ROSЛљБОИХФю ЮФМўЯЕЭГ ДДНЈROSШэМўАќ ROSжаЕФвЛаЉУќСю
- ROSЪЧЪВУД
- ROSЮФМўЯЕЭГ
- ДДНЈROS ШэМўАќ
- ROSвЛаЉЛљБОИХФю
- НкЕу:
- ПЭЛЇЖЫПт:
- roscore:
- rosnode:ЛёШЁНкЕуаХЯЂЕФROSЙЄОп
- rosrun:дЫааИјЖЈЕФШэМўАќжаЕФНкЕу
- ROSЛАЬт:НкЕужЎМфЪЧЭЈЙ§вЛИіROSЛАЬтРДЯрЛЅЭЈаХЕФ
- rqt_graph:ЯдЪОЕБЧАдЫааЕФНкЕуКЭЛАЬт
- rostopic:ЛёШЁROSЛАЬтЕФаХЯЂ
- rostopic echo:ЯдЪОдкФГИіЛАЬтЩЯЗЂВМЕФЪ§Он
- rostopic list:СаГіЕБЧАвбБЛЖЉдФКЭЗЂВМЕФЫљгаЛАЬтЁЃ
- ROSЯћЯЂ:ЛАЬтЕФЭЈаХЪЧЭЈЙ§НкЕуМфЗЂЫЭROSЯћЯЂЪЕЯжЕФ
- rostopic type:ВщПДЫљЗЂВМЛАЬтЕФЯћЯЂРраЭ
- rostopic pub:АбЪ§ОнЗЂВМЕНЕБЧАФГИіе§дкЙуВЅЕФЛАЬтЩЯ
- rostopic hz:БЈИцЪ§ОнЗЂВМЕФЫйТЪ
- rqt_plot:дкЙіЖЏЪБМфЭМЩЯЯдЪОЗЂВМЕНФГИіЛАЬтЩЯЕФЪ§Он
- ROSЗўЮё:НкЕужЎМфЭЈбЖЕФСэвЛжжЗНЪН
- rosservice:гааэЖрПЩгУгкЗўЮёЕФУќСю
- rosservice list:ЯдЪОНкЕуЬсЙЉЕФЗўЮё
- rosservice type:ВщПДЗўЮёЕФРраЭ
- rosservice call:ЕїгУЗўЮё
- rosparam:дкROSВЮЪ§ЗўЮёЦїЩЯДцДЂКЭВйзїЪ§Он
- rosparam list:ВщПДВЮЪ§ЗўЮёЦїЩЯЖМгаФФаЉВЮЪ§
- rosparam set:ИФБфВЮЪ§ЗўЮёЦїЩЯВЮЪ§ЕФжЕ
- rosparam get:ВщПДВЮЪ§ЗўЮёЦїЩЯВЮЪ§ЕФжЕ
- rqt_console:СЌНгROSЕФШежОПђМм,ЯдЪОНкЕуЕФЪфГіаХЯЂ
- rqt_logger_level:дкНкЕудЫааЪБИФБфЪфГіаХЯЂЕФЯъЯИМЖБ№
- roslaunch:ЦєЖЏЖЈвхдкlaunch(ЦєЖЏ)ЮФМўжаЕФНкЕу
- launch XMLЮФМўЕФФкШн
- ЪЙгУroslaunch:дЫааlaunchЮФМў
ROSЪЧЪВУД
жаМфМў,СЌНгСЫеце§ЕФВйзїЯЕЭГКЭГЬађ,ЬсЙЉСЫРрЫЦВйзїЯЕЭГЕФЙІФмЁЃ
ЫќЬсЙЉСЫВйзїЯЕЭГгІгаЕФЗўЮё,АќРЈгВМўГщЯѓ,ЕзВуЩшБИПижЦ,ГЃгУКЏЪ§ЕФЪЕЯж,НјГЬМфЯћЯЂДЋЕн,вдМААќЙмРэЁЃ
ROSАќРЈ:ПђМм+ЙЄОп+ЙІФм+ЩчЧј
ПђМм:ЗжВМЪНЁЂНјГЬЙмРэЁЂНјГЬМфЭЈаХ
rosВЩгУЗжВМЪНМмЙЙ,ПЩвдЭЌЪБдЫааЖрИіНјГЬ,УПИіНјГЬПЩвдЕЅЖРЩшМЦ,ВЂЧвзщКЯЦ№РДЁЃ
rosгУНкЕуNodeДњБэНјГЬЁЃ
ЛњЦїШЫПижЦЪЧвЛИіNode,МЄЙтРзДяlaserЪЧвЛИіnodeЁЃrosЬсЙЉСЫвЛЬзПђМмЙмРэетаЉnode,ВЂЧвЬсЙЉЫћУЧжЎМфЯрЛЅЭЈаХЕФЧХСКЁЃ
ЗжВМЪНМмЙЙ,РЉеЙадКУ,ШэМўИДгУТЪИпЁЃШчЙћЛЛвЛИіИпМЖМЄЙтРзДя,жЛгУаоИФНкЕу,ВЛашвЊаоИФЭЈаХЁЃ
ЙЄОп:ЗТецЁЂЪ§ОнПЩЪгЛЏЁЂЭМаЮНчУцЁЂЪ§ОнМЧТМ
ЬсЙЉвЛаЉЙЄОп БШШч:GazeboЁЂRvizЕШ
ЙІФм:ПижЦЁЂЙцЛЎЁЂЪгОѕЁЂНЈЭМ
гавЛаЉЙІФмАќ
ЩчЧј:ШэМўАќЙмРэЁЂЮФЕЕЁЂНЬГЬ
ROSЮФМўЯЕЭГ
ШэМўАќ(Packages):АќЪЧROSДњТыЕФШэМўзщжЏЕЅдЊ,УПИіШэМўАќЖМПЩвдАќКЌГЬађПтЁЂПЩжДааЮФМўЁЂНХБОЛђЦфЫћЙЙМўЁЃ
Manifests (package.xml): ЧхЕЅ(Manifest)ЪЧЖдШэМўАќЕФУшЪіЁЃЫќгУгкЖЈвхШэМўАќжЎМфЕФвРРЕЙиЯЕ,ВЂМЧТМгаЙиШэМўАќЕФдЊаХЯЂ,ШчАцБОЁЂЮЌЛЄепЁЂаэПЩжЄЕШЁЃ
ЮФМўЯЕЭГЙЄОп:rospackЁЂroscdЁЂrosls
1.rospack
rospackЛёШЁШэМўАќЕФгаЙиаХЯЂ,rospack find,ПЩвдЗЕЛиШэМўАќЕФЫљдкТЗОЖЁЃ
гУЗЈ:
$ rospack find [package_name]
Р§зг:
jym@ubuntu:~$ rospack find roscpp
/opt/ros/noetic/share/roscpp
2.roscd
roscdНгЧаЛЛФПТМЕНФГИіШэМўАќЛђепШэМўАќМЏЕБжаЁЃ
Р§зг:
jym@ubuntu:~$ roscd roscpp
jym@ubuntu:/opt/ros/noetic/share/roscpp$
roscdжЛФмЧаЛЛЕНФЧаЉТЗОЖвбОАќКЌдкROS_PACKAGE_PATHЛЗОГБфСПжаЕФШэМўАќЁЃ
ЪЙгУecho $ROS_PACKAGE_PATHВщПДВщПДROS_PACKAGE_PATHжаАќКЌЕФТЗОЖЁЃ
jym@ubuntu:~$ echo $ROS_PACKAGE_PATH
/opt/ros/noetic/share
ДђПЊетИіЮФМўМа,ПЩвдевЕНетаЉАќЁЃ
roscdвВПЩвдЧаЛЛЕНвЛИіШэМўАќЛђШэМўАќМЏЕФзгФПТМжаЁЃ
jym@ubuntu:~$ roscd roscpp/cmake
jym@ubuntu:/opt/ros/noetic/share/roscpp/cmake$ pwd
/opt/ros/noetic/share/roscpp/cmake
3.rosls
дЪаэжБНгАДШэМўАќЕФУћГЦжДаа ls УќСю(ЖјВЛБиЪфШыОјЖдТЗОЖ)ЁЃ
jym@ubuntu:~$ rosls roscpp_tutorials
cmake launch package.xml srv
ДДНЈROS ШэМўАќ
catkinЪЧЪВУД
ДњТыБфГЩПЩжДааЮФМў,НазіБрвы(compile);ЯШБрвыетИі,ЛЙЪЧЯШБрвыФЧИі(МДБрвыЕФАВХХ),НазіЙЙНЈ(build)ЁЃ
catkinЪЧrosЖЈжЦЕФБрвыЙЙНЈЯЕЭГЁЃ
rosДњТыЖМЗХдкcatkin workspaceжа,етИіЙЄзїПеМфашвЊЭЈЙ§жИСюcatkin_makeДДНЈЁЃ
ДДНЈКЭЙЙНЈвЛИіcatkinЙЄзїПеМф:
jym@ubuntu:~$ source /opt/ros/noetic/setup.bash
jym@ubuntu:~$ mkdir -p ~/catkin_ws/src
jym@ubuntu:~$ cd ~/catkin_ws/
jym@ubuntu:~/catkin_ws$ catkin_make
жеЖЫ:
jym@ubuntu:~$ source /opt/ros/noetic/setup.bash
