����Ŀ¼
ǰ��
һ��FOCʸ������ԭ��
1. FOCʸ�����Ƹ���
���ݰٶȰٿ�,ʸ������(vector control)Ҳ��Ϊ�ų��������(field-oriented control,���FOC),��һ�����ñ�Ƶ��(VFD)�������ཻ������ļ���,���õ�����Ƶ�������Ƶ�ʡ������ѹ�Ĵ�С���Ƕ�,�����Ƶ����������������ǿ��Էֱ���Ƶ���Ĵų���ת��,��������ʽֱ����������ԡ����ڴ���ʱ�Ὣ���������������ѹ��ʸ������ʾ,��˳�Ϊʸ�����ơ�
ͨ������,FOC��һ��������Խ�ĵ�����Ʒ���,���dz��õ�ֱ����ˢ���(BLCD)������ͬ�����(PMSM)�����õ���ʸ�����ơ�FOCͨ����ȷ�Ŀ��ƴų��Ĵ�С�Լ�����,ʹ�õ����תƽ�ȡ������͡�ת�غ㶨����Ӧ�ٶȿ顢��������,����ʵ�ֶԵ���ľ�ȷ���ơ�
2.������֪ʶ���
2.1.����
�ڸ��е�ʱ��,����ѧ���������ֶ����жϵ����ڴų������и�Ÿ����˶������ĵ�������;�����ֶ����ж�ͨ�絼���ڴų��е���������;����������(������������)���ж�ͨ�������ܵĴż���
 ����ͼ,����ͬ����⡢�켫����ͨ�������ܲ����Ĵż����м��������������������ų⡱����,ʹ�������������˳ʱ���ת��,ֱ���綯����ԭ�����ǻ��ڴ˵ġ������ֱ����ˢ���Ϊ�����н�һ�����⡣ֱ����ˢ�����ֱ����ˢ���Ľ����õ��ӻ����������̼ˢ������,��ʹ�õ���������������,ͬʱ�����˵綯���ķ�����,������Ч�ʡ�
����ͼ,����ͬ����⡢�켫����ͨ�������ܲ����Ĵż����м��������������������ų⡱����,ʹ�������������˳ʱ���ת��,ֱ���綯����ԭ�����ǻ��ڴ˵ġ������ֱ����ˢ���Ϊ�����н�һ�����⡣ֱ����ˢ�����ֱ����ˢ���Ľ����õ��ӻ����������̼ˢ������,��ʹ�õ���������������,ͬʱ�����˵綯���ķ�����,������Ч�ʡ�
 ��ͼΪֱ����ˢ�����ģ��ͼ,������������Ȧ���,ת��Ϊһ��������,ͨ���ı�ABC����֮��ĵ������������ƶ��Ӳ����Ĵų�����,�Ӷ�ʹ��������ת����
��ͼΪֱ����ˢ�����ģ��ͼ,������������Ȧ���,ת��Ϊһ��������,ͨ���ı�ABC����֮��ĵ������������ƶ��Ӳ����Ĵų�����,�Ӷ�ʹ��������ת����
2.2.ֱ����ˢ�������
 �����������ͨ,ÿ����Ȧ�������ԵĴų�,���м�������������������������,�����������ĺ��������������������ȶ������ķ���,Ҳ���Ƕ��������������Ϊ���λ�á�������ͼ��ʾ��ͨ��˳��,���Կ���ֱ����ˢ�����ת,���ͨ���˳�����ɵ��ӻ�������ʵ�ֵġ�
�����������ͨ,ÿ����Ȧ�������ԵĴų�,���м�������������������������,�����������ĺ��������������������ȶ������ķ���,Ҳ���Ƕ��������������Ϊ���λ�á�������ͼ��ʾ��ͨ��˳��,���Կ���ֱ����ˢ�����ת,���ͨ���˳�����ɵ��ӻ�������ʵ�ֵġ�
2.2.BLCD��PMSM����
��ˢ������Է�Ϊ��ˢֱ�����(BLCD)������ͬ�����(PMSM),�ṹ����,�������߷�ʽ��ԭ��,��ʹ�����ֵ��ijЩ������������CBLCD����ķ��綯�ƽӽ����β�,PMSM�ķ��綯�ƽӽ����Ҳ�,����������ֵ���IJ���Ҳ���������졣
����ͼ������֪,ת���ڴų�����6���ȶ���״̬,�������ת�����л��п����С���˳��������BLCD������÷�������,Ϊ���ٿ�����ֻ��ͨ�����Ӽ����������������,����һֱ������ȥ����PMSM���ͨ��ƽ�������Ҳ�������,���ܹ��ڲ��ı����������������,ͨ��������������Ҳ���ʹ�ĵ���ܹ�ƽ��ת��,�����������,�����FOCʵ�ֵ�ԭ����
2.3.��ˢ�����������·
 ��ˢ�����������·Ϊ�����ѹԴ����·,��ԭ��ͼ������ʾ�����������ܵ���ˢ�������ģ����,ͨ������ABC���������������ͨ,�Ϳ��Բ���ijһ����Ĵų�,ʹ���������ܵ����ء�����·����Ϊ��ʵ����һ����,��������Ľ�ͨ,ʹ��ֱ������Ϊ����������
��ˢ�����������·Ϊ�����ѹԴ����·,��ԭ��ͼ������ʾ�����������ܵ���ˢ�������ģ����,ͨ������ABC���������������ͨ,�Ϳ��Բ���ijһ����Ĵų�,ʹ���������ܵ����ء�����·����Ϊ��ʵ����һ����,��������Ľ�ͨ,ʹ��ֱ������Ϊ����������
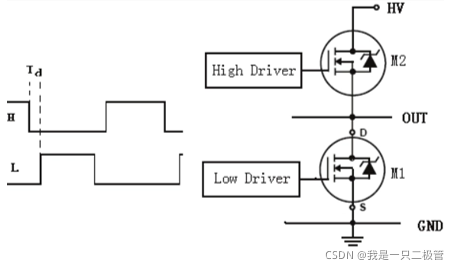
