ВЮПМзЪСЯ
ЛєЗђБфЛЛжБЯпМьВтдРэ
жБЯпПЩвдБэДяГЩ
y
=
k
x
+
b
y=kx+b
y=kx+bЕФаЮЪН,етЪЧгУаБТЪКЭНиОрБэДяГіРДЕФЁЃвВПЩвдгУЁАЕуЗЈЪНЁБРДБэЪО,БэЪОЮЊ
c
o
s
(
ІШ
)
?
x
+
s
i
n
(
ІШ
)
?
y
=
Іб
cos(ІШ)ЁЄx+sin(ІШ)ЁЄy=Іб
cos(ІШ)?x+sin(ІШ)?y=ІбЕФаЮЪН,ЭЦЕМЙ§ГЬШчСДНгЫљЪО,Цфжа
ІШ
ІШ
ІШДњБэЗЈЯпЗНЯђ,
Іб
Іб
ІбДњБэЗЈЯпОрРыЁЃАДееетжждРэ,НЈСЂвЛИіЖўЮЌЪ§зщ,ШчЯТЭМЫљЪО:
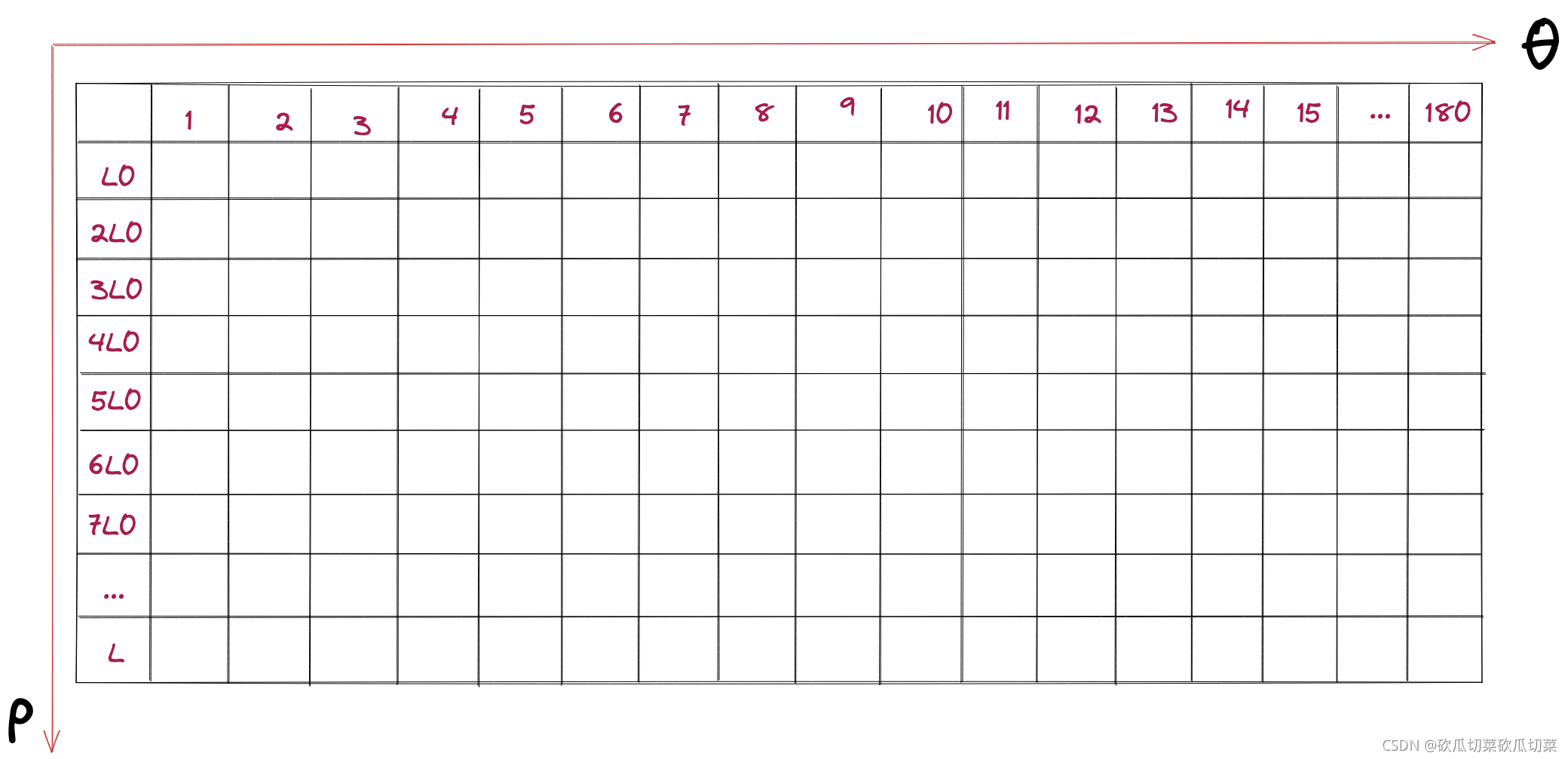
ЦфжаКсжсБэЪОНЧЖШ,НЧЖШМфИєЗДгГжБЯпМьВтЗжБцТЪ,ЭМжаЪЧвд1ЁуЮЊМфИє,ФЧУДжБЯпЕФЗЈЯпНЧЖШжЛФмОЋШЗЕН1Ёу,ШчЙћЯывЊдіМгЗжБцТЪ,ПЩвдЩшжУЮЊЦфЫћМфИєНЧЖШЁЃзнжсБэЪОдЕуОрРыжБЯпЕФЗЈЯпГЄЖШ,РэТлЩЯвЛеХЭМЯёжазюГЄЕФЗЈЯпГЄЖШОЭЪЧЭМЯёЕФЖдНЧЯпГЄЖШ,вђДЫЮвУЧПЩвдИљОнОрРыОЋЖШНјааЗжИю,ШчЩЯЭМЫљЪООрРыОЋЖШЮЊ
L
0
L_0
L0?ЁЃдкНЈСЂКУетИіЪ§зщКѓ,ЮвУЧПЊЪМНјааЛєЗђжБЯпМьВт,Ъ§зщжаУПИідЊЫиОЭЪЧвЛИіРлМгЦї,УПИідЊЫиОљГѕЪМЛЏЮЊ0ЁЃжБЯпМьВтСїГЬШчЯТЭМЫљЪО:
ЕБЭМЯёНјааЭъЖўжЕЛЏжЎКѓ,ЖдУПИіЕуНјааЫбЫї,ШчЙћ
ІШ
ІШ
ІШЕФОЋЖШЮЊ1Ёу,дђДг0ЁуПЊЪМЫбЫї,НЋ
X
ЁЂ
Y
ЁЂ
ІШ
XЁЂYЁЂІШ
XЁЂYЁЂІШжЕДјШыЕНЩЯЪіЕуЗЈЪНжБЯпЗНГЬжа,ПЩвдЫуГіРДвЛИі
Іб
Іб
ІбжЕ,ВЂНЋ
Іб
Іб
ІбжЕАДееОЋЖШЕШМЖМђЛЏ(БШШч
Іб
Іб
ІбЫуГіРДжЕЮЊ6.4,ШчЙћ
Іб
Іб
ІбОЋЖШЮЊ1Ёу,дђздЖЏДІРэЮЊ6)ЁЃетбљ,дкБщРњНЧЖШЕФжБЯпЗЈЯпНЧЖШІШЕФЙ§ГЬжа,ЮвУЧПЩвдЕУЕН180зщаЮШч
(
ІШ
,
Іб
)
