Abstract
етЦЊЮФеТжаЮвУЧНщЩмСЫBoundary Attack, a decision-based attack that starts from a large adversarial perturbation and then seeks to reduce the perturbation while staying adversarialЁЃетжжЙЅЛїдкИХФюЩЯЪЎЗжМђЕЅ,requires close to no hyperparameter tuning,ВЂВЛвРРЕгкЬцДњФЃаЭ and is competitive with the best gradient-based attacks in standard computer vision tasks like ImageNet. We apply the attack on two black-box algorithms from Clarifai.com. The Boundary Attack in particular and the class of decision-based attacks in general open new avenues to study the robustness of machine learning models and raise new questions regarding the safety of deployed machine learning systems. An implementation of the attack is available as part of Foolbox (https://github.com/bethgelab/foolbox)ЁЃ
1 Introduction
ЖдПЙШХЖЏДгСНЗНУцЮќв§СЫКмЖрЙизЂЁЃвЛЗНУц, they are worrisome for the integrity and security of deployed machine learning algorithms such as autonomous cars or face recognition systems. ЖдгкНжЕРБъжО(Р§ШчНЋвЛИіstop-signЪЖБ№ЮЊвЛИіЯоЫйСНАйЕФБъжОХЦ)ЕФЮЂаЁШХЖЏПЩФмЛсЕМжТКмбЯжиЕФКѓЙћЁЃСэвЛЗНУц, adversarial perturbations provide an exciting spotlight on the gap between the sensory information processing in humans and machines and thus provide guidance towards more robust, human-like architecturesЁЃ
БОЮФЙизЂгквЛИіФПЧАНіЪеЕНКмЩйЙизЂЕФКкКаЙЅЛїРрБ№:
- Decision-based attacks. Direct attacks that solely rely on the final decision of the model(such as the top-1 class label or the transcribed sentence).
The ТжРЊ of this category is justified for the following reasons: First, compared to score-based attacks decision-based attacks are much more relevant in real-world machine learning applications where confidence scores or logits are rarely accessible. At the same time decision-based attacks have the potential to be much more robust to standard defences like gradient masking, intrinsic stochasticity or robust training than attacks from the other categories. Finally, compared to transfer-based attacks they need much less information about the model (neither architecture nor training data) and are much simpler to apply.
There currently exists no effective decision-based attack that scales to natural datasets such as ImageNet and is applicable to deep neural networks (DNNs).
Throughout the paper we focus on the threat scenario in which the adversary aims to change the decision of a model (either targeted or untargeted) for a particular input sample by inducing a minimal
perturbation to the sample. The adversary can observe the final decision of the model for arbitrary
inputs and it knows at least one perturbation, however large, for which the perturbed sample is
adversarial.
БОЮФЙБЯзШчЯТ:
- ЮвУЧЧПЕїdecision-based attacksЪЧЖдПЙЙЅЛїЕФвЛИіживЊЕФРрБ№вђЮЊетжжЙЅЛї are highly relevant for real-world applications and important to gauge model robustness.
- ЮвУЧНщЩмСЫЕквЛИігааЇЕФdecision-based attackФмЙЛЭиеЙЕНИДдгЕФЛњЦїбЇЯАФЃаЭвдМАnatural datasets. The Boundary Attack is (1) ИХФюЩЯЪЎЗжМђЕЅ (2) ЗЧГЃСщЛю (3) ВЛашвЊЕїећЙ§ЖрЕФГЌВЮЪ§ (4) is competitive with the best gradient-based attacks in both targeted and untargeted computer vision scenarios.
- We show that the Boundary Attack is able to break previously suggested defence mechanisms like defensive distillation.
- We demonstrate the practical applicability of the Boundary Attack on two black-box machine learning models for brand and celebrity recognition available on Clarifai.com.
