Ros学习笔记(六):――各部分代码实现
? ???基于之前几篇博客的基础,我们这次来讲解如何实现各类型的代码,这里用C++和python演示。
文章目录
1.publisher的编程实现
(C++部分)
? ???首先,我们先展视这次所需要用到的代码:
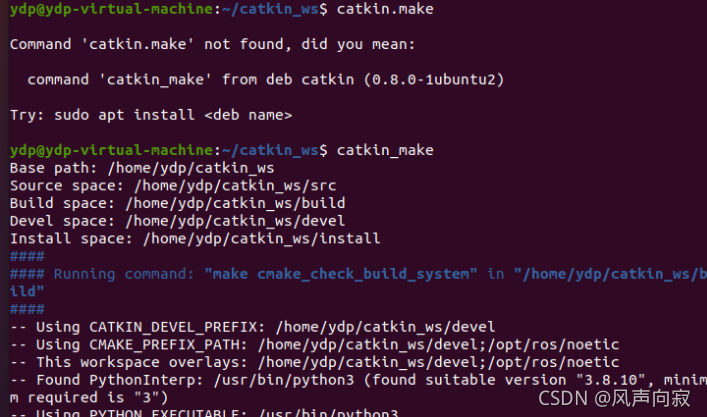
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roscore
rosrun turtlesim turtlesim_node
rosrun learning velocity_publisher
???我们先创建对应的功能包(learning):
catkin create pkg learning roscpp rospy std_msgs geometry_msgs turtlesim
???创建如下功能包:

随后在learning文件中的src下建立如下c++代码文件
代码:
/**
* 发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist,实现海龟的绕圈运动
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
//管理节点的api等 用于管理节点功能
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10 此时发送和订阅的话题名一定要一样否则程序无法正常启用
//队列长度不对应容易丢参数
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率 不能太快否则数据传不出去
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
//设置海龟速度和角速度
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
//相当于print
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}

? ???代码完成后,就是编译了,但是在这之前我们还要去修改learning文件中的cmake文件(编译规则)。
在图示位置加入如下代码(把ros的可执行文件和相关库做链接):
? ???add_executable(velocity_publishersrc/velocity_publisher.cpp)
? ???target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z0Dl8PRA-1637847094815)(C:\Users\Smile\AppData\Roaming\Typora\typora-user-images\image-20211124195714140.png)]](https://img-blog.csdnimg.cn/f34a44f49e1a40c3bf67dc80653e2a30.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA6aOO5aOw5ZCR5a-C,size_20,color_FFFFFF,t_70,g_se,x_16)
(注意:这里如果报错 _topic.msg找不到,则删除下图中的topic)

先输入:
? ???????????????????????? cd ~/catkin_ws
进入相应的文件路径下。
? ????????????????????????catkin_make
随后输入:
? ??????????????????source devel/setup.bash
设置环境变量。
如果觉得每次都需要配置环境变量复杂,则可以在Cmake文件里加配置。
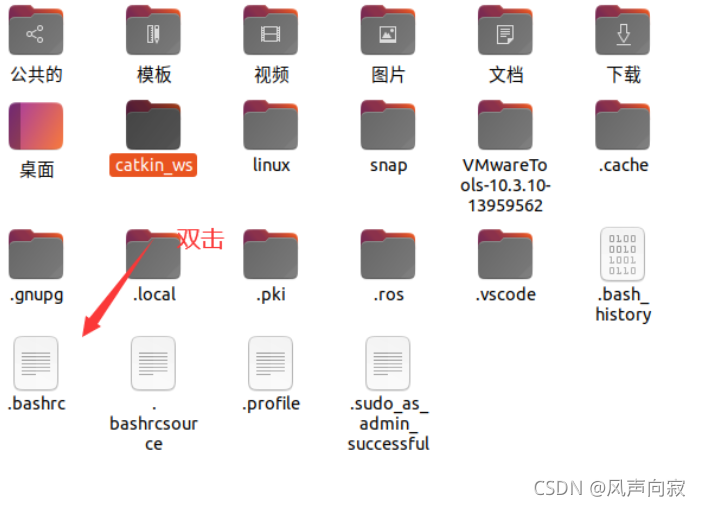
(隐藏文件用快捷键Ctrl + H调出)

随后加入如上代码。
? ?????????????????source / home/ydp/catkin_ws /devel/setup.bash
如果再打开命令行出现错误,则文件路径出错。
随后,先运行 ????????????????? roscore

