GTSAM Tutorialѧϰ�ʼ�
GTSAM Tutorialѧϰ�ʼ�
Ϊ��ѧϰLIO-SAM,�ҿ��ٹ���һ�顶�����˸�֪:����ͼ��SLAM�е�Ӧ�á��Լ��������������ݻ����˷����ġ�GTSAM Tutorial��,������������Ҫ�ǡ�GTSAM Tutorial����ѧϰ�ʼ�,����GTSAM��LIO-SAM�е�ʵ��Ӧ�ý���һЩ����,�����GTSAM�л����˽��ͬѧ����ֱ�������������֡�
1. ����ԭ��
����ͼ��һ������SLAM����
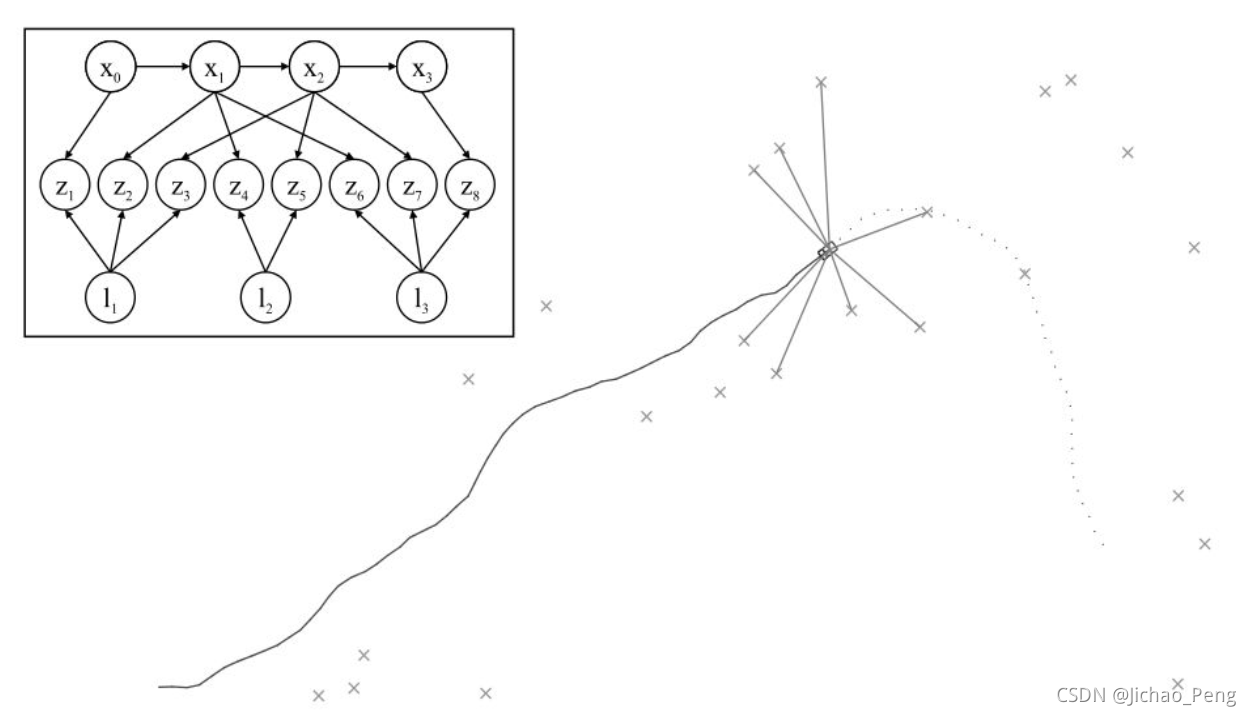
����,�����˶�������Ĺ۲���Թ���Ϊ������ͼ��ʾ��һ����Ҷ˹����,�ñ�Ҷ˹������
x
i
x_i
xi?Ϊ������״̬,
z
i
z_i
zi?Ϊ�����˹۲�ֵ,
l
i
l_i
li?Ϊ�����㡣����һ����Ҷ˹��������Ϸֲ����ʿ���ͨ�����¹�ʽ��ʾ:
P
(
X
,
L
,
Z
)
=
P
(
x
0
)
��
i
=
1
M
P
(
x
i
�O
x
i
?
1
,
u
i
)
��
k
=
1
K
P
(
z
k
�O
x
i
k
,
l
j
k
)
P(X, L, Z)=P\left(x_{0}\right) \prod_{i=1}^{M} P\left(x_{i} \mid x_{i-1}, u_{i}\right) \prod_{k=1}^{K} P\left(z_{k} \mid x_{i_{k}}, l_{j_{k}}\right)
P(X,L,Z)=P(x0?)i=1��M?P(xi?�Oxi?1?,ui?)k=1��K?P(zk?�Oxik??,ljk??)����,
P
(
x
0
)
P\left(x_{0}\right)
P(x0?)Ϊ����״̬���ʷֲ�,
P
(
x
i
�O
x
i
?
1
,
u
i
)
P\left(x_{i} \mid x_{i-1}, u_{i}\right)
P(xi?�Oxi?1?,ui?)��ʾ��֪״̬
x
i
?
1
x_{i-1}
xi?1?�Ϳ�����
u
i
u_{i}
ui?�ֲ��������,
x
i
\boldsymbol{x}_{i}
xi?�ĸ��ʷֲ�,����Ϊ:
x
i
=
f
i
(
x
i
?
1
,
u
i
)
+
w
i
?
x_{i}=f_{i}\left(x_{i-1}, u_{i}\right)+w_{i} \quad \Leftrightarrow
xi?=fi?(xi?1?,ui?)+wi??
P
(
x
i
�O
x
i
?
1
,
u
i
)
��
exp
?
?
1
2
��
f
i
(
x
i
?
1
,
u
i
)
?
x
i
��
��
i
2
P\left(x_{i} \mid x_{i-1}, u_{i}\right) \propto \exp -\frac{1}{2}\left\|f_{i}\left(x_{i-1}, u_{i}\right)-x_{i}\right\|_{\Lambda_{i}}^{2}
P(xi?�Oxi?1?,ui?)��exp?21?��fi?(xi?1?,ui?)?xi?����i?2?
P
(
z
k
�O
x
i
k
,
l
j
k
)
P\left(z_{k} \mid x_{i_{k}}, l_{j_{k}}\right)
P(zk?�Oxik??,ljk??)��ʾ��֪״̬
x
i
k
\boldsymbol{x}_{i_{k}}
xik??��
l
j
k
l_{j_{k}}
ljk??�ķֲ��������,
z
k
z_{k}
zk?�ĸ��ʷֲ�,����Ϊ:
z
k
=
h
k
(
x
i
k
,
l
j
k
)
+
v
k
?
z_{k}=h_{k}\left(x_{i_{k}}, l_{j_{k}}\right)+v_{k} \quad \Leftrightarrow
zk?=hk?(xik??,ljk??)+vk??
P
(
z
k
�O
x
i
k
,
l
j
k
)
��
exp
?