(ІШ,Іб)
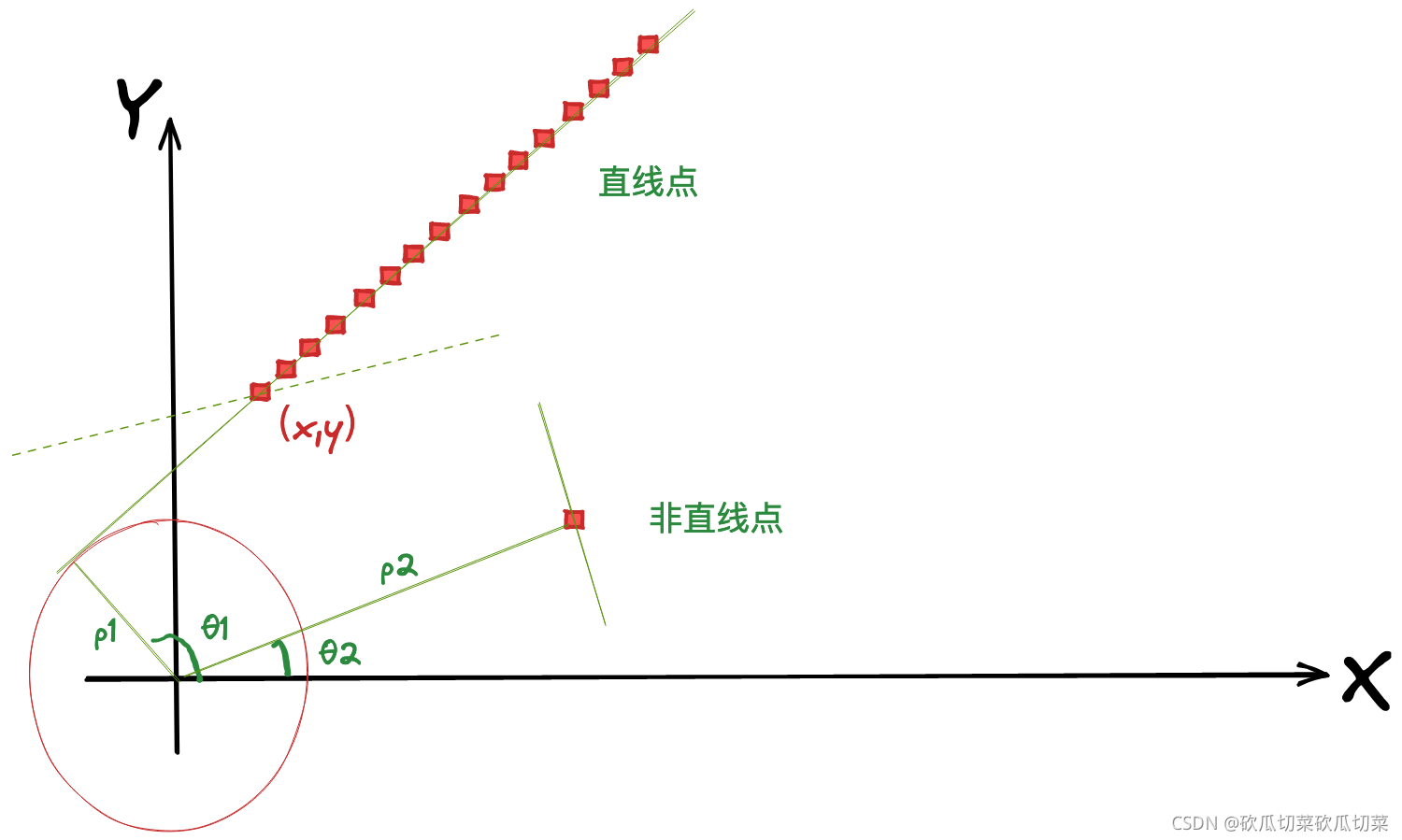
(ІШ,Іб)ЕФЪ§Жд,НЋгыЫќУЧЖдгІЕуЮЛЕФдЊЫиРлМгЦїЦЅХф,ВЂЖдУПИідЊЫиНјаа+1ВйзїЁЃШчЙћетИіЕудквЛЬѕжБЯпЩЯ,етЬѕжБЯпЩЯЕкЖўИіЕудкНјааЩЯЪіВйзїЕФЪБКђ,БиШЛЛсдкБэЪОетЬѕжБЯпЫљЖдгІЕФ
(
ІШ
,
Іб
)
(ІШ,Іб)
(ІШ,Іб)ЮЛжУМЬајРлМг,вдДЫРрЭЦ,дђРлМгЦїЪ§зщжазюДѓдЊЫиЫљЖдгІЕФ
(
ІШ
,
Іб
)
(ІШ,Іб)
(ІШ,Іб)дђБиШЛБэЪОвЛЬѕжБЯп,жСДЫЛєЗђжБЯпМьВтЭъГЩЁЃШчЙћАбУПИіРлМгЦїЕФЪ§жЕБэДяГЩЩюЧГЧПЖШЕФаЮЪН,дђаЇЙћШчЯТЭМЫљЪО:
СНИіССЕуЫљЖдгІЕФ
(
ІШ
,
Іб
)
(ІШ,Іб)
(ІШ,Іб)дђДњБэжБЯпЁЃ
opencvЪЕЯжЛєЗђБфЛЛ
ЩЯУцНщЩмЕФећИіЙ§ГЬЖМБЛOpenCVЗтзАГЩСЫвЛИіКЏЪ§cv2.HoughLines()ЗЕЛижЕОЭЪЧ