随后,
? ?????????????????输入: rosrun turtlesim turtlesim_node
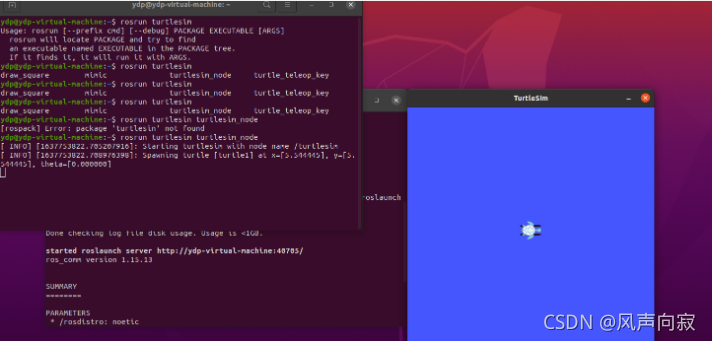
调出小乌龟。
随后:
? ?????????????????rosrun learning velocity_publisher
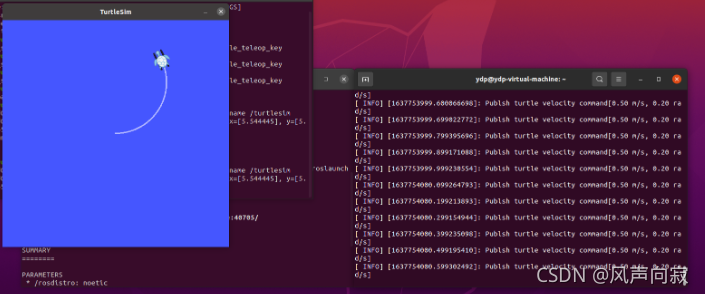
(编译我们的代码文件,效果如上)
(python部分):
? ???src下继续创建.py文件(注意:python语言不需要编译,不用去改Cmake文件)
代码如下:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
随后还是启动:
? ??????????????????????????????roscore
? ????????????????????????rosrun turtlesim turtlesim_node
调用小乌龟,随后:
? ???????????????????输入:rosrun learning velocity_publisher
(注意:这里不是按回车,是按两下Tab键)

再输入: ?????????rosrun learning velocity_publisher .py
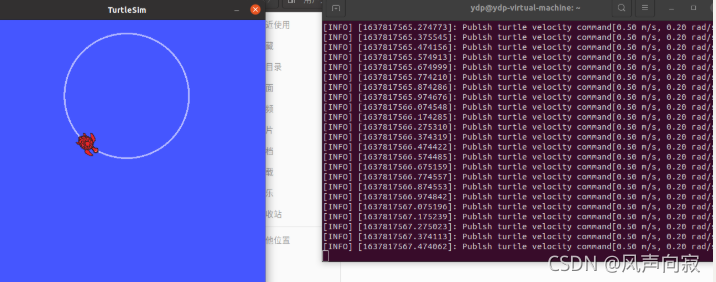
以上就是Publisher全部部分。
2.Subscriber实现
(c++部分):
代码如下:
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
? ????因为Subscriber不知道什么时候会有Publisher的消息传入进来,所以需要给一个回调函数 poseCallback(),让消息一进来就可以反应。
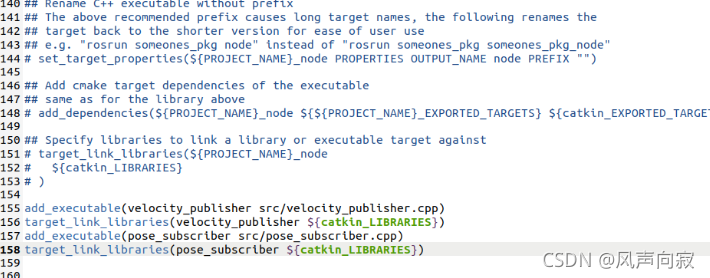
? ????同Publisher一样,我们要到Cmake文件中配置对应的C++编译规则。
输入:
? ????add_executable(pose_subscriber src/pose_subscriber.cpp)
? ????target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
如图:
重新编译: ????????????catkin_make

调用小乌龟:
? ????????????????????????rosrun turtlesim turtle (加两个tap键)
? ????????????????????????rosrun turtlesim turtlesim_node