?
1
2
��
h
k
(
x
i
k
,
l
j
k
)
?
z
k
��
��
k
2
P\left(z_{k} \mid x_{i_{k}}, l_{j_{k}}\right) \propto \exp -\frac{1}{2}\left\|h_{k}\left(x_{i_{k}}, l_{j_{k}}\right)-z_{k}\right\|_{\Sigma_{k}}^{2}
P(zk?�Oxik??,ljk??)��exp?21?��hk?(xik??,ljk??)?zk?����k?2?��������Ϸֲ����ٶ�Ϊ��˹�ֲ�,��ô�Ϳ��Թ�����������ͼ: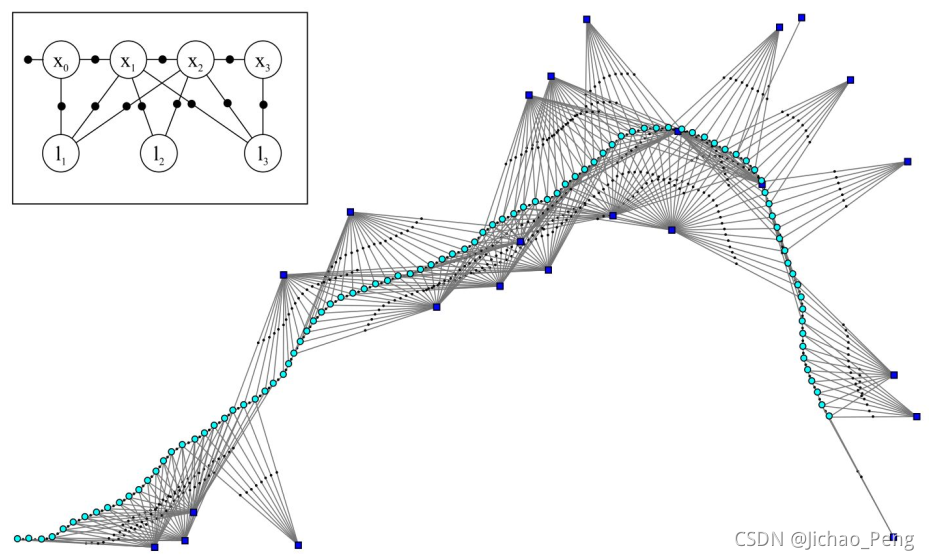
����ͨ�����¹�ʽ��ʾ��������ͼ:
P
(
��
)
��
��
i
?
i
(
��
i
)
��
{
i
,
j
}
,
i
<
j
��
i
j
(
��
i
,
��
j
)
,
��
?
(
X
,
L
)
P(\Theta) \propto \prod_{i} \phi_{i}\left(\theta_{i}\right) \prod_{\{i, j\}, i<j} \psi_{i j}\left(\theta_{i}, \theta_{j}\right),\Theta \triangleq(X, L)
P(��)��i��??i?(��i?){i,j},i<j��?��ij?(��i?,��j?),��?(X,L)����
?
0
(
x
0
)
��
P
(
x
0
)
\phi_{0}\left(x_{0}\right) \propto P\left(x_{0}\right)
?0?(x0?)��P(x0?)
��
(
i
?
1
)
i
(
x
i
?
1
,
x
i
)
��
P
(
x
i
�O
x
i
?
1
,
u
i
)
\psi_{(i-1) i}\left(x_{i-1}, x_{i}\right) \propto P\left(x_{i} \mid x_{i-1}, u_{i}\right)
��(i?1)i?(xi?1?,xi?)��P(xi?�Oxi?1?,ui?)
��
i
k
j
k
(
x
i
k
,
l
j
k
)
��
P
(
z
k
�O
x
i
k
,
l
j
k
)
\psi_{i_{k} j_{k}}\left(x_{i_{k}}, l_{j_{k}}\right) \propto P\left(z_{k} \mid x_{i_{k}}, l_{j_{k}}\right)
��ik?jk??(xik??,ljk??)��P(zk?�Oxik??,ljk??)����,�����൱�ڽ�������״̬����Χ�ĵ�ͼ�㶼��ͬ������ͼ�е�һ������,��������ͼ�ĺ��������ʵ�Ϳ��Խ�ģ����������֮��ĺ�����ʵij˻�:
f
(
��
)
=
��
i
f
i
(
��
i
)
��
?
(
X
,
L
)
?for?each?
f
i
(
��
i
)
��
exp
?
(
?
1
2
��
h
i
(
��
i
)
?
z
i
��
��
i
2
)
f(\Theta)=\prod_{i} f_{i}\left(\Theta_{i}\right) \quad \Theta \triangleq(X, L) \quad \text { for each } f_{i}\left(\Theta_{i}\right) \propto \exp \left(-\frac{1}{2}\left\|h_{i}\left(\Theta_{i}\right)-z_{i}\right\|_{\Sigma_{i}}^{2}\right)
f(��)=i��?fi?(��i?)��?(X,L)?for?each?fi?(��i?)��exp(?21?��hi?(��i?)?zi?����i?2?)�����ǵ�Ŀ��������ܵĺ���������:
��
?
��
��
��
��
:
=
arg
?
max
?
��
f
(
��
)
\Theta^{*�����Ż�:}=\underset{\Theta}{\arg \max } f(\Theta)
��?��������:=��argmax?f(��)ֱ����������������ʲô���Ļ�����״̬�͵�ͼ��ֲ������õ�ǰ�����й۲ⷢ���ĸ������,��Ϊ�Ǹ�˹���ʷֲ�,�������ͨ�������ʷֲ�ת��������:
arg
?
min
?
��
(
?
log
?
f
(
��
)
)
=
arg
?
min
?
��
1
2
��
i
��
h
i
(
��
i
)
?
