�ڶԿ�ѵ���йؼ�������Ҫ�ҵ��Կ�����,ͨ���Ƕ�ԭʼ����������һ�����Ŷ�������,Ȼ��Ÿ�ģ��ѵ��,����ģ�;�����ʶ��Կ����������������еĹؼ�����������������Ŷ�,ʹ��ģ���ڲ�ͬ�Ĺ��������о��ܹ��߱���ǿ��ʶ����
�Կ�ѵ��,����˵,������ԭʼ��������
x
x
x �ϼ���һ���Ŷ�
r
a
d
v
r_{adv}
radv??(����������ʱ��Ϊ
��
\delta
��),�õ��Կ�������,�������ѵ����2018 �� Madry ��ԶԿ�ѧϰ������һ�� Min-Max �Ĺ�ʽ1,��
m
i
n
��
E
(
x
,
y
)
��
D
[
m
a
x
r
a
d
v
��
S
?
L
(
��
,
x
+
r
a
d
v
,
y
)
]
\underset{\theta}{min}\mathbb E_{(x,y)\sim \mathcal D}[\underset{r_{adv\in S}}{max}\ L(\theta,x+r_{adv},y)]
��min?E(x,y)��D?[radv��S?max??L(��,x+radv?,y)]
�ù�ʽ��������:
- �ڲ���ʧ���������,�Կ���˼�뼴����������ʧ�ķ��������Ŷ�, S S S ����Ϊ�Ŷ��ռ�,��ʱ���ǵ�Ŀ�ľ���������ж�ʧ�������Ŷ���,����ѵĹ�������
- �ⲿ���յ���С��,����ϣ�����Ǹ���������Ŷ���,����ֲ����ܹ���ԭ�ֲ���ͬ,��ʱ���ǵ�Ŀ�ľ������������������������ҵ���³���ģ�Ͳ���
���潫�ֱ���� NLP ���õ���һЩ���öԿ�ѵ���㷨:���������㷨 FGM,һ���Ŷ���ǿ�ಽ�㷨 PGD, FreeAT��YOPO��FreeLB �� SMART
�����ע��,���ڲ�ͬ���㷨�����п��ܲ����˲�ͬ����ѧ����,��ע������
Fast Gradient Method(FGM)
Goodfellow �� 2015 ������� Fast Gradient Sign Method(FGSM)2,�������������ݶ�Ϊ
g
=
��
x
L
(
��
,
x
,
y
)
g=\triangledown_xL(\theta, x, y)
g=��x?L(��,x,y)
��ô�Ŷ��Ϳ���������ʧ�����ķ����ٽ�һ��
r
a
d
v
=
?
?
s
g
n
(
��
x
L
(
��
,
x
,
y
)
)
r_{adv}=\epsilon\cdot sgn(\triangledown_xL(\theta, x, y))
radv?=??sgn(��x?L(��,x,y))
Goodfellow ����,��
?
=
0.25
\epsilon=0.25
?=0.25 ,����Ŷ��ܸ�һ�������������� 99.9% �Ĵ����ʡ����,�� 2017 �� Goodfellow �� FGSM �м����Ŷ��IJ�������һ�����3,ȡ���˷��ź���,���ݶȵĵڶ���ʽ����һ�� scale
r
a
d
v
=
?
?
g
?
/
?
�O
�O
g
�O
�O
2
x
a
d
v
=
x
+
r
a
d
v
r_{adv}=\epsilon\cdot g\ /\ ||g||_2\\ x_{adv}=x+r_{adv}
radv?=??g?/?�O�Og�O�O2?xadv?=x+radv?
