һ��MobileNetV1����
ʹ����ȿɷ������������������������硣
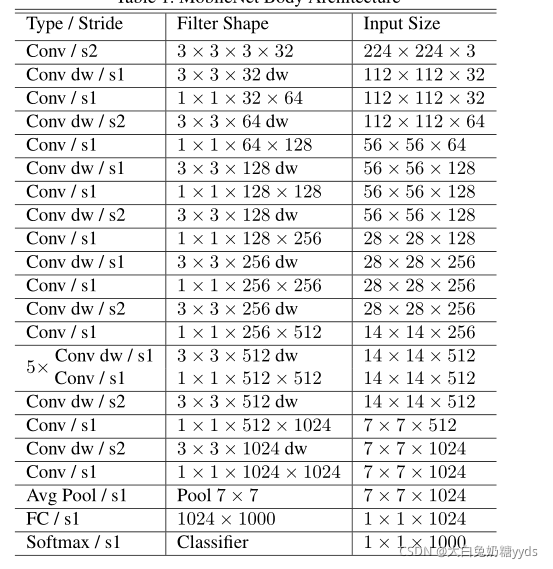
(1)MobileNet��Ҫרע���Ż��ӳ�,��Ҳ�����С�����硣
(2)��ȿɷ������:���������ֽ�Ϊ��Ⱦ�����1��1����(��̬����)����Ⱦ����������˲���Ӧ����ÿ������ͨ��,������Ӧ��1��1�������������Ⱦ������ϡ�
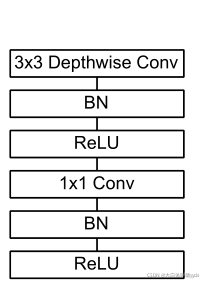
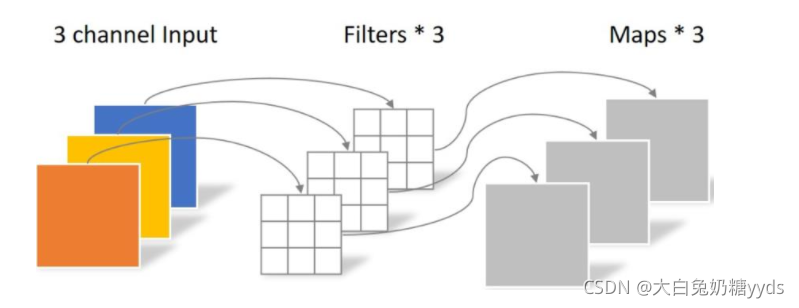
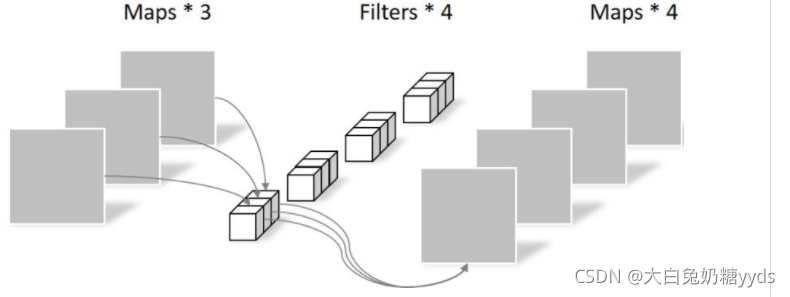
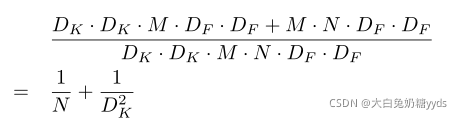
? ? ? ? �������������:���ľ������������һ�������н������˲�����ϳ�һ���µ��������ȿɷ�����������Ϊ����,һ�������˲�,��һ��������ϡ��������Ļ���:DK��DK��M��N��DF��DF(DK:�����˴�С,M����ͨ����,N���ͨ����,DF�������ݿ���)��MobileNetģ��ʹ����ȿɷ���������������ͨ���������ں˴�С֮��������,�仨��ΪDK��DK��M��DF��DF+M��N��DF��DF��
(3)����ṹ���ʵ��:
?
