一、Dlib库介绍与安装
1. Dlib库简介
?Dlib库是一个机器学习的开源库,包含了机器学习的很多算法,使用起来很方便,直接包含头文件即可,并且不依赖于其他库(自带图像编解码库源码)。Dlib可以帮助创建很多复杂的机器学习方面的软件来帮助解决实际问题。目前Dlib已经被广泛的用在行业和学术领域,包括机器人,嵌入式设备,移动电话和大型高性能计算环境。
?
2. 安装Dlib库
pip install dlib
二、OpenCV介绍即安装
1. OpenCV简介
OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上。它轻量级而且高效――由一系列 C 函数和少量 C++ 类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
?
2. OpenCV安装
pip3 install opencv_python
三、提取人脸特征点
此处使用视频测试
# -*- coding: utf-8 -*-
"""
Created on Wed Oct 27 03:15:10 2021
@author: GT72VR
"""
import numpy as np
import cv2
import dlib
import os
import sys
import random
# 存储位置
output_dir = 'C:/Users/王青松/'
size = 64
if not os.path.exists(output_dir):
os.makedirs(output_dir)
# 改变图片的亮度与对比度
def relight(img, light=1, bias=0):
w = img.shape[1]
h = img.shape[0]
#image = []
for i in range(0,w):
for j in range(0,h):
for c in range(3):
tmp = int(img[j,i,c]*light + bias)
if tmp > 255:
tmp = 255
elif tmp < 0:
tmp = 0
img[j,i,c] = tmp
return img
#使用dlib自带的frontal_face_detector作为我们的特征提取器
detector = dlib.get_frontal_face_detector()