z
i
��
��
i
2
\underset{\Theta}{\arg \min }(-\log f(\Theta))=\underset{\Theta}{\arg \min } \frac{1}{2} \sum_{i}\left\|h_{i}\left(\Theta_{i}\right)-z_{i}\right\|_{\Sigma_{i}}^{2}
��argmin?(?logf(��))=��argmin?21?i��?��hi?(��i?)?zi?����i?2?����������Ҫ����ͨ���������Ż��㷨,�����˹ţ�ٷ��������IJ���,��ô��������������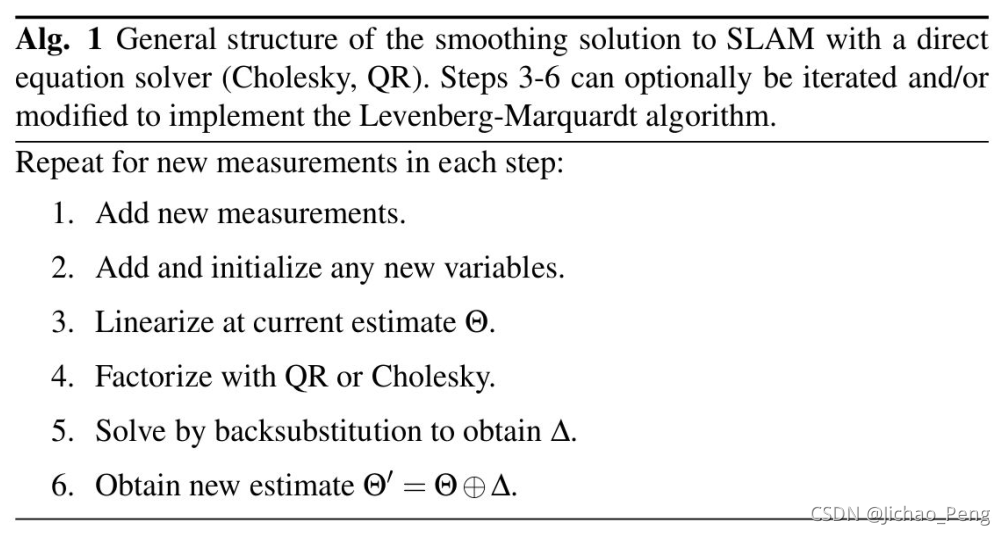
���ﻹ�м�����Ҫע��:
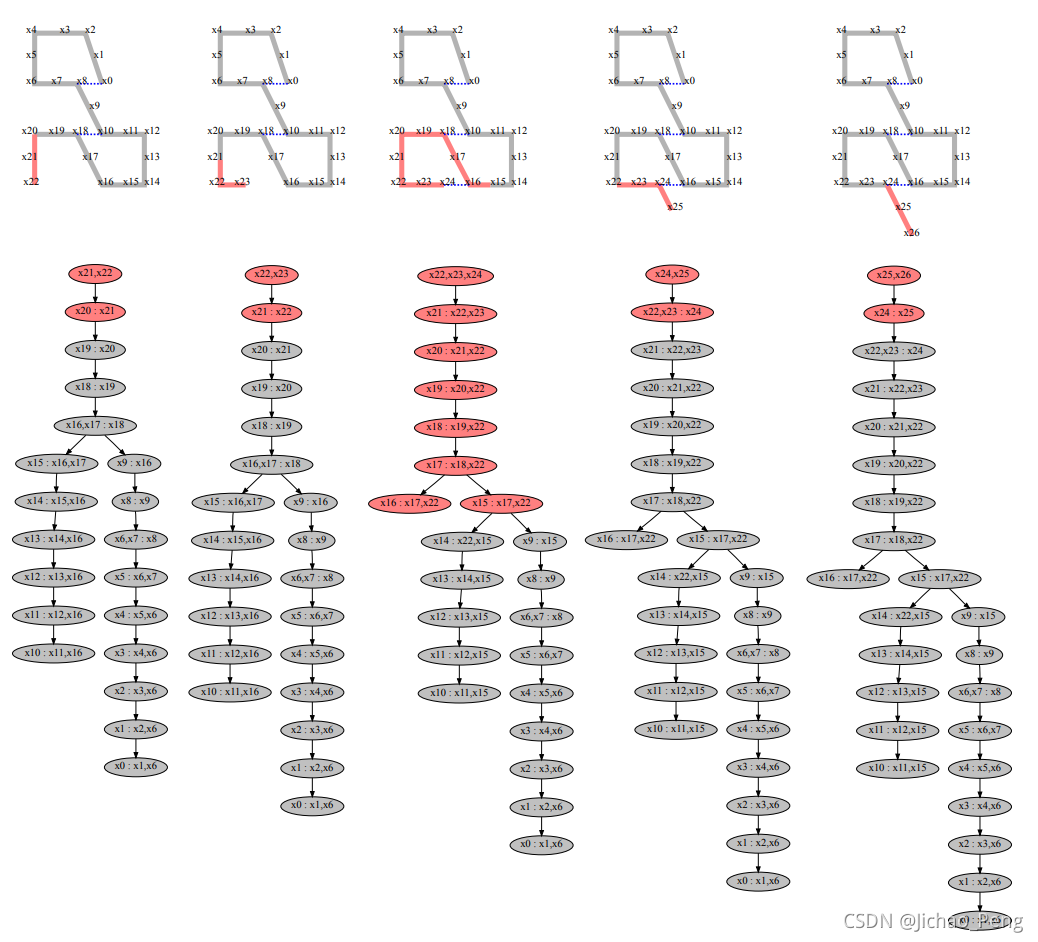
- �����Ż�:���Ͻ��ܵĶ��Ƕ���һ���̶�Batch���ݵ���ⷽ��,��ʵ�ʵ�SLAM������һ����������,�ڻ��ں���Ż��ķ��������Ż�:��,ͨ���Dz��û����ķ�ʽ�����оֲ���ͼ�Ż�,����GTSAM��,��ͨ��iSAM2������Bayers Tree��ʵ�������Ż�,����ͼ��ʾ,��ɫ�����ʾGTSAM�����Ż�������,GTSAMֻ��ȡ��ǰ״̬�ٽ���״̬�͵�ͼ������Ż�,�����ڼ�ʹ�����ػ�,Ҳֻ���ڻػ�������Χ�����Ż�,��һ����ϸ���ڡ�iSAM2: Incremental Smoothing and Mapping Using the Bayes Tree����
- �Զ�����:����֪���������ڸ�˹ţ�ٷ��������IJ�����,����һ����Ҫ���������� A X = b AX=b AX=b,���þ���ͨ����QR�ֽ��Cholesky�ֽ����ַ���,����QR�ֽ�����: Q T A = [ R 0 ] Q T b = [ d e ] Q^{T} A=\left[\begin{array}{l} R \\ 0 \end{array}\right] \quad Q^{T} b=\left[\begin{array}{l} d \\ e \end{array}\right] QTA=[R0?]QTb=[de?] R �� = d R \delta=d R��=dCholesky�ֽ�����: A T A �� ? = A T b A^{T} A \delta^{*}=A^{T} b ATA��?=ATb I ? A T A = R T R \mathcal{I} \triangleq A^{T} A=R^{T} R I?ATA=RTR ?first? R T y = A T b ?and?then? R �� ? = y \text { first } R^{T} y=A^{T} b \text { and then } R \delta^{*}=y ?first?RTy=ATb?and?then?R��?=yCholesky�ֽ�Ч����ijЩ��������QR�ֽ�Ҫ��һ��������,����Cholesky�ֽ��ھ����������ʱ�ȶ��Բ���QR�ֽ�,���Dz��������ַֽⷽ��,�ֽ�Ч�ʶ��ܴ������ȡ���ھ����ϡ����,��GTSAM��ͨ��COLAMD�㷨ʹ������A������ϡ��,�Ӷ������Ч�ʡ�
2. Demo����
�ڡ�GTSAM Tutorial���ṩ��Demo������,��������ι�������ͼһ�����ػ�������ͼ

���ȹ���һ������ͼ����
// Create a factor graph container
NonlinearFactorGraph graph;
������������������������,Ҳ����ͼ�е���ɫ���Ӳ���,ע�������ΪһԪ��
// prior measurment noise model
noiseModel::Diagonal::shared_ptr priorModel = noiseModel::Diagonal::Sigmas(Vector3(1.0, 1.0, 0.1));
// Add a prior on the first pose, setting it to the origin
// The prior is needed to fix/align the whole trajectory at world frame
// A prior factor consists of a mean value and a noise model (covariance matrix)
graph.add(PriorFactor<Pose2>(Symbol('x', 1), Pose2(0, 0, 0), priorModel));
Ȼ���ǹ�����������̼�����,Ҳ����ͼ�еĺ�ɫ���Ӳ���,��Щ����Ϊ��Ԫ��
// odometry measurement noise model (covariance matrix)
noiseModel::Diagonal::shared_ptr odomModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
// Add odometry factors
// Create odometry (Between) factors between consecutive poses
// robot makes 90 deg right turns at x3 - x5
graph.add(BetweenFactor<Pose2>(Symbol('x', 1), Symbol('x', 2), Pose2(5, 0, 0), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 2), Symbol('x', 3), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 3), Symbol('x', 4), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 4), Symbol('x', 5), Pose2(5, 0, -M_PI_2), odomModel));
���лػ�����,Ҳ����;�еĺ�ɫ���Ӳ���,������Ϊ��Ԫ��
// loop closure measurement noise model
noiseModel::Diagonal::shared_ptr loopModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
// Add the loop closure constraint
graph.add(BetweenFactor<Pose2>(Symbol('x', 5), Symbol('x', 2), Pose2(5, 0, -M_PI_2), loopModel));
��������Կ���,�������ӵĹ��̾����ȹ�������ģ��,Ȼ����������,�������ӵĽڵ�,�Լ���ʼֵ���ӵ�����ͼ��������,���������dz�ʼ�������ڵ������ģ��
// initial varible values for the optimization
// add random noise from ground truth values
Values initials;
initials.insert(Symbol('x', 1), Pose2(0.2, -0.3, 0.2));
initials.insert(Symbol('x', 2), Pose2(5.1, 0.3, -0.1));
initials.insert(Symbol('x', 3), Pose2(9.9, -0.1, -M_PI_2 - 0.2));
initials.insert(Symbol('x', 4), Pose2(10.2, -5.0, -M_PI + 0.1));
initials.insert(Symbol('x', 5), Pose2(5.1, -5.1, M_PI_2 - 0.1));
�����ǹ����Ż����Լ�ִ���Ż�
// Use Gauss-Newton method optimizes the initial values
GaussNewtonParams parameters;
// print per iteration
parameters.setVerbosity("ERROR");
// optimize!
GaussNewtonOptimizer optimizer(graph, initials, parameters);