(
ІШ
,
Іб
)
(ІШ,Іб)
(ІШ,Іб),
ІШ
ІШ
ІШЕЅЮЛЪЧЛЁЖШЁЂ
Іб
Іб
ІбЕЅЮЛЪЧЯёЫи,дАцЯъЯИЫЕУїШчЯТЭМЫљЪО:
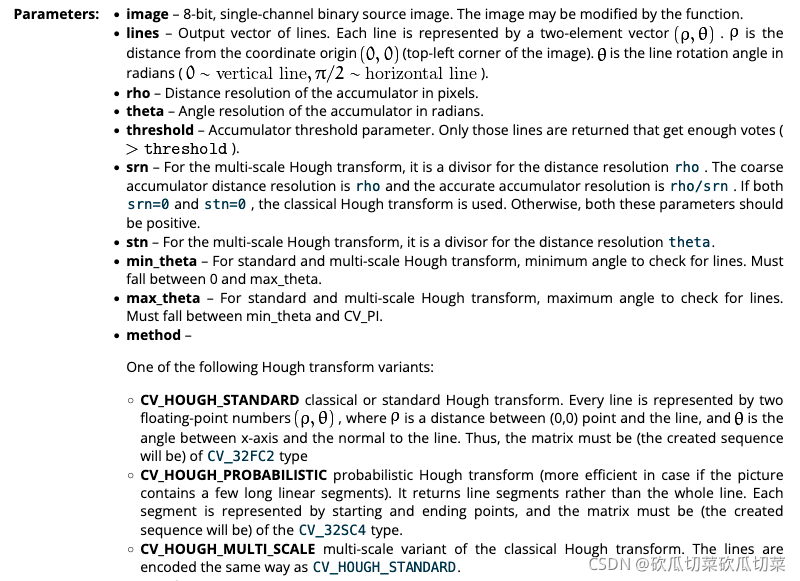
КЏЪ§ВЮЪ§ЕФКЌвхЮЊ:
- image:Д§ДІРэЕФЭМЯё,зЂвтвЛЖЈЪЧЖўжЕЭМЯё;
- lines:жБЯпЕФЪфГіЯђСП,БэДяГЩ ( ІШ , Іб ) (ІШ,Іб) (ІШ,Іб)ЕФаЮЪН(ДЙжБЯп ІШ ІШ ІШЮЊ0,ЫЎЦНЯп ІШ ІШ ІШЮЊІа/2);
- rho:РлМгЦїЕФОрРыЗжБцТЪ,ЕЅЮЛЪЧЯёЫи;
- theta:РлМгЦїЕФНЧЖШЗжБцТЪ,ЕЅЮЛЪЧЛЁЖШ;
- threshold:РлМгЦїЕФуажЕВЮЪ§,РлМгЦїжЛгаЛёЕУзуЙЛЕФРлМгКЭ(РлМгЦїжЕ>threshold)ВХЛсБЛШЯЮЊЪЧжБЯп;
- srn:ЖдгкЖрГпЖШЛєЗђБфЛЛ,етИіВЮЪ§БэЪООрРыЗжБцТЪrhoЕФГ§Ъ§ЁЃдкжДааЙ§ГЬжа,ДжРлМгЗжБцТЪЪЧrho,ЖјИќОЋШЗЕФРлМгЗжБцТЪЪЧrho/srnЁЃШчЙћsrnКЭstnОљЮЊ0,ЯЕЭГВЩгУДЋЭГЕФЛєЗђБфЛЛЫуЗЈЁЃЗёдђ,етСНИіВЮЪ§ОљгІИУЮЊе§Ъ§;
- stn:ЖдгкЖрГпЖШЛєЗђБфЛЛ,етЪЧНЧЖШЗжБцТЪthetaЕФвЛИіГ§Ъ§;
- min_theta:БэЪОЖдгкБъзМКЭЖрГпЖШЛєЗђБфЛЛЖјбдМьВтжБЯпЕФзюаЁНЧЖШ,етИіЪ§жЕБиаыТфдк0КЭmax_thetaжЎМф;
- max_theta:БэЪОЖдгкБъзМКЭЖрГпЖШЛєЗђБфЛЛЖјбдМьВтжБЯпЕФзюДѓНЧЖШ,етИіЪ§жЕБиашТфдкmin_thetaКЭmax_thetaжЎМф;
- method:ДњБэЯТСаЛєЗђБфЛЛЕФБфЬхжЎвЛ:
- CV_HOUGH_STANDARD:ДњБэОЕфЛђБъзМЛєЗђБфЛЛ,УПЬѕЯпгУСНИіИЁЕуЪ§ Іб , ІШ Іб,ІШ Іб,ІШБэЪО,Цфжа Іб Іб ІбБэЪОдЕуКЭетЬѕжБЯпжЎМфЕФОрРы, ІШ ІШ ІШБэЪОДњБэxжсЯпКЭетЬѕжБЯпЗЈЯпжЎМфЕФОрРыЁЃвђДЫ,ОиеѓБиаыЖЈвхЮЊCV_32FC2аЮЪН;