jym@ubuntu:~$ mkdir -p ~/catkin_ws/src
jym@ubuntu:~$ cd ~/catkin_ws/
jym@ubuntu:~/catkin_ws$ catkin_make
Base path: /home/jym/catkin_ws
Source space: /home/jym/catkin_ws/src
Build space: /home/jym/catkin_ws/build
Devel space: /home/jym/catkin_ws/devel
Install space: /home/jym/catkin_ws/install
Creating symlink "/home/jym/catkin_ws/src/CMakeLists.txt" pointing to "/opt/ros/noetic/share/catkin/cmake/toplevel.cmake"
####
#### Running command: "cmake /home/jym/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/jym/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/jym/catkin_ws/install -G Unix Makefiles" in "/home/jym/catkin_ws/build"
####
-- The C compiler identification is GNU 9.3.0
-- The CXX compiler identification is GNU 9.3.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /home/jym/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/noetic
-- This workspace overlays: /opt/ros/noetic
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.10", minimum required is "3")
-- Using PYTHON_EXECUTABLE: /usr/bin/python3
-- Using Debian Python package layout
-- Found PY_em: /usr/lib/python3/dist-packages/em.py
-- Using empy: /usr/lib/python3/dist-packages/em.py
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/jym/catkin_ws/build/test_results
-- Forcing gtest/gmock from source, though one was otherwise available.
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python3 (found version "3.8.10")
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests3
-- catkin 0.8.10
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/jym/catkin_ws/build
####
#### Running command: "make -j2 -l2" in "/home/jym/catkin_ws/build"
####
зюжеПЩвддкHome-catkin_wsжаевЕН:

НгЯТРДsourceвЛЯТаТЩњГЩЕФsetup.*shЮФМў:
$ source devel/setup.bash
вЊБЃжЄЙЄзїЧјБЛАВзАНХБОе§ШЗИВИЧ,ашШЗЖЈROS_PACKAGE_PATHЛЗОГБфСПАќКЌЕБЧАЕФЙЄзїПеМфФПТМ:
$ echo $ROS_PACKAGE_PATH
jym@ubuntu:~/catkin_ws$ source devel/setup.bash
jym@ubuntu:~/catkin_ws$ echo $ROS_PACKAGE_PATH
/home/jym/catkin_ws/src:/opt/ros/noetic/share
catkinШэМўАќЕФНсЙЙ
вЛИіАќвЊЯыГЦЮЊcatkinШэМўАќ,БиаыЗћКЯвдЯТвЊЧѓ:
1.етИіАќБиаыгавЛИіЗћКЯcatkinЙцЗЖЕФpackage.xmlЮФМў
етИіpackage.xmlЮФМўЬсЙЉгаЙиИУШэМўАќЕФдЊаХЯЂ
2.етИіАќБиаыгавЛИіcatkinАцБОЕФCMakeLists.txtЮФМў
ШчЙћЫќЪЧИіCatkinдЊАќЕФЛА,дђашвЊгавЛИіCMakeList.txtЮФМўЕФЯрЙибљАх
3.УПИіАќБиаыгаздМКЕФФПТМ
етвтЮЖзХдкЭЌвЛИіФПТМЯТВЛФмгаЧЖЬзЕФЛђепЖрИіШэМўАќДцдк
my_package/
CMakeLists.txt
package.xml
catkinЙЄзїПеМфжаДцЗХШэМўАќЕФНсЙЙ
workspace_folder/ -- WORKSPACE
src/ -- SOURCE SPACE
CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin
package_1/
CMakeLists.txt -- CMakeLists.txt file for package_1
package.xml -- Package manifest for package_1
...
package_n/
CMakeLists.txt -- CMakeLists.txt file for package_n
package.xml -- Package manifest for package_n
ДДНЈcatkinШэМўАќ-catkin_create_pkg
1.ЧаЛЛЕНИеВХДДНЈЕФПеАзcatkinЙЄзїПеМфжаЕФдДЮФМўПеМфФПТМ
$ cd ~/catkin_ws/src
2.ЪЙгУcatkin_create_pkgУќСюДДНЈвЛИіУћЮЊbeginner_tutorialsЕФаТШэМўАќ,етИіШэМўАќвРРЕгкstd_msgsЁЂroscppКЭrospy
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
жеЖЫ:
jym@ubuntu:~/catkin_ws$ cd ~/catkin_ws/src
jym@ubuntu:~/catkin_ws/src$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
Created file beginner_tutorials/package.xml
Created file beginner_tutorials/CMakeLists.txt
Created folder beginner_tutorials/include/beginner_tutorials
Created folder beginner_tutorials/src
Successfully created files in /home/jym/catkin_ws/src/beginner_tutorials. Please adjust the values in package.xml.