ТлЮФжавЊгУЕНЕФЪѕгя:
- o o oжИДњдЪМЪфШы(МДвЛеХЭМЦЌ)
- y = F ( o ) y=F(o) y=F(o)жИДњФЃаЭ F ( ? ) F(\cdot) F(?)ЕФШЋВПЪфГі(МДlogitsЛђprobabilities)
- y m a x y_{max} ymax?жИДњдЄВтЕФБъЧЉ(МДРрБ№БъЧЉ)
- o ~ \tilde{o} o~жИДњЖдПЙШХЖЏКѓЕФЭМЦЌ, o ~ k \tilde{o}^k o~kжИДњЙЅЛїЫуЗЈЕк k k kВНДІРэЙ§ЕФШХЖЏЭМЦЌ
ЯђСПгУКкЬхНјааСЫБъзЂЁЃ
2 Boundary Attack
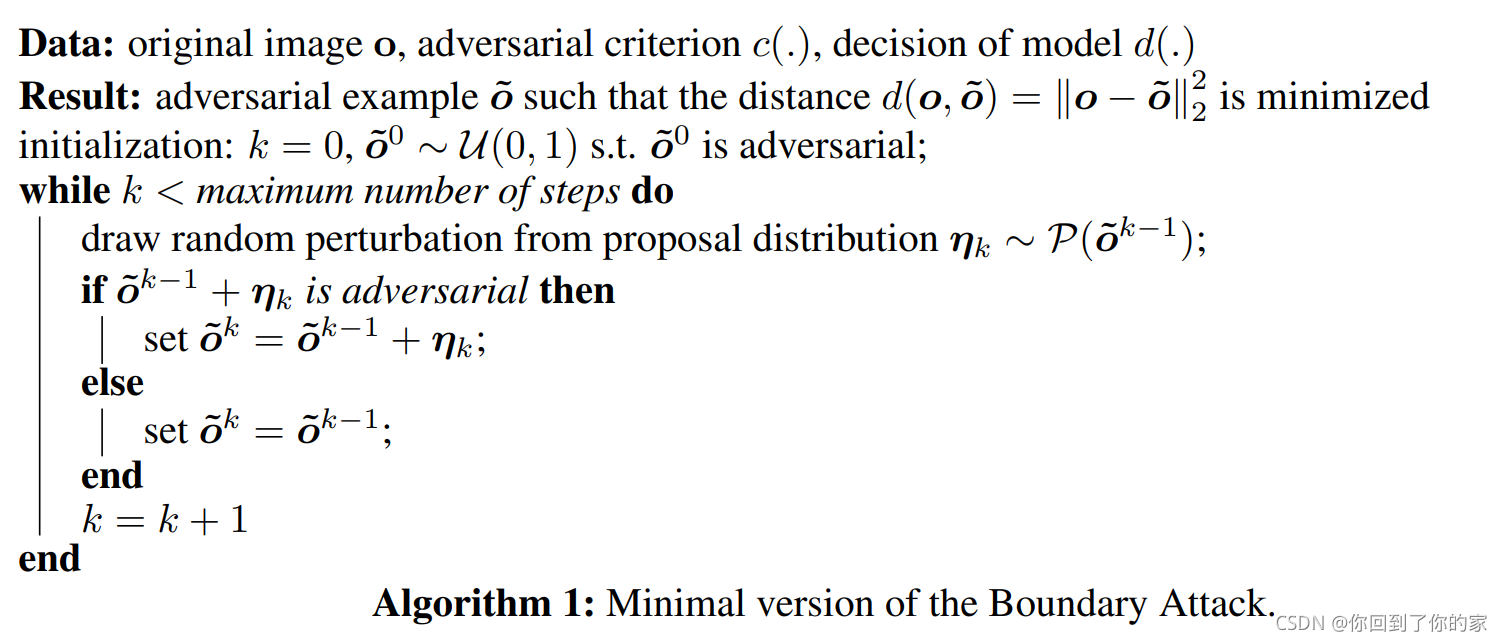
boundary attackЫуЗЈдкЭМ2жаНјааСЫУшЪі:

ЫуЗЈДгвЛИівбОЪЧЖдПЙЭМЦЌЕФЕуГіЗЂ,ШЛКѓбизХЖдПЙЭМЦЌКЭдЪМЭМЦЌжЎМфЕФБпНчНјааЫцЛњаазп,ЕЋетИіЙ§ГЬашвЊТњзу:(1)ЭЃСєдкЖдПЙЧјгђФк(2)ОрРыдЪМЭМЦЌЕФОрРыВЛЖЯМѕаЁЁЃ
ЛЛОфЛАЫЕ we perform rejection sampling with a suitable proposal distribution P \mathcal{P} P to find progressively smaller adversarial perturbations according to a given adversarial criterion c ( ? ) c(\cdot) c(?)ЁЃЫуЗЈЕФЛљБОТпМдкЫуЗЈ1жаНјааСЫУшЪі:
2.1 initialization
boundary attackашвЊДгвЛИівбОЪЧЖдПЙЭМЦЌЕФбљБОГіЗЂЁЃдквЛИіЗЧФПБъадЕФГЁОАЯТ,ЮвУЧsimply sample from a maximum entropy distribution given the valid domain of the input. In the computer vision applications below, where the input is constrained to a range of [ 0 , 255 ] [0,255] [0,255] per pixel, we sample each pixel in the initial image o ~ 0 \tilde{o}^0 o~0 from a uniform distribution U ( 0 , 255 ) \mathcal{U}(0,255) U(0,255)ЁЃWe reject samples that are not adversarial. In a targeted scenario we start from any sample that is classified by the model as being from the target class.