Values results = optimizer.optimize();
ͨ��Marginals����Ի�ø����ڵ��Ż���IJв�ֵ
// Calculate marginal covariances for all poses
Marginals marginals(graph, results);
// print marginal covariances
cout << "x1 covariance:\n" << marginals.marginalCovariance(Symbol('x', 1)) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(Symbol('x', 2)) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(Symbol('x', 3)) << endl;
cout << "x4 covariance:\n" << marginals.marginalCovariance(Symbol('x', 4)) << endl;
cout << "x5 covariance:\n" << marginals.marginalCovariance(Symbol('x', 5)) << endl;
���Ͼ���Demo�����еĺ��IJ���,���Կ�����,GTSAM��������ͼ�Ĺ����Ƿdz������˵�,���������ǿ���GTSAM��ʵ�ʵĹ���������ôӦ�õġ�
3. LIO-SAM�в��ִ������
LIO-SAM�й���������ͼ����:
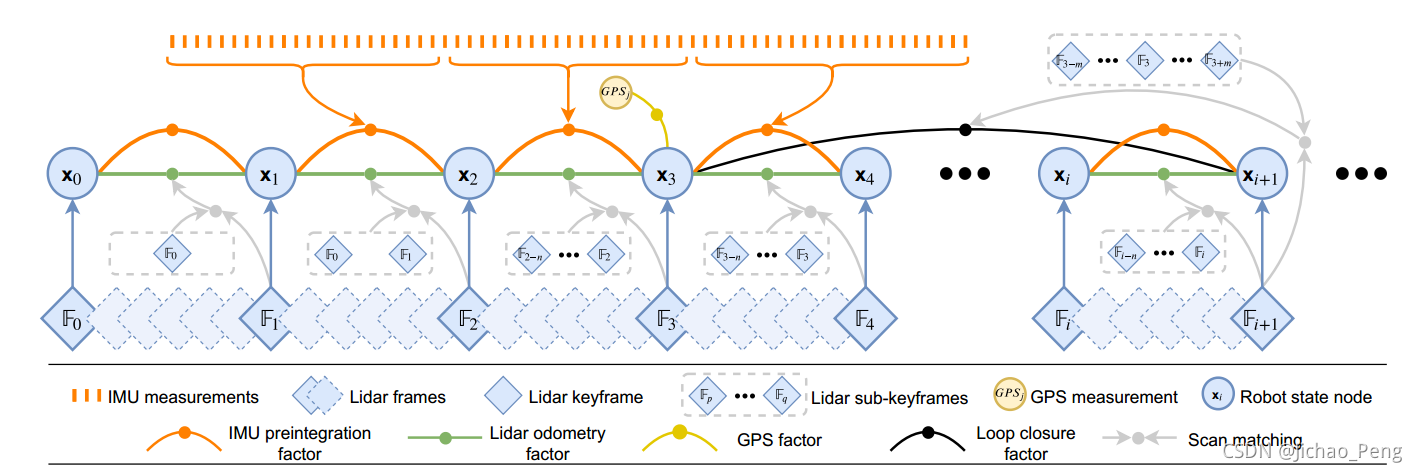
��ͼ����ȥ��һ������ͼ,������LIO-SAM��ʵ����һ�����������͵�����ͼ,��һ������ͼ����imuIntergration.cpp�ļ���,�ü�����̼�,��֡������̼�֮���IMUԤ��������������ͼ,�Ż���ǰ֡��״̬(����λ�ˡ��ٶȡ�ƫ��),�������dz�֮ΪԤ��������ͼ���ڶ�������ͼ����mapOptimization.cpp�ļ���,�ؼ�֡��������ͼ,���Ӽ�����̼����ӡ�GPS���ӡ��ջ�����,ִ������ͼ�Ż�,�������йؼ�֡λ��,�������dz�Ϊ�ؼ�֡����ͼ�������������(���ִ���ע�Ͳο�LIO-SAMԴ�����):
3.1 Ԥ��������ͼ
Ԥ��������ͼ��ش�����Ҫ��imuIntergration.cpp��IMUPreintegration����,���ඨ������:
class IMUPreintegration : public ParamServer
{
public:
std::mutex mtx;
// �����뷢��
ros::Subscriber subImu;
ros::Subscriber subOdometry;
ros::Publisher pubImuOdometry;
bool systemInitialized = false;
// ��������
gtsam::noiseModel::Diagonal::shared_ptr priorPoseNoise;
gtsam::noiseModel::Diagonal::shared_ptr priorVelNoise;
gtsam::noiseModel::Diagonal::shared_ptr priorBiasNoise;
gtsam::noiseModel::Diagonal::shared_ptr correctionNoise;
gtsam::noiseModel::Diagonal::shared_ptr correctionNoise2;
gtsam::Vector noiseModelBetweenBias;
// imuԤ������
gtsam::PreintegratedImuMeasurements *imuIntegratorOpt_;
gtsam::PreintegratedImuMeasurements *imuIntegratorImu_;
// imu���ݶ���
std::deque<sensor_msgs::Imu> imuQueOpt;
std::deque<sensor_msgs::Imu> imuQueImu;
// imu����ͼ�Ż������е�״̬����
gtsam::Pose3 prevPose_;
gtsam::Vector3 prevVel_;
gtsam::NavState prevState_;
gtsam::imuBias::ConstantBias prevBias_;
// imu״̬
gtsam::NavState prevStateOdom;
gtsam::imuBias::ConstantBias prevBiasOdom;
bool doneFirstOpt = false;
double lastImuT_imu = -1;
double lastImuT_opt = -1;
// ISAM2�Ż���
gtsam::ISAM2 optimizer;
gtsam::NonlinearFactorGraph graphFactors;
gtsam::Values graphValues;
const double delta_t = 0;
// ���ڼ�¼�ڼ����ؼ�֡
int key = 1;
// imu-lidarλ�˱任
gtsam::Pose3 imu2Lidar = gtsam::Pose3(gtsam::Rot3(1, 0, 0, 0), gtsam::Point3(-extTrans.x(), -extTrans.y(), -extTrans.z()));
gtsam::Pose3 lidar2Imu = gtsam::Pose3(gtsam::Rot3(1, 0, 0, 0), gtsam::Point3(extTrans.x(), extTrans.y(), extTrans.z()));
// ���캯��
IMUPreintegration();
// ����iSAM2�Ż���
void resetOptimization();
// ����
void resetParams();
// ���ļ�����̼�
void odometryHandler(const nav_msgs::Odometry::ConstPtr& odomMsg);
// IMU����ͼ�Ż�����ж�
bool failureDetection(const gtsam::Vector3& velCur, const gtsam::imuBias::ConstantBias& biasCur);
// ����ԭʼIMU����
void imuHandler(const sensor_msgs::Imu::ConstPtr& imu_raw);
};
������ij�Ա����������Ҫ�Ż��ĸ���״̬,�Լ������������ӵ�����Э����,��Щ�������ڹ��캯���г�ʼ��,�������ǿ����캯������:
IMUPreintegration()
{
// ����imuԭʼ����,����������ͼ�Ż��Ľ��,ʩ����֮֡���imuԤ�Ʒ���,Ԥ��ÿһʱ��(imuƵ��)��imu��̼�
subImu = nh.subscribe<sensor_msgs::Imu> (imuTopic, 2000, &IMUPreintegration::imuHandler, this, ros::TransportHints().tcpNoDelay());
// ���ļ�����̼�,����mapOptimization,����֮֡���imuԤ�Ʒ�����������ͼ,�Ż���ǰ֡λ��(���λ�˽����ڸ���ÿʱ�̵�imu��̼�,�Լ���һ������ͼ�Ż�)
subOdometry = nh.subscribe<nav_msgs::Odometry>("lio_sam/mapping/odometry_incremental", 5, &IMUPreintegration::odometryHandler, this, ros::TransportHints().tcpNoDelay());
// ����imu��̼�
pubImuOdometry = nh.advertise<nav_msgs::Odometry> (odomTopic+"_incremental", 2000);
// imuԤ���ֵ�����Э����
boost::shared_ptr<gtsam::PreintegrationParams> p = gtsam::PreintegrationParams::MakeSharedU(imuGravity);
