ͼ��ģ��
\qquad ͼ��ģ��Ҳ��ͼ��ƽ������,����Ҫ����ͼ��������Χ����ϴ�ĵ�,��������ֵ����Ϊ����Χ������ֵ���Ƶ�ֵ,��Ŀ����Ҫ������ͼ�������ͱ�Ե�����Ե�ƽ���˲�������Ч����������,��ͬʱ��ʹͼ���е�ϸ�ڲ���ģ��,�������½�,��ͨ�˲�ЧӦ���ԡ�������ƽ���˲�����������ͼ�����������ͬʱ,�Ϻõر���ͼ���ϸ����Ϣ��
��ֵ�˲�
\qquad
��ֵ�˲���ָ�Ե�ǰ��Ϊ���ĵ�,������ΧN
��
\times
��N���������ֵ��ƽ��ֵ�����浱ǰ����������ֵ�����ڼ���ƽ��ֵ��N
��
\times
��N�����Ϊ����,�����˲�����ľ�����С��������ͬ���ٸ�����,һ����СΪ
3
��
3
3\times3
3��3����������ͼ
�������Ϊ:
1
3
��
3
[
1
1
1
1
1
1
1
1
1
]
\frac{1}{3\times3} \quad \left[ \begin{matrix} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \\ \end{matrix} \right]
3��31????111?111?111????
�����ĵ�ľ�ֵ�˲�ֵ=(125+132+124+67+251+123+113+142+102)��9=120,120��251 ���ӽ���Χ��ֵ,������120�滻251��
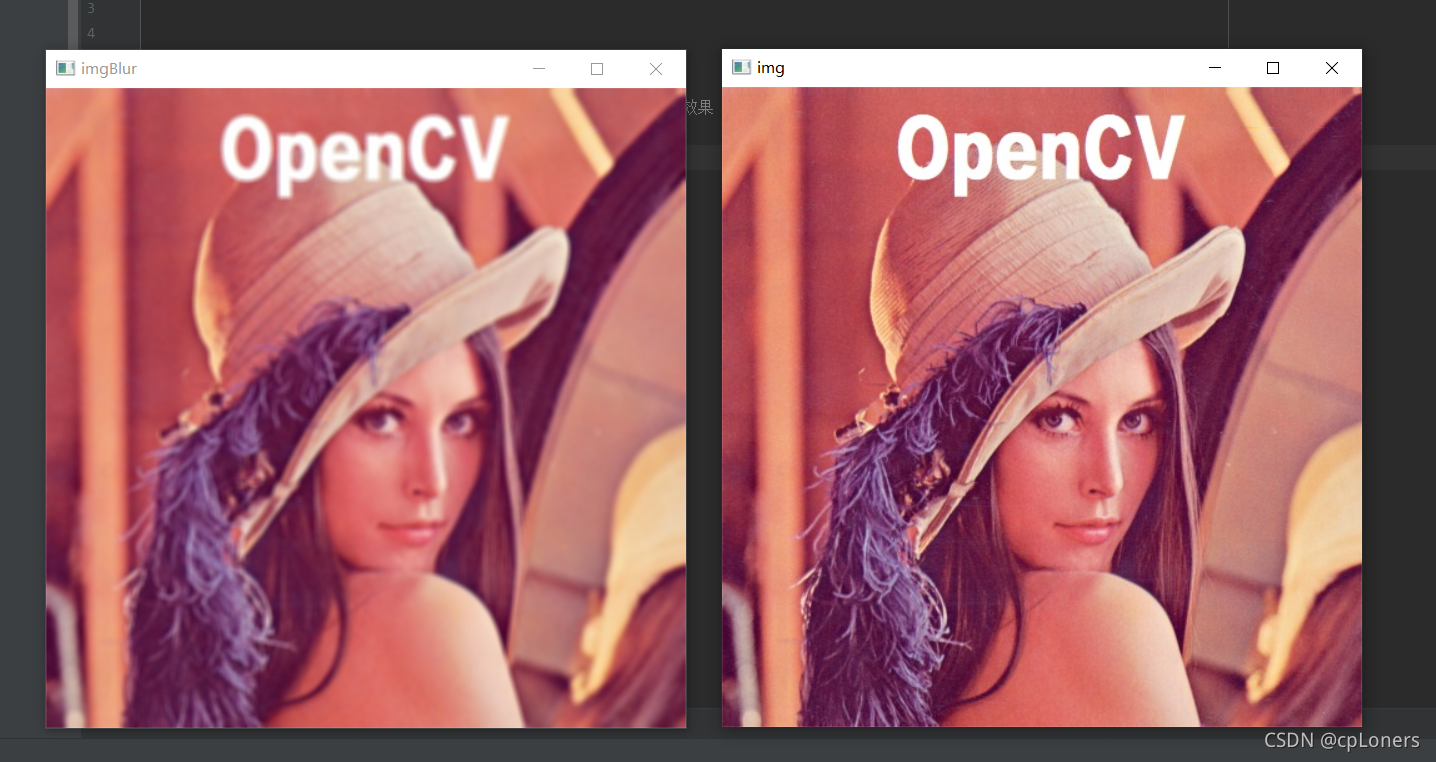
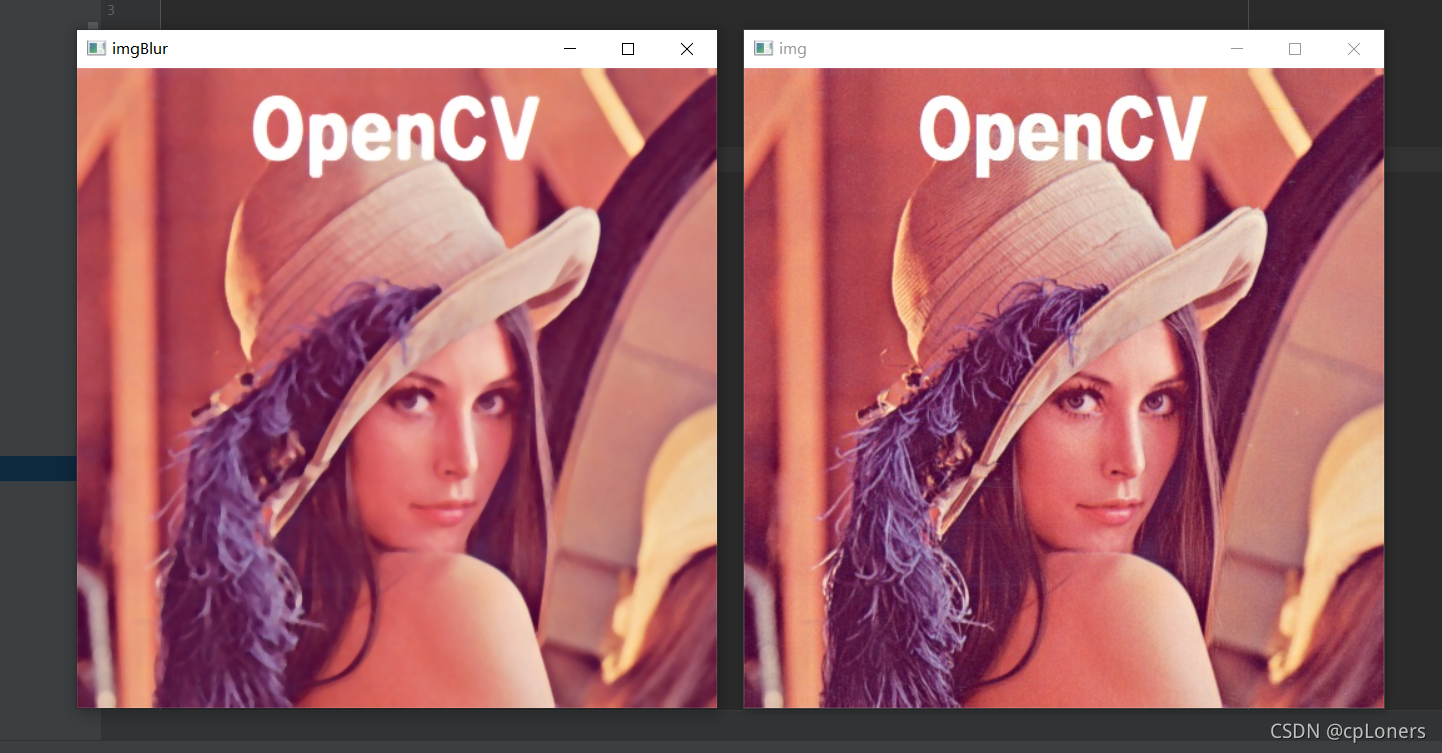
OpenCV �� cv2.blur()��������ʵ�־�ֵ�˲�,�������ʽ����:
dst=cv2.blur(src,ksize [,anchor [,borderType]])
�����˵������:
| ���� | ˵�� |
|---|---|
| dst | Ϊ�˲����ͼ�� |
| src | Ϊԭͼ�� |
| ksize | Ϊ�����˴�С,��ʾΪ(width,height), width �� height ͨ������Ϊ��ֵͬ,��Ϊ���������� |
| anchor | Ϊê��,Ĭ��ֵΪ(-1,-1),��ʾê��λ�ھ��������� |
| borderType | Ϊ�߽�ֵ������ʽ |
import cv2
img = cv2.imread('lena2.jpg')
cv2.imshow('img', img)
img2 = cv2.blur(img, (5, 5)) # �ɵ��������˴�С�鿴��ͬЧ��
cv2.imshow('imgBlur', img2)
cv2.waitKey(0)
��˹�˲�
��˹�˲����ֵ�˲����в�ͬ,�������ص������ĵ�IJ�ͬ����,�������ص㲻ͬ��Ȩ��ֵ,Խ�������ĵ�Ȩ��ֵԽ��,ԽԶ�����ĵ�Ȩ��ֵԽС;Ȼ�����Ȩ��ֵ�����������������ص�ĺ�,������Ϊ���ĵ������ֵ��
���õĸ�˹����������������:
1
16
[
1
2
1
2
4
2
1
2
1
]
\frac{1}{16} \quad \left[ \begin{matrix} 1 & 2 & 1 \\ 2 & 4 & 2\\ 1 & 2 & 1 \\ \end{matrix} \right]
161????121?242?121????
1
273
[
1
4
7
4
1
4
16
26
16
4
7
26
41
26
7
4
16
26
16
4
1
4
7
4
1
]
\frac{1}{273} \quad \left[ \begin{matrix} 1 & 4 & 7&4&1 \\ 4 & 16 & 26&16&4\\ 7 & 26 & 41&26&7 \\ 4 & 16 & 26&16&4\\ 1 & 4 & 7&4&1 \\ \end{matrix} \right]