调用函数:
? ????????????????????????rosrun learning pos_subscriber

此时输入:
? ?????????????????rosrun turtlesim turtle_teleop_key 就可以移动小海龟了
此时我们Subcriber函数调出的命令行信息也会不断更新。
(Python实现):
代码
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS节点初始化
rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
pose_subscriber()
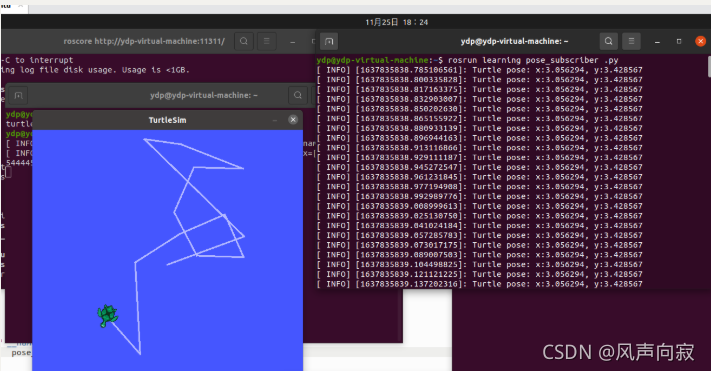
还是跟上述一样,将小海龟调出后,输入
? ????????????????????????rosrun learning pose_subscriber .py
效果如下:
3.话题消息的定义与使用
首先输入: ?????????????????torch person.msg
? ????????????????????????创建person.msg文件。
文件中写入如下内容:
string nane
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 fenale = 2
可在命令行输入torch person.msg创建(在learning中创建一个msg文件,再进入文件夹中输入此命令)
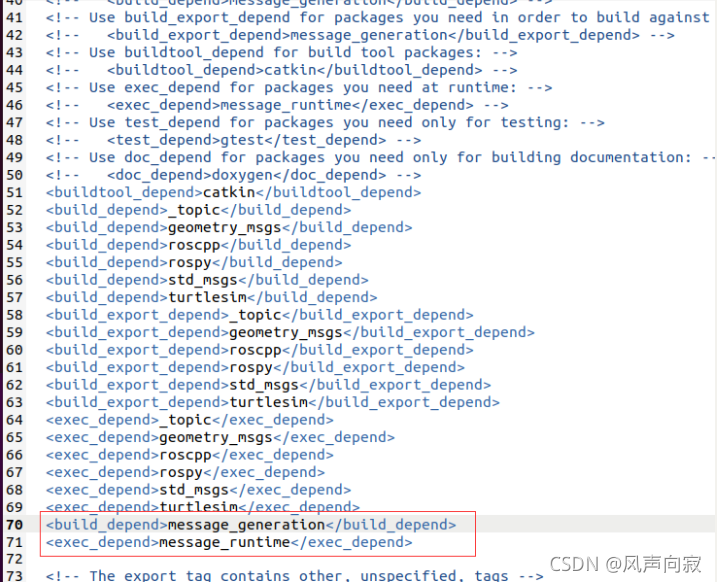
在package包内添加如下(动态、运行)依赖:
? ?????????????????<build_depend>message_generation</build_depend>
? ?????????????????<exec_depend>message_runtime</exec_depend>
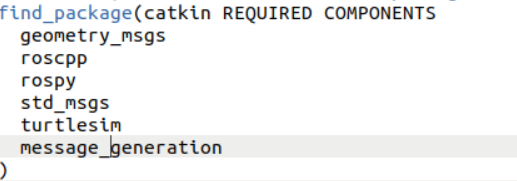
打开Cmake文件:
加入如下:
? ?????????????????message_generation
随后加:
? ?????????????????add_message_files(FILES person.msg)
? ?????????????????generate_messages(DEPENDENCIES std_msgs)
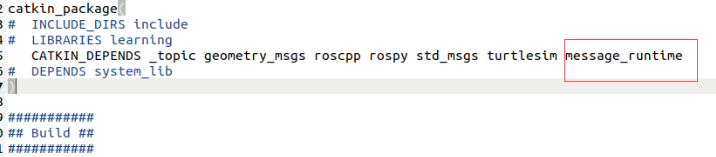
再加:
? ?????????????????message_runtime
随后重新 catkin_make编译一次。
(如果如上操作有报错,先检查括号和字母大小写有无错误)
查看生成的头文件:

创建代码文件:
(注意:本来应该是name被我打成nane了,本人比较懒就没改,大家注意对应的位置改改)
person_subscriber.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning/person.h"
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning::person::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Subcribe person Info: name:%s age:%d sex:%d",
msg->nane.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
person_publisher.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning/person.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
ros::Publisher person_info_pub = n.advertise<learning::person>("/person_info", 10);
// 设置循环的频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok())
{
// 初始化learning_topic::Person类型的消息
learning::person person_msg;
person_msg.nane = "Tom";
person_msg.age = 18;
person_msg.sex = learning::person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.nane.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
Cmake文件加入如下代码:
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber${PROJECT_NAME}_generate_messages_cpp)
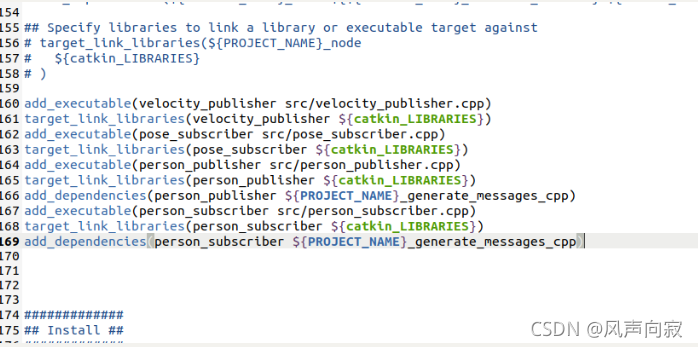
因为我们的数据是动态生成的所以多出那就add语句让动态软件与文件关联。
首先老套入输入: ????????????????? roscore
随后输入: ????????????????? rosrun learning person_subcriber
? ??????????????????????????? rosrun learning person_publisher