����·������MOS�������,ÿ��MOS������һ�����űۺ�һ�����ű����,ÿ���ű۶�Ϊͬ���͵�MOS����MOS����һ�������Եĵ�ѹ����Ԫ��,ͨ������դ����λ�ĸߵ�,ʵ��MOS��Դ����©���ĵ�ͨ���ر�,��һ�����������ĸ��ٵ��ӿ��ء�
���忪����
s
a
s_a
sa?��
s
b
s_b
sb?��
s
c
s_c
sc?��
s
a
��
s_{a^{'}}
sa��?��
s
b
��
s_{b^{'}}
sb��?��
s
c
��
s_{c^{'}}
sc��?��ʾ�������ʿ��������Ŀ���״̬����
s
a
s_a
sa?��
s
b
s_b
sb?��
s
c
s_c
sc?Ϊ1ʱ,�������·���ű�������ͨ,�����űۿ��������رռ�
s
a
��
s_{a^{'}}
sa��?��
s
b
��
s_{b^{'}}
sb��?��
s
c
��
s_{c^{'}}
sc��?Ϊ�㡣����ͬһ�����ű���,���ű۸����ű۵Ŀ����������ܹ�ͬʱ��ͨ,�������ֱ�Ӵ����ű��������ű��ٵ���Դ,��ɶ�·������������������·��·����ŵĿ���̬����8��,���ڲ�ͬ����״̬���
s
a
b
c
s_{abc}
sabc?�Ϳ��Եõ�8��������ѹ�ռ�ʸ��,�����������8�ֿ���ģʽ�Ͷ�Ӧ8����ѹ�ռ�ʸ��,���±���ʾ:
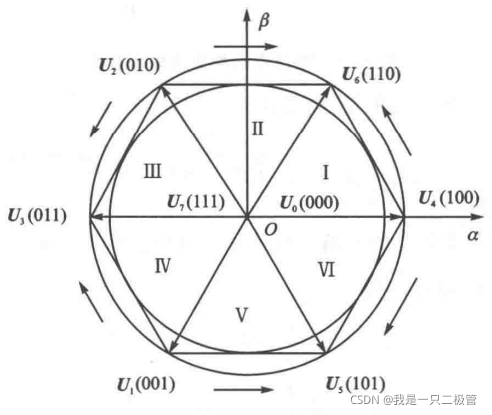
| ʸ�� | a���ű�״̬ | b���ű�״̬ | c���ű�״̬ |
|---|---|---|---|
| U 0 U_0 U0? | 0 | 0 | 0 |
| U 4 U_4 U4? | 1 | 0 | 0 |
| U 6 U_6 U6? | 1 | 1 | 0 |
| U 2 U_2 U2? | 0 | 1 | 0 |
| U 3 U_3 U3? | 0 | 1 | 1 |
| U 1 U_1 U1? | 0 | 0 | 1 |
| U 5 U_5 U5? | 1 | 0 | 1 |
| U 7 U_7 U7? | 1 | 1 | 1 |
����ʸ��Ϊ
U
o
u
t
=
2
U
d
c
3
(
s
a
+
s
b
+
e
j
2
3
��
)
U_{out}=\frac{2U_{dc}}{3}(s_a+s_b+e^{j\frac{2}{3}\pi})
Uout?=32Udc??(sa?+sb?+ej32?��)
U
d
c
U_{dc}
Udc?Ϊֱ��ĸ�ߵ�ѹ
3.FOC����
3.1.FOC�����ͼ
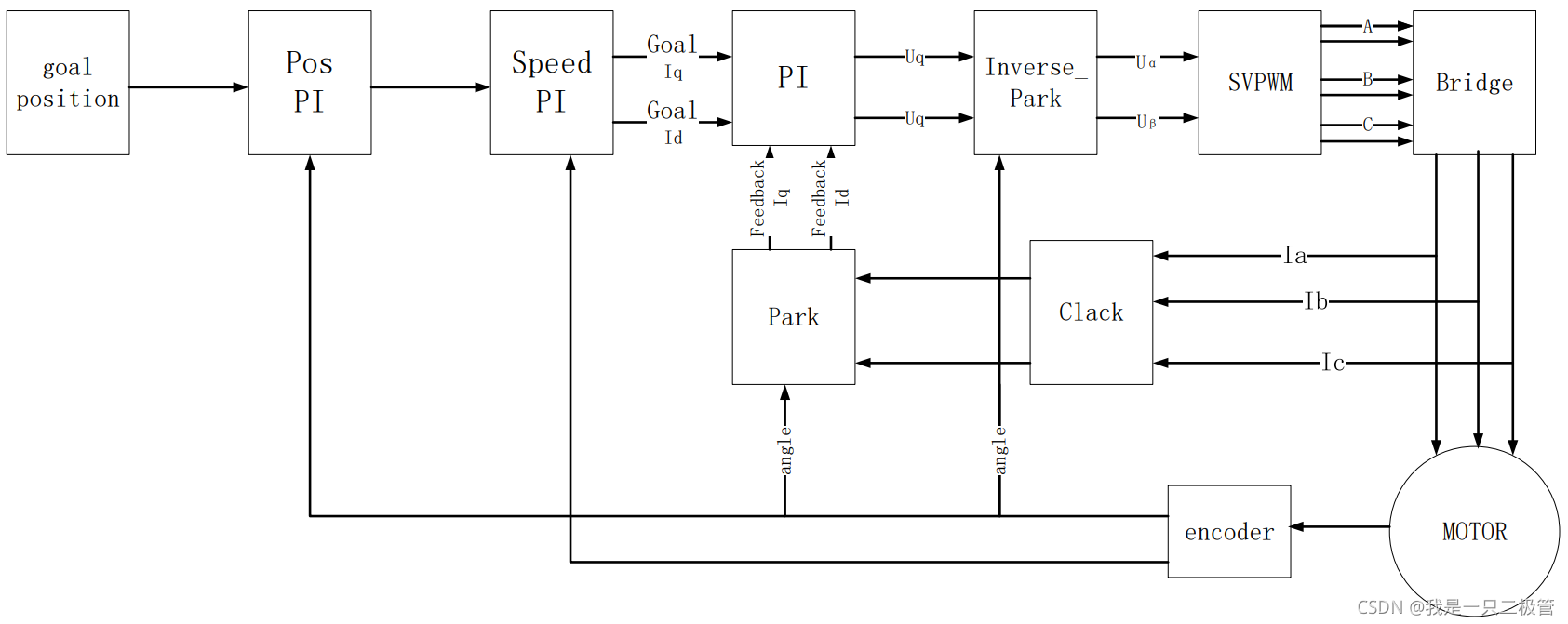
�ȿ�һ��FOC�Ŀ��ƿ�ͼ,���ڵ������λ�ñջ����ٶȱջ��������ջ�,ͨ�������ջ����Ƶ����ת��,��ͨ���ٶȱջ������Ƶ����ת�١����ͨ��λ�ñջ���������ת��λ�á�
���ƹ�������:
1�����ȶԵ��������������в����õ�
I
a
I_a
Ia?��
I
b
I_b
Ib?��
I
c
I_c
Ic?;
2��
I
a
I_a
Ia?��
I
b
I_b
Ib?��
I
c
I_c
Ic?����Clack�任�õ�
I
��
I_{\alpha}
I��?��
I
��
I_{\beta}
I��?;
3��
I
��
I_{\alpha}
I��?��
I
��
I_{\beta}
I��?����Park�任�õ�
I
q
I_{q}
Iq?��
I
d
I_{d}
Id?;
4������������ȡ���ĵ��λ��������λ��������뵽λ��PI������,�õ�Ŀ���ٶ�;
5������������ȡ���ĵ��ת����Ŀ���ٶ�������뵽�ٶ�PI������,�õ�Ŀ�����;
6����
I
q
I_{q}
Iq?��
I
d
I_{d}
Id?��Ŀ�����������뵽����PI������,�õ�������Ƶ�ѹ
U
q
U_{q}
Uq?��
U
d
U_{d}
Ud?;
7��
U
q
U_{q}
Uq?��
U
d
U_{d}
Ud?������Park�任�õ�
U
��
U_{\alpha}
U��?��
U
��
U_{\beta}
U��?;
8��
U
��
U_{\alpha}
U��?��
U
��
U_{\beta}
U��?���뵽SVPWMģ����������жϡ��ϳɿռ��ѹʸ������ѹʸ������ʱ�䡢����PWM��
9�������ɵ�PWM�����뵽����·�п���MOS�ܵĿ���״̬,���������
�����Ŀ��ƿ�ͼ��,�����õ���SVPWM,SVPWMʵ���϶�Ӧ�ڽ�������е������ѹԴ���������������һ�������˳���������С�����,���ֿ��ش���˳�����Ͻ��ڶ�����Ȧ�в��������120���Ƕȡ�ʧ���С�����Ҳ���������,��������������������ת������Ҫ�ĵĵ������Ρ������ֱ��ȥ�����������Ҳ���Ҫ�õ����Ӹ��ӵĸ߽�����,����֤ʵʱ��,��˾�Ҫͨ��һЩ����任,��ʹ�Ŀ��Ʊ�����ü�
����������һ����صı任:
3.2.Clack�任
����ͨ���Ե����������������в���,��õ�������λ��Ϊ120������Ҳ������ǽ����ཻ�������άƽ����,�õ�����������
I
a
I_a
Ia?��
I
b
I_b
Ib?��
I
c
I_c
Ic?����������������������ص�,���ǿ�����ƽ�������������Ļ�����ȥ��ʾ,���ǽ�������
I
a
I_a
Ia?��
I
b
I_b
Ib?��
I
c
I_c
Ic?ͶӰ����������,���Եõ����������Ļ�����
I
��
I_{\alpha}
I��?��
I
��
I_{\beta}
I��?���������ǵĿ�����������������Ϊ��һ�����任����Ϊ:
[
I
��
I
��
]
=
[
1
?