ПЩвдЙлВьЕНЖдгІЕФЮФМўМа:


ЙЙНЈвЛИіcatkinЙЄзїЧјВЂЩњаЇХфжУЮФМў
дкЩЯУцвбОгаНщЩмЙ§ДДНЈКЭЙЙНЈвЛИіcatkinЙЄзїПеМф,ФЧБпжївЊФПЕФЪЧДДНЈвЛИіПеАзЕФcatkinЙЄзїПеМфЁЃ
ЕНСЫетИіЕиЗНжївЊФПЕФЪЧЙЙНЈвЛИіcatkinЙЄзїПеМфЁЃ
1.дкcatkinЙЄзїЧјжаЙЙНЈШэМўАќ
$ cd ~/catkin_ws
$ catkin_make
2.ЙЄзїПеМфЙЙНЈЭъГЩКѓ,вЊНЋетИіЙЄзїПеМфЬэМгЕНROSЛЗОГжа,ашвЊsourceвЛЯТЩњГЩЕФХфжУЮФМў
$ . ~/catkin_ws/devel/setup.bash
jym@ubuntu:~/catkin_ws/src$ cd ~/catkin_ws
jym@ubuntu:~/catkin_ws$ catkin_make
Base path: /home/jym/catkin_ws
Source space: /home/jym/catkin_ws/src
Build space: /home/jym/catkin_ws/build
Devel space: /home/jym/catkin_ws/devel
Install space: /home/jym/catkin_ws/install
####
#### Running command: "cmake /home/jym/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/jym/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/jym/catkin_ws/install -G Unix Makefiles" in "/home/jym/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/jym/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/jym/catkin_ws/devel;/opt/ros/noetic
-- This workspace overlays: /home/jym/catkin_ws/devel;/opt/ros/noetic
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.10", minimum required is "3")
-- Using PYTHON_EXECUTABLE: /usr/bin/python3
-- Using Debian Python package layout
-- Using empy: /usr/lib/python3/dist-packages/em.py
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/jym/catkin_ws/build/test_results
-- Forcing gtest/gmock from source, though one was otherwise available.
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python3 (found version "3.8.10")
-- Using Python nosetests: /usr/bin/nosetests3
-- catkin 0.8.10
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - beginner_tutorials
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'beginner_tutorials'
-- ==> add_subdirectory(beginner_tutorials)
-- Configuring done
-- Generating done
-- Build files have been written to: /home/jym/catkin_ws/build
####
#### Running command: "make -j2 -l2" in "/home/jym/catkin_ws/build"
####
jym@ubuntu:~/catkin_ws$ . ~/catkin_ws/devel/setup.bash
package.xmlЮФМўФкШн
УшЪіБъЧЉ:ФкШнЪЧУшЪіаХЯЂЁЃ
<description>The beginner_tutorials package</description>
ЮЌЛЄепБъЧЉ:ЫќФмЙЛШУЦфЫћШЫСЊЯЕЕНШэМўАќЕФЯрЙиШЫдБЁЃ
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="jym@todo.todo">jym</maintainer>
аэПЩжЄБъЧЉ:аЉГЃМћЕФПЊдДаэПЩавщгаBSDЁЂMITЁЂBoost Software LicenseЁЂGPLv2ЁЂGPLv3ЁЂLGPLv2.1КЭLGPLv3
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
вРРЕЯюБъЧЉ:БъЧЉУшЪіСЫШэМўАќЕФвРРЕЙиЯЕ,етаЉвРРЕЯюЗжЮЊbuild_dependЁЂbuildtool_dependЁЂrun_dependЁЂtest_dependЁЃ
<?xml version="1.0"?>
<package format="2">
<name>beginner_tutorials</name>
<version>0.0.0</version>
<description>The beginner_tutorials package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="jym@todo.todo">jym</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
ПЩвдНсКЯОпЬхЧщПіНјаааоИФ ,аоИФКѓЕФpackage.xml
<?xml version="1.0"?>
<package format="2">
<name>beginner_tutorials</name>
<version>0.1.0</version>
<description>The beginner_tutorials package</description>
<maintainer email="jym@todo.todo">jym</maintainer>