# �Զ��������
class Block(nn.Module):
def __init__(self, in_planes, out_planes, stride=1):
super().__init__()
# �������
self.conv1 = nn.Conv2d(in_planes, in_planes, kernel_size=3, stride=stride, padding=1, groups=in_planes,
bias=False)
self.bn1 = nn.BatchNorm2d(in_planes)
# 1*1����
self.conv2 = nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=1, padding=0, bias=False)
self.bn2 = nn.BatchNorm2d(out_planes)
def forward(self, X):
out = F.relu(self.bn1(self.conv1(X)))
out = F.relu(self.bn2(self.conv2(out)))
return out
#����ģ��
class MobileNetV1(nn.Module):
cfg = [(64, 1), (128, 2), (128, 1), (256, 2), (256, 1), (512, 2), (512, 1),
(1024, 2), (1024, 1)]
def __init__(self, num_classes=10):
super().__init__()
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(32)
self.layers = self._make_layers(in_planes=32)
self.linear = nn.Linear(1024, num_classes)
def _make_layers(self, in_planes):
layers = []
for x in self.cfg:
out_planes = x[0]
stride = x[1]
layers.append(Block(in_planes, out_planes, stride))
in_planes = out_planes
return nn.Sequential(*layers)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.layers(out)
out = F.avg_pool2d(out, 2)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out(4)��������ɱ��ij�����:���ȱ�����(��������ÿһ����ȵر������硣���ڸ����IJ�Ϳ��ȳ�����,����ͨ����M��Ϊ��M,���ͨ����N��Ϊ��N)���ֱ��ʳ�����(����Ӧ��������ͼ��,���ÿ������ڲ���ʾ��ͨ����ͬ�ij�����������),������������Ӱ���ijɱ�DK��DK����M����DF����DF+��M����N����DF����DF
(5)�������ļ���:
����MobileNetV2����
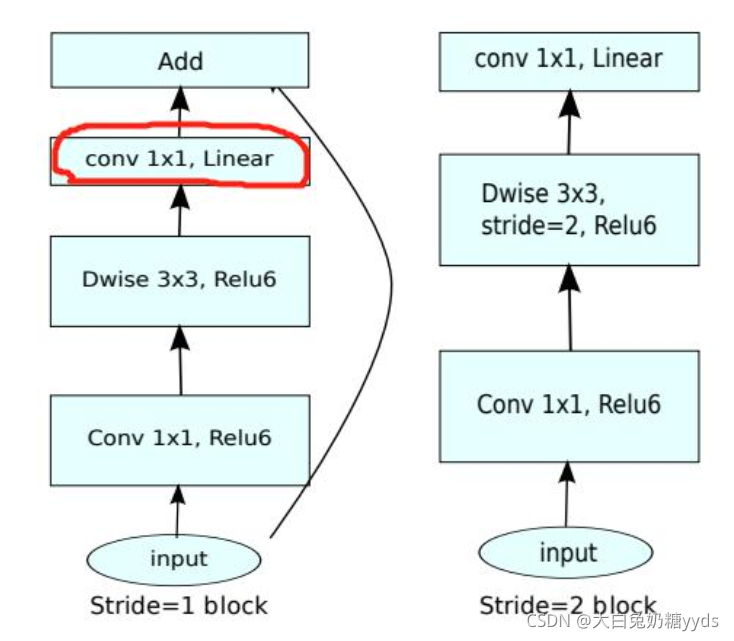
(1)�µIJ�ģ��:������ƿ���ķ���в��ģ�齫��άѹ����ʾ��Ϊ����,���Ƚ�����չ����ά,��ʹ��������Ⱦ������й��ˡ��������ͨ�����Ծ���ͶӰ�ص�ά��ʾ��
(2)�Ķ�:MobileNet V2 ����1x1��������ͨ����,Ȼ����Depthwise 3x3�ľ���,��ʹ��1x1�ľ�����ά;Depthwise����Ƚ�dz,Ӧ��ReLU�������Ϣ��ʧ,����������ReLUȥ���ˡ�
?
?
