FCOSR�����Ķ��ʼ�
(һ) Title

���ĵ�ַ:https://arxiv.org/abs/2111.10780
��Ŀ��ַ:https://github.com/lzh420202/FCOSR
(��) Summary
�����:
���еĻ���anchor-based��������ת�����㷨��Ҫ�ֶ�����Ԥ���,�����˶���ij������ͼ��㡣����anchor-free�ķ���ͨ�����и��ӵ���ϵ�ṹ,�����ײ���
���ķ���:
���������һ��һ�εĴ��нǶ���ת�ļ����FCOSR,һ�����ǻ���FCOS�ܹ�,���ҽ���ά��˹�ֲ�Ҳ��������ˡ����������Ҫ��ע������ѵ�������е�label assignment����,����:
- ����ellipse center sampling����������ת��(oriented bounding boxes)����һ�����ʵIJ�������
- ����overlapping��Ŀ������,ͨ��fuzzy sample assignment�ṩ��һ�����Ӻ����ı�ǩ��
- ͨ��multi-level samplingģ�����˲���ֲ��������⡣
ʵ��Ч��:
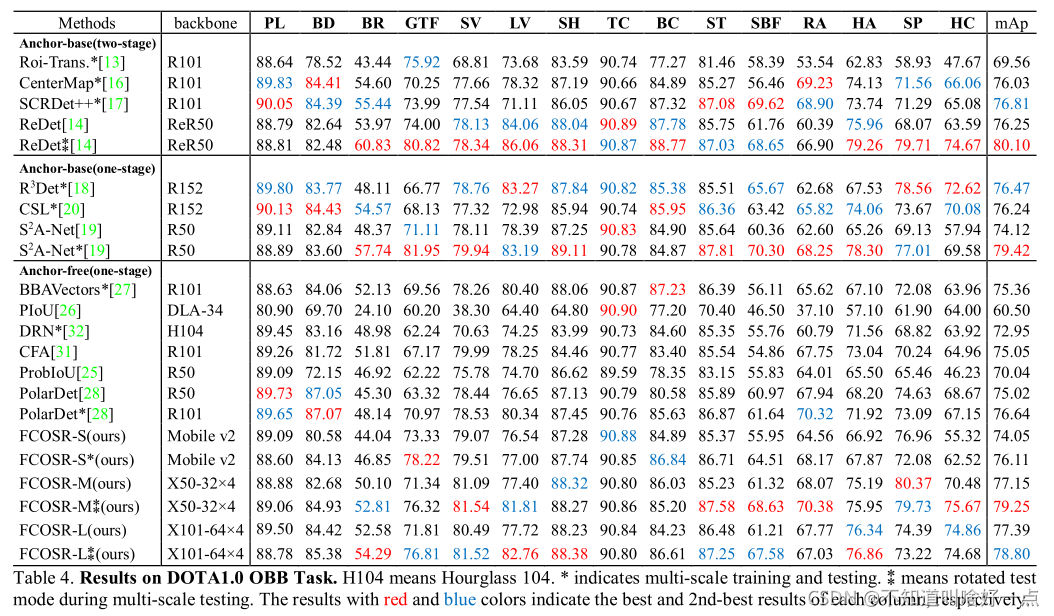
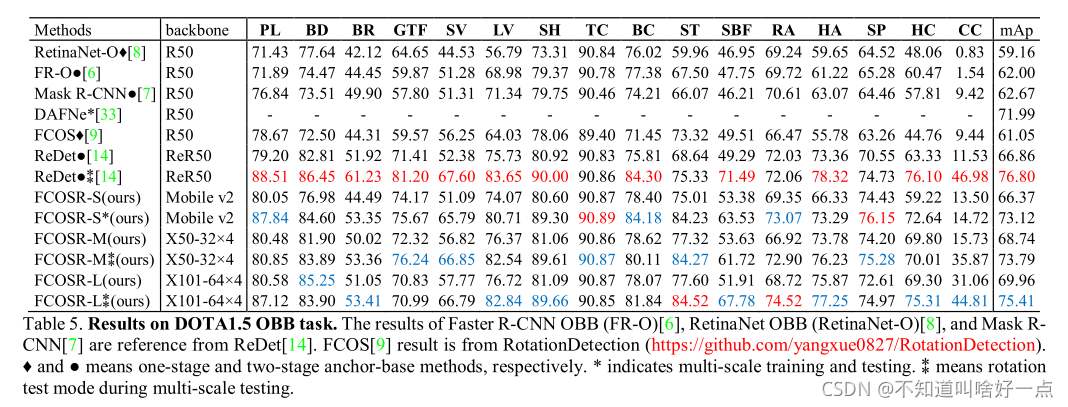
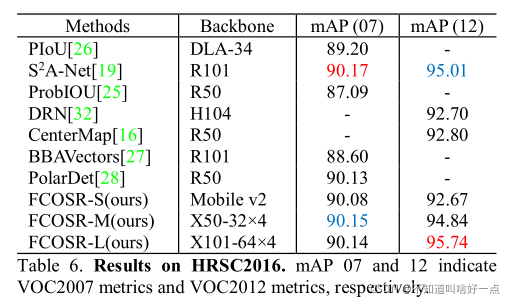
�㷨��DOTA1.0,DOTA1.5�Լ�HRSC2016���ݼ��ϵ�map�ֱ�Ϊ79.27,75.41�Լ�90.15��FCOSR��one-stage������������Ŀ��������
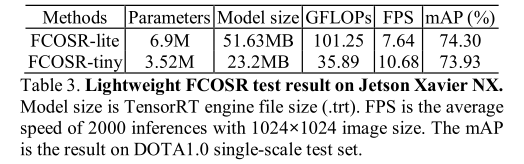
��һ����������ת����TensorRT��ʽ,��Jetson Xavier NX�Ͻ��в���,��DOTAv1��10.68FPS,