p->accelerometerCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuAccNoise, 2); // acc white noise in continuous
p->gyroscopeCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuGyrNoise, 2); // gyro white noise in continuous
p->integrationCovariance = gtsam::Matrix33::Identity(3,3) * pow(1e-4, 2); // error committed in integrating position from velocities
gtsam::imuBias::ConstantBias prior_imu_bias((gtsam::Vector(6) << 0, 0, 0, 0, 0, 0).finished());; // assume zero initial bias
// ��������
priorPoseNoise = gtsam::noiseModel::Diagonal::Sigmas((gtsam::Vector(6) << 1e-2, 1e-2, 1e-2, 1e-2, 1e-2, 1e-2).finished()); // rad,rad,rad,m, m, m
priorVelNoise = gtsam::noiseModel::Isotropic::Sigma(3, 1e4); // m/s
priorBiasNoise = gtsam::noiseModel::Isotropic::Sigma(6, 1e-3); // 1e-2 ~ 1e-3 seems to be good
// ������̼�scan-to-map�Ż������з����˻�,��ѡ��һ���ϴ��Э����
correctionNoise = gtsam::noiseModel::Diagonal::Sigmas((gtsam::Vector(6) << 0.05, 0.05, 0.05, 0.1, 0.1, 0.1).finished()); // rad,rad,rad,m, m, m
correctionNoise2 = gtsam::noiseModel::Diagonal::Sigmas((gtsam::Vector(6) << 1, 1, 1, 1, 1, 1).finished()); // rad,rad,rad,m, m, m
noiseModelBetweenBias = (gtsam::Vector(6) << imuAccBiasN, imuAccBiasN, imuAccBiasN, imuGyrBiasN, imuGyrBiasN, imuGyrBiasN).finished();
// imuԤ������,����Ԥ��ÿһʱ��(imuƵ��)��imu��̼�(ת��lidarϵ��,�뼤����̼�ͬһ��ϵ)
imuIntegratorImu_ = new gtsam::PreintegratedImuMeasurements(p, prior_imu_bias); // setting up the IMU integration for IMU message thread
// imuԤ������,��������ͼ�Ż�
imuIntegratorOpt_ = new gtsam::PreintegratedImuMeasurements(p, prior_imu_bias); // setting up the IMU integration for optimization
}
��������������ͼ����ĵIJ��־��ڶ��ļ�����̼ƺ���������,��������:
/**
* ���ļ�����̼�,����mapOptimization
* 1��ÿ��100֡������̼�,����ISAM2�Ż���,������̼ơ��ٶȡ�ƫ����������,ִ���Ż�
* 2������ǰһ֡������̼��뵱ǰ֡������̼�֮���imuԤ������,��ǰһ֡״̬ʩ��Ԥ�������õ���ǰ֡��ʼ״̬����,��������mapOptimization�ĵ�ǰ֡λ��,��������ͼ�Ż�,���µ�ǰ֡״̬
* 3���Ż�֮��,ִ���ش���;�Ż�������imu��ƫ��,�����µ�ƫ�����¼��㵱ǰ������̼�ʱ��֮���imuԤ����,���Ԥ�������ڼ���ÿʱ��λ��
*/
void odometryHandler(const nav_msgs::Odometry::ConstPtr& odomMsg)
{
std::lock_guard<std::mutex> lock(mtx);
// ��ǰ֡������̼�ʱ���
double currentCorrectionTime = ROS_TIME(odomMsg);
// ȷ��imu�Ż���������imu���ݽ���Ԥ����
if (imuQueOpt.empty())
return;
// ��ǰ֡����λ��,����scan-to-mapƥ�䡢����ͼ�Ż����λ��
float p_x = odomMsg->pose.pose.position.x;
float p_y = odomMsg->pose.pose.position.y;
float p_z = odomMsg->pose.pose.position.z;
float r_x = odomMsg->pose.pose.orientation.x;
float r_y = odomMsg->pose.pose.orientation.y;
float r_z = odomMsg->pose.pose.orientation.z;
float r_w = odomMsg->pose.pose.orientation.w;
bool degenerate = (int)odomMsg->pose.covariance[0] == 1 ? true : false;
gtsam::Pose3 lidarPose = gtsam::Pose3(gtsam::Rot3::Quaternion(r_w, r_x, r_y, r_z), gtsam::Point3(p_x, p_y, p_z));
// 0. ϵͳ��ʼ��,��һ֡
if (systemInitialized == false)
{
// ����ISAM2�Ż���
resetOptimization();
// ��imu�Ż�������ɾ����ǰ֡������̼�ʱ��֮ǰ��imu����
while (!imuQueOpt.empty())
{
if (ROS_TIME(&imuQueOpt.front()) < currentCorrectionTime - delta_t)
{
lastImuT_opt = ROS_TIME(&imuQueOpt.front());
imuQueOpt.pop_front();
}
else
break;
}
// ������̼�λ����������
prevPose_ = lidarPose.compose(lidar2Imu);
gtsam::PriorFactor<gtsam::Pose3> priorPose(X(0), prevPose_, priorPoseNoise);
graphFactors.add(priorPose);
// �����ٶ���������
prevVel_ = gtsam::Vector3(0, 0, 0);
gtsam::PriorFactor<gtsam::Vector3> priorVel(V(0), prevVel_, priorVelNoise);
graphFactors.add(priorVel);
// ����imuƫ����������
prevBias_ = gtsam::imuBias::ConstantBias();
gtsam::PriorFactor<gtsam::imuBias::ConstantBias> priorBias(B(0), prevBias_, priorBiasNoise);
graphFactors.add(priorBias);
// �����ڵ㸳��ֵ
graphValues.insert(X(0), prevPose_);
graphValues.insert(V(0), prevVel_);
graphValues.insert(B(0), prevBias_);
// �Ż�һ��
optimizer.update(graphFactors, graphValues);
graphFactors.resize(0);
graphValues.clear();
// �����Ż�֮���ƫ��
imuIntegratorImu_->resetIntegrationAndSetBias(prevBias_);
imuIntegratorOpt_->resetIntegrationAndSetBias(prevBias_);
key = 1;
systemInitialized = true;
return;
}
// ÿ��100֡������̼�,����ISAM2�Ż���,��֤�Ż�Ч��
if (key == 100)
{
// ǰһ֡��λ�ˡ��ٶȡ�ƫ������ģ��
gtsam::noiseModel::Gaussian::shared_ptr updatedPoseNoise = gtsam::noiseModel::Gaussian::Covariance(optimizer.marginalCovariance(X(key-1)));
gtsam::noiseModel::Gaussian::shared_ptr updatedVelNoise = gtsam::noiseModel::Gaussian::Covariance(optimizer.marginalCovariance(V(key-1)));
gtsam::noiseModel::Gaussian::shared_ptr updatedBiasNoise = gtsam::noiseModel::Gaussian::Covariance(optimizer.marginalCovariance(B(key-1)));
// ����ISAM2�Ż���
resetOptimization();
// ����λ����������,��ǰһ֡��ֵ��ʼ��
gtsam::PriorFactor<gtsam::Pose3> priorPose(X(0), prevPose_, updatedPoseNoise);
graphFactors.add(priorPose);
// �����ٶ���������,��ǰһ֡��ֵ��ʼ��
gtsam::PriorFactor<gtsam::Vector3> priorVel(V(0), prevVel_, updatedVelNoise);
graphFactors.add(priorVel);
// ����ƫ����������,��ǰһ֡��ֵ��ʼ��
gtsam::PriorFactor<gtsam::imuBias::ConstantBias> priorBias(B(0), prevBias_, updatedBiasNoise);
graphFactors.add(priorBias);
// �����ڵ㸳��ֵ,��ǰһ֡��ֵ��ʼ��
graphValues.insert(X(0), prevPose_);
graphValues.insert(V(0), prevVel_);
graphValues.insert(B(0), prevBias_);
// �Ż�һ��
optimizer.update(graphFactors, graphValues);
graphFactors.resize(0);
graphValues.clear();
key = 1;
}
// 1. ����ǰһ֡�뵱ǰ֮֡���imuԤ������,��ǰһ֡״̬ʩ��Ԥ�������õ���ǰ֡��ʼ״̬����,��������mapOptimization�ĵ�ǰ֡λ��,��������ͼ�Ż�,���µ�ǰ֡״̬
while (!imuQueOpt.empty())
{
// ��ȡǰһ֡�뵱ǰ֮֡���imu����,����Ԥ����
sensor_msgs::Imu *thisImu = &imuQueOpt.front();
double imuTime = ROS_TIME(thisImu);
if (imuTime < currentCorrectionTime - delta_t)
{
// ��֡imu����ʱ����
double dt = (lastImuT_opt < 0) ? (1.0 / 500.0) : (imuTime - lastImuT_opt);
// imuԤ������������:���ٶȡ����ٶȡ�dt
imuIntegratorOpt_->integrateMeasurement(
gtsam::Vector3(thisImu->linear_acceleration.x, thisImu->linear_acceleration.y, thisImu->linear_acceleration.z),
gtsam::Vector3(thisImu->angular_velocity.x, thisImu->angular_velocity.y, thisImu->angular_velocity.z), dt);
lastImuT_opt = imuTime;
// �Ӷ�����ɾ���Ѿ�������imu����
imuQueOpt.pop_front();
}
else
break;
}
// ����imuԤ��������
const gtsam::PreintegratedImuMeasurements& preint_imu = dynamic_cast<const gtsam::PreintegratedImuMeasurements&>(*imuIntegratorOpt_);
// ����:ǰһ֡λ��,ǰһ֡�ٶ�,��ǰ֡λ��,��ǰ֡�ٶ�,ǰһ֡ƫ��,Ԥ������
gtsam::ImuFactor imu_factor(X(key - 1), V(key - 1), X(key), V(key), B(key - 1), preint_imu);
graphFactors.add(imu_factor);
// ����imuƫ������,ǰһ֡ƫ��,��ǰ֡ƫ��,�۲�ֵ,����Э����;deltaTij()�ǻ��ֶε�ʱ��
graphFactors.add(gtsam::BetweenFactor<gtsam::imuBias::ConstantBias>(B(key - 1), B(key), gtsam::imuBias::ConstantBias(),
gtsam::noiseModel::Diagonal::Sigmas(sqrt(imuIntegratorOpt_->deltaTij()) * noiseModelBetweenBias)));
// ���������
gtsam::Pose3 curPose = lidarPose.compose(lidar2Imu);
gtsam::PriorFactor<gtsam::Pose3> pose_factor(X(key), curPose, degenerate ? correctionNoise2 : correctionNoise);
graphFactors.add(pose_factor);
// ��ǰһ֡��״̬��ƫ��,ʩ��imuԤ�Ʒ���,�õ���ǰ֡��״̬
gtsam::NavState propState_ = imuIntegratorOpt_->predict(prevState_, prevBias_);
// �����ڵ㸳��ֵ
graphValues.insert(X(key), propState_.pose());
graphValues.insert(V(key), propState_.v());
graphValues.insert(B(key), prevBias_);
// �Ż�
optimizer.update(graphFactors, graphValues);
optimizer.update();
graphFactors.resize(0);
graphValues.clear();
// �Ż����
gtsam::Values result = optimizer.calculateEstimate();
// ���µ�ǰ֡λ�ˡ��ٶ�
prevPose_ = result.at<gtsam::Pose3>(X(key));
prevVel_ = result.at<gtsam::Vector3>(V(key));
// ���µ�ǰ֡״̬
prevState_ = gtsam::NavState(prevPose_, prevVel_);
// ���µ�ǰ֡imuƫ��
prevBias_ = result.at<gtsam::imuBias::ConstantBias>(B(key));
// ����Ԥ������,�����µ�ƫ��,������һ֡������̼ƽ�����ʱ��,Ԥ������������֮֡�������
imuIntegratorOpt_->resetIntegrationAndSetBias(prevBias_);
// imu����ͼ�Ż����,�ٶȻ���ƫ�ù���,��Ϊʧ��
if (failureDetection(prevVel_, prevBias_))
{
// ����
resetParams();
return;
}