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
ROSвЛаЉЛљБОИХФю
МЦЫуЭМ(Computation Graph)ЪЧвЛИігЩROSНјГЬзщГЩЕФЕуЖдЕуЭјТч,ЫќУЧФмЙЛЙВЭЌДІРэЪ§ОнЁЃ
ROSЕФЛљБОМЦЫуЭМИХФюгаНкЕу(Nodes)ЁЂжїНкЕу(Master)ЁЂВЮЪ§ЗўЮёЦї(Parameter Server)ЁЂЯћЯЂ(Messages)ЁЂЗўЮё(Services)ЁЂЛАЬт(Topics)КЭДќ(Bags),ЫќУЧЖМвдВЛЭЌЕФЗНЪНЯђЭМ(Graph)ЬсЙЉЪ§ОнЁЃ
НкЕу(Nodes):НкЕуЪЧвЛИіПЩжДааЮФМў,ЫќПЩвдЭЈЙ§ROSРДгыЦфЫћНкЕуНјааЭЈаХЁЃ
ЯћЯЂ(Messages):ЖЉдФЛђЗЂВМЛАЬтЪБЫљЪЙгУЕФROSЪ§ОнРраЭЁЃ
ЛАЬт(Topics):НкЕуПЩвдНЋЯћЯЂЗЂВМЕНЛАЬт,ЛђЭЈЙ§ЖЉдФЛАЬтРДНгЪеЯћЯЂЁЃ
жїНкЕу(Master):ROSЕФУќУћЗўЮё,Р§ШчАяжњНкЕуЗЂЯжБЫДЫЁЃ
rosout:дкROSжаЯрЕБгкstdout/stderr(БъзМЪфГі/БъзМДэЮѓ)ЁЃ
roscore:жїНкЕу + rosout + ВЮЪ§ЗўЮёЦїЁЃ
НкЕу:
НкЕуЪЕМЪЩЯжЛВЛЙ§ЪЧROSШэМўАќжаЕФвЛИіПЩжДааЮФМўЁЃROSНкЕуЪЙгУROSПЭЛЇЖЫПтгыЦфЫћНкЕуЭЈаХЁЃНкЕуПЩвдЗЂВМЛђЖЉдФЛАЬт,вВПЩвдЬсЙЉЛђЪЙгУЗўЮёЁЃ
ЛњЦїШЫКЭвЃПиЦїПЊЪМЙЄзїКѓ,ОЭЪЧСНИіНкЕуЁЃЛњЦїШЫЪЧвЛИіНкЕуЁЂвЃПиЦївВЪЧвЛИіНкЕуЁЃ
вЃПиЦїЦ№ЕНСЫЯТДяжИ СюЕФзїгУ;ЛњЦїШЫИКд№МрЬ§вЃПиЦїЯТДяЕФжИСю,ЭъГЩЯргІЖЏзїЁЃ
НкЕуЪЧвЛИіФмжДааЬиЖЈЙЄзїШЮЮёЕФЙЄзїЕЅдЊ,ВЂЧвФмЙЛЯрЛЅЭЈаХ,ДгЖјЪЕЯжвЛИіЛњЦїШЫЯЕЭГећЬхЕФЙІФмЁЃ
ПЭЛЇЖЫПт:
ROSПЭЛЇЖЫПтПЩвдШУгУВЛЭЌБрГЬгябдБраДЕФНкЕуНјааЯрЛЅЭЈаХ:
- rospy = PythonПЭЛЇЖЫПт
- roscpp = C++ПЭЛЇЖЫПт
roscore:
roscore = ros+core:жїНкЕу(ЮЊROSЬсЙЉУќУћЗўЮё) + rosout (stdout/stderr) + ВЮЪ§ЗўЮёЦї
roscoreЪЧФудкдЫааЫљгаROSГЬађЧАЪзЯШвЊдЫааЕФУќСюЁЃ
rosnode:ЛёШЁНкЕуаХЯЂЕФROSЙЄОп
ДђПЊвЛИіаТжеЖЫ,ПЩвдЪЙгУrosnodeПДПДroscoreдЫааЪБИЩСЫаЉЪВУДЁЃ
вЊБЃГжвдЧАЕФжеЖЫПЊзХЁЃ
rosnodeЯдЪОЕБЧАе§дкдЫааЕФROSНкЕуаХЯЂЁЃrosnode listУќСюЛсСаГіетаЉЛюЖЏЕФНкЕуЁЃ
jym@ubuntu:~$ roscore
... logging to /home/jym/.ros/log/13b5ebe2-3581-11ec-8099-99fb076f9407/roslaunch-ubuntu-4683.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:41325/
ros_comm version 1.15.13
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.13
NODES
auto-starting new master
process[master]: started with pid [4694]
ROS_MASTER_URI=http://ubuntu:11311/
setting /run_id to 13b5ebe2-3581-11ec-8099-99fb076f9407
process[rosout-1]: started with pid [4710]
started core service [/rosout]
jym@ubuntu:~$ rosnode list
/rosout
rosoutетИіНкЕугУгкЪеМЏКЭМЧТМНкЕуЕФЕїЪдЪфГі,ЫљвдЫќзмЪЧдкдЫааЕФЁЃ
rosnode infoУќСюЗЕЛиЕФЪЧФГИіжИЖЈНкЕуЕФаХЯЂЁЃ
ПЩвдНјвЛВНВщПДrosoutЕФаХЯЂ, БШШчЫЕЪЕМЪЩЯЫќЪЧЗЂВМСЫвЛИі/rosout_aggЛАЬтЁЃ
jym@ubuntu:~$ rosnode info /rosout
--------------------------------------------------------------------------------
Node [/rosout]
Publications:
* /rosout_agg [rosgraph_msgs/Log]
Subscriptions:
* /rosout [unknown type]
Services:
* /rosout/get_loggers
* /rosout/set_logger_level
contacting node http://ubuntu:45389/ ...
Pid: 4710
rosrun:дЫааИјЖЈЕФШэМўАќжаЕФНкЕу
rosrunПЩвдгУАќУћжБНгдЫааШэМўАќФкЕФНкЕуЁЃ
ПЊвЛИіаТжеЖЫ,дЫааturtlesimАќжаЕФturtlesim_nodeЁЃ
rosrun turtlesim turtlesim_node
ЛсПДЕНturtlesimДАПкЁЃ
дйПЊвЛИіаТжеЖЫ,ЪфШыrosnode list,ЛсПДЕНЯТУцЕФЪфГіаХЯЂ:
jym@ubuntu:~$ rosnode list
/rosout
/turtlesim
ЭЃжЙНкЕу:ЙиБеturtlesimДАПквдЭЃжЙНкЕу(ЛђЛиЕНrosrun turtlesimЕФжеЖЫВЂАДCtrl+C)ЁЃ
ИФБфНкЕуУћГЦ:ЪЙгУжигГЩфВЮЪ§РДИФБфНкЕуУћГЦ:
$ rosrun turtlesim turtlesim_node __name:=my_turtle
ВтЪдНкЕуЪЧЗёе§ГЃдЫаа:ping,РДВтЪдЫќЪЧЗёе§ГЃЁЃ
rosnode ping my_turtle