- CV_HOUGH_PROBABILISTIC:ИХТЪЛєЗђБфЛЛЪЧИќгааЇЙћвЛаЉЕФ(ШчЙћЭМЯёАќРЈвЛаЉГЄжБЯпЖЮ)ЁЃНЋЗЕЛижБЯпЖЮЖјВЛЪЧећИіжБЯпЁЃУПЖЮгЩЦ№ЕуКЭжеЕуБэЪО,УПИіОиеѓБиашЮЊCV_32SC4аЮЪН;
- CV_HOUGH_MULTI_SCALE:ЖдОЕфЛєЗђБфЛЛЕФЖрГпЖШБфЬхЁЃжБЯпБрТыБэДяЕФаЮЪНКЭCV_HOUGH_STANDARDЯрЭЌЁЃ
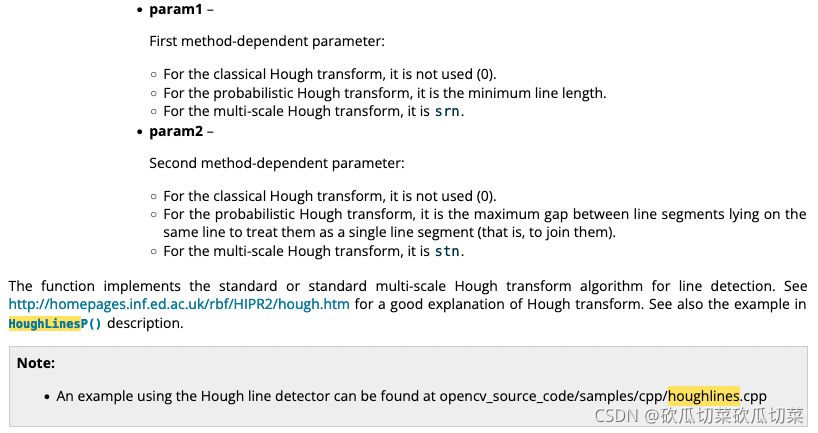
- ПЩбЁВЮЪ§1:ДњБэЕквЛИіПЩбЁЖРСЂВЮЪ§:
- ЖдгкОЕфЛєЗђБфЛЛ,етИіВЮЪ§ЪЧУЛгУЕФ(0);
- ЖдгкИХТЪЛєЗђБфЛЛ,етИіВЮЪ§жЕЪЧзюаЁЯпГЄЖШ;
- ЖдгкЖрГпЖШЛєЗђБфЛЛ,етИіВЮЪ§жЕЪЧsrn;
- ПЩбЁВЮЪ§2:ДњБэЕкЖўИіПЩбЁЖРСЂВЮЪ§:
- ЖдгкОЕфЛєЗђБфЛЛ,етИіВЮЪ§ЪЧУЛгУЕФ(0);