// 2. �Ż�֮��,ִ���ش���;�Ż�������imu��ƫ��,�����µ�ƫ�����¼��㵱ǰ������̼�ʱ��֮���imuԤ����,���Ԥ�������ڼ���ÿʱ��λ��
prevStateOdom = prevState_;
prevBiasOdom = prevBias_;
// ��imu������ɾ����ǰ������̼�ʱ��֮ǰ��imu����
double lastImuQT = -1;
while (!imuQueImu.empty() && ROS_TIME(&imuQueImu.front()) < currentCorrectionTime - delta_t)
{
lastImuQT = ROS_TIME(&imuQueImu.front());
imuQueImu.pop_front();
}
// ��ʣ���imu���ݼ���Ԥ����
if (!imuQueImu.empty())
{
// ����Ԥ�����������µ�ƫ��
imuIntegratorImu_->resetIntegrationAndSetBias(prevBiasOdom);
// ����Ԥ����
for (int i = 0; i < (int)imuQueImu.size(); ++i)
{
sensor_msgs::Imu *thisImu = &imuQueImu[i];
double imuTime = ROS_TIME(thisImu);
double dt = (lastImuQT < 0) ? (1.0 / 500.0) :(imuTime - lastImuQT);
imuIntegratorImu_->integrateMeasurement(gtsam::Vector3(thisImu->linear_acceleration.x, thisImu->linear_acceleration.y, thisImu->linear_acceleration.z),
gtsam::Vector3(thisImu->angular_velocity.x, thisImu->angular_velocity.y, thisImu->angular_velocity.z), dt);
lastImuQT = imuTime;
}
}
++key;
doneFirstOpt = true;
}
���н�Ϊ����һ��ľ���gtsam::PreintegratedImuMeasurements���ʹ��,�Ҹ����൱�ڰ�һ��Ԥ���ּ����ſ˱��Ƶ���ʽ������װ������,��ֱ��Ҫ̫ˬ���Ӵ���������Ҳ���Կ�����,�ڹ�������ͼ������������һ��IJ��־������ӵ�Noise Model�ĸ������̡�
3.2 �ؼ�֡����ͼ
�ؼ�֡����ͼ��ش�����Ҫ��mapOptimization.cpp��saveKeyFramesAndFactor������,��mapOptimization.cpp�г��˹ؼ�֡����ͼ����,������Scan-to-Map��ƥ���㷨,�ؼ�֡�ж���,����Щ�������ǾͲ����������,saveKeyFramesAndFactor��������:
/**
* ���õ�ǰ֡Ϊ�ؼ�֡��ִ������ͼ�Ż�
* 1�����㵱ǰ֡��ǰһ֡λ�˱任,����仯̫С,����Ϊ�ؼ�֡,��֮��Ϊ�ؼ�֡
* 2�����Ӽ�����̼����ӡ�GPS���ӡ��ջ�����
* 3��ִ������ͼ�Ż�
* 4���õ���ǰ֡�Ż���λ��,λ��Э����
* 5������cloudKeyPoses3D,cloudKeyPoses6D,����transformTobeMapped,���ӵ�ǰ�ؼ�֡�Ľǵ㡢ƽ��㼯��
*/
void saveKeyFramesAndFactor()
{
// ���㵱ǰ֡��ǰһ֡λ�˱任,����仯̫С,����Ϊ�ؼ�֡,��֮��Ϊ�ؼ�֡
if (saveFrame() == false)
return;
// ������̼�����
addOdomFactor();
// GPS����
addGPSFactor();
// �ջ�����
addLoopFactor();
// cout << "****************************************************" << endl;
// gtSAMgraph.print("GTSAM Graph:\n");
// ִ���Ż�
isam->update(gtSAMgraph, initialEstimate);
isam->update();
if (aLoopIsClosed == true)
{
isam->update();
isam->update();
isam->update();
isam->update();
isam->update();
}
// update֮��Ҫ���һ�±��������ͼ,ע:��ʷ���ݲ������,ISAM����������
gtSAMgraph.resize(0);
initialEstimate.clear();
PointType thisPose3D;
PointTypePose thisPose6D;
Pose3 latestEstimate;
// �Ż����
isamCurrentEstimate = isam->calculateEstimate();
// ��ǰ֡λ�˽��
latestEstimate = isamCurrentEstimate.at<Pose3>(isamCurrentEstimate.size()-1);
// cout << "****************************************************" << endl;
// isamCurrentEstimate.print("Current estimate: ");
// cloudKeyPoses3D���뵱ǰ֡λ��
thisPose3D.x = latestEstimate.translation().x();
thisPose3D.y = latestEstimate.translation().y();
thisPose3D.z = latestEstimate.translation().z();
// ����
thisPose3D.intensity = cloudKeyPoses3D->size();
cloudKeyPoses3D->push_back(thisPose3D);
// cloudKeyPoses6D���뵱ǰ֡λ��
thisPose6D.x = thisPose3D.x;
thisPose6D.y = thisPose3D.y;
thisPose6D.z = thisPose3D.z;
thisPose6D.intensity = thisPose3D.intensity ;
thisPose6D.roll = latestEstimate.rotation().roll();
thisPose6D.pitch = latestEstimate.rotation().pitch();
thisPose6D.yaw = latestEstimate.rotation().yaw();
thisPose6D.time = timeLaserInfoCur;
cloudKeyPoses6D->push_back(thisPose6D);
// cout << "****************************************************" << endl;
// cout << "Pose covariance:" << endl;
// cout << isam->marginalCovariance(isamCurrentEstimate.size()-1) << endl << endl;
// λ��Э����
poseCovariance = isam->marginalCovariance(isamCurrentEstimate.size()-1);
// transformTobeMapped���µ�ǰ֡λ��
transformTobeMapped[0] = latestEstimate.rotation().roll();
transformTobeMapped[1] = latestEstimate.rotation().pitch();
transformTobeMapped[2] = latestEstimate.rotation().yaw();
transformTobeMapped[3] = latestEstimate.translation().x();
transformTobeMapped[4] = latestEstimate.translation().y();
transformTobeMapped[5] = latestEstimate.translation().z();
