图像处理、立体视觉 里面 常说四个坐标系:
世界坐标系、相机坐标系、图像坐标系、像素坐标系
咱们倒着说:
像素坐标系
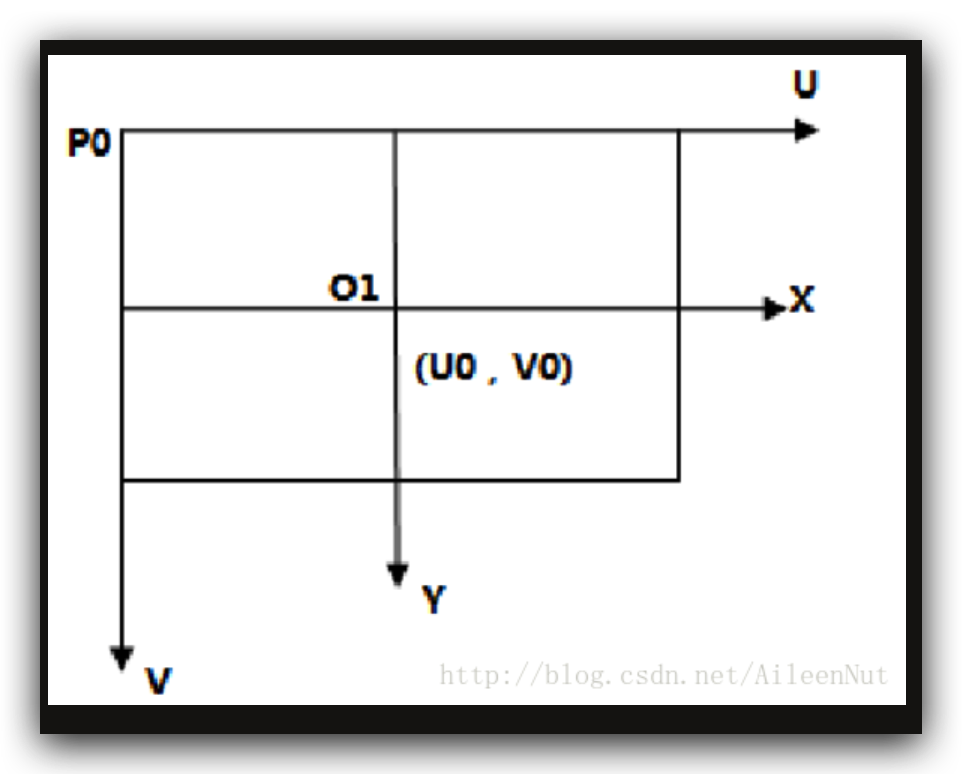
P0 作为原点, UV 所形成的,就是 像素坐标系
图像坐标系
还是用上图,里面 x y 的就是 图像坐标系,其原心就是 里面 的O1, 就是 (U0, V0)所指的那一点。
图像坐标系,是人为规定的,用于测距时候,就会每个 像素有 长度单位,比如几米。
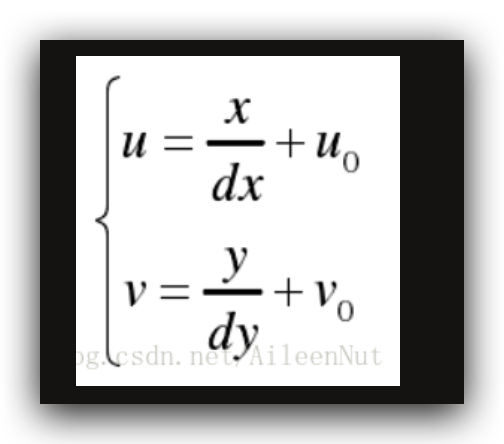