"""
����ÿ��x:
1.����x��ǰ��loss�������õ��ݶ�
2.����embedding������ݶȼ����r,���ӵ���ǰembedding��,�൱��x+r
3.����x+r��ǰ��loss,�����õ��Կ����ݶ�,�ۼӵ���һ�����ݶ���
4.��embedding�ָ�Ϊ��һ��ʱ��ֵ
5.���ݵ��������ݶȶԲ������и���
"""
import torch
class FGM():
def __init__(self, model):
self.model = model
self.backup = {}
def attack(self, epsilon=1., emb_name='emb.'):
# emb_name�������Ҫ������ģ����embedding�IJ�����
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
self.backup[name] = param.data.clone()
norm = torch.norm(param.grad)
if norm != 0 and not torch.isnan(norm):
r_at = epsilon * param.grad / norm
param.data.add_(r_at)
def restore(self, emb_name='emb.'):
# emb_name�������Ҫ������ģ����embedding�IJ�����
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
assert name in self.backup
param.data = self.backup[name]
self.backup = {}
# ��Ҫʹ�öԿ�ѵ����ʱ��,ֻ��Ҫ�������д���
# ��ʼ��
fgm = FGM(model)
for batch_input, batch_label in data:
# ����ѵ��
loss = model(batch_input, batch_label)
loss.backward() # ����,�õ�������grad
# �Կ�ѵ��
fgm.attack() # ��embedding�����ӶԿ��Ŷ�
loss_adv = model(batch_input, batch_label)
loss_adv.backward() # ����,����������grad������,�ۼӶԿ�ѵ�����ݶ�
fgm.restore() # �ָ�embedding����
# �ݶ��½�,���²���
optimizer.step()
model.zero_grad()
Project Gradient Descent(PDG)
PGD1 ��һ�ֵ�������,�������ͨ�� FGM ��һ����λ,PGD ѡ��С����,��ε���ÿ����һС��,ÿ�ε������Ὣ�Ŷ�Ͷ�䵽�涨��Χ�ڡ���������߳����Ŷ��뾶Ϊ
e
p
s
i
l
o
n
epsilon
epsilon �Ŀռ�,��ӳ���������,�Ա�֤�Ŷ���Ҫ����
r
a
d
v
t
+
1
=
��
�O
�O
r
a
d
v
�O
�O
F
��
?
(
r
a
d
v
t
+
��
?
g
(
r
a
d
v
t
)
?
/
?
�O
�O
g
(
r
a
d
v
t
)
�O
�O
2
)
g
(
r
a
d
v
t
)
=
��
r
a
d
v
L
(
f
��
(
x
+
r
a
d
v
t
)
,
y
)
r^{t+1}_{adv}=\Pi_{||r_{adv}||_F\leq\epsilon}(r^t_{adv}+\alpha\cdot g(r^t_{adv})\ /\ ||g(r^t_{adv})||_2)\\ g(r^t_{adv})=\triangledown_{r_{adv}}L(f_{\theta}(x+r^t_{adv}), y)
radvt+1?=���O�Oradv?�O�OF?��??(radvt?+��?g(radvt?)?/?�O�Og(radvt?)�O�O2?)g(radvt?)=��radv??L(f��?(x+radvt?),y)
�O
�O
r
a
d
v
�O
�O
F
��
?
||r_{adv}||_F\leq\epsilon
�O�Oradv?�O�OF?��? ���Ŷ���Լ���ռ�,
��
�O
�O
r
a
d
v
�O
�O
F
��
?
\Pi_{||r_{adv}||_F\leq\epsilon}
���O�Oradv?�O�OF?��?? ����
?