就可建立两者的连接。
(注意:此时就算关掉roscore二者还是会继续传输,因为节点管理器只负责配对,不负责连接)
(python实现):
person_publisher:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning.msg import person
def velocity_publisher():
# ROS节点初始化
rospy.init_node('person_publisher', anonymous=True)
# 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
person_info_pub = rospy.Publisher('/person_info', person, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化learning_topic::Person类型的消息
person_msg = person()
person_msg.nane = "Tom";
person_msg.age = 18;
person_msg.sex = person.male;
# 发布消息
person_info_pub.publish(person_msg)
rospy.loginfo("Publsh person message[%s, %d, %d]",
person_msg.nane, person_msg.age, person_msg.sex)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
person_subscriber:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning.msg import person
def personInfoCallback(msg):
rospy.loginfo("Subcribe Person Info: name:%s age:%d sex:%d",
msg.name, msg.age, msg.sex)
def person_subscriber():
# ROS节点初始化
rospy.init_node('person_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
rospy.Subscriber("/person_info", person, personInfoCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
person_subscriber()
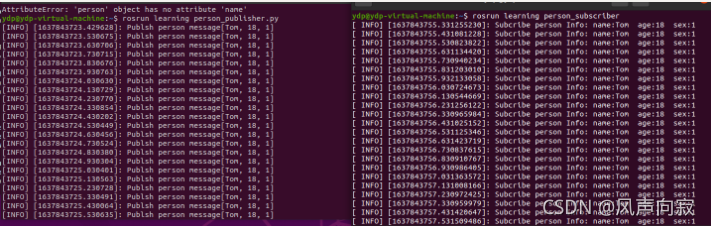
随后输入:
? ??????????????????????????????????roscore
? ?????????????????rosrun learning person_publisher.py
? ?????????????????rosrun learning person_subscreber.py
4.客户端Client的编程实现
(C++实现);
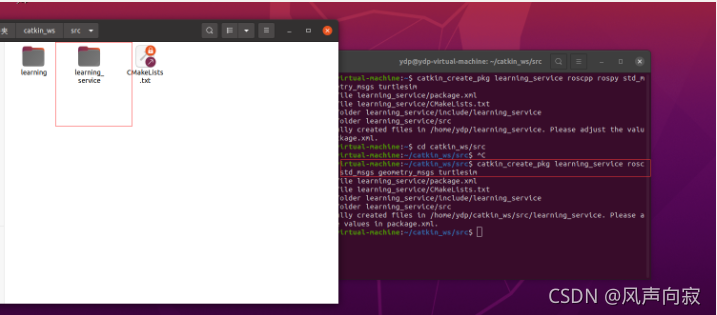
首先,为了分别区分,我们来创建一个新的功能包:
输入:
? ?????????????????cd catkin_ws/src(进入路径)
? catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim(安装功能包)
随后创建文件:
turtle_spawn.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
随后同样的配置Cmake
? ?????????????????add_executable(turtle_spawn src/turtle_spawn.cpp)
? ?????????????????target_link_libraries(turtle_spawn ${catkin_LIBRARIES})

随后:
? ?????????????????日常 carkin_make
? ????????????????? roscore
开启小乌龟: rosrun turtlesim turtlesim_node
? ????输入: rosrun learning_service turtle_spawn

其中,第一个INFO是 发送请求service
? ?????第二个INFO是 发送回复
(python实现):

(别忘了。)
代码:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():
# ROS节点初始化
rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/spawn')
try:
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
return response.name
except rospy.ServiceException as e:
print ("Service call failed: %s"%e)
if __name__ == "__main__":
#服务调用并显示调用结果
print ("Spwan turtle successfully [name:%s]" %(turtle_spawn()))
随后输入 ????roscore
? ????????????rosrun turtlesim turtlesim_node
? ????????????rosrun learning_service turtle_spawn.py

11.24 学习笔记
ROS学习笔记(五)――工作空间和功能包_风声向寂的博客-CSDN博客
ROS学习笔记(四)――ROS命令行工具使用讲解_风声向寂的博客-CSDN博客
ROS学习笔记(三)――ROS的简单了解_风声向寂的博客-CSDN博客