2731????????14741?41626164?72641267?41626164?14741????????
�����ָ�˹����������ε�������?��ʵ��ͨ����˹�������������,��ʽ����:
G
(
x
,
y
)
=
1
2
��
��
2
e
?
x
2
+
y
2
2
��
2
G(x,y) = \frac{1}{2\pi\sigma^2} \quad e^- \frac{x^2+y^2}{2\sigma^2} \quad
G(x,y)=2����21?e?2��2x2+y2?
��3 �� 3�ĸ�˹������Ϊ��,��ģ�������λ��Ϊ����ԭ�����ȡ����ģ���ڸ���λ�õ�����,������ʾ(x��ˮƽ����,y����ֱ����)��
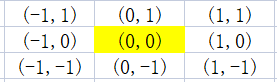
����,������λ�õ�������뵽��˹����G��,�õ���ÿ��ֵ����λ������,�͵õ��˸�˹�����ˡ�
��������ĸ�˹��������������ʽ:
�� С������:ֱ�Ӽ���õ���ֵ,û�о����κδ�����
�� ��������:���õ���ֵ���й�һ������,�������Ͻе�ֵ��һ��Ϊ1,����ÿ��ϵ�����������Ͻǵ�ϵ��,Ȼ��ȡ������ʹ������ģ��ʱ,����Ҫ��ģ���ǰ���һ��ϵ��,��ϵ��Ϊģ��ϵ��֮�͵ĵ�����(����ľ�����������)
����:���ɸ�˹������Ϊ3 �� 3,�� = 0.8��ģ��
С��ģ��:
����ģ��:
�پ����������������ϵ���õ����ս��:
1
16
[
1
2
1
2
4
2
1
2
1
]
\frac{1}{16} \quad \left[ \begin{matrix} 1 & 2 & 1 \\ 2 & 4 & 2\\ 1 & 2 & 1 \\ \end{matrix} \right]
161????121?242?121????