\epsilon
?-ball �ϵ�ͶӰ,���Ŷ����ȹ���ʱ,���ǽ� origin �������ص��߽����ͶӰ��,��β������������ڵĶ�ε���

"""
����ÿ��x:
1.����x��ǰ��loss�������õ��ݶȲ�����
����ÿ��t:
2.����embedding������ݶȼ����r,���ӵ���ǰembedding��,�൱��x+r(������Χ��ͶӰ��epsilon��)
3.t�������һ��: ���ݶȹ�0,����x+r����ǰ���õ��ݶ�
4.t�����һ��: �ָ���һ�����ݶ�,��������x+r�����ݶ��ۼӵ���һ����
5.��embedding�ָ�Ϊ��һ��ʱ��ֵ
6.���ݵ��IJ����ݶȶԲ������и���
"""
import torch
class PGD():
def __init__(self, model):
self.model = model
self.emb_backup = {}
self.grad_backup = {}
def attack(self, epsilon=1., alpha=0.3, emb_name='emb.', is_first_attack=False):
# emb_name�������Ҫ������ģ����embedding�IJ�����
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
if is_first_attack:
self.emb_backup[name] = param.data.clone()
norm = torch.norm(param.grad)
if norm != 0 and not torch.isnan(norm):
r_at = alpha * param.grad / norm
param.data.add_(r_at)
param.data = self.project(name, param.data, epsilon)
def restore(self, emb_name='emb.'):
# emb_name�������Ҫ������ģ����embedding�IJ�����
for name, param in self.model.named_parameters():
if param.requires_grad and emb_name in name:
assert name in self.emb_backup
param.data = self.emb_backup[name]
self.emb_backup = {}
def project(self, param_name, param_data, epsilon):
r = param_data - self.emb_backup[param_name]
if torch.norm(r) > epsilon:
r = epsilon * r / torch.norm(r)
return self.emb_backup[param_name] + r
def backup_grad(self):
for name, param in self.model.named_parameters():
if param.requires_grad:
self.grad_backup[name] = param.grad.clone()
def restore_grad(self):
for name, param in self.model.named_parameters():
if param.requires_grad:
param.grad = self.grad_backup[name]
# ʹ�õ�ʱ��,Ҫ�鷳һ��
pgd = PGD(model)
K = 3
for batch_input, batch_label in data:
# ����ѵ��
loss = model(batch_input, batch_label)
loss.backward() # ����,�õ�������grad
pgd.backup_grad()
# �Կ�ѵ��
for t in range(K):
pgd.attack(is_first_attack=(t==0)) # ��embedding�����ӶԿ��Ŷ�, first attackʱ����param.data
if t != K-1:
model.zero_grad()
else:
pgd.restore_grad()
loss_adv = model(batch_input, batch_label)
loss_adv.backward() # ����,����������grad������,�ۼӶԿ�ѵ�����ݶ�
pgd.restore() # �ָ�embedding����
# �ݶ��½�,���²���
optimizer.step()
model.zero_grad()
������,���߸���������ͼ��ʾ�ĶԱ�,���Է������е�һ�Կ����ܵõ�һ���dz����Ҽ��е���ʧֵ�ֲ������,��������,���߳� PGD Ϊһ����ǿ�Կ���Ҳ����˵,ֻҪ�ܸ㶨 PGD �Կ�,���һ�Կ��Ͳ��ڻ���

Free Adversarial Training(FreeAT)
�� FGSM �� PGD,��Ҫ���Ż��Կ��Ŷ��ļ���,��Ȼȡ���˸��õ�Ч��,��������Ҳһ��������
��ͨ�� PGD ����,�ڼ���һ�� epoch ��һ�� batchʱ:
- �ڲ�ѭ������ K ��ǰ�����Ĵ���,�õ� K ������������ݶ�
- ���ѭ������ 1 ��ǰ����Ĵ����õ����ڲ������ݶȸ�������
�����ļ���ɱ���ʮ�ָ߰���,��ʵ,������������������е�һ�������ݶ�ʱ,�ܹ������ɱ��ĵõ�����һ�����ݶȡ������ Free Adversarial Training ��˼��,��һ�μ��������ø������Ϣ���ٶԿ���ѧϰ��ѵ��
FreeAT4 �ĺ�����ͬ�������Ŷ���ģ�Ͳ���,����ͼ��ʾ
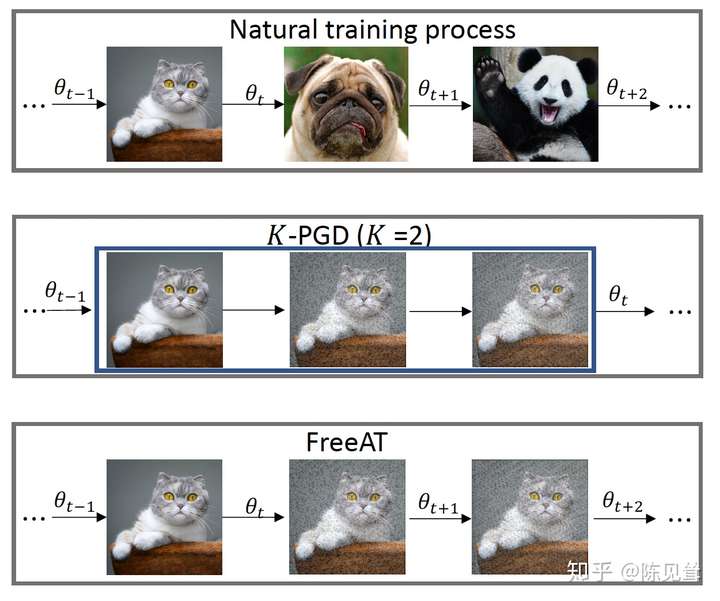
FreeAT ��ÿ���������������ظ��� m m m ��ѵ��,Ϊ�˱�֤�ܵ��ݶȼ����������ͨѵ�����ݶȴ���һ��,��ԭ���� epoch ���� m m m,�������㷨��������ͼ��ʾ

����,���Կ�������,��һ�� minibatch ����ʱ��ʹ����һ�� minibatch ���Ŷ���һ��Ԥ��
YOPO
YOPO5 �ij�����������������Ľṹ�������ݶȼ���ļ��������Ӽ���ֵԭ��PMP(Pontryagin��s maximum principle)����,�Կ��Ŷ�ֻ������ĵ� 0 ���й�,���� embedding ���������Ŷ����ټ�֮,��֮���ǽ���ϵ�,�ǾͲ���Ҫÿ�ζ�����������ǰ����
��������뷨,���߾��븴�ú��漸����ݶ�,���ٷDZ�Ҫ����������������ͼ��ʾ,���Խ� PGD �� r r r �ι������ m �� n m\times n m��n ��
- ������ m m m ����,ÿ��ֻ����һ��ǰ�����
- ÿ�ִ�����,����������ǰ��,�ڽ������ķ����е��� 1 ���ֹͣ,�� p p p ��¼�·����Ľ��;�����ٵ� 0 ���Ͻ��� n n n �ι���,���� YOPO ֻ����� m m m �ε�������������ȴʵ���� m �� n m\times n m��n ���Ŷ��ĸ���

������������һ�� gradient based YOPO �ľ�������

��ͼ���������㷨����

Free Large Batch Adversarial Training( FreeLB)
YOPO ���ź�����,���Ǻþ�����,�ܿ� FreeLB6 ��ָ�� YOPO �ļ������ ReLU-based ������˵�Dz�������,��Ϊ YOPO Ҫ����ʧ�����ο���
����,FreeLB ��Ϊ FreeAT �� PGD �ڻ�ȡ�����Ŷ�ʱ�ļ��㶼�������⡣����,FreeLB �� FreeAT �Ļ����Ͻ�ÿ�� inner-max �и���ģ�Ͳ�����һ��������,����
K
K
K ��֮���ۻ��IJ����ݶȽ��и���(�������㷨�еĵ� 8��13 ����ʾ),�������������Ŀ�꺯���ͼ�Ϊ
m
i
n
��
E
(
Z
,
y
)
��
D
[
1
K
��
t
=
0
K
?
1
m
a
x
��
t
��
I
t
?
L
(
f
��
(
X
+
��
t
)
,
y
)
]
I
t
=
B
X
+
��
0
(
��
t
)
��
B
X
(
?
)
\underset{\theta}{min}\mathbb E_{(Z,y)\sim \mathcal D}\left[\frac{1}{K}\sum_{t=0}^{K-1}\underset{\delta_t\in\mathcal I_t}{max}\ L(f_\theta(X+\delta_t),y)\right]\\ \mathcal I_t=\mathcal B_{X+\delta_0}(\alpha t)\cap\mathcal B_X(\epsilon)
��min?E(Z,y)��D?[K1?t=0��K?1?��t?��It?max??L(f��?(X+��t?),y)]It?=BX+��0??(��t)��BX?(?)
X
+
��
t
X+\delta_t
X+��t? ���Կ���������������Ľ��Ͼֲ����Ľ��ơ�ͬʱ,ͨ���ۻ������ݶȵIJ���,���ǿ��Կ�����������
[
X
+
��
0
,
?
?
,
X
+
��
K
?
