����,����һ���������Ƶ�:ROSѧϰ-����ROS�ڵ� ʹ��roscore����ROS
$ roscore
ע��,��ǰֻ������һ��roscore,�����һ��������û�йر�roscore,��ô����ʾ����������������Ϣ��
roscore cannot run as another roscore/master is already running.
Please kill other roscore/master processes before relaunching
�ƶ�turtle
��������һ�����������ܵ�,����turtlesim���е�turtlesim_node�ڵ㡣
$ rosrun turtlesim turtlesim_node
����,��һ���µ�Terminal����,ʹ����������:
rosrun turtlesim turtle_teleop_key
��������ʾ:
Reading from keyboard
---------------------------
Use arrow keys to move the turtle. 'q' to quit.
�ܹ�ʹ�ü����еķ������ͷ,������С�ڹ���ƶ���

ע��:�������һ��Terminal������ǰ,���ܹ���¼����ļ���ֵ��
ROS Topics
ʹ��rqt_graph
����������ʹ��turtlesim_node �� turtle_teleop_key�����ڵ�������С�ڹ��ƶ�������,�����ڵ�֮��ͨ��Topic������ͨ�š�
turtle_teleop_key�ڵ�ͨ��һ�����ⷢ������ֵ,turtlesim_node�ڵ������ͬ�Ļ���,��ȡ���еļ���ֵ��
����������ʹ��rqt_graph��չʾ�������нڵ�֮��Ĺ�ϵ��
(ע��,���ROS�汾��electric���߸���,����ʹ��rqt,����ʹ��rxgraph����)
rqt_graph�� rqt_package��һ����,����,ʹ��apt-get����װrqt package��
$ sudo apt-get install ros-<distro>-rqt
$ sudo apt-get install ros-<distro>-rqt-common-plugins
(��֮ǰ�����еĽ̳����Ƶ�, ʹ�ö�Ӧ��ros�汾�滻,����kinetic��melodic֮���)
����,ʹ����������鿴�ڵ�֮��Ĺ�ϵ:
$ rosrun rqt_graph rqt_graph
����,����������ʹ�ù�������ʾ����û�а�װ��rospkg���Ĵ���
Traceback (most recent call last):
File "/opt/ros/melodic/lib/rqt_graph/rqt_graph", line 5, in <module>
from rqt_gui.main import Main
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/main.py", line 40, in <module>
from rospkg.rospack import RosPack
ModuleNotFoundError: No module named 'rospkg'
�������:
�ڵ�ǰbase������,ʹ��pip���а�װ��rospkg��:
pip install rospkg
��װ֮���ٴ�ʹ��rosrun rqt_graph rqt_graph�鿴�ڵ�֮��Ĺ�ϵ,���ǻ��dz��ִ���,��ʾ����,û�����ģ�顯pydot��,��Ҫ��װ:
Could not import "pyqt" bindings of qt_gui_cpp library - so C++ plugins will not be available:
Traceback (most recent call last):
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui_cpp/cpp_binding_helper.py", line 43, in <module>
from . import libqt_gui_cpp_sip
ImportError: dynamic module does not define module export function (PyInit_libqt_gui_cpp_sip)
RosPluginProvider.load(rqt_graph/RosGraph) exception raised in __builtin__.__import__(rqt_graph.ros_graph, [RosGraph]):
Traceback (most recent call last):
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/ros_plugin_provider.py", line 79, in load
module = __builtin__.__import__(
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_graph/ros_graph.py", line 45, in <module>
from qt_dotgraph.dot_to_qt import DotToQtGenerator
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_dotgraph/dot_to_qt.py", line 35, in <module>
import pydot
ModuleNotFoundError: No module named 'pydot'
PluginManager._load_plugin() could not load plugin "rqt_graph/RosGraph":
Traceback (most recent call last):