1
2
?
1
2
0
3
2
?
3
2
]
[
I
a
I
b
I
c
]
\left[ \begin{matrix} I_{\alpha} \\ I_{\beta} \\ \end{matrix} \right] = \left[ \begin{matrix} 1 & -\frac{1}{2} & -\frac{1}{2} \\ 0 & \frac{\sqrt{3}}{2} &-\frac{\sqrt{3}}{2} \\ \end{matrix} \right] \left[ \begin{matrix} I_{a} \\ I_{b} \\ I_{c} \\ \end{matrix} \right]
[I��?I��??]=[10??21?23????21??23???]???Ia?Ib?Ic?????
 �任ǰ��IJ�����ͼ��ʾ:
�任ǰ��IJ�����ͼ��ʾ:
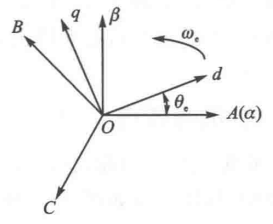
3.3.Park�任
Park�任�ǽ���ֹ����ϵ
��
?
��
\alpha-\beta
��?���任��ͬ����ת����ϵ
d
?
q
d-q
d?q,����ϵ
d
?
q
d-q
d?q�Ǹ�������������ͬ����ת��,��ʱ���ǻ�õ�
d
?
q
d-q
d?q����ϵ������ֱ����,���ڸ����������Ի��ı����Ƚ����ס�
�任��ʽ����:
I
d
=
I
��
c
o
s
(
��
c
)
+
I
��
s
i
n
(
��
c
)
I_d=I_{\alpha}cos(\theta_c)+I_{\beta}sin(\theta_c)
Id?=I��?cos(��c?)+I��?sin(��c?)
I
d
=
?
I
��
s
i
n
(
��
c
)
+
I
��
c
o
s
(
��
c
)
I_d=-I_{\alpha}sin(\theta_c)+I_{\beta}cos(\theta_c)
Id?=?I��?sin(��c?)+I��?cos(��c?)
��ת������ʽΪ:
[
I
d
I
q
]
=
[
c
o
s
��
c
s
i
n
��
c
?
s
i
n
��
c
c
o
s
��
c
]
[
I
��
I
��
]
\left[ \begin{matrix} I_{d} \\ I_{q} \\ \end{matrix} \right] = \left[ \begin{matrix} cos\theta_c& sin\theta_c\\ -sin\theta_c& cos\theta_c\\ \end{matrix} \right] \left[ \begin{matrix} I_{\alpha} \\ I_{\beta} \\ \end{matrix} \right]
[Id?Iq??]=[cos��c??sin��c??sin��c?cos��c??][I��?I��??]
��ʽ�е�
��
c
\theta_c
��c?�Ƕ�Ϊ�����������ת��ʵʱ����ת�Ƕȡ�
�任ǰ��IJ�����ͼ��ʾ:
3.4.��Park�任
��Park�任�������漴�ɵ��ķ�Park�任*�任����������ֱ������ϵת��Ϊ������������ϵ��
3.5.SVPWM�ϳ�ԭ��
����ǰ���ᵽ���������8�ֿ���ģʽ�Ͷ�Ӧ8����ѹ�ռ�ʸ��,ÿ������������������ѹʸ��,���ǿ���ͨ��������������ѹʸ��������ʱ��,�ϳɸ����������ⷽ��ĵ�ѹʸ��,�������ϳ�ԭ����
������
I
I
I��:
�ռ�ʸ���ϳ�ԭ������ͼ��ʾ:
 ����ƽ���Чԭ��õ�:
����ƽ���Чԭ��õ�:
T
s
U
o
u
t
=
T
4
U
4
+
T
6
U
6
+
T
0
(
U
0
o
r
U
7
)
T_sU_{out}=T_4U_4+T_6U_6+T_0(U_0 or U_7)
Ts?Uout?=T4?U4?+T6?U6?+T0?(U0?orU7?)
T
4
+
T
6
+
T
0
=
T
s
T_4+T_6+T_0=T_s
T4?+T6?+T0?=Ts?
U
1
=
T
4
T
s
U
4
U
2
=
T
6
T
s
U
6
\begin{matrix} U_1= \frac{T_4}{T_s} U_4 \\ U_2 = \frac{T_6}{T_s} U_6 \\ \end{matrix}
U1?=Ts?T4??U4?U2?=Ts?T6??U6??
T
4
��
T
6
��
T
0
T_4��T_6��T_0
T4?��T6?��T0?Ϊ
U
4
U_4
U4?��
U
6
U_6
U6?����ʸ��
U
0
��
U
7
U_0��U_7
U0?��U7?������ʱ�䡣
������ͼ���ǿ��Եõ�:
�O
U
o
u
t
�O
s
i
n
2
��
3
=
�O
U
1
�O
s
i
n
(
��
3
?
��
)
=
�O
U
2
�O
s
i
n
��
\frac{|U_{out}|}{sin\frac{2\pi}{3}}=\frac{|U_1|}{sin(\frac{\pi}{3}-\theta)}=\frac{|U_2|}{sin\theta}
sin32��?�OUout?�O?=sin(3��??��)�OU1?�O?=sin���OU2?�O?
����
��
\theta
��Ϊ�ϳ�ʸ������ʸ���ļнǡ�
��
�O
U
4
�O
=
�O
U
6
�O
=
2
3
U
d
c
|U_4|=|U_6|=\frac{2}{3}U_{dc}
�OU4?�O=�OU6?�O=32?Udc?��
�O
U
o
u
t
�O
=
U
m
|U_{out}|=U_m
�OUout?�O=Um?,������ʽ��:
T
4
=
3
U
m
U
d
c
T
s
s
i
n
(
��
3
?
��
)
T_4=\sqrt{3}\frac{U_m}{U_{dc}}T_ssin(\frac{\pi}{3}-\theta)
T4?=3?Udc?Um??Ts?sin(3��??��)
T
6
=
3
U
m
U
d
c
T
s
s
i
n
��
T_6=\sqrt{3}\frac{U_m}{U_{dc}}T_ssin\theta
T6?=3?Udc?Um??Ts?sin��
T
0
=
T
7
=
1
2
(
T
s
?
T
4
?
T
6
)
T_0=T_7=\frac{1}{2}(T_s-T_4-T_6)
T0?=T7?=21?(Ts??T4??T6?)