1
]
[X+\delta_0,\cdots,X+\delta_{K-1}]
[X+��0?,?,X+��K?1?] ����һ�������
K
K
K ������ batch
(�����湫ʽ����һ��,input subwords �� one-hot representations ��Ϊ Z Z Z,embedding matrix ��Ϊ V V V,subwords embedding ��Ϊ X = V Z X=VZ X=VZ)
���������㷨�е���ѧ����,PGD ��Ҫ���� N e p ? ( K + 1 ) N_{ep}\cdot(K+1) Nep??(K+1) ���ݶȼ���,FreeAT ��Ҫ���� N e p N_{ep} Nep? ��,FreeLB ��Ҫ N e p ? K N_{ep}\cdot K Nep??K �Ρ���Ȼ,FreeLB ��Ч���ϲ�û���ر�������,������Ч��ʮ�ֲ���

����,������ָ���Կ�ѵ���� dropout ����ͬʱʹ��,���� dropout �൱�ڸı�������Ľ��,Ӱ���Ŷ��ļ��㡣���һ��Ҫ���� dropout ����,��Ҫ�� K K K ���ж�ʹ��ͬһ�� mask
SMoothness-inducing Adversarial Regularization(SMART)
֮ǰ���ǿ��������в����������ǻ��� Min-Max ��Ŀ�꺯�� ,������ SMART7 ��ȴ������ Min-Max ��ʽ,ѡ��ͨ�������� Smoothness-inducing Adversarial Regularization ��ɶԿ�ѧϰ��Ϊ�˽������µ�Ŀ�꺯��������������Ż��㷨 Bregman Proximal Point Optimization,����� SMART ��������Ҫ����
SMART ����Ҫ�뷨��ǿ��ģ���� neighboring data points ���������Ƶ�Ԥ��,������������Ŀ�꺯��������ʾ
m
i
n
��
?
F
(
��
)
=
L
(
��
)
+
��
s
R
s
(
��
)
)
L
(
��
)
=
1
n
��
i
=
1
n
?
(
f
(
x
i
;
��
)
,
y
i
)
R
s
(
��
)
=
1
n
��
i
=
1
n
m
a
x
�O
�O
x
~
i
?
x
i
�O
�O
p
��
?
?
?
s
[
f
(
x
~
i
;
��
)
,
f
(
x
i
;
��
)
]
\underset{\theta}{min}\ \mathcal F(\theta)=\mathcal L(\theta)+\lambda_s\mathcal R_s(\theta))\\ \mathcal L(\theta)=\frac{1}{n}\sum_{i=1}^{n}\ell\left(f(x_i;\theta),y_i\right)\\ \mathcal R_s(\theta)=\frac{1}{n}\sum_{i=1}^{n}\underset{||\tilde x_i-x_i||_p\leq\epsilon}{max}\ \ell_s\left[f(\tilde x_i;\theta),f(x_i;\theta)\right]
��min??F(��)=L(��)+��s?Rs?(��))L(��)=n1?i=1��n??(f(xi?;��),yi?)Rs?(��)=n1?i=1��n?�O�Ox~i??xi?�O�Op?��?max???s?[f(x~i?;��),f(xi?;��)]
?
\ell
? �Ǿ����������ʧ����,
x
~
i
\tilde x_i
x~i? �� generated neighbors of training points ,
?
s
\ell_s
?s? �ڷ���������ʹ�öԳƵ� KL ɢ��,��
?
s
(
P
,
Q
)
=
D
K
L
(
P
�O
�O
Q
)
+
D
K
L
(
Q
�O
�O
L
)
\ell_s(P,Q)=\mathcal D_{KL}(P||Q)+D_{KL}(Q||L)
?s?(P,Q)=DKL?(P�O�OQ)+DKL?(Q�O�OL);�ڻع�������ʹ��ƽ����ʧ,
?
s
(
p
,
q
)
=
(
p
?
q
)
2
\ell_s(p,q)=(p-q)^2
?s?(p,q)=(p?q)2
��ʱ���Կ����Կ���������������,�Կ���Ŀ��������Ŷ�ǰ������
Bregman Proximal Point Optimization Ҳ���Կ�����һ��������,��Ŀ������ģ���µ�����һ��,���仰˵���Ƿ�ֹ���µ�ʱ��
��
t
+
1
\theta_{t+1}
��t+1? ��ǰ���
��
t
\theta_t
��t? �仯�����ڵ�
t
+
1
t+1
t+1 �ε���ʱ,���� vanilla Bregman proximal point (VBPP) method
��
t
+
1
=
a
r
g
m
i
n
��
F
(
��
)
+
��
D
B
r
e
g
(
��
,
��
t
)
(2)
\theta_{t+1}=argmin_{\theta}\mathcal F(\theta)+\mu\mathcal D_{Breg}(\theta,\theta_t)\tag{2}
��t+1?=argmin��?F(��)+��DBreg?(��,��t?)(2)
����
D
B
r
e
g
\mathcal D_{Breg}
DBreg? ��ʾ Bregman divergence ����Ϊ
D
B
r
e
g
(
��
,
��
t
)
=
1
n
��
i
=
1
n
?