jym@ubuntu:~$ rosnode ping my_turtle
rosnode: node is [/my_turtle]
pinging /my_turtle with a timeout of 3.0s
xmlrpc reply from http://ubuntu:45307/ time=0.414848ms
xmlrpc reply from http://ubuntu:45307/ time=1.438141ms
xmlrpc reply from http://ubuntu:45307/ time=1.352310ms
xmlrpc reply from http://ubuntu:45307/ time=0.378132ms
xmlrpc reply from http://ubuntu:45307/ time=0.369549ms
xmlrpc reply from http://ubuntu:45307/ time=0.383854ms
xmlrpc reply from http://ubuntu:45307/ time=0.408173ms
^Cping average: 0.677858ms
ROSЛАЬт:НкЕужЎМфЪЧЭЈЙ§вЛИіROSЛАЬтРДЯрЛЅЭЈаХЕФ
Ш§ИіжеЖЫЪфШы:
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
бЁжаturtle_teleop_keyЕФжеЖЫДАПквдШЗБЃАДМќЪфШыФмЙЛБЛВЖЛёЁЃ
ПЩвдЪЙгУМќХЬЩЯЕФЗНЯђМќРДПижЦturtleдЫЖЏСЫЁЃ
turtlesim_nodeНкЕуКЭturtle_teleop_keyНкЕужЎМфЪЧЭЈЙ§вЛИіROSЛАЬтРДЯрЛЅЭЈаХЕФЁЃ
turtle_teleop_keyдкЛАЬтЩЯЗЂВММќХЬАДЯТЕФЯћЯЂ,turtlesimдђЖЉдФИУЛАЬтвдНгЪеЯћЯЂЁЃ
rqt_graph:ЯдЪОЕБЧАдЫааЕФНкЕуКЭЛАЬт
ЪЙгУrqt_graphРДЯдЪОЕБЧАдЫааЕФНкЕуКЭЛАЬтЁЃ
ДђПЊвЛИіаТжеЖЫ:
$ rosrun rqt_graph rqt_graph
ЛсПДЕНвЛИіДАПк:
ШчЙћАбЪѓБъЗХдк/turtle1/command_velocityЩЯЗН,ЯргІЕФROSНкЕу(етРяЪЧРЖЩЋКЭТЬЩЋ)КЭЛАЬт(етРяЪЧКьЩЋ)ОЭЛсИпССЯдЪОЁЃПЩвдПДЕН,turtlesim_nodeКЭturtle_teleop_keyНкЕуе§ЭЈЙ§вЛИіУћЮЊ/turtle1/command_velocityЕФЛАЬтРДЯрЛЅЭЈаХЁЃ

rostopic:ЛёШЁROSЛАЬтЕФаХЯЂ
rostopicУќСюЙЄОпФмШУФуЛёШЁROSЛАЬтЕФаХЯЂЁЃ
ЪЙгУАяжњбЁЯюВщПДПЩгУЕФrostopicЕФзгУќСю
rostopic -h
jym@ubuntu:~$ rostopic -h
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
НгЯТРД,НЋЪЙгУЦфжаЕФвЛаЉзгУќСюРДСЫНтturtlesim
rostopic echo:ЯдЪОдкФГИіЛАЬтЩЯЗЂВМЕФЪ§Он
rostopic echoПЩвдЯдЪОдкФГИіЛАЬтЩЯЗЂВМЕФЪ§ОнЁЃ
ДђПЊаТжеЖЫЪфШы:
rostopic echo /turtle1/cmd_vel
ПЩвдЭЈЙ§АДЯТМќХЬЗНЯђМќШУturtle_teleop_keyНкЕуЗЂВМЪ§ОнЁЃ
ШЛКѓАДЯТЯђЩЯМќЪБПЩвдПДЕН:
jym@ubuntu:~$ rostopic echo /turtle1/cmd_vel
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
ДЫЪБдйПДвЛЯТrqt_graph:

rostopic echoЯждквВЖЉдФСЫturtle1/command_velocityЛАЬтЁЃ
rostopic list:СаГіЕБЧАвбБЛЖЉдФКЭЗЂВМЕФЫљгаЛАЬтЁЃ
rostopic listФмЙЛСаГіЕБЧАвбБЛЖЉдФКЭЗЂВМЕФЫљгаЛАЬтЁЃ
ПЊвЛИіаТжеЖЫ:ВщПДвЛЯТlistзгУќСюашвЊЕФВЮЪ§
rostopic list -h
jym@ubuntu:~$ rostopic list -h
Usage: rostopic list [/namespace]
Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
--host group by host name
дкrostopic listжаЪЙгУverboseбЁЯю:
$ rostopic list -v
ЛсСаГіЫљгаЗЂВМКЭЖЉдФЕФжїЬтМАЦфРраЭЕФЯъЯИаХЯЂЁЃ
jym@ubuntu:~$ rostopic list -v
Published topics:
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /rosout [rosgraph_msgs/Log] 4 publishers
* /turtle1/pose [turtlesim/Pose] 1 publisher
* /turtle1/color_sensor [turtlesim/Color] 1 publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher
Subscribed topics:
* /rosout [rosgraph_msgs/Log] 1 subscriber
* /turtle1/cmd_vel [geometry_msgs/Twist] 2 subscribers
* /statistics [rosgraph_msgs/TopicStatistics] 1 subscriber
ROSЯћЯЂ:ЛАЬтЕФЭЈаХЪЧЭЈЙ§НкЕуМфЗЂЫЭROSЯћЯЂЪЕЯжЕФ
ЛАЬтЕФЭЈаХЪЧЭЈЙ§НкЕуМфЗЂЫЭROSЯћЯЂЪЕЯжЕФЁЃЮЊСЫЪЙЗЂВМеп(turtle_teleop_key)КЭЖЉдФеп(turtulesim_node)НјааЭЈаХ,ЗЂВМепКЭЖЉдФепБиаыЗЂЫЭКЭНгЪеЯрЭЌРраЭЕФЯћЯЂЁЃетвтЮЖзХЛАЬтЕФРраЭЪЧгЩЗЂВМдкЫќЩЯУцЯћЯЂЕФРраЭОіЖЈЕФЁЃЪЙгУrostopic typeУќСюПЩвдВщПДЗЂВМдкЛАЬтЩЯЕФЯћЯЂЕФРраЭЁЃ
