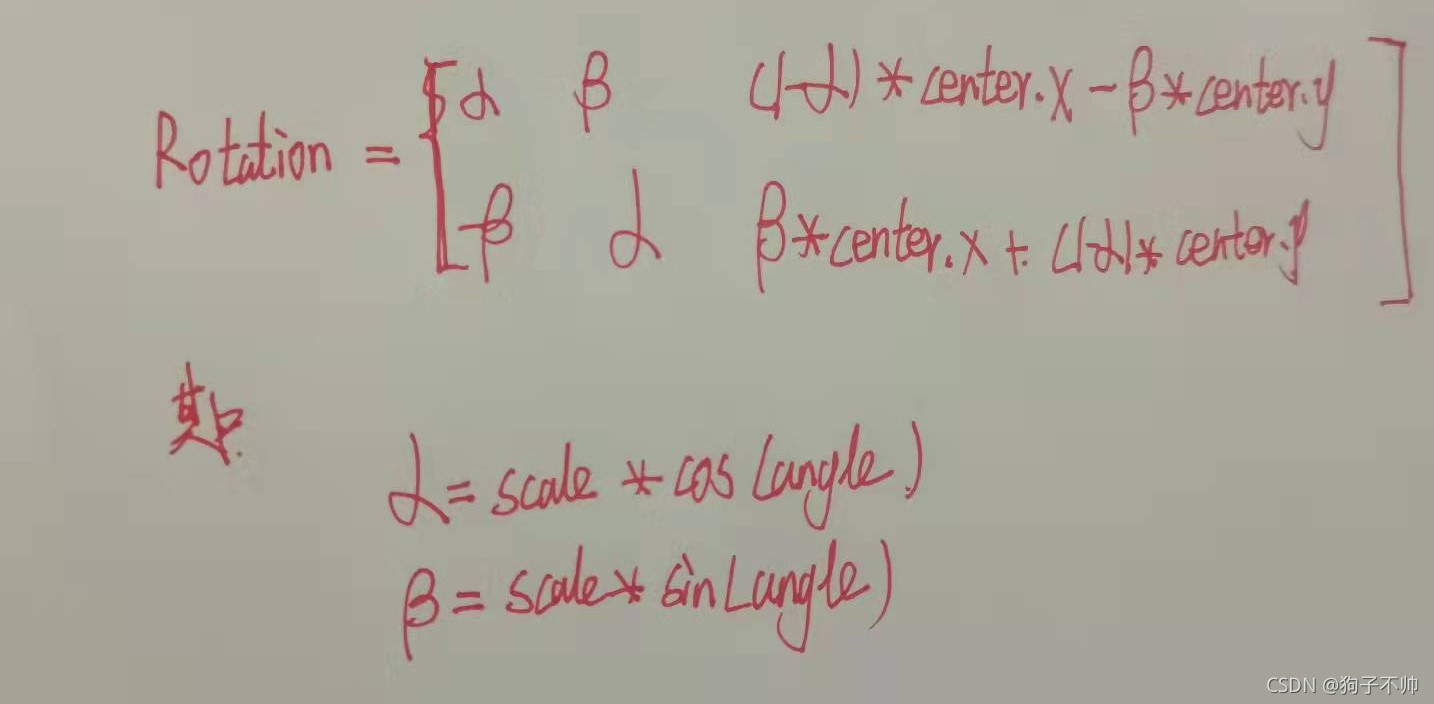
? ? ? ? 该函数输入旋转角度和旋转中心,返回图像旋转矩阵,返回值的数据类型为Mat类,是一个2*3的矩阵。如果我们已知图像旋转矩阵,那么可以自己生成旋转矩阵而不调用该函数。函数生成的旋转矩阵与旋转角度和旋转中心的关系式:
在确定旋转矩阵后,通过warpAffine()函数进行仿射变换,就可以实现图像的旋转,函数原型如下:
void cv::warpAffine(InputArray src,
OutputArray dst,
InputArray M,
Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar()
)src:输入图像。
dst:仿射变换后输出图像,与src数据类型相同,尺寸与dsize相同。
M:2*3的变换矩阵。
dsize:输出图像的尺寸。
flags:插值方法标志,可选参数集含义在下表中给出。
borderMode:像素边界外推方法的标志。
borderValue:填充边界使用的数值,默认情况下为0。
| 方法标志 | 简记 | 作用 |
| WARP_FILL_OUTLIERS | 8 | 填充所有输出图像的像素,如果部分像素落在输入图像的边界外,则它们的值设定为fillval。 |
| WARP_INVERSE_MAP | 16 | 设置为M输出图像到输入图像的反变换。 |
| 方法标志 | 简记 | 作用 |
| BORDER_CONSTANT | 0 | 用特定值填充,如iiiiiii|abcdefgh|iiiiiii |
| BORDER_REPLICATE | 1 | 两端复制填充,如aaaaaa|abcdefgh|hhhhhhh |
| BORDER_REFLECT | 2 | 倒序填充,如fedcba|abcdefgh|hgfedcba |
| BORDER_WRAP | 3 | 正序填充,如cdefgh|abcdefgh|abcdefg |
| BORDER_REFLECT_101 | 4 | 不包含边界值的倒序填充,如gfedcb|abcdefgh|gfedcba |
| BORDER_TRANSPARENT | 5 | 随机填充,uvwxyz|abcdefgh|ijklmno |
| BORDER_REFLECT101 | 6 | 与BORDER_REFLECT_101相同 |
| BORDER_DEFAULT | 7 | 与BORDER_REFLECT_101相同 |
| BORDER_ISOLATED | 8 | 不关心感兴趣区域之外的部分 |
? ? ? ? 此外仿射变换又称为三点变换。如果知道变换前后两幅图像中3个像素点坐标的对应关系,就可以求得仿射变换中的变换矩阵M。OpenCV中提供了利用三个对应像素点来确定变换矩阵M函数getAffineTransform(),该函数的原型如下:
Mat cv::getAffineTransform(const Point2f src[],
const Point2f dst[],
)src[]:源图像中的3个像素坐标。
dst[]:目标图像中的3个像素坐标。
? ? ? ? 该函数两个输入量都是存放浮点多表的数组,在生成数组的时候,与像素点的输入顺序无关,但是需要保证像素点的对应关系,函数返回值是一个2*3的变换矩阵。
代码实例:
#include<opencv2/opencv.hpp>
#include<iostream>
#include<vector>
using namespace std;
using namespace cv;
int main()
{
Mat img = imread("D:\\lena.jpg");
if (img.empty())
{
cout << "请确认图像的文件名字是否正确" << endl;
return -1;
}
Mat rotation0, totation1, img_warp0, img_warp1;
double angle = 30; //设置图像的翻转角度
Size dst_size(img.rows, img.cols); //设置输出图像的尺寸
Point2f center(img.rows / 2.0, img.cols / 2.0); //设置图像的旋转中心
rotation0 = getRotationMatrix2D(center, angle, 1);
warpAffine(img, img_warp0, rotation0, dst_size);
imshow("img_warp()", img_warp0);
waitKey(0);
return 0;
}