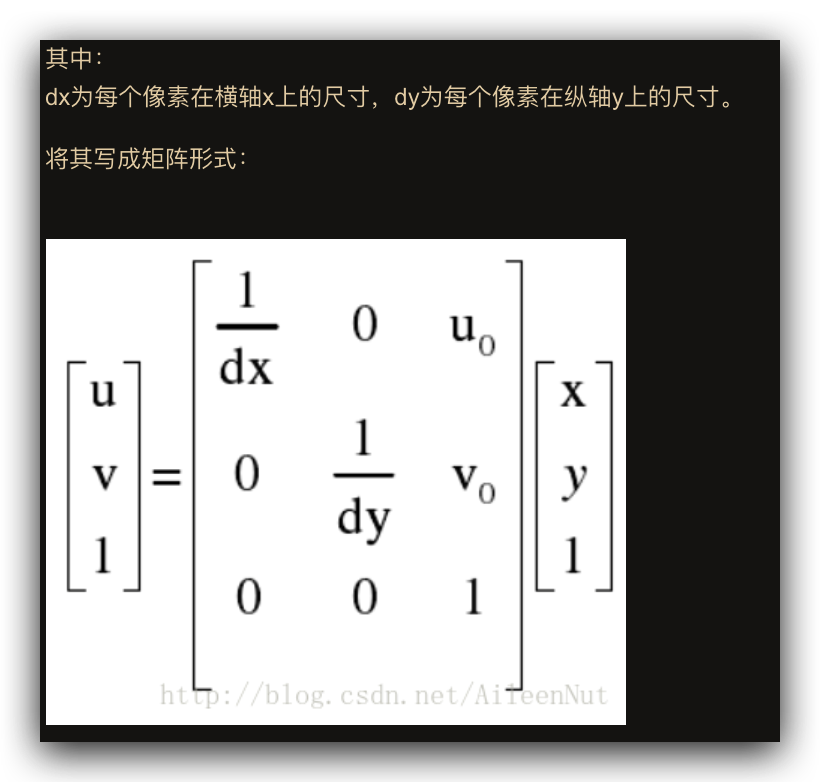
像素坐标系与图像坐标系的转换关系
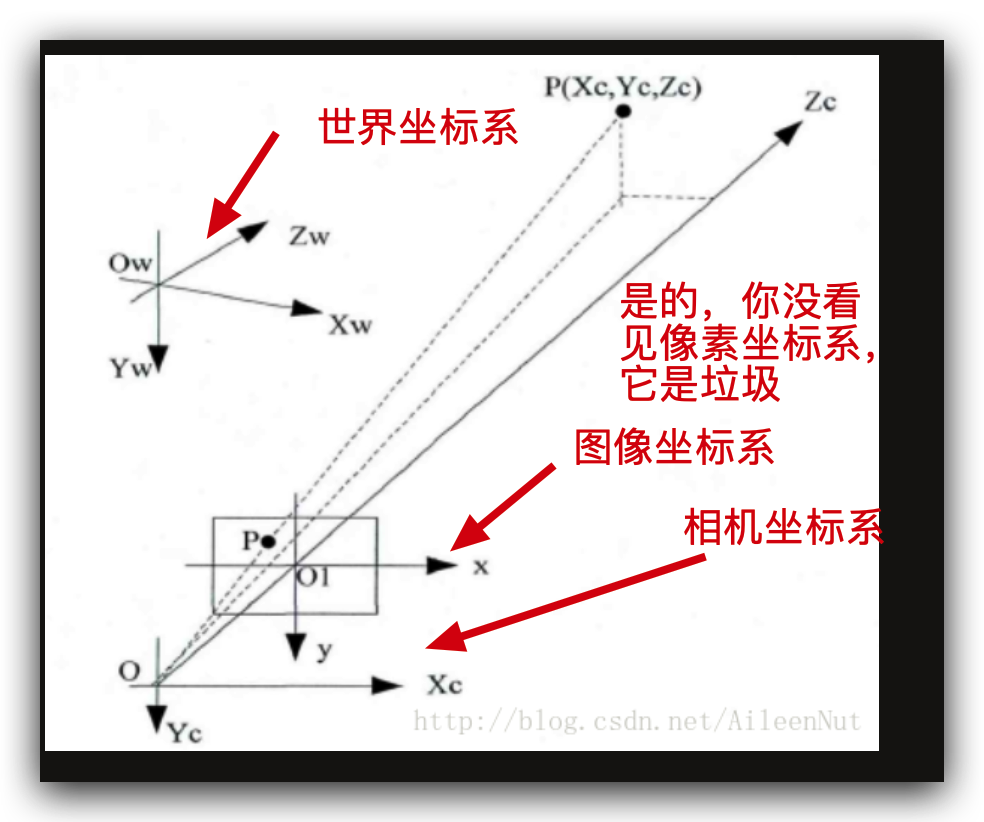
相机坐标系
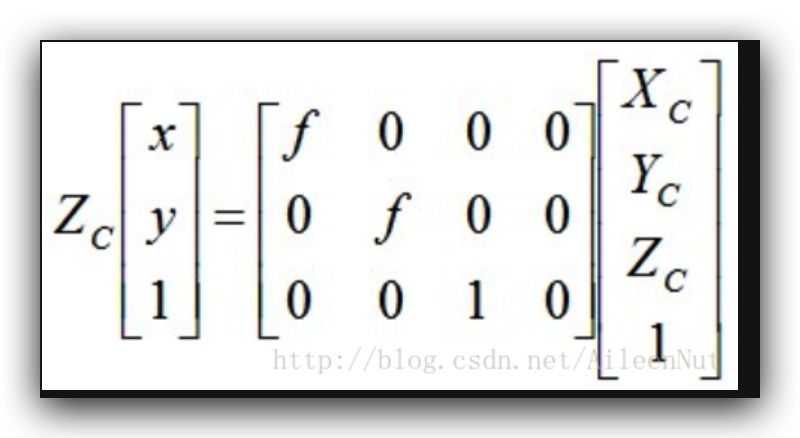
图像(物理)坐标系和相机坐标系的转换关系:
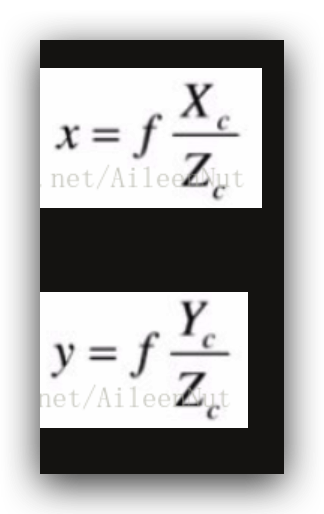
矩阵形式如下:
世界坐标系
我已经 在 相机坐标系 的图里面标注了
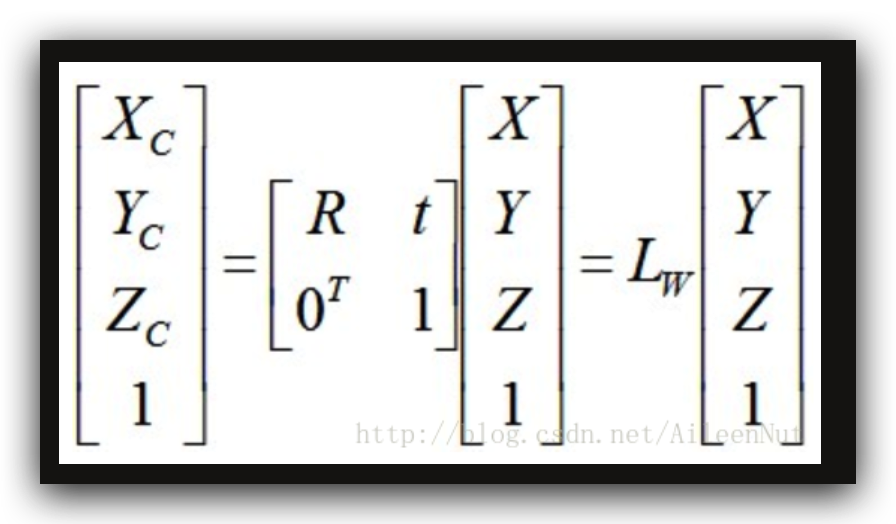
值得考虑的是 相机坐标系与世界坐标系的转换关系:
以上都是参考:
https://blog.csdn.net/AileenNut/article/details/76922534
不懂如何几个坐标系之间 发生 坐标转换的,有空可以继续看:
https://blog.csdn.net/chentravelling/article/details/53558096
参考了:
https://blog.csdn.net/AileenNut/article/details/76922534
https://blog.csdn.net/chentravelling/article/details/53558096