- ЖдгкИХТЪЛєЗђБфЛЛ,етИіДњБэЭЌвЛЬѕжБЯпЩЯЯпЖЮжЎМфЕФзюДѓМфОр,ШчЙћаЁгкетИізюДѓМфОр,СНЬѕЯпНЋБЛЪгЮЊЭЌвЛЬѕжБЯп;
- ЖдгкЖрГпЖШЛєЗђБфЛЛ,етИіВЮЪ§жЕЪЧstn;
змжЎ,УцЯђжБЯпМьВт,БОКЏЪ§ЪЪгУгкБъзМКЭБъзМЖрГпЖШЛєЗђБфЛЛЫуЗЈЁЃ
АИР§ЗжЮі
ЮвУЧХмвЛИіЪЕР§,БШШчЯТУцетеХЬязжИёЕФЭМЦЌ,ЮвУЧЪдЭМАбЬязжИёЕФааСажБЯпШЋВПЬсШЁГіРД,дЭМШчЯТЭМЫљЪО:
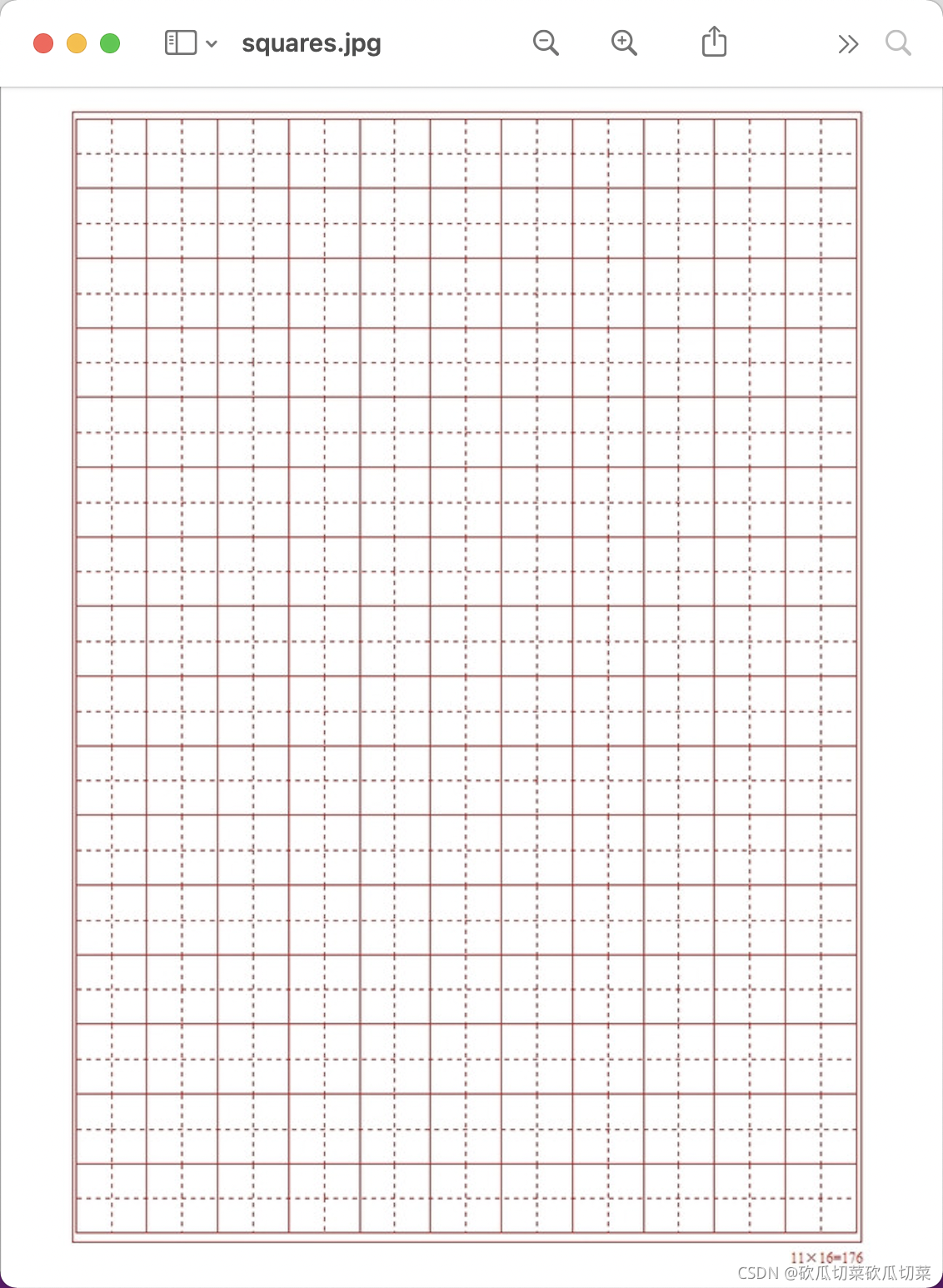
аДвЛИіМђЕЅЕФЛєЗђБфЛЛжБЯпМьВтГЬађ,ДњТыШчЯТЭМЫљЪО:
img = cv2.imread('squares.jpg')
l0 = img.shape
print('l0:', l0[0])
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,200,apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,300)