// ��ǰ֡����ǵ㡢ƽ���,����������
pcl::PointCloud<PointType>::Ptr thisCornerKeyFrame(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr thisSurfKeyFrame(new pcl::PointCloud<PointType>());
pcl::copyPointCloud(*laserCloudCornerLastDS, *thisCornerKeyFrame);
pcl::copyPointCloud(*laserCloudSurfLastDS, *thisSurfKeyFrame);
// ���������㽵��������
cornerCloudKeyFrames.push_back(thisCornerKeyFrame);
surfCloudKeyFrames.push_back(thisSurfKeyFrame);
// ������̼ƹ켣
updatePath(thisPose6D);
}
��ʷ������״̬�����Ż��Ľ��������isamCurrentEstimate��,������֡�Ľ����latestEstimate��,����������̼����ӵĺ���Ϊ
void addOdomFactor()
{
if (cloudKeyPoses3D->points.empty())
{
noiseModel::Diagonal::shared_ptr priorNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-2, 1e-2, M_PI*M_PI, 1e8, 1e8, 1e8).finished()); // rad*rad, meter*meter
gtSAMgraph.add(PriorFactor<Pose3>(0, trans2gtsamPose(transformTobeMapped), priorNoise));
initialEstimate.insert(0, trans2gtsamPose(transformTobeMapped));
}else{
noiseModel::Diagonal::shared_ptr odometryNoise = noiseModel::Diagonal::Variances((Vector(6) << 1e-6, 1e-6, 1e-6, 1e-4, 1e-4, 1e-4).finished());
gtsam::Pose3 poseFrom = pclPointTogtsamPose3(cloudKeyPoses6D->points.back());
gtsam::Pose3 poseTo = trans2gtsamPose(transformTobeMapped);
gtSAMgraph.add(BetweenFactor<Pose3>(cloudKeyPoses3D->size()-1, cloudKeyPoses3D->size(), poseFrom.between(poseTo), odometryNoise));
initialEstimate.insert(cloudKeyPoses3D->size(), poseTo);
}
}
����GPS���Ӻ���Ϊ,�����Ը���Щ,��Ҫ�ж��Ƿ�����Լ���ֵ:
void addGPSFactor()
{
if (gpsQueue.empty())
return;
// wait for system initialized and settles down
if (cloudKeyPoses3D->points.empty())
return;
else
{
if (pointDistance(cloudKeyPoses3D->front(), cloudKeyPoses3D->back()) < 5.0)
return;
}
// pose covariance small, no need to correct
if (poseCovariance(3,3) < poseCovThreshold && poseCovariance(4,4) < poseCovThreshold)
return;
// last gps position
static PointType lastGPSPoint;
while (!gpsQueue.empty())
{
if (gpsQueue.front().header.stamp.toSec() < timeLaserInfoCur - 0.2)
{
// message too old
gpsQueue.pop_front();
}
else if (gpsQueue.front().header.stamp.toSec() > timeLaserInfoCur + 0.2)
{
// message too new
break;
}
else
{
nav_msgs::Odometry thisGPS = gpsQueue.front();
gpsQueue.pop_front();
// GPS too noisy, skip
float noise_x = thisGPS.pose.covariance[0];
float noise_y = thisGPS.pose.covariance[7];
float noise_z = thisGPS.pose.covariance[14];
if (noise_x > gpsCovThreshold || noise_y > gpsCovThreshold)
continue;
float gps_x = thisGPS.pose.pose.position.x;
float gps_y = thisGPS.pose.pose.position.y;
float gps_z = thisGPS.pose.pose.position.z;
if (!useGpsElevation)
{
gps_z = transformTobeMapped[5];
noise_z = 0.01;
}
// GPS not properly initialized (0,0,0)
if (abs(gps_x) < 1e-6 && abs(gps_y) < 1e-6)
continue;
// Add GPS every a few meters
PointType curGPSPoint;
curGPSPoint.x = gps_x;
curGPSPoint.y = gps_y;
curGPSPoint.z = gps_z;
if (pointDistance(curGPSPoint, lastGPSPoint) < 5.0)
continue;
else
lastGPSPoint = curGPSPoint;
gtsam::Vector Vector3(3);
Vector3 << max(noise_x, 1.0f), max(noise_y, 1.0f), max(noise_z, 1.0f);
noiseModel::Diagonal::shared_ptr gps_noise = noiseModel::Diagonal::Variances(Vector3);
gtsam::GPSFactor gps_factor(cloudKeyPoses3D->size(), gtsam::Point3(gps_x, gps_y, gps_z), gps_noise);
gtSAMgraph.add(gps_factor);
aLoopIsClosed = true;
break;
}
}
}
���ӻػ����Ӻ���������ʾ:
void addLoopFactor()
{
if (loopIndexQueue.empty())
return;
for (int i = 0; i < (int)loopIndexQueue.size(); ++i)
{
int indexFrom = loopIndexQueue[i].first;
int indexTo = loopIndexQueue[i].second;
gtsam::Pose3 poseBetween = loopPoseQueue[i];
gtsam::noiseModel::Diagonal::shared_ptr noiseBetween = loopNoiseQueue[i];
gtSAMgraph.add(BetweenFactor<Pose3>(indexFrom, indexTo, poseBetween, noiseBetween));
}
loopIndexQueue.clear();
loopPoseQueue.clear();
loopNoiseQueue.clear();
aLoopIsClosed = true;
}
��ô���Ͼͼ�����GTSAM��LIO-SAM�����е�Ӧ��,���ܵû��DZȽϴֲ�,��������������,��Ҳ�ǸոսӴ�GTSAM,�����ӭ��ҽ�����!