# 打开摄像头 参数为输入流,可以为摄像头或视频文件
camera = cv2.VideoCapture('D:/wudipuls.mp4')
#camera = cv2.VideoCapture(?0)
ok = True
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
while ok:
# 读取摄像头中的图像,ok为是否读取成功的判断参数
ok, img = camera.read()
# 转换成灰度图像
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
rects = detector(img_gray, 0)
for i in range(len(rects)):
landmarks = np.matrix([[p.x, p.y] for p in predictor(img,rects[i]).parts()])
for idx, point in enumerate(landmarks):
# 68点的坐标
pos = (point[0, 0], point[0, 1])
print(idx,pos)
# 利用cv2.circle给每个特征点画一个圈,共68个
cv2.circle(img, pos, 2, color=(0, 255, 0))
# 利用cv2.putText输出1-68
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img, str(idx+1), pos, font, 0.2, (0, 0, 255), 1,cv2.LINE_AA)
cv2.imshow('video', img)
k = cv2.waitKey(1)
if k == 27: # press 'ESC' to quit
break
camera.release()
cv2.destroyAllWindows()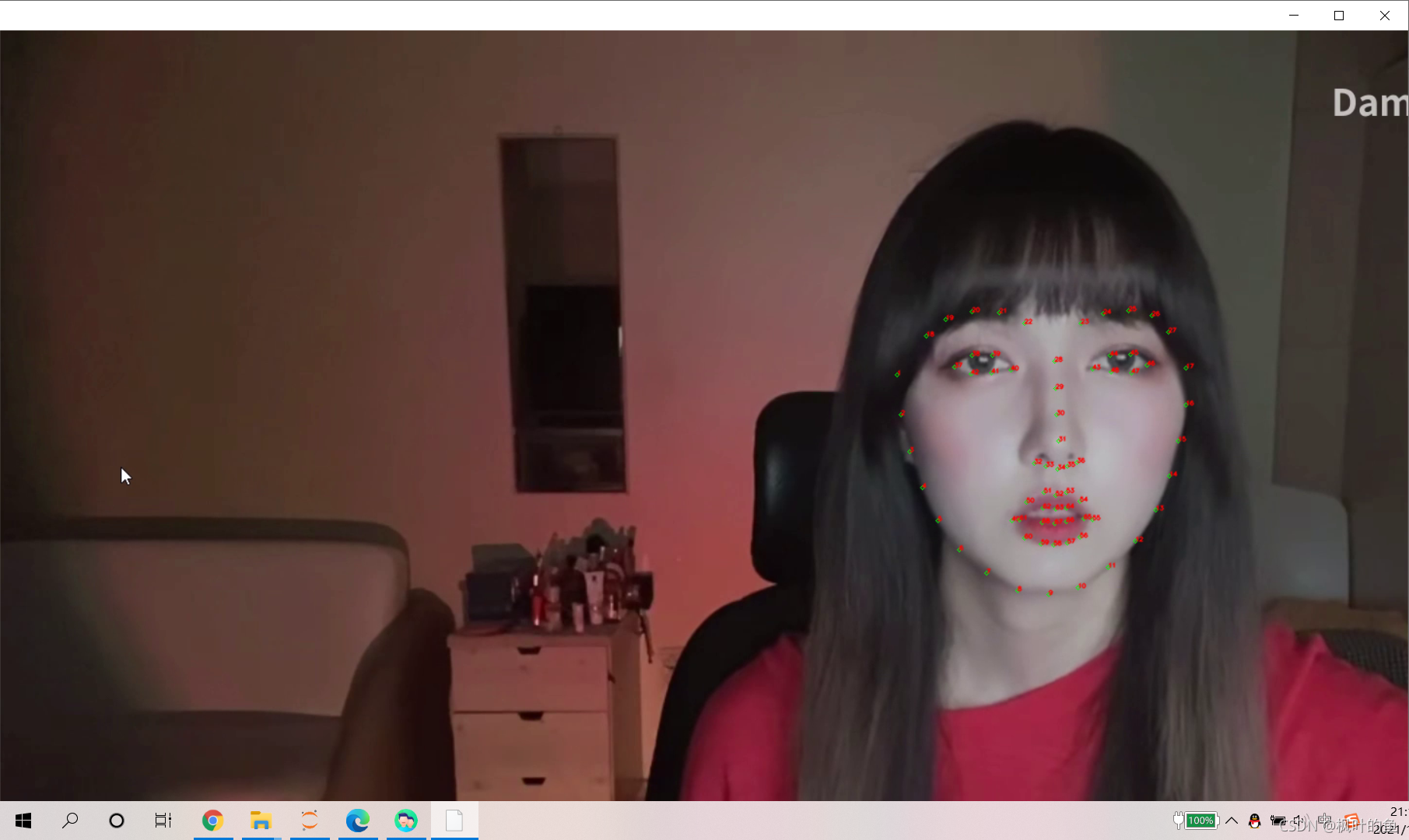
?
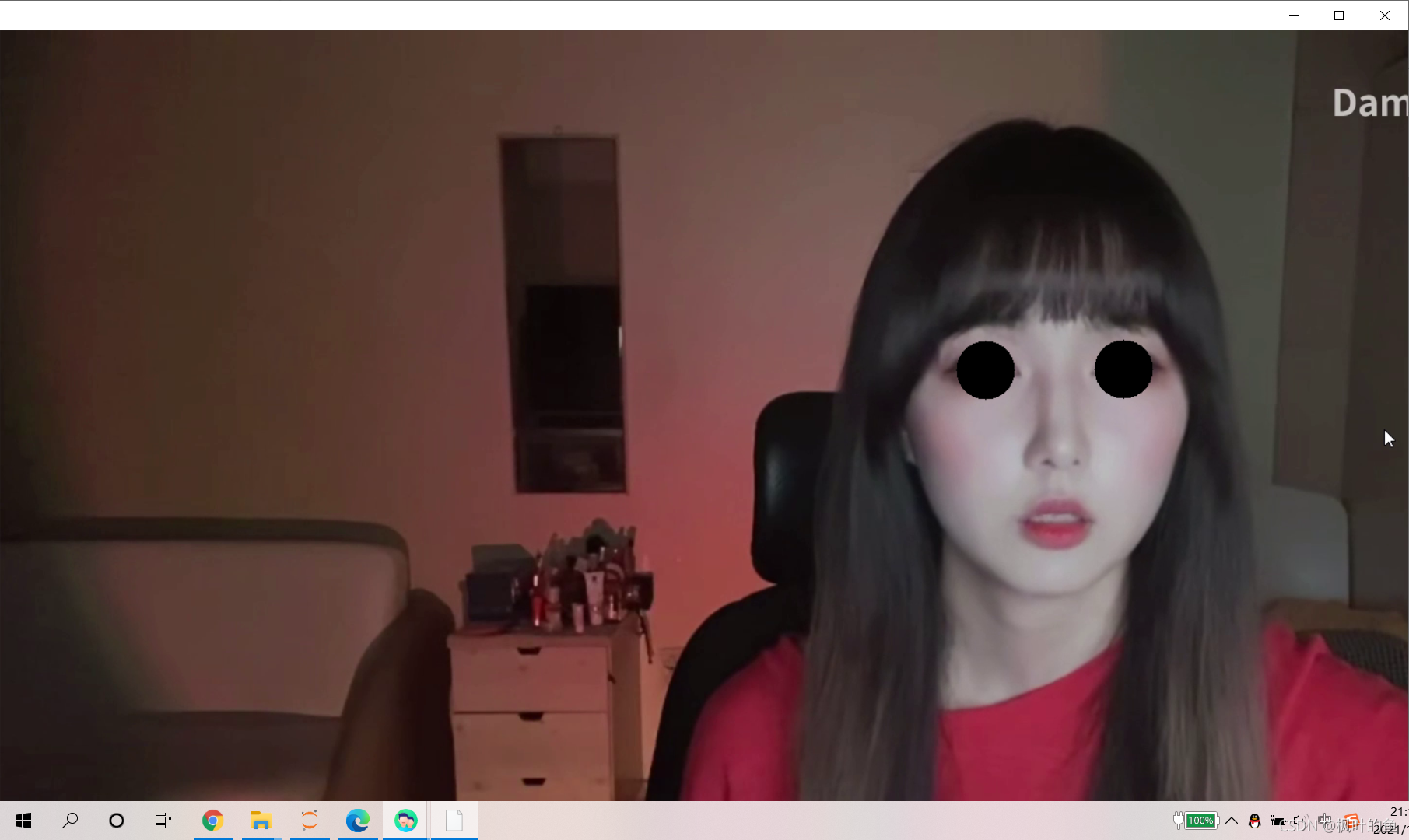
四、在眼睛处绘制黑色的实心圆
def painting_sunglasses(img,detector,predictor):
#给人脸带上墨镜
rects = detector(img_gray, 0)
for i in range(len(rects)):