print('lines', lines[0], type(lines), lines.shape)
for line in lines:
for rho,theta in line:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),3)
self.show_img(edges, 'canny')
self.show_img(img,'results')
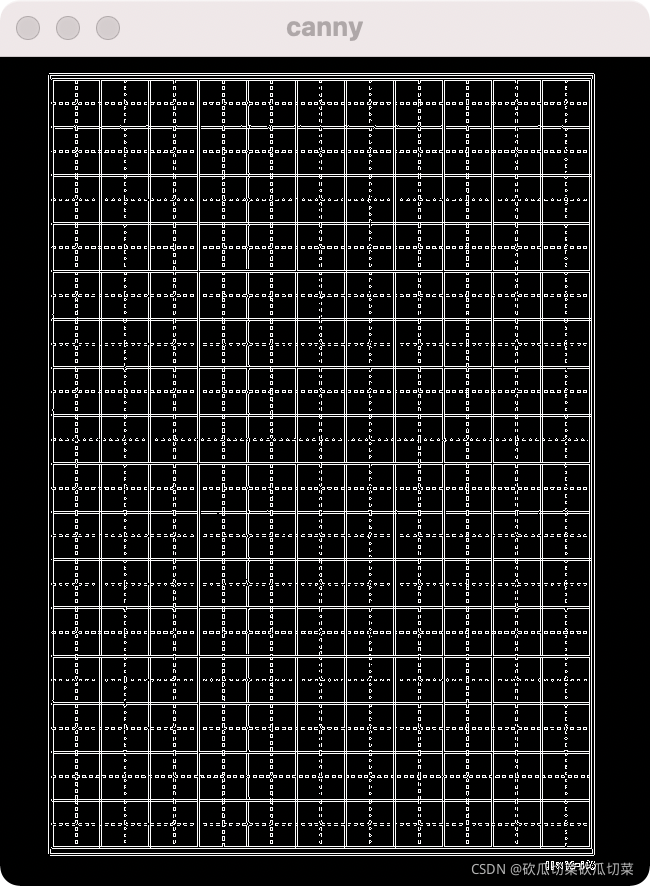
зЂвтЛєЗђБфЛЛКЏЪ§ЕФЪфШывЛЖЈЪЧЖўжЕЭМЯё,ДЫДІЮвУЧРћгУдЭМЕФCannyБпдЕМьВтКЏЪ§ЛђепЭМЦЌЕФБпдЕЭМЯё,CannyБпдЕМьВтаЇЙћШчЯТЭМЫљЪО:
зюжеЛєЗђБфЛЛжБЯпМьВтНсЙћШчЯТЭМЫљЪО:
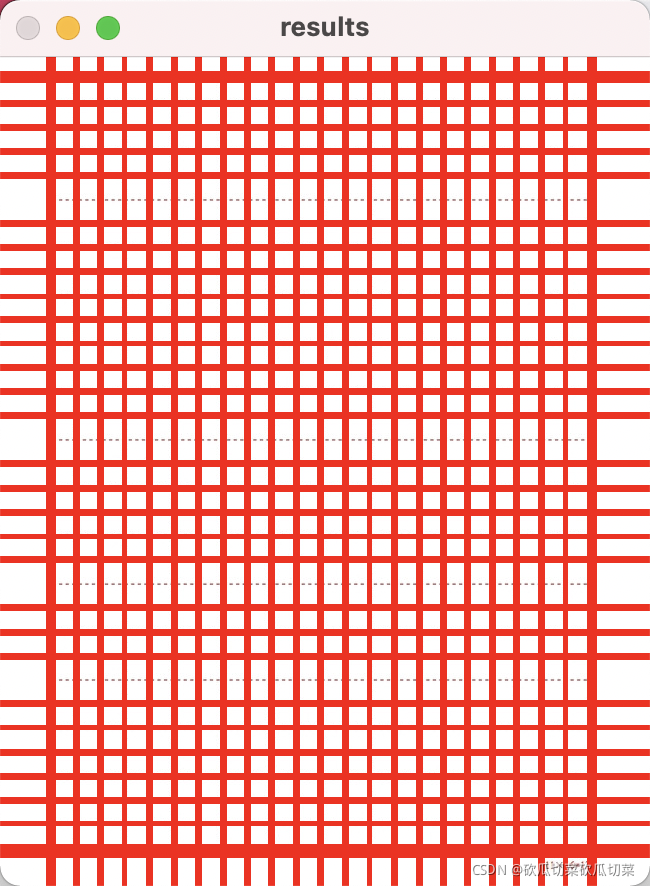
ПЩвдЕїећГЬађжаЕФВПЗжВЮЪ§ИФБфдЫааНсЙћжаЕФжБЯпМфОрЁЂДжЯИЁЂЗжБцТЪЖЯЕуЕШаХЯЂ,ЛЖгДѓМвНјШКЩюШыНЛСїЁЃ