s
(
f
(
x
i
;
��
)
,
f
(
x
i
;
��
t
)
)
\mathcal D_{Breg}(\theta,\theta_t)=\frac{1}{n}\sum_{i=1}^n\ell_s\left(f(x_i;\theta),f(x_i;\theta_t)\right)
DBreg?(��,��t?)=n1?i=1��n??s?(f(xi?;��),f(xi?;��t?))
?
s
\ell_s
?s? ����������ĶԳ� KL ɢ��
���ǿ���ʹ�ö��������� VBPP,��ʱ����
��
\beta
�� ����,��
��
~
=
(
1
?
��
)
��
t
+
��
��
~
t
?
1
\tilde\theta=(1-\beta)\theta_t+\beta\tilde\theta_{t-1}
��~=(1?��)��t?+����~t?1? ��ʾָ���ƶ�ƽ��,��ô momentum Bregman proximal point (MBPP) method �Ϳ��Ա�ʾΪ
��
t
+
1
=
a
r
g
m
i
n
��
F
(
��
)
+
��
D
B
r
e
g
(
��
,
��
~
t
)
(3)
\theta_{t+1}=argmin_{\theta}\mathcal F(\theta)+\mu\mathcal D_{Breg}(\theta,\tilde\theta_t)\tag{3}
��t+1?=argmin��?F(��)+��DBreg?(��,��~t?)(3)
������ SMART �������㷨����
"""
ע��һ�� Algorithm 1
���� t �ֵ���:
���� theta,��Ϊ Bregman divergence ����� theta_t
����ÿһ�� batch:
ʹ����̬�ֲ������ʼ���Ŷ�,��� x �õ� x_tilde
ѭ�� m С��:
�����Ŷ��µ��ݶ� g_tilde
���� g_tilde ��ѧϰ�ʸ��� x_tilde
���� x_tilde ���¼����ݶ�,���²��� theta
���� theta_t
"""

Reference
��������
- һ�ĸ㶮NLP�еĶԿ�ѵ��FGSM/FGM/PGD/FreeAT/YOPO/FreeLB/SMART
- NLP �� >�Կ�ѧϰ:��FGM, PGD��FreeLB
- �����Ķ�:�Կ�ѵ��(adversarial training)
- ��μ��ٶԿ���������?
- SMART: Robust and Efficient Fine-Tuning for Pre-trained Natural Language��
- SMART: ͨ�öԿ�ʽѵ��
��������
Madry A, Makelov A, Schmidt L, et al. Towards deep learning models resistant to adversarial attacks[J]. arXiv preprint arXiv:1706.06083, 2017. ?? ??
Goodfellow I J, Shlens J, Szegedy C. Explaining and harnessing adversarial examples[J]. arXiv preprint arXiv:1412.6572, 2014. ??
Miyato T, Dai A M, Goodfellow I. Adversarial training methods for semi-supervised text classification[J]. arXiv preprint arXiv:1605.07725, 2016. ??
Shafahi A, Najibi M, Ghiasi A, et al. Adversarial training for free![J]. arXiv preprint arXiv:1904.12843, 2019. ??
Zhang D, Zhang T, Lu Y, et al. You only propagate once: Accelerating adversarial training via maximal principle[J]. arXiv preprint arXiv:1905.00877, 2019. ??
Zhu C, Cheng Y, Gan Z, et al. Freelb: Enhanced adversarial training for natural language understanding[J]. arXiv preprint arXiv:1909.11764, 2019. ??
Jiang H, He P, Chen W, et al. Smart: Robust and efficient fine-tuning for pre-trained natural language models through principled regularized optimization[J]. arXiv preprint arXiv:1911.03437, 2019. ??