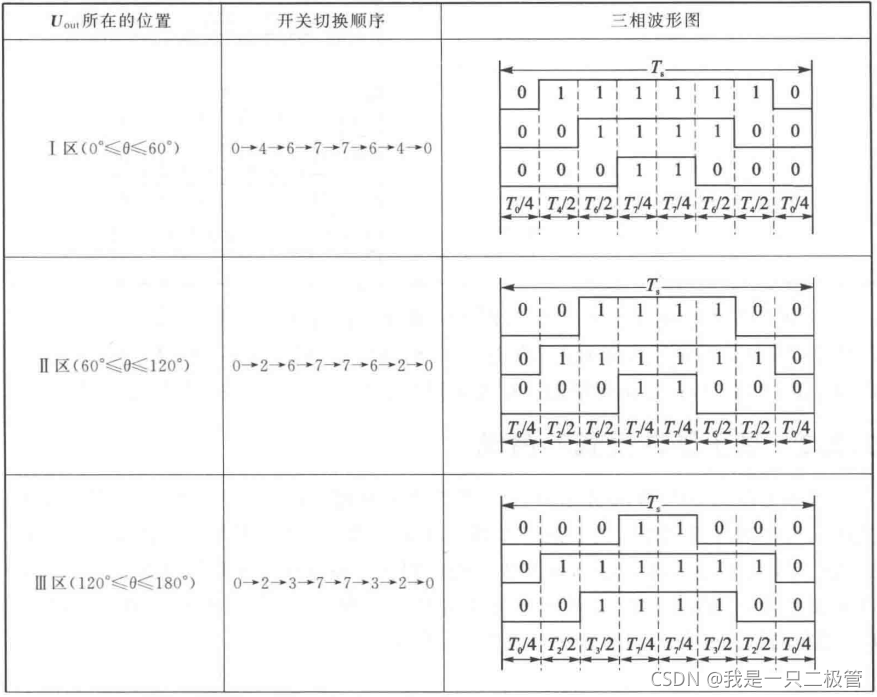
����һ�������ڸ�����ѹʸ��������ʱ��,���ž�����β���ʵ�ʵ��������Ʋ���,Ҳ���Ǹ���״̬���л�˳����SVPWM��,��ʸ����ѡ��Ƚ����,�ʵ�ѡ����ʸ��,��������ȵļ��ٿ��ش���,�����ܱ���������ڸ��ص����ϴ�ʱ�Ŀ��ض���,����ȵļ��ٿ�����ġ������߶�ʽSVPWM�㷨,������ʸ������˳��ķ���ԭ��Ϊ:
��ÿ�ο���״̬ת��ʱ,ֻ�ı�����һ��Ŀ���״̬,���Ҷ���ʸ����ʱ���Ͻ���ƽ������,ʹ�ò����ԳƵ�PWM����,�Ӷ���Ч����PWM��г��������
U
o
u
t
U_{out}
Uout?���ڵ�λ�ÿ����л�˳������:
 ��Ҫ����������PWM����,��Ҫ���һ��Ƶ�ʵ��ز��ź�,�������Dz��źš�
��Ҫ����������PWM����,��Ҫ���һ��Ƶ�ʵ��ز��ź�,�������Dz��źš�
������
I
I
I��:
��������֪����������
I
I
Iʱ�����ѹ����ʱ���л���
t
1
��
t
2
��
t
3
t_1��t_2��t_3
t1?��t2?��t3?,����ʹ�õ������ز��ź�����ͼ��ʾ,�ز��źŵ�������������Ϊһ����������
T
s
T_s
Ts?,��һ������������ʱ����ͬ���ز��ź�б��Ϊ
��
4
\frac{\pi}{4}
4��?,���������������Ƕ����Ա�ʾΪʱ�����ߡ�
 ���ǽ������ѹ����ʱ���л���
t
1
��
t
2
��
t
3
t_1��t_2��t_3
t1?��t2?��t3?ʱ�仭�������ʱ������,ͨ���Ƚ��л���ʱ�����ز��ź�ȷ���ߵ͵�ƽ(���ز��źŴ����л���ʱ��ʱΪ�ߵ�ƽ),���л���ʱ�������ز��źŵĽ���ͶӰ��������,�������Ǿ͵õ��������ѹ��PWM���Ρ�����һ��������,���������ǶԳƵ�,��Ҳ����ΪʲôҪ�������ز��źŵ�ԭ����������������Ҳ�����Ƶ��Ƶ���
���ǽ������ѹ����ʱ���л���
t
1
��
t
2
��
t
3
t_1��t_2��t_3
t1?��t2?��t3?ʱ�仭�������ʱ������,ͨ���Ƚ��л���ʱ�����ز��ź�ȷ���ߵ͵�ƽ(���ز��źŴ����л���ʱ��ʱΪ�ߵ�ƽ),���л���ʱ�������ز��źŵĽ���ͶӰ��������,�������Ǿ͵õ��������ѹ��PWM���Ρ�����һ��������,���������ǶԳƵ�,��Ҳ����ΪʲôҪ�������ز��źŵ�ԭ����������������Ҳ�����Ƶ��Ƶ���
 �����Ѿ�֪���˸��������������ѹ�ĵ�ͨʱ�䡢��ͨ˳��,���ž�Ҫ�жϵ�ǰ�����ĸ������С�
�����Ѿ�֪���˸��������������ѹ�ĵ�ͨʱ�䡢��ͨ˳��,���ž�Ҫ�жϵ�ǰ�����ĸ������С�
��
u
��
u_{\alpha}
u��?��
u
��
u_{\beta}
u��?��ʾ�ο���ѹ
U
o
u
t
U_{out}
Uout?��
��
��
��
\alpha ��\beta
���������ϵķ���,����
U
r
e
f
1
U_{ref1}
Uref1?��
U
r
e
f
2
U_{ref2}
Uref2?��
U
r
e
f
3
U_{ref3}
Uref3?��������,��:
U
r
e
f
1
=
u
��
U_{ref1}=u_{\beta}
Uref1?=u��?
U
r
e
f
2
=
3
2
u
��
?
1
2
u
��
U_{ref2}=\frac{\sqrt{3}}{2}u_{\alpha}-\frac{1}{2}u_{\beta}
Uref2?=23??u��??21?u��?
U
r
e
f
3
=
?
3
2
u
��
?
1
2
u
��
U_{ref3}=-\frac{\sqrt{3}}{2}u_{\alpha}-\frac{1}{2}u_{\beta}
Uref3?=?23??u��??21?u��?$
 �ٶ���3������A��B��C,ͨ�������ó�:
�ٶ���3������A��B��C,ͨ�������ó�:
��
U
r
e
f
1
>
0
U_{ref1}>0
Uref1?>0,��A=1,����A=0;
��
U
r
e
f
2
>
0
U_{ref2}>0
Uref2?>0,��B=1,����B=0;
��
U
r
e
f
3
>
0
U_{ref3}>0
Uref3?>0,��C=1,����C=0;
��N=4C+2B+A,����Եõ�N�������Ĺ�ϵ���±�:
N�Ĺ�ʽֻ��Ϊ���ܹ�Ψһ���ж�����,����������ʽҲ��,ֻҪ������Ψһ��Ӧ���ɡ�
| N | 3 | 1 | 5 | 4 | 6 | 2 |
|---|---|---|---|---|---|---|
| ���� | I | II | III | IV | V | VI |
���������Ѿ�֪����������ж�,������������Ҫ��
u
��
u_{\alpha}
u��?��
u
��
u_{\beta}
u��?����ʾ���������������ڵ�ѹʸ��������ʱ��,��Ϊ����������ľ���
u
��
u_{\alpha}
u��?��
u
��
u_{\beta}
u��?��������Ȼ�õ���ͼ:
u
��
=
T
4
T
s
�O
U
4
�O
+
T
6
T
s
�O
U
6
�O
c
o
s
��
3
u_{\alpha}=\frac{T_4}{T_s}|U_4|+\frac{T_6}{T_s}|U_6|cos\frac{\pi}{3}
u��?=Ts?T4??�OU4?�O+Ts?T6??�OU6?�Ocos3��?
u
��
=
T
6
T
s
�O
U
6
�O
s
i
n
��
3
u_{\beta}=\frac{T_6}{T_s}|U_6|sin\frac{\pi}{3}
u��?=Ts?T6??�OU6?�Osin3��?