2.2 proposal distribution
ЫуЗЈЕФаЇТЪбЯжиШЁОігкproposal distribution P \mathcal{P} P,МДwhich random directions are explored in each step of the algorithm. The optimal proposal distribution will generally depend on the domain and / or model to be attacked, but for all vision-related problems tested here a very simple proposal distribution worked surprisingly well. The basic idea behind this proposal distribution is as follows: in the k-th step we want to draw perturbations ІЧ k \eta^k ІЧk from a maximum entropy distribution subject to the following constraints:
- ШХЖЏЕФбљБОЮЛгкЪфШыгђФк:
o ~ i k ? 1 + ІЧ i k ЁЪ [ 0 , 255 ] ( 1 ) \tilde{o}^{k-1}_i+\eta_i^k\in[0,255]\quad\quad\quad\quad(1) o~ik?1?+ІЧik?ЁЪ[0,255](1) - The perturbation has a relative size of
ІФ
\delta
ІФ:
ЁЮ ІЧ k ЁЮ 2 = ІФ ? d ( o , o ~ k ? 1 ) ( 2 ) \Vert \eta^k\Vert_2=\delta\cdot d(o,\tilde{o}^{k-1})\quad\quad\quad\quad(2) ЁЮІЧkЁЮ2?=ІФ?d(o,o~k?1)(2) - ШХЖЏЛсreduces the distance of the perturbed image towards the original input by a relative amount
?
\epsilon
?
d ( o , o ~ k ? 1 ) ? d ( o , o ~ k ? 1 + ІЧ k ) = ? ? ( o , o ~ k ? 1 ) ( 3 ) d(o,\tilde{o}^{k-1})-d(o,\tilde{o}^{k-1}+\eta^k)=\epsilon\cdot(o,\tilde{o}^{k-1})\quad\quad\quad(3) d(o,o~k?1)?d(o,o~k?1+ІЧk)=??(o,o~k?1)(3)
ЪЕМЪЩЯЯывЊДгетИіЗжВМжаШЁбљЪЧЪЎЗжРЇФбЕФ,вђДЫЮвУЧВЩШЁСЫвЛжжИќМђЕЅЕФЦєЗЂЪНЫуЗЈ:
- ЪзЯШ,ЮвУЧДгвЛИіЖРСЂЭЌЗжВМЕФИпЫЙЗжВМ ІЧ i k ЁЋ N ( 0 , 1 ) \eta_i^k\sim\mathcal{N}(0,1) ІЧik?ЁЋN(0,1)жаШЁбљ,and then rescale and clip the sample such that (1) and (2) holdЁЃ
- ЕкЖўВНЮвУЧ project ІЧ k \eta^k ІЧk onto a sphere around the original image o such that d ( o , o ~ k ? 1 + ІЧ k ) = d ( o , o ~ k ? 1 ) d(o,\tilde{o}^{k-1}+\eta^k)=d(o,\tilde{o}^{k-1}) d(o,o~k?1+ІЧk)=d(o,o~k?1) and (1) hold. We denote this as the orthogonal perturbation and use it later for hyperparameter tuning.
- In the last step we make a small movement towards the original image such that (1) and (3) hold. For high-dimensional inputs and small ІФ , ? \delta,\epsilon ІФ,? the constraint (2) will also hold approximately.
2.3 adversarial criterion
вЛИіОЕфЕФХаЖЈвЛИіЪфШыЪЧЖдПЙбљБОЕФcriterionЪЧЙлВьетИібљБОЪЧЗёБЛЮѓЗжРр,МДФЃаЭЪЧЗёНЋШХЖЏКѓЕФбљБОЪЖБ№ЮЊКЭШХЖЏЧАЕФЭМЦЌВЛЭЌЕФРрЁЃСэЭтвЛИіГЃгУЕФбЁдёЪЧtargeted misclassification for which the perturbed input has to be classified in a given target class. ЦфЫћЕФбЁдёАќРЈ top-k misclassification (the top-k classes predicted for the perturbed input do not contain the original class label) or thresholds on certain confidence scores. Outside of computer vision many other choices exist such as criteria on the worderror rates. In comparison to most other attacks, the Boundary Attack is extremely flexible with regards to the adversarial criterion. It basically allows any criterion (including non-differentiable ones) as long as for that criterion an initial adversarial can be found (which is trivial in most cases).
2.4 hyperparameter adjustment
boundary attackНігаСНИіЯрЙиЕФГЌВЮЪ§:the length of the total perturbation ІФ \delta ІФ and the length of the step ? \epsilon ? towards the original input (ВЮПМЭМЖў)ЁЃ We adjust both parameters dynamically according to the local geometry of the boundary. The adjustment is inspired by Trust Region methods. In essence, we first test whether the orthogonal perturbation is still adversarial. If this is true, then we make a small movement towards the target and test again. The orthogonal step tests whether the step-size is small enough so that we can treat the decision boundary between the adversarial and the non-adversarial region as being approximately linear. If this is the case, then we expect around 50% of the orthogonal perturbations to still be adversarial. If this ratio is much lower, we reduce the step-size ІФ, if it is close to 50% or higher we increase it. If the orthogonal perturbation is still adversarial we add a small step towards the original input. The maximum size of this step depends on the angle of the decision boundary in the local neighbourhood (see also Figure 2). If the success rate is too small we decrease , if it is too large we increase it. Typically, the closer we get to the original image, the flatter the decision boundary becomes and the smaller has to be to still make progress. The attack is converged whenever converges to zero.