landmarks = np.matrix([[p.x, p.y] for p in predictor(img,rects[i]).parts()])
right_eye_x=0
right_eye_y=0
left_eye_x=0
left_eye_y=0
for i in range(36,42):#右眼范围
#将坐标相加
right_eye_x+=landmarks[i][0,0]
right_eye_y+=landmarks[i][0,1]
#取眼睛的中点坐标
pos_right=(int(right_eye_x/6),int(right_eye_y/6))
cv2.circle(img=img, center=pos_right, radius=30, color=(0,0,0),thickness=-1)
for i in range(42,48):#左眼范围
#将坐标相加
left_eye_x+=landmarks[i][0,0]
left_eye_y+=landmarks[i][0,1]
#取眼睛的中点坐标
pos_left=(int(left_eye_x/6),int(left_eye_y/6))
cv2.circle(img=img, center=pos_left, radius=30, color=(0,0,0),thickness=-1)
#camera = cv2.VideoCapture(0)#打开摄像头
camera = cv2.VideoCapture('D:/wudipuls.mp4')
ok=True
# 打开摄像头 参数为输入流,可以为摄像头或视频文件
while ok:
ok,img = camera.read()
# 转换成灰度图像
img_gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#display_feature_point(img,detector,predictor)
painting_sunglasses(img,detector,predictor)#调用画墨镜函数
cv2.imshow('video', img)
k = cv2.waitKey(1)
if k == 27: # press 'ESC' to quit
break
camera.release()
cv2.destroyAllWindows()
五、总结?
本文简略地介绍了dlib库与OpenCV,并初步尝试使用dlib库对人脸的特征值进行提取。