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/plugin_handler.py", line 102, in load
self._load()
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/plugin_handler_direct.py", line 55, in _load
self._plugin = self._plugin_provider.load(self._instance_id.plugin_id, self._context)
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 72, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 72, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui_py/ros_py_plugin_provider.py", line 61, in load
return super(RosPyPluginProvider, self).load(plugin_id, plugin_context)
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 72, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/ros_plugin_provider.py", line 90, in load
raise e
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/ros_plugin_provider.py", line 79, in load
module = __builtin__.__import__(
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_graph/ros_graph.py", line 45, in <module>
from qt_dotgraph.dot_to_qt import DotToQtGenerator
File "/opt/ros/melodic/lib/python2.7/dist-packages/qt_dotgraph/dot_to_qt.py", line 35, in <module>
import pydot
ModuleNotFoundError: No module named 'pydot'
����ʹ��pip���а�װ��pydot��:
pip install pydot
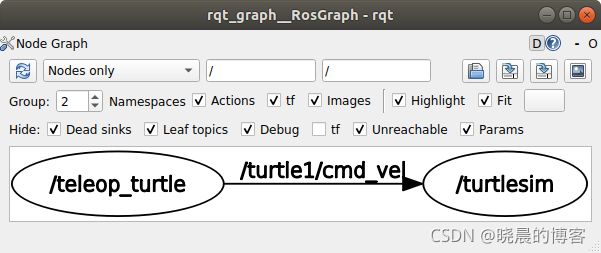
Ȼ��ʹ�����������ܹ�������ʾturtlesim_node �� turtle_teleop_key�����ڵ�֮�����ϵ��
$ rosrun rqt_graph rqt_graph
ע:������������ο�:
https://blog.csdn.net/Lynn_mg/article/details/91352139
https://blog.csdn.net/GungnirsPledge/article/details/107072380
https://blog.csdn.net/Cyril__Li/article/details/74017438
������ǰ���������ͼ�Ͻ���Խڵ�ͻ������һ��������ʾ,������ͼ�������ڵ�Ϊ��ɫ����ɫ,Ȼ���м�Ļ���Ϊ��ɫ����/teleop_turtle��turtlesim�ڵ�֮��ͨ��һ��/turtle1/cmd_vel�Ļ��������ϵ��

����rostopic����
���ǿ���ͨ��rostopic���߿����˽�ROS��topic�������Ϣ��
����ʹ������������ð���,�˽�rostopic��������
$ rostopic -h
������Ӧ��������,�Լ���˵�����á�
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
��������rostopic֮��ʹ��tap���鿴���ܵĶ��������
$ rostopic
bw echo find hz info list pub type
���Ŷ������е����������һЩ��Ҫ�Ľ��ܡ�
rostopic echo ���÷�
rostopic echo��չ��һ��topic���������ݡ��÷�������ʾ:
rostopic echo [topic]
�������������˵/teleop_turtle�ڵ��turtlesim�ڵ�֮��ͨ��һ��/turtle1/cmd_vel�Ļ��������ϵ������ʹ��rostopic echo������в鿴:
# Hydro��֮��İ汾ʹ����������,������melodic�汾,�������������
$ rostopic echo /turtle1/cmd_vel
# �����Groovy����֮ǰ����İ汾,��ͨ����������鿴
$ rostopic echo /turtle1/command_velocity
������ִ��֮��,�����ڽ����п������κ����,������Ϊ/teleop_turtle�ڵ㻹û��ͨ��������ⷢ�����ݡ����ǰ�֮ǰ��ros run turtlesim turtle_teleop_key���汣������ǰ��,��ʹ�ü����ϵķ��������С�ڹ���ƶ�,�����ڽ����п���������������Ϣ��
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: -2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
����,ʹ��ǰ����rosrun rqt_graph rqt_graph����鿴��ǰ�Ľڵ�������ʾ:
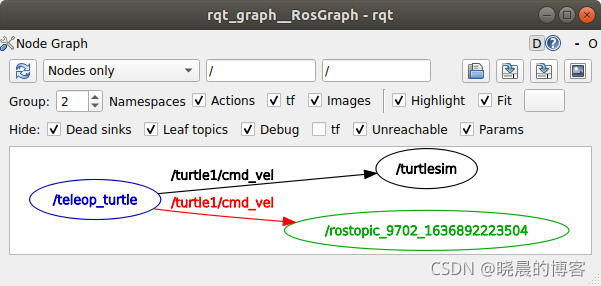