�����任�õ�:
T
4
=
3
T
s
2
U
d
c
(
3
u
��
?
u
��
)
T_4=\frac{\sqrt{3}T_s}{2U_{dc}}(\sqrt{3u_\alpha}-u_{\beta})
T4?=2Udc?3?Ts??(3u��???u��?)
T
6
=
3
T
s
2
U
d
c
u
��
T_6=\frac{\sqrt{3}T_s}{2U_{dc}}u_{\beta}
T6?=2Udc?3?Ts??u��?
ͬ��,���Եõ�����������ʸ��������ʱ�䡣��:
X
=
3
T
s
2
U
d
c
u
��
X=\frac{\sqrt{3}T_s}{2U_{dc}}u_{\beta}
X=2Udc?3?Ts??u��?
Y
=
3
T
s
U
d
c
(
3
2
u
��
+
1
2
u
��
)
Y=\frac{\sqrt{3}T_s}{U_{dc}}(\frac{\sqrt{3}}{2}u_{\alpha}+\frac{1}{2}u_{\beta})
Y=Udc?3?Ts??(23??u��?+21?u��?)
Z
=
3
T
s
U
d
c
(
?
3
2
u
��
+
1
2
u
��
)
Z=\frac{\sqrt{3}T_s}{U_{dc}}(-\frac{\sqrt{3}}{2}u_{\alpha}+\frac{1}{2}u_{\beta})
Z=Udc?3?Ts??(?23??u��?+21?u��?)
���Եõ�������������ʱ�������ʾ:
| N | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| T 4 T_4 T4? | Z | Y | -Z | -X | X | -Y |
| T 6 T_6 T6? | Y | -X | X | Z | -Y | -Z |
| T 0 T_0 T0? | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 | T 0 ( T 7 ) = ( T s ? T 4 ? T 6 ) / 2 T_0(T_7)=(T_s-T_4-T_6)/2 T0?(T7?)=(Ts??T4??T6?)/2 |
���
T
4
+
T
6
>
T
s
T_4+T_6>T_s
T4?+T6?>Ts?,����Ҫ���е��ƴ���,��:
T
4
=
T
4
T
4
+
T
6
T
s
T_4=\frac{T_4}{T_4+T_6}T_s
T4?=T4?+T6?T4??Ts?
T
6
=
T
6
T
4
+
T
6
T
s
T_6=\frac{T_6}{T_4+T_6}T_s
T6?=T4?+T6?T6??Ts?
������Ҫȷ�������������л���ʱ��
���ȶ���:
T
a
=
(
T
s
?
T
4
?
T
6
)
/
4
T_a=(T_s-T_4-T_6)/4
Ta?=(Ts??T4??T6?)/4
T
b
=
T
a
+
T
4
/
2
T_b=T_a+T_4/2
Tb?=Ta?+T4?/2
T
c
=
T
b
+
T
6
/
2
T_c=T_b+T_6/2
Tc?=Tb?+T6?/2
�������ѹ����ʱ���л���
t
1
t_1
t1?��
t
2
t_2
t2?��
t
3
t_3
t3?�����������ϵ���±�:
| N | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| t 1 t_1 t1? | T b T_b Tb? | T a T_a Ta? | T a T_a Ta? | T c T_c Tc? | T c T_c Tc? | T b T_b Tb? |
| t 2 t_2 t2? | T a T_a Ta? | T c T_c Tc? | T b T_b Tb? | T b T_b Tb? | T a T_a Ta? | T c T_c Tc? |
| t 3 t_3 t3? | T c T_c Tc? | T b T_b Tb? | T c T_c Tc? | T a T_a Ta? | T b T_b Tb? | T a T_a Ta? |
�ܽ�SVPWM,��Ҫʵ���˲ο���ѹʸ���������жϡ�������������ʸ������ʸ������ʱ��ļ����Լ���������ʸ���л����ȷ��,���ʹ��һ��Ƶ�ʵ������ز��ź�����������л�����бȽ�,�Ӷ������任������Ҫ��PWM����
����FOCʸ�����Ʒ���
1.ģ�����
1��Clack�任,������������Ϊ������������,����ɼ����ĵ�����ཻ���硣
 2��Park�任,������������������Ϊ��������ֱ����,���뵱ǰ��Clack�仯������ཻ�����Լ���ǰ�ĵ���Ƕȡ�
2��Park�任,������������������Ϊ��������ֱ����,���뵱ǰ��Clack�仯������ཻ�����Լ���ǰ�ĵ���Ƕȡ�
 3��Park���任,������Ŀ��Ƶ�ѹ�C����ֱ����ѹ��Ϊ���ཻ����ѹ,����Ŀ��
v
d
v_d
vd?��
v
q
v_q
vq?�Լ���ǰ�ĵ���Ƕȡ�
3��Park���任,������Ŀ��Ƶ�ѹ�C����ֱ����ѹ��Ϊ���ཻ����ѹ,����Ŀ��
v
d
v_d
vd?��
v
q
v_q
vq?�Լ���ǰ�ĵ���Ƕȡ�
 4��ͨ�������
U
a
l
p
h
a
U_{alpha}
Ualpha?��
U
b
e
t
a
U_{beta}
Ubeta?���жϵ�ǰ����������
4��ͨ�������
U
a
l
p
h
a
U_{alpha}
Ualpha?��
U
b
e
t
a
U_{beta}
Ubeta?���жϵ�ǰ����������
 5�������м����,�������������������ʸ��������ʱ��,����
U
a
l
p
h
a
U_{alpha}
Ualpha?��
U
b
e
t
a
U_{beta}
Ubeta?,PWM�Ŀ�������
T
s
T_s
Ts?��ֱ�����ѹ
U
d
c
U_{dc}
Udc?
5�������м����,�������������������ʸ��������ʱ��,����
U
a
l
p
h
a
U_{alpha}
Ualpha?��
U
b
e
t
a
U_{beta}
Ubeta?,PWM�Ŀ�������
T
s
T_s
Ts?��ֱ�����ѹ
U
d
c
U_{dc}
Udc?