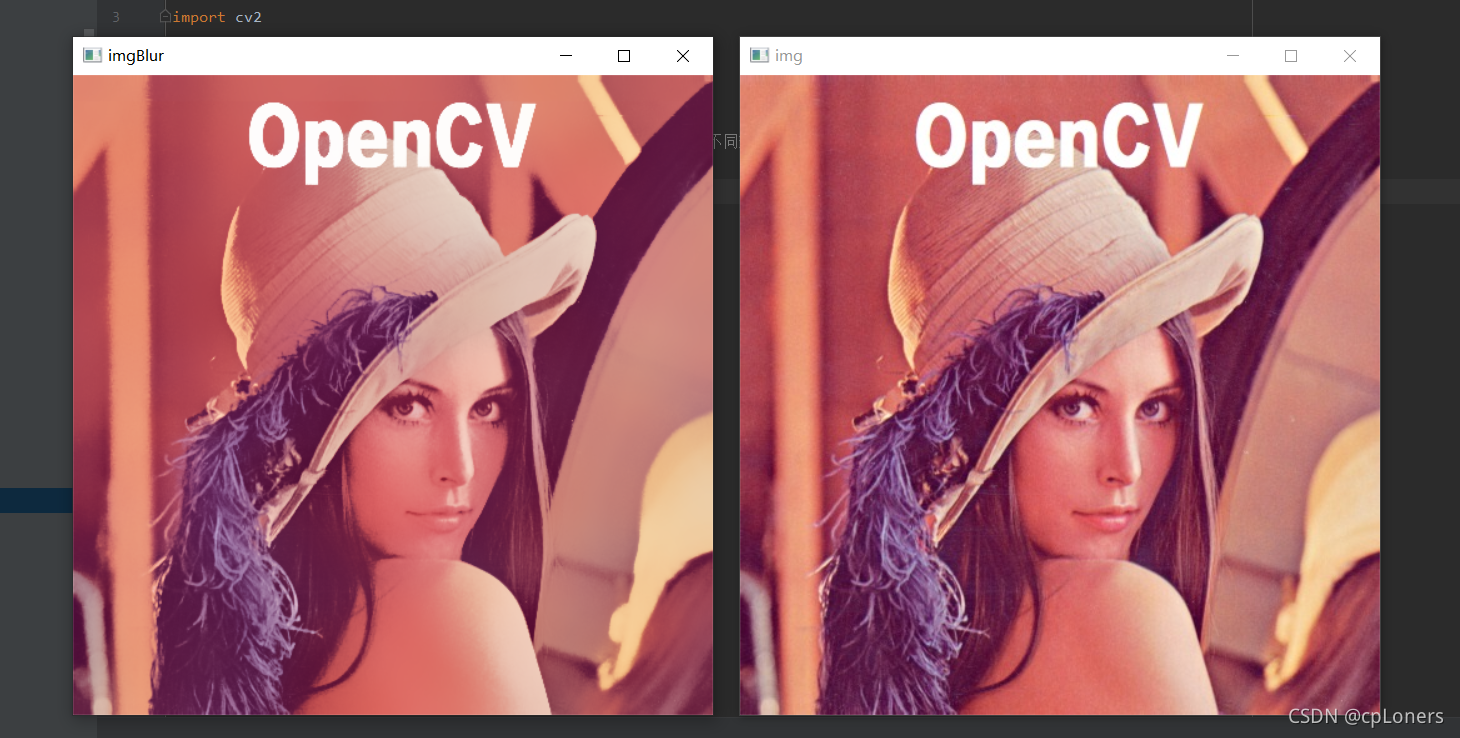
OpenCV �� cv2.GaussianBlur()��������ʵ�ָ�˹�˲�,�������ʽ����:
dst=cv2.GaussianBlur(src,ksize,SigmaX [,sigmaY [,borderType]])
����˵������:
| ���� | ˵�� |
|---|---|
| sigmaX | Ϊˮƽ�����ϵ�Ȩ��ֵ |
| sigmaY | Ϊ��ֱ�����ϵ�Ȩ��ֵ |
| �������� | ����� cv2.blur)�����е�һ�� |
��� sigmaY Ϊ0,��������� sigmaX;���sigmaX �� sigmaY ��Ϊ0,������Ĺ�ʽ������ֵ,���� ksize Ϊ(width,height)��
sigmaX = 0.3��((width-1)��0.5-1)+0.8
sigmar = 0.3��((height-1)��0.5-1)+0.8
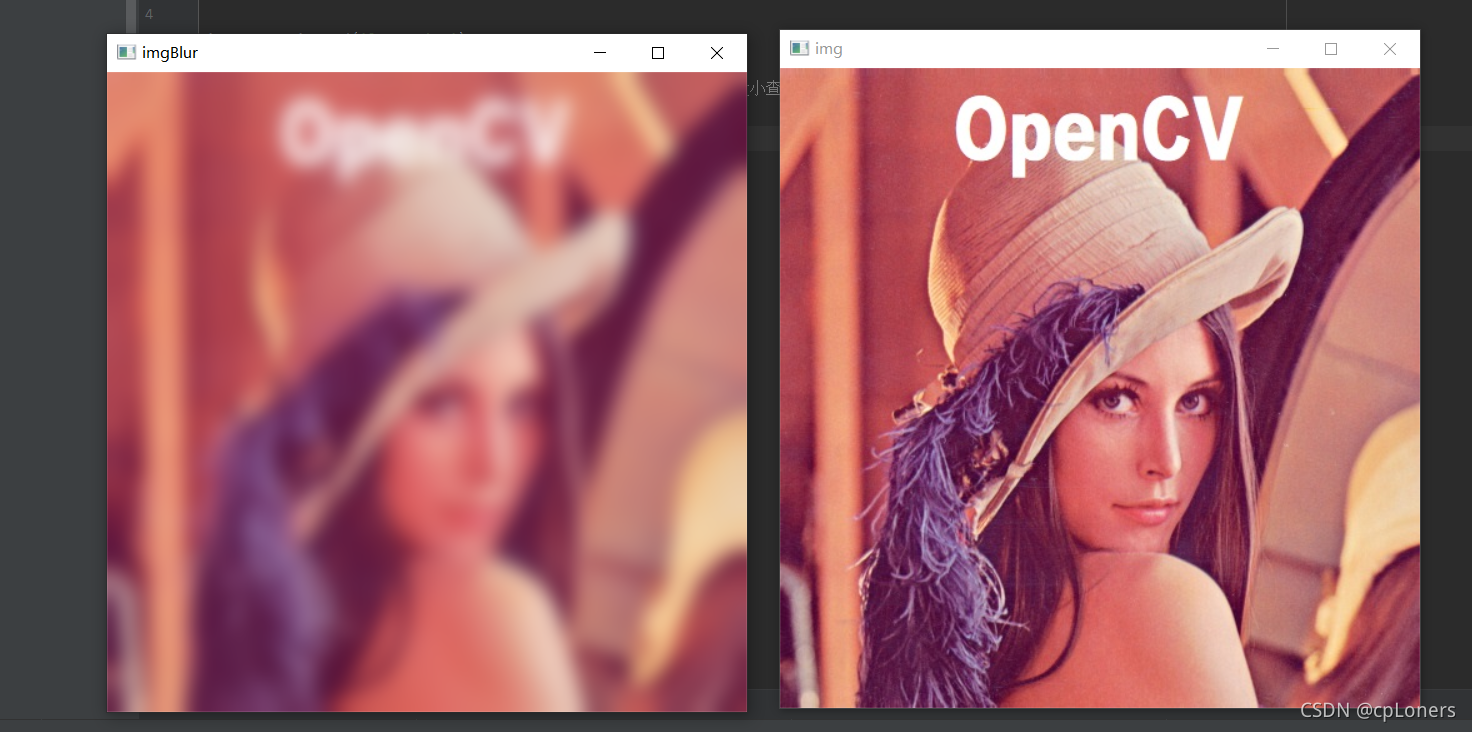
import cv2
img = cv2.imread('lena2.jpg')
cv2.imshow('img', img)
img2 = cv2.GaussianBlur(img, (51, 51), 0, 0) # �ɵ��������˴�С�鿴��ͬЧ��
cv2.imshow('imgBlur', img2)
cv2.waitKey(0)
�����˲�
�����˲��Ծ�ֵ�˲�Ϊ����,��ѡ���Ƿ���˲�������й�һ�������ѡ����й�һ��,���˲����Ϊ�����ڵ������ֵ֮�͵�ƽ��ֵ,�����˲����Ϊ����ֵ֮�͡�
OpencV ��cv2.boxFilter()��������ʵ�ַ����˲�,�������ʽ���¡�
dst=cv2.boxFilter(snc,ddepth,ksize[,anchor[,normalize[,bordertype]]])
�����˵������:
| ���� | ˵�� |
|---|---|
| ddepth | ΪĿ��ͼ������,һ��ʹ��-1 ��ʾ��ԭͼ������һ�� |
| normalize | Ϊ True(Ĭ��ֵ)ʱִ�й�һ������,Ϊ False ʱ��ִ�й�һ������ |
| ������������ | �� cv2.blur()�����е�һ�� |
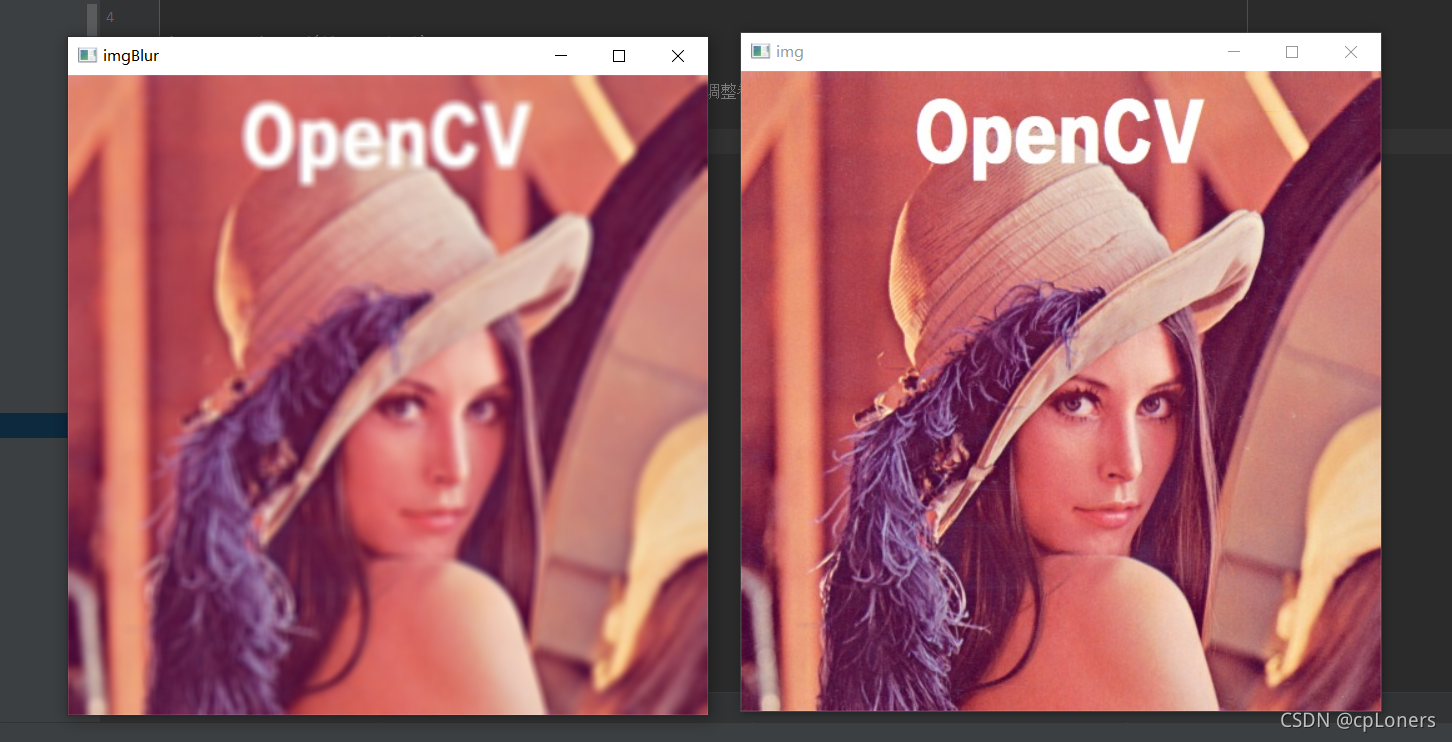
import cv2
img = cv2.imread('lena2.jpg')
cv2.imshow('img', img)
img2 = cv2.boxFilter(img, -1, (7, 7), normalize=True) # �ɵ��������˴�С�鿴��ͬЧ��
cv2.imshow('imgBlur', img2)
cv2.waitKey(0)
��ֵ�˲�
��ֵ�˲��������ڵ���������ֵ����,ȡ�м�ֵ��Ϊ�������ĵ������ֵ�������˼����ʹӵ�в�ͬ���ص��ֵ���������ӽ���������ֵ,��Ϊ�����ij���,ʹ�õ����ر���Χ��������(��)����,��ֵ�˲��Ǹ����˲��õ�ģ��,��ģ���е�����ֵ��С��������,���մ��������صĻҶ�ȡ���ģ���еĻҶȵ���ֵ����һ��������,��ֵ�˲����Կ˷������˲�����������ͼ��ϸ��ģ��,���Ҷ��˳�������ż�����������Ϊ��Ч�����Ƕ�һЩϸ�ڶ�,�ر��ǵ㡢�ߡ��ⶥϸ�ڶ��ͼ�����˲�����ֵ�˲��ķ�����
��ֵ�˲��IJ���
(1)ģ����ͼ������,ģ��������ͼ��ij������λ���غϡ�
(2)��ȡģ���и�����Ӧ����ֵ��
(3)����Щ����ֵ��С�����ų�һ�С�
(4)�ҳ���Щֵ�������м��һ����
(5)������м�ֵ������ǰ��Ӧģ������λ�õ����ء�
OpenCV �� cv2.medianBilur()��������ʵ����ֵ�˲�,�������ʽ���¡�
dst=cv2.medianBlur(src,ksize)
����,ksize ��ʾ�����˴�С,�����Ǵ��� 1 ��������
import cv2
img = cv2.imread('lena2.jpg')
cv2.imshow('img', img)
img2 = cv2.medianBlur(img, 5) # �ɵ��������˴�С�鿴��ͬЧ��
cv2.imshow('imgBlur', img2)
cv2.waitKey(0)
˫���˲�
˫���˲��ڼ�������ֵ��ͬʱ�ῼ�Ǿ����ɫ����Ϣ,�Ӷ���������������ͬʱ������Ե��Ϣ����ִ��˫���˲�����ʱ,������ص��뵱ǰ��ɫ���С,������ϴ��Ȩ��ֵ,���������С��Ȩ��ֵ��
OpenCV �� cv2.bilateralFflter()��������ʵ��˫���˲�,�������ʽ����:
dst=cv2.bilateralFilter(snc,d,sigmacolor,sigmaSpace[,borderType])
�����˵������:
| ���� | ˵�� |
|---|---|
| d | ��ʾ�Ե�ǰ��Ϊ���ĵ������ֱ��,һ��Ϊ 5 |
| sigmaColor | Ϊ˫���˲�ѡ���ɫ�Χ |
| sigmaSpace | Ϊ�ռ������е� sigmaֵ,ֵԽ���ʾԽ������ص�����˲����㡣��d>0ʱ,���� sigmaSpace,��d���������С;����d �� sigmaSpace ����ó�,�� sigmaSpace �ɱ��� |
import numpy as np
import cv2
img = cv2.imread('lena2.jpg')
cv2.imshow('img', img)
img2 = cv2.bilateralFilter(img, 50, 50, 50) # �ɵ��������鿴��ͬЧ��
cv2.imshow('imgBlur', img2)
cv2.waitKey(0)
2D����
��ֵ�˲�����˹�˲��������˲�����ֵ�˲���˫���˲��ȿ���ͨ���������T��������,2D ������ʹ���Զ���ľ�������ִ���˲�������
OpenCV�� cv2.filter2D()��������ʵ�� 2D ����,�������ʽ����:
dst=cv2.filter2D(src,ddepth,kennel[,anchor[,delta[,bondenType]]])
�����˵������:
| ���� | ˵�� |
|---|---|
| ddepth | ��ʾĿ��ͼ�� dst �����,һ��ʹ��-1 ��ʾ��ԭͼ�� SrCһ�� |
| kernel | Ϊ��ͨ��������(һά����)) |
| anchor | Ϊͼ������ê�� |
| delta | Ϊ����ֵ,δʡ��ʱ,�����ϸ�ֵ��Ϊ���յ��˲���� |
| borderType | Ϊ�߽�ֵ������ʽ |
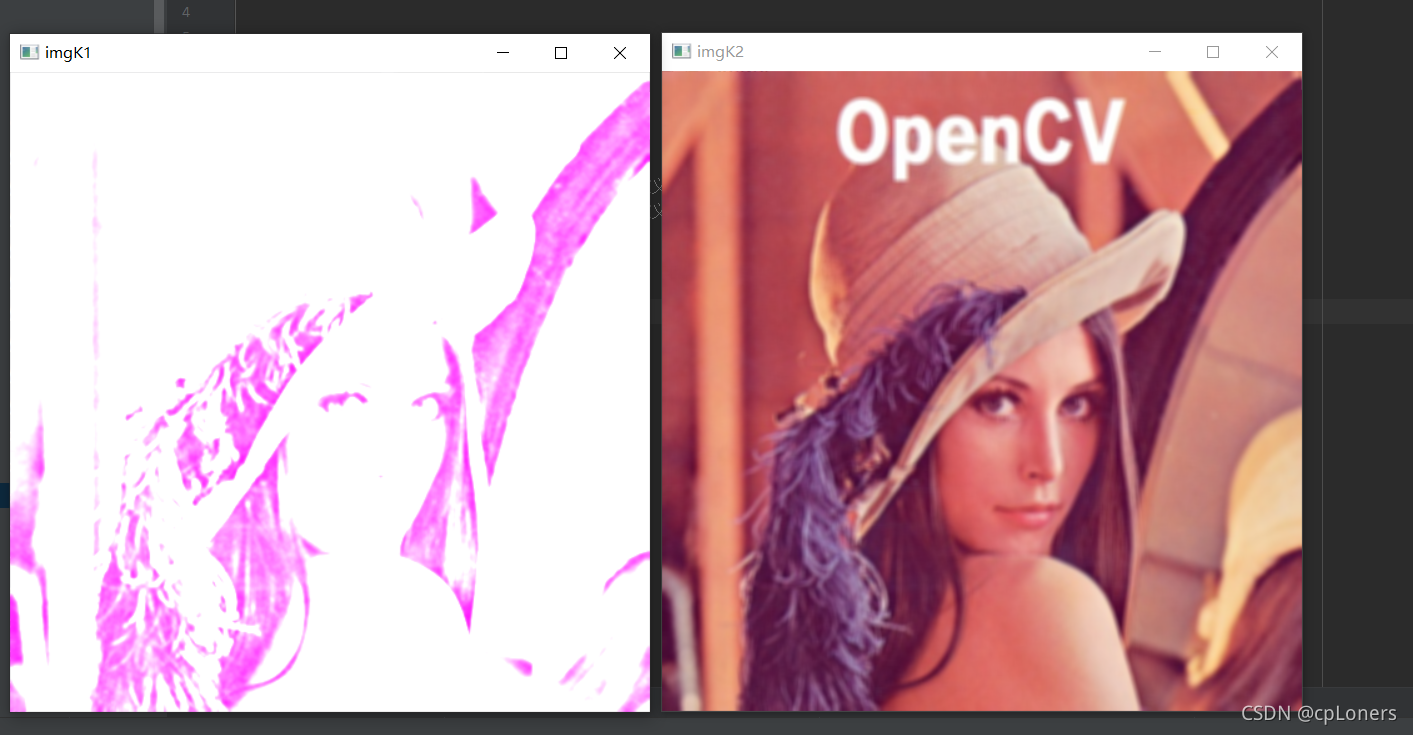
import numpy as np
import cv2
img = cv2.imread('lena2.jpg')
k1 = np.array([[3, 3, 3, 3, 3],
[3, 9, 9, 9, 3],
[3, 11, 12, 13, 3],
[3, 8, 8, 8, 3],
[3, 3, 3, 3, 3], ])/25 # �Զ��������1
k2 = np.ones((5, 5), np.float32)/25 # �Զ��������2
img2 = cv2.filter2D(img, -1, k1)
cv2.imshow('imgK1', img2)
img2 = cv2.filter2D(img, -1, k2)
cv2.imshow('imgK2', img2)
cv2.waitKey(0)