���Կ�������turtlesim�ڵ���յ�����/turtle1/cmd_vel֮��,����һ��rostopic echo(��ɫ����)Ҳ���յ��������Ϣ��
rostopic list ���÷�
rostopic list���Է��ص�ǰ���պͷ����ĵ�topic�б������ǿ���ͨ�� ��-h�� ����鿴rostopic list ���÷�:
Usage: rostopic list [/namespace]
Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
--host group by host name
���Կ���,ʹ��:
- ��-v�����Բ鿴���е�topic
- ��-p�����鿴������topic
- ��-s�����鿴���յ�topic
����ʹ��"-v"���в鿴:
$ rostopic list -v
���Կ���������������ʽ����Ϣ:
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1 publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher
* /rosout [rosgraph_msgs/Log] 3 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 subscriber
* /rosout [rosgraph_msgs/Log] 1 subscriber
* /statistics [rosgraph_msgs/TopicStatistics] 1 subscriber
ROS Messages
ǰ����ܹ�����,�����Ѿ��˽/teleop_turtle�ڵ��turtlesim�ڵ�֮��ͨ��һ��/turtle1/cmd_vel�Ļ��������ϵ,��ô�����������ô�������ڵ�֮����н�������?����ͨ������topics������ROS�е���Ϣmessages�������ڵ㷢���ͽ��յ���Ϣ���ͱ�����ͬ������ζ��ROS�����������䷢������Ϣ���Ͷ��塣Ҳ����ROS�������� ȷ������Ҫ���͵���Ϣ�����͡�
ʹ��rostopic type����
rostopic type������Է������⻰������������Ϣmessage���͡��÷�Ϊ:
rostopic type [topic]
�����������/turtle1/cmd_vel���⡣
$ rostopic type /turtle1/cmd_vel
���ص�ֵΪ:
geometry_msgs/Twist
����ʹ��rosmsg show ����鿴geometry_msgs/Twist��Ϣ��ϸ�ڡ�
$ rosmsg show geometry_msgs/Twist
���ص���Ϣϸ��Ϊ:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
��������֪����turtlesim����������Ϣ����,���ǾͿ�����turtlesim���������ˡ�
rostopic �ĸ��÷�
����������ѧϰ��ROS message,��������������ѧϰrostopic����message�����֪ʶ��
ʹ��rostopic pub
rostopic pub�����ݷ�������ǰ����Ļ����С��÷�����:
rostopic pub [topic] [msg_type] [args]
����ROS Hydro���Ժ�İ汾,ʹ������������������:
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
����ROS Groovy֮ǰ�İ汾,��ʹ�����������������
$ rostopic pub -1 /turtle1/command_velocity turtlesim/Velocity -- 2.0 1.8
ִ�н������:
������ͨ���������������С�ڹ�ͨ�����ٶ�2.0,���ٶ�1.8�ķ�ʽ�����ƶ���
����������Щ����,���Ƕ����������:
������ʹ����������rostopic pub,������Ϣ��ָ����topic��
rostopic pub
������һ��ѡ��"-1",ע�������� 1 ��������ĸ l������Ϊ"-1"����������һ��message��Ϣ���˳���
-1
������Ҫ������topic�����ơ�
/turtle1/cmd_vel
������topic����Ϣ������:
geometry_msgs/Twist
������ѡ������-,���C��,���߽����������IJ����ǿ�ѡ�ġ����ֻ��һ�� ��-�� ������DZ���ġ�
--
�������������ܹ������ᵽ��,һ��geometry_msgs/Twist��Ϣ����������,������������ʽ:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
������ͨ��YAML���ʽ����linear��angular���и�ֵ��
'[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
��linear��ֵΪ:x=2.0, y=0.0, z=0.0��
angular��ֵΪ: x=0.0, y=0.0, z=1.8��
�����ܹ�ע�,����ִ��������֮��С�ڹ��ƶ�һ�ξ�ֹͣ��,������Ϊ����ֻ�������ƶ�һ�Ρ����������Ҫ��С�ڹ�����ƶ�,����ͨ�� ��-r 1�� ������ 1Hz��Ƶ�ʳ����ȶ��ķ�����Ϣ���ݵ�����topic�С�
��������:
rostopic pub -r 1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]
��С�ڹ��˶�״̬������ʾ:
ע��:С�ڹ��ڳ�����Բ��Բ���˶���