 6���������㵱ǰ����,��������ѹʸ��������ʱ�������뵱ǰ������N,XYZ�м������PWM�Ŀ�������
T
s
T_s
Ts?��
6���������㵱ǰ����,��������ѹʸ��������ʱ�������뵱ǰ������N,XYZ�м������PWM�Ŀ�������
T
s
T_s
Ts?��
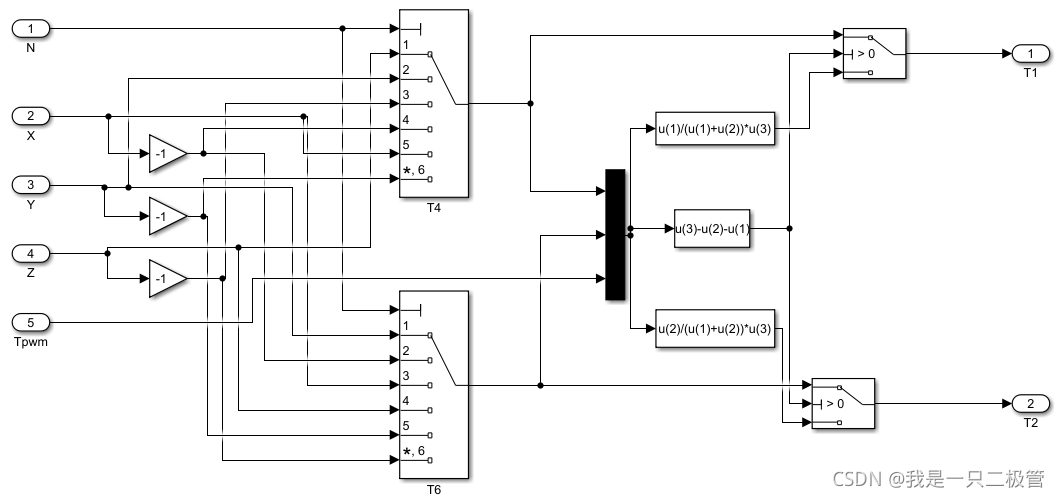
7������ʸ���л����ȷ��,���뵱ǰ������N,��������ѹʸ��������ʱ��
T
1
T_1
T1?��
T
2
T_2
T2?��PWM��������
T
s
T_s
Ts?��
 8������PWM��,���������ز��ź�,�źŵ�����ΪPWM���ص�����;����ʸ���л���
P
1
P_1
P1?��
P
2
P_2
P2?��
P
3
P_3
P3?����������·��ÿ�����ŵ������������ܹ�ͬʱ��ͨ,����ֻ��Ҫ���ϰ��ŵ�PWM����ȡ�����ɡ�
8������PWM��,���������ز��ź�,�źŵ�����ΪPWM���ص�����;����ʸ���л���
P
1
P_1
P1?��
P
2
P_2
P2?��
P
3
P_3
P3?����������·��ÿ�����ŵ������������ܹ�ͬʱ��ͨ,����ֻ��Ҫ���ϰ��ŵ�PWM����ȡ�����ɡ�
 9��PMSM�綯��ģ��,
T
m
T_m
Tm?Ϊ����Ť��,ABCΪ�����ѹ,����mΪ�������ź�,��ͨ��
B
u
s
s
e
l
e
c
t
e
r
Busselecter
Busselecterģ������ź�ѡ��
9��PMSM�綯��ģ��,
T
m
T_m
Tm?Ϊ����Ť��,ABCΪ�����ѹ,����mΪ�������ź�,��ͨ��
B
u
s
s
e
l
e
c
t
e
r
Busselecter
Busselecterģ������ź�ѡ��
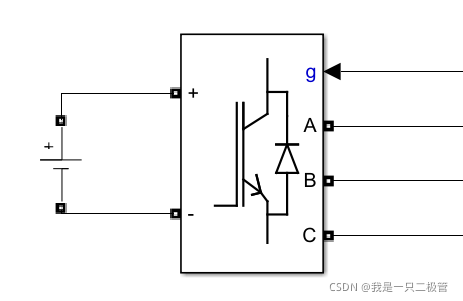
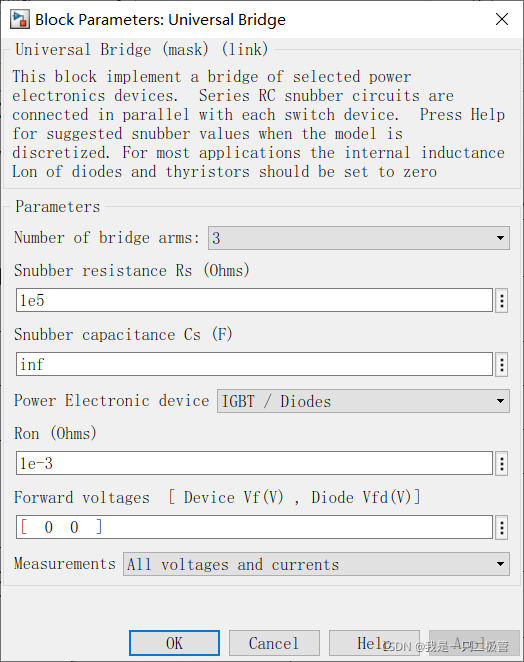