class Block(nn.Module):
def __init__(self, in_planes, out_planes, expansion,stride=1):
super().__init__()
# �������
self.stride = stride
planes = expansion*in_planes
self.conv1 = nn.Conv2d(in_planes,planes,kernel_size=1,stride=1,padding=0,bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes,planes,kernel_size=3,stride=stride,padding=1,groups=planes,bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes,out_planes,kernel_size=1,stride=1,padding=0,bias=False)
self.bn3 = nn.BatchNorm2d(out_planes)
if stride == 1 and in_planes != out_planes:
self.shorcut = nn.Sequential(
nn.Conv2d(in_planes,out_planes,kernel_size=1,stride=1,padding=0,bias=False),
nn.BatchNorm2d(out_planes)
)
if stride == 1 and in_planes == out_planes:
self.shorcut = nn.Sequential()
def forward(self, X):
out = F.relu(self.bn1(self.conv1(X)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
if self.stride == 1:
return out+self.shorcut(X)
else:
return out
class MobileNetV1(nn.Module):
cfg = [(1, 16, 1, 1),
(6, 24, 2, 1),
(6, 32, 3, 2),
(6, 64, 4, 2),
(6, 96, 3, 1),
(6, 160, 3, 2),
(6, 320, 1, 1)]
def __init__(self, num_classes=10):
super().__init__()
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(32)
self.layers = self._make_layers(in_planes=32)
self.conv2 = nn.Conv2d(320,1280,kernel_size=1,stride=1,padding=0,bias=False)
self.bn2 = nn.BatchNorm2d(1280)
self.linear = nn.Linear(1280, num_classes)
def _make_layers(self, in_planes):
layers = []
for expansion, out_planes, num_blocks, stride in self.cfg:
strides = [stride] + [1] * (num_blocks - 1)
for stride in strides:
layers.append(Block(in_planes, out_planes, expansion, stride))
in_planes = out_planes
return nn.Sequential(*layers)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.layers(out)
out = F.relu(self.bn2(self.conv2(out)))
out = F.avg_pool2d(out, 4)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out����HybridSN �߹���������
ѧϰ����:HybridSN: Exploring 3-D�C2-DCNN Feature Hierarchy for Hyperspectral Image Classification
�߹���ͼ��:�ڹ���ά�Ƚ�����ϸ�µķָ�,�������Ǵ�ͳ�ĺ�,��,����R��G��B������,�����ڹ���ά����Ҳ��N��ͨ��,�������Ի��ͼ����ÿ����Ĺ�������,�����Ի������һ���ε�Ӱ����Ϣ��
���ݼ�:IP(Indian Pines data set)����145��145���ռ�ά�ȵ�ͼ���224��������ΧΪ400��2500 nm�Ĺ��״�,���и�����ˮ�����24�����״��ѱ����������õĵ������౻����Ϊ16��ֲ����
(1)�ڸ߹���ͼ�����ķ������˽:��ʹ�ö�ά������ᵼ��ȱ��ͨ����Ϣ,����ʹ����ά��������ᵼ��ģ���ڸ��ӡ���Ҫԭ����HSI���������,���Ҿ��й��׳ߴ硣����άCNN���ӹ���ά������ȡ�������ñ����������ͼ��
(2)PCA:��ͳ�����ɷַ���,�����״���������D���ٵ�B,ͬʱ������ͬ�Ŀռ�ά��(�����Ⱥ߶�)������ֻ�����˹��ײ���,�����ͱ����˿ռ���Ϣ��
(3)����ṹ:������ά�����㡢һ����ά�����㡢һ��ȫ���Ӳ㡣ǰ���������˳ߴ�Ϊ8��3��3��7��1,16��3��3��5��8,32��3��3��3��16,����16��3��3��5��8��ʾ����8����ά��������ͼ��16��3��3��5ά��ά��(�������ռ�ά��һ������ά)����ά�����˵�ά��Ϊ64��3��3��576(��ʾ����Ϊ576��ͨ���ľ���64��3*3����)��3-D������Ӧ������,���ҿ������������б�������HSI���ݵĹ�����Ϣ����ά�������зֲ�֮ǰӦ��һ��,��Ϊ�������ڲ���ʧ������Ϣ�������ǿ�����ֲ�ͬ���״��ڵĿռ���Ϣ������ṹʵ��:
class HybridSN(nn.Module):
def __init__(self):
super(HybridSN, self).__init__()
self.conv1 = nn.Sequential(nn.Conv3d(1,8,(7,3,3)),
nn.BatchNorm3d(8),
nn.ReLU())
self.conv2 = nn.Sequential(nn.Conv3d(8,16,(5,3,3)),
nn.BatchNorm3d(16),
nn.ReLU())
self.conv3 = nn.Sequential(nn.Conv3d(16,32,(3,3,3)),
nn.BatchNorm3d(32),
nn.ReLU())
self.conv4 = nn.Sequential(nn.Conv2d(576,64,kernel_size=3),
nn.BatchNorm2d(64),
nn.ReLU())
self.net = nn.Sequential(nn.Flatten(),
nn.Linear(18496,256),
nn.ReLU(),
nn.Dropout(0.4),
nn.Linear(256,128),
nn.ReLU(),
nn.Dropout(0.4),
nn.Linear(128,16))
def forward(self,X):
X = self.conv1(X)
X = self.conv2(X)
X = self.conv3(X)
X = X.reshape((-1,576,19,19))
X = self.conv4(X)
X = self.net(X)
return X(4)˼��:��Ϊdropoutÿ�ζ���������Ԫ,���Խ�����в�ͬ,�����ڲ��Ե�ʱ��ȥ���ò㡣