rostopic type:ВщПДЫљЗЂВМЛАЬтЕФЯћЯЂРраЭ
rostopic typeУќСюгУРДВщПДЫљЗЂВМЛАЬтЕФЯћЯЂРраЭЁЃ
дЫаа:
$ rostopic type /turtle1/cmd_vel
ПЩвдЪЙгУrosmsgВщПДЯћЯЂЕФЯъЯИаХЯЂ
$ rosmsg show geometry_msgs/Twist
jym@ubuntu:~$ rostopic type /turtle1/cmd_vel
geometry_msgs/Twist
jym@ubuntu:~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
ЯждквбОжЊЕРСЫturtlesimНкЕуЯывЊЕФЯћЯЂРраЭ,ШЛКѓОЭПЩвдЗЂВМУќСюИјturtleСЫЁЃ
rostopic pub:АбЪ§ОнЗЂВМЕНЕБЧАФГИіе§дкЙуВЅЕФЛАЬтЩЯ
rostopic pubПЩвдАбЪ§ОнЗЂВМЕНЕБЧАФГИіе§дкЙуВЅЕФЛАЬтЩЯЁЃ
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
вдЩЯУќСюЛсЗЂЫЭвЛЬѕЯћЯЂИјturtlesim,ИцЫпЫќвд2.0ДѓаЁЕФЯпЫйЖШКЭ1.8ДѓаЁЕФНЧЫйЖШвЦЖЏЁЃ
jym@ubuntu:~$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
publishing and latching message for 3.0 seconds
- rostopic pubУќСюНЋЯћЯЂЗЂВМЕНжИЖЈЕФЛАЬт
- -1 етвЛбЁЯюЛсШУrostopicжЛЗЂВМвЛЬѕЯћЯЂ,ШЛКѓЭЫГі
- /turtle1/cmd_velЪЧвЊЗЂВМЕНЕФЛАЬтЕФУћГЦ
- geometry_msgs/TwistЪЧЗЂВМЕНЛАЬтЪБвЊЪЙгУЕФЯћЯЂЕФРраЭ
- ЈC етвЛбЁЯю(СНИіЦЦелКХ)гУРДИцЫпбЁЯюНтЮіЦї,БэУїжЎКѓЕФВЮЪ§ЖМВЛЪЧбЁЯюЁЃШчЙћВЮЪ§ЧАгаЦЦелКХ(-)БШШчИКЪ§,ФЧУДетЪЧБиашЕФЁЃ
- ШчЧАЫљЪі,вЛИіturtlesim/VelocityЯћЯЂгаСНИіИЁЕуаЭдЊЫи:
linearКЭangularЁЃдкБОР§жа,'[2.0, 0.0, 0.0]'БэЪОlinearЕФжЕЮЊx=2.0,y=0.0,z=0.0,Жј'[0.0, 0.0, 1.8]'ЪЧЫЕangularЕФжЕЮЊx=0.0,y=0.0,z=1.8
етааУќСюЗЂГіКѓ,turtleвЦЖЏСЫвЛЯТОЭЭЃСЫЁЃетЪЧвђЮЊturtleашвЊвЛИіЮШЖЈЕФЦЕТЪЮЊ1HzЕФжИСюСїВХФмБЃГжвЦЖЏзДЬЌЁЃЮвУЧПЩвдЪЙгУrostopic pub -rУќСюРДЗЂВМдДдДВЛЖЯЕФУќСю:
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
НЋвд1 HzЕФЫйЖШЗЂВМvelocityжИСюЕНvelocityЛАЬтЩЯЁЃ
rqt_graphжаЁЃПЩвдПДЕНrostopic pubНкЕуе§дкгыrostopic echoНкЕуНјааЭЈаХ:

аТжеЖЫжаЭЈЙ§rostopic echoУќСюРДВщПДturtlesimЫљЗЂВМЕФЪ§Он:rostopic echo /turtle1/pose
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -1.8
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -1.8
---
rostopic hz:БЈИцЪ§ОнЗЂВМЕФЫйТЪ
rostopic hzБЈИцЪ§ОнЗЂВМЕФЫйТЪЁЃ
ПДвЛЯТturtlesim_nodeЗЂВМ/turtle/poseЕУгаЖрПь:
$ rostopic hz /turtle1/pose
jym@ubuntu:~$ rostopic hz /turtle1/pose
subscribed to [/turtle1/pose]
average rate: 62.521
min: 0.014s max: 0.018s std dev: 0.00067s window: 63
average rate: 62.479
min: 0.014s max: 0.018s std dev: 0.00056s window: 125
average rate: 62.486
min: 0.014s max: 0.018s std dev: 0.00057s window: 188
ПЩвджЊЕР,turtlesimе§вдДѓдМ60HzЕФЦЕТЪЗЂВМгаЙиЮкЙъЕФЪ§ОнЁЃ
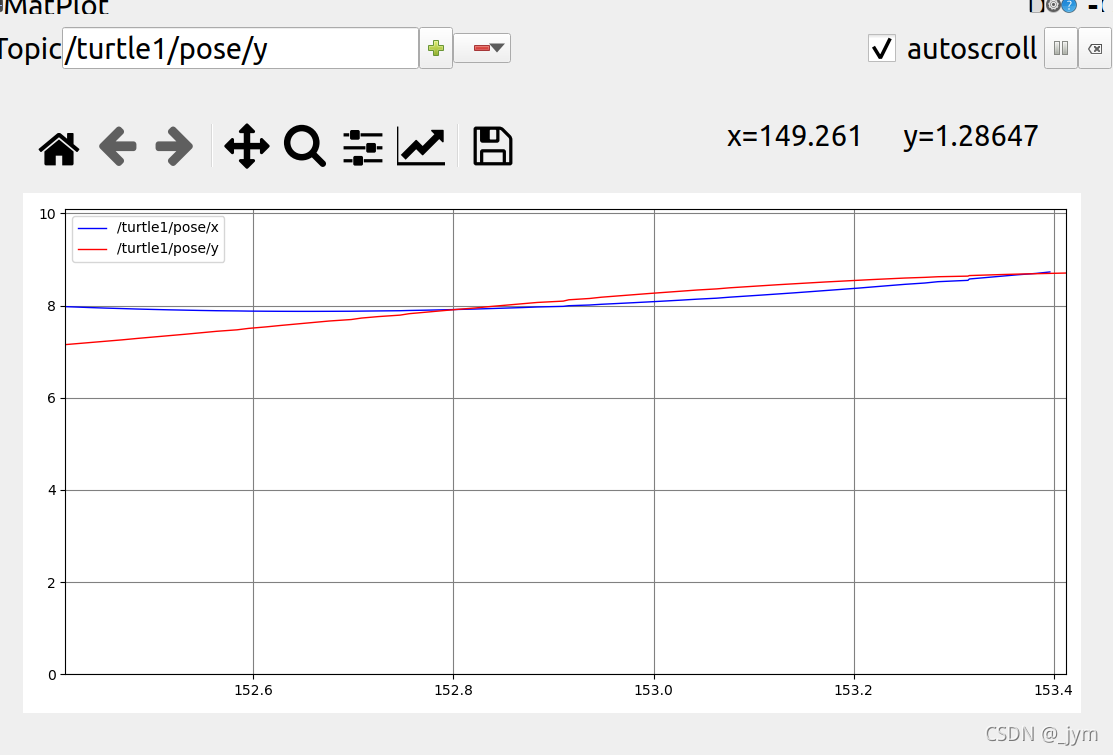
rqt_plot:дкЙіЖЏЪБМфЭМЩЯЯдЪОЗЂВМЕНФГИіЛАЬтЩЯЕФЪ§Он
rqt_plotУќСюПЩвддкЙіЖЏЪБМфЭМЩЯЯдЪОЗЂВМЕНФГИіЛАЬтЩЯЕФЪ§ОнЁЃетРяЮвУЧНЋЪЙгУrqt_plotУќСюРДЛцжЦе§БЛЗЂВМЕН/turtle1/poseЛАЬтЩЯЕФЪ§ОнЁЃ
аТжеЖЫЪфШыrosrun rqt_plot rqt_plot
ПЩвддкзѓЩЯНЧЕФЮФБОПђРяУцЬэМгШЮКЮЯывЊЛцжЦЕФЛАЬтЁЃдкРяУцЪфШы/turtle1/pose/xКѓ,жЎЧАВЛФмАДЯТЕФМгКХАДХЅНЋЛсБфССЁЃАДвЛЯТИУАДХЅ,ВЂЖд/turtle1/pose/yжиИДЯрЭЌЕФЙ§ГЬЁЃЯждкФуЛсдкЭМжаПДЕНturtleЕФx-yЮЛжУЁЃ
ROSЗўЮё:НкЕужЎМфЭЈбЖЕФСэвЛжжЗНЪН
ЗўЮё(Services)ЪЧНкЕужЎМфЭЈбЖЕФСэвЛжжЗНЪНЁЃЗўЮёдЪаэНкЕуЗЂЫЭвЛИіЧыЧѓ(request)ВЂЛёЕУвЛИіЯьгІ(response)ЁЃ
rosservice:гааэЖрПЩгУгкЗўЮёЕФУќСю
rosserviceПЩвдКмШнвзЕиЭЈЙ§ЗўЮёИНМгЕНROSПЭЛЇЖЫ/ЗўЮёЦїПђМмЩЯЁЃrosserviceгааэЖрПЩгУгкЗўЮёЕФУќСю,ШчЯТЫљЪО:
rosservice list ЪфГіЛюдОЗўЮёЕФаХЯЂ
rosservice call гУИјЖЈЕФВЮЪ§ЕїгУЗўЮё