 10��ͨ�õĵ���ģ��,ѡ�������ű�,����gΪ6��PWM����
10��ͨ�õĵ���ģ��,ѡ�������ű�,����gΪ6��PWM����
2.simulink����
 ��ͼΪ����λ�ñջ����ٶȱջ��������ջ��ķ���ͼ
��ͼΪ����λ�ñջ����ٶȱջ��������ջ��ķ���ͼ
 ��ͼΪ�����ٶȱջ��������ջ��ķ���ͼ
��ͼΪ�����ٶȱջ��������ջ��ķ���ͼ
����simulink�������ϴ�,��������
FOCʸ�����Ʒ���
3.������
3.1. ��������
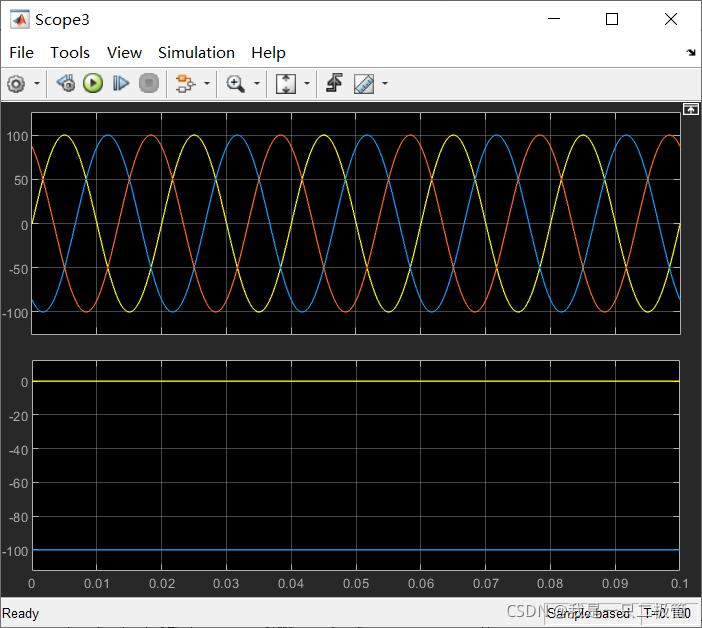
�趨�ٶȺ㶨Ϊ800rad/s
 ��ɫ�ٶ���Ϊ����ĺ���״̬,��ɫ��Ϊ������ٶȸ�������,��1.5s������ܵ������ص�����,�ٶ���С��Χ����,���ܿ�������趨�ٶȡ�
��ɫ�ٶ���Ϊ����ĺ���״̬,��ɫ��Ϊ������ٶȸ�������,��1.5s������ܵ������ص�����,�ٶ���С��Χ����,���ܿ�������趨�ٶȡ�
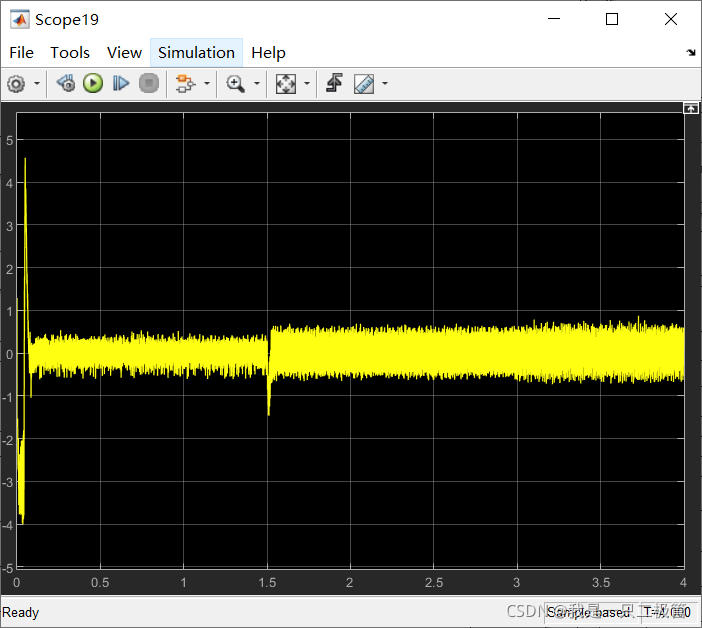
 ��ͼΪ�ɼ���������ཻ����ı仯���,��1.5sʱ����ܵ�����������,���ཻ�����ֵҲ�����仯��
��ͼΪ�ɼ���������ཻ����ı仯���,��1.5sʱ����ܵ�����������,���ཻ�����ֵҲ�����仯��
 ��ͼΪ���ཻ����ľֲ��Ŵ�ͼ��
��ͼΪ���ཻ����ľֲ��Ŵ�ͼ��
��ͼΪ
I
d
I_d
Id?�����仯ͼ
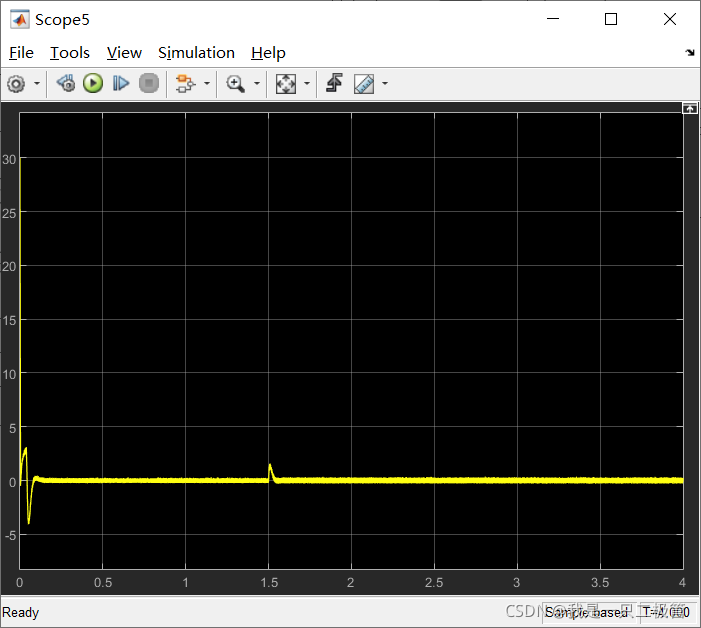
��ͼΪ
I
q
I_q
Iq?�����仯ͼ
 ��ͼΪPark���任������
U
��
U_{\alpha}
U��?���ѹ�仯����
��ͼΪPark���任������
U
��
U_{\alpha}
U��?���ѹ�仯����
 ��ͼΪPark���任������
U
��
U_{\beta}
U��?���ѹ�仯����
��ͼΪPark���任������
U
��
U_{\beta}
U��?���ѹ�仯����
 ��ͼΪ����ѡ��任ͼ
��ͼΪ����ѡ��任ͼ
 ��ͼΪ�����ѹ�л���ʱ���л���
��ͼΪ�����ѹ�л���ʱ���л���
3.2.��������
�趨�ٶ�Ϊ
1000
s
i
n
(
��
2
t
)
1000sin(\frac{\pi}{2}t)
1000sin(2��?t)rad/s
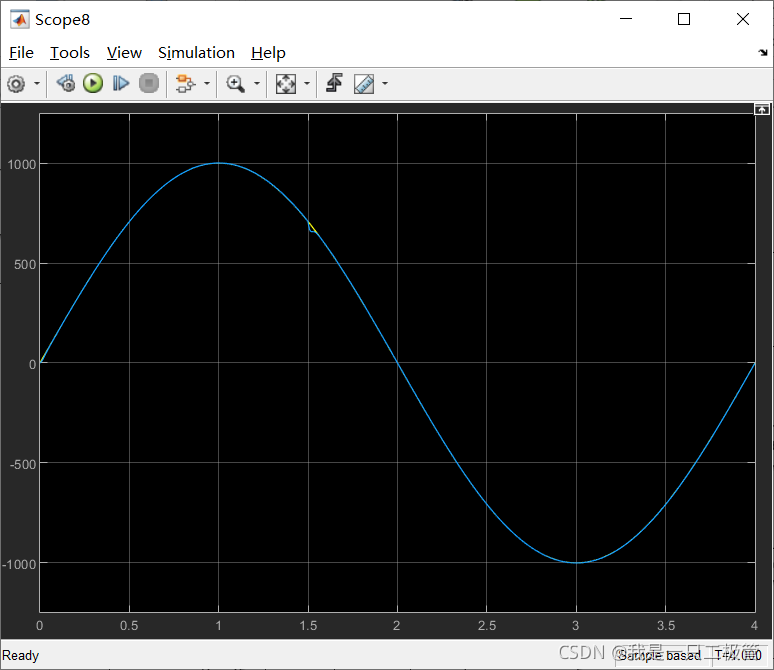
��ͼΪ�ٶȸ�������
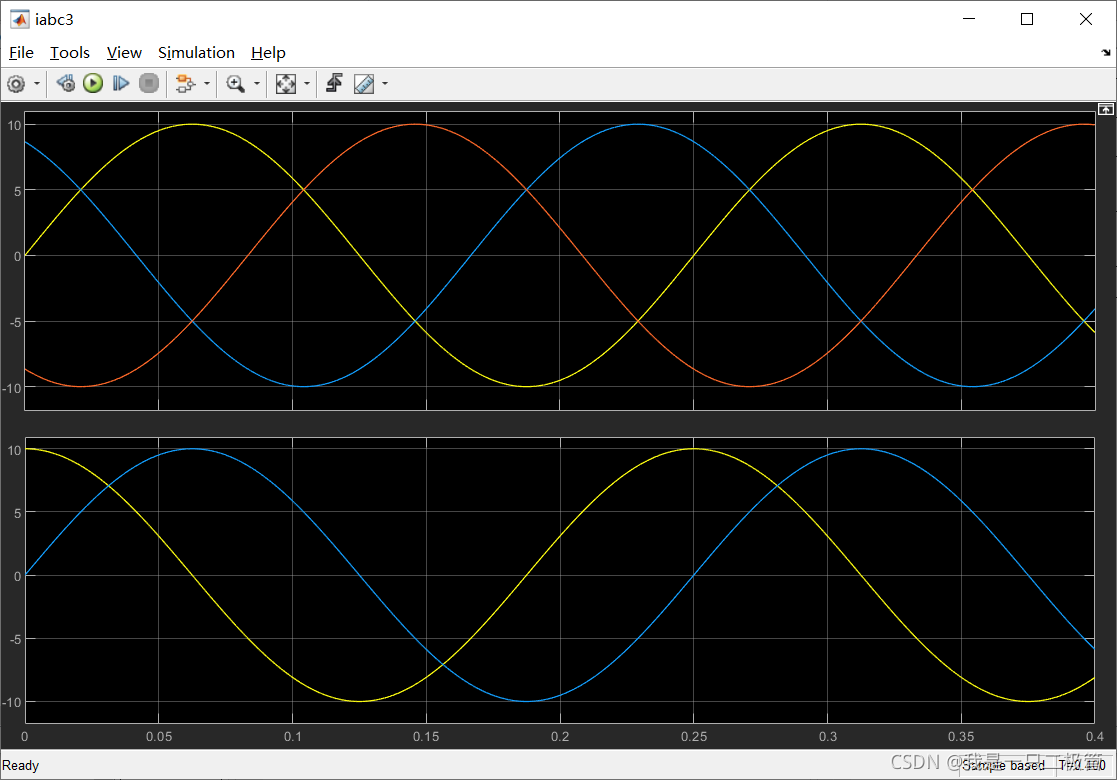
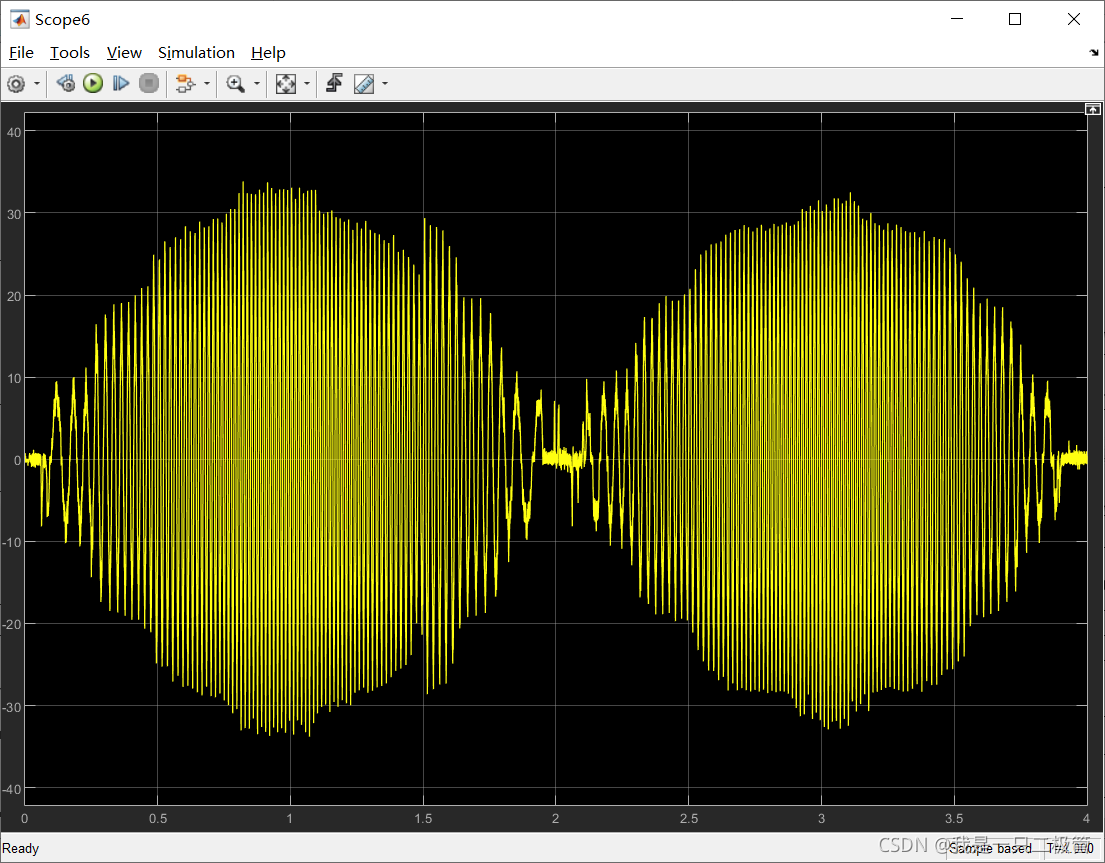
 ��ͼΪ���ཻ����仯����
��ͼΪ���ཻ����仯����
 ��ͼΪ
I
d
I_d
Id?�����仯ͼ
��ͼΪ
I
d
I_d
Id?�����仯ͼ
 ��ͼΪ
I
q
I_q
Iq?�����仯ͼ
��ͼΪ
I
q
I_q
Iq?�����仯ͼ
��ͼΪPark���任������
U
��
U_{\alpha}
U��?���ѹ�仯����
 ��ͼΪPark���任������
U
��
U_{\beta}
U��?���ѹ�仯����
��ͼΪPark���任������
U
��
U_{\beta}
U��?���ѹ�仯����
 ��ͼΪ����ѡ��任ͼ
��ͼΪ����ѡ��任ͼ
 ��ͼΪ�����ѹ�л���ʱ���л���
��ͼΪ�����ѹ�л���ʱ���л���
3.2. ����ָ��λ��
�趨Ŀ��λ��Ϊ��
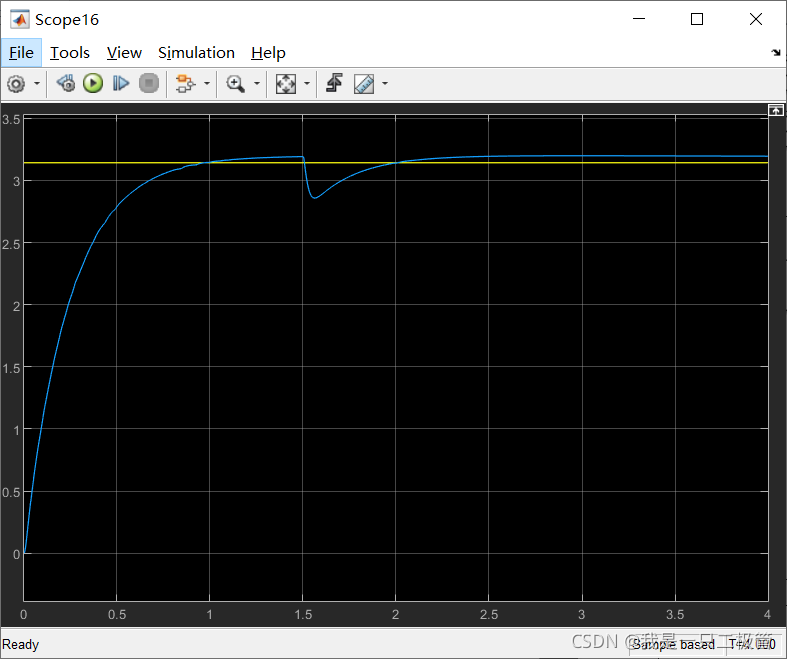
��ͼΪλ�ø���ͼ,1.5s���ܵ�����������,��2.5�봦�����ȶ�λ�á� ��ͼΪ�ٶȸ���ͼ,1.5s���ܵ�����������
��ͼΪ�ٶȸ���ͼ,1.5s���ܵ�����������
 ��ͼΪ���ཻ����任ͼ
��ͼΪ���ཻ����任ͼ
�ܽ�
���۸㶨!!!!!
�ο�:�ִ�����ͬ���������ԭ����MATLAB����