rosservice type ЪфГіЗўЮёЕФРраЭ
rosservice find АДЗўЮёЕФРраЭВщевЗўЮё
rosservice uri ЪфГіЗўЮёЕФROSRPC uri
rosservice list:ЯдЪОНкЕуЬсЙЉЕФЗўЮё
jym@ubuntu:~$ rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
rosservice type:ВщПДЗўЮёЕФРраЭ
ЪЙгУrosservice typeУќСюНјвЛВНВщПДclear(ЧхГ§)ЗўЮё:
jym@ubuntu:~$ rosservice type /clear
std_srvs/Empty
ЗўЮёЕФРраЭЮЊempty(Пе),етБэУїЕїгУетИіЗўЮёЪБВЛашвЊВЮЪ§(МД,ЫќдкЗЂГіЧыЧѓЪБВЛЗЂЫЭЪ§Он,дкНгЪеЯьгІЪБвВВЛНгЪеЪ§Он)ЁЃ
ВщПДгаВЮЗўЮё:
$ rosservice type /spawn | rossrv show
jym@ubuntu:~$ rosservice type /spawn | rossrv show
float32 x
float32 y
float32 theta
string name
---
string name
етИіЗўЮёФмШУЮвУЧПЩвддкИјЖЈЕФЮЛжУКЭНЧЖШЩњГЩвЛжЛаТЕФЮкЙъЁЃnameзжЖЮЪЧПЩбЁЕФЁЃ
rosservice call:ЕїгУЗўЮё
ЕїгУЮоВЮЗўЮё:
$ rosservice call /clear
ЧхГ§СЫturtlesim_nodeБГОАЩЯЕФЙьМЃЁЃ
ЕїгУгаВЮЗўЮё:
jym@ubuntu:~$ rosservice call /spawn 2 2 2 ""
name: "turtle2"
ИУЕїгУЗЕЛиСЫаТВњЩњЕФЮкЙъЕФУћзжЁЃШЛКѓturtlesimРяУцГіЯжСЫИіаТЮкЙъЁЃ
rosparam:дкROSВЮЪ§ЗўЮёЦїЩЯДцДЂКЭВйзїЪ§Он
rosparamФмдкROSВЮЪ§ЗўЮёЦї(Parameter Server)ЩЯДцДЂКЭВйзїЪ§ОнЁЃВЮЪ§ЗўЮёЦїФмЙЛДцДЂећаЭ(integer)ЁЂИЁЕу(float)ЁЂВМЖћ(boolean)ЁЂзжЕф(dictionaries)КЭСаБэ(list)ЕШЪ§ОнРраЭЁЃ
rosparamЪЙгУYAMLБъМЧгябдЕФгяЗЈЁЃвЛАуЖјбд,YAMLЕФБэЪіКмздШЛ:1ЪЧећаЭ,1.0ЪЧИЁЕуаЭ,oneЪЧзжЗћДЎ,trueЪЧВМЖћаЭ,[1, 2, 3]ЪЧећаЭзщГЩЕФСаБэ,{a: b, c: d}ЪЧзжЕфЁЃ
rosparamгаКмЖрУќСюПЩвдгУРДВйзїВЮЪ§,ШчЯТЫљЪО:
rosparam set ЩшжУВЮЪ§
rosparam get ЛёШЁВЮЪ§
rosparam load ДгЮФМўжаМгдиВЮЪ§
rosparam dump ЯђЮФМўжазЊДЂВЮЪ§
rosparam delete ЩОГ§ВЮЪ§
rosparam list СаГіВЮЪ§Ућ
rosparam list:ВщПДВЮЪ§ЗўЮёЦїЩЯЖМгаФФаЉВЮЪ§
jym@ubuntu:~$ rosparam list
/rosdistro
/roslaunch/uris/host_ubuntu__36577
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
rosparam set:ИФБфВЮЪ§ЗўЮёЦїЩЯВЮЪ§ЕФжЕ
аоИФБГОАбеЩЋЕФКьЩЋЭЈЕРжЕ:
$ rosparam set /turtlesim/background_r 150
ЩЯЪіжИСюаоИФСЫВЮЪ§ЕФжЕ,ЯждкЮвУЧашвЊЕїгУclearЗўЮёЪЙЕУВЮЪ§ЕФаоИФФмЩњаЇ:
$ rosservice call /clear
rosparam get:ВщПДВЮЪ§ЗўЮёЦїЩЯВЮЪ§ЕФжЕ
ВщПДВЮЪ§ЗўЮёЦїЩЯЦфЫћВЮЪ§ЕФжЕЁЃЛёШЁБГОАЕФТЬЩЋЭЈЕРЕФжЕ:
$ rosparam get /turtlesim/background_g
вВПЩвдгУrosparam get /РДЯдЪОВЮЪ§ЗўЮёЦїЩЯЕФЫљгаФкШн:
$ rosparam get /
jym@ubuntu:~$ rosparam get /
rosdistro: 'noetic
'
roslaunch:
uris:
host_ubuntu__36577: http://ubuntu:36577/
rosversion: '1.15.13
'
run_id: 7f07518e-3585-11ec-8099-99fb076f9407
turtlesim:
background_b: 255
background_g: 86
background_r: 150
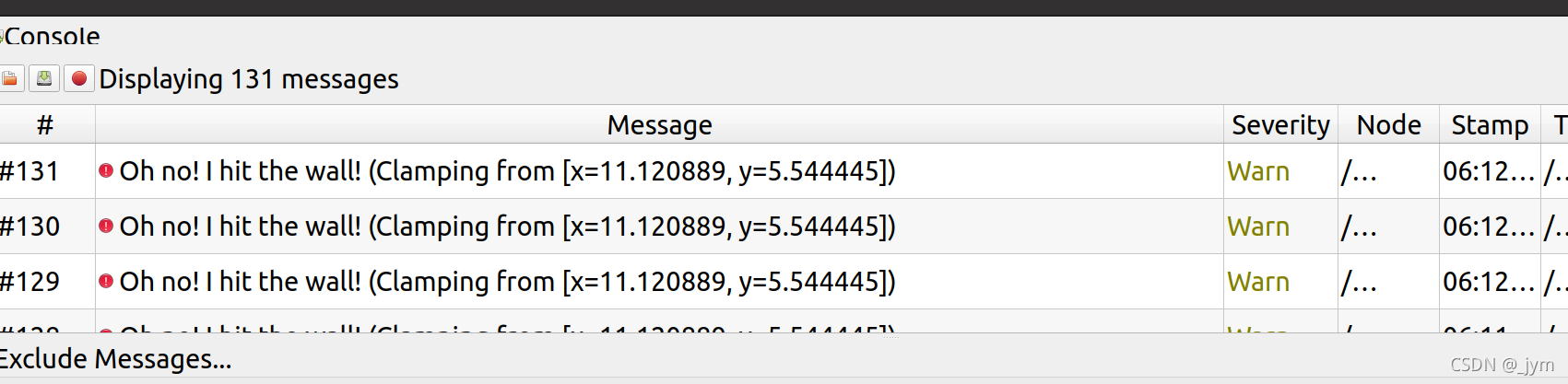
rqt_console:СЌНгROSЕФШежОПђМм,ЯдЪОНкЕуЕФЪфГіаХЯЂ
rqt_consoleСЌНгЕНСЫROSЕФШежОПђМм,вдЯдЪОНкЕуЕФЪфГіаХЯЂЁЃ
rqt_logger_level:дкНкЕудЫааЪБИФБфЪфГіаХЯЂЕФЯъЯИМЖБ№
rqt_logger_levelдЪаэЮвУЧдкНкЕудЫааЪБИФБфЪфГіаХЯЂЕФЯъЯИМЖБ№,АќРЈDebugЁЂInfoЁЂWarnКЭError`ЁЃ
НгЯТРД,ПДвЛЯТturtlesimдкrqt_consoleжаЪфГіЕФаХЯЂ,ЭЌЪБдкЪЙгУturtlesimЪБЧаЛЛrqt_logger_levelжаЕФШежОМЖБ№ЁЃ
дкЦєЖЏturtlesimжЎЧАЯШдкСНИіаТжеЖЫжадЫааrqt_consoleКЭrqt_logger_level:
$ rosrun rqt_console rqt_console
$ rosrun rqt_logger_level rqt_logger_level
дкСэвЛИіаТжеЖЫжаЦєЖЏturtlesim:
$ rosrun turtlesim turtlesim_node
вђЮЊФЌШЯЕФШежОМЖБ№ЪЧInfo,ЫљвдФуЛсПДЕНturtlesimЦєЖЏКѓЗЂВМЕФЫљгааХЯЂЁЃ
АбЮкЙъзВЕНЧНЩЯ,rqt_consoleЩЯЛсЯдЪО:
ШежОМЖБ№ЕФгХЯШМЖАДвдЯТЫГађХХСа:
Fatal (жТУќ)
Error (ДэЮѓ)
Warn (ОЏИц)
Info (аХЯЂ)
Debug (ЕїЪд)
FatalЪЧзюИпгХЯШМЖ,DebugЪЧзюЕЭгХЯШМЖЁЃЭЈЙ§ЩшжУШежОМЖБ№,ФуПЩвдЛёЕУЫљгагХЯШМЖМЖБ№,ЛђжЛЪЧИќИпМЖБ№ЕФЯћЯЂЁЃБШШч,НЋШежОМЖБ№ЩшЮЊWarnЪБ,ФуЛсЕУЕНWarnЁЂErrorКЭFatalетШ§ИіЕШМЖЕФШежОЯћЯЂЁЃ

roslaunch:ЦєЖЏЖЈвхдкlaunch(ЦєЖЏ)ЮФМўжаЕФНкЕу
roslaunchПЩвдгУРДЦєЖЏЖЈвхдкlaunch(ЦєЖЏ)ЮФМўжаЕФНкЕуЁЃ
ЪзЯШ,АДееДДНЈcatkinЙЄзїПеМфКѓУцЕФВНжшЪЙЛЗОГБфСПЩњаЇ
ШЛКѓ,ЧаЛЛЕНжЎЧАДДНЈКЭЙЙНЈЕФbeginner_tutorialsШэМўАќФПТМЯТ
ШЛКѓ,ДДНЈвЛИіlaunchФПТМ
jym@ubuntu:~$ cd ~/catkin_ws
jym@ubuntu:~/catkin_ws$ source devel/setup.bash
jym@ubuntu:~/catkin_ws$ roscd beginner_tutorials
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ mkdir launch
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ cd launch
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/launch$
ДДНЈвЛИіУћЮЊturtlemimic.launchЕФlaunchЮФМў
$ gedit turtlemimic.launch
ШЛКѓеГЬљНјШЅ
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
launch XMLЮФМўЕФФкШн
<launch>
ЪзЯШгУlaunchБъЧЉПЊЭЗ,вдБэУїетЪЧвЛИіlaunchЮФМўЁЃ
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
ДЫДІЮвУЧДДНЈСЫСНИіЗжзщ,ВЂвдУќУћПеМф(namespace)БъЧЉРДЧјЗж,ЦфжавЛИіУћЮЊturtulesim1,СэвЛИіУћЮЊturtlesim2,СНИіЗжзщжаЖМгаЯрЭЌЕФУћЮЊsimЕФturtlesimНкЕуЁЃетбљПЩвдШУЮвУЧЭЌЪБЦєЖЏСНИіturtlesimФЃФтЦї,ЖјВЛЛсВњЩњУќУћГхЭЛЁЃ
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
дкетРяЮвУЧЦєЖЏФЃЗТНкЕу,ЛАЬтЕФЪфШыКЭЪфГіЗжБ№жиУќУћЮЊturtlesim1КЭturtlesim2,етбљОЭПЩвдШУturtlesim2ФЃЗТturtlesim1СЫЁЃ
</launch>
етвЛааЪЙЕУlaunchЮФМўЕФXMLБъЧЉБеКЯЁЃ
ЪЙгУroslaunch:дЫааlaunchЮФМў
ЭЈЙ§roslaunchУќСюРДдЫааlaunchЮФМў:
$ roslaunch beginner_tutorials turtlemimic.launch
ЯждкНЋЛсгаСНИіturtlesimБЛЦєЖЏ,ШЛКѓЮвУЧдквЛИіаТжеЖЫжаЪЙгУrostopicУќСюЗЂЫЭ:
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
СНИіturtlesimsЭЌЪБПЊЪМвЦЖЏ,ЫфШЛЗЂВМУќСюжЛЗЂЫЭИјСЫturtlesim1ЁЃ

ЪЕЯжЙ§ГЬжа,гаШ§ИіжеЖЫ:
ЕквЛИі:ЪфШыroscore
jym@ubuntu:~$ roscore
... logging to /home/jym/.ros/log/bd42545e-3598-11ec-8099-99fb076f9407/roslaunch-ubuntu-10960.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:43275/
ros_comm version 1.15.13
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.13
NODES
auto-starting new master
process[master]: started with pid [10968]
ROS_MASTER_URI=http://ubuntu:11311/
ЕкЖўИі:дЫааlaunchЮФМў
jym@ubuntu:~$ cd ~/catkin_ws
jym@ubuntu:~/catkin_ws$ source devel/setup.bash
jym@ubuntu:~/catkin_ws$ roscd beginner_tutorials
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ roslaunch beginner_tutorials turtlemimic.launch
... logging to /home/jym/.ros/log/bd42545e-3598-11ec-8099-99fb076f9407/roslaunch-ubuntu-11191.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:36829/
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.13
NODES
/
mimic (turtlesim/mimic)
/turtlesim1/
sim (turtlesim/turtlesim_node)
/turtlesim2/
sim (turtlesim/turtlesim_node)
ROS_MASTER_URI=http://localhost:11311
process[turtlesim1/sim-1]: started with pid [11205]
process[turtlesim2/sim-2]: started with pid [11206]
process[mimic-3]: started with pid [11208]
ЕкШ§ИіжеЖЫ:ЪЙгУrostopicУќСюЗЂЫЭ
jym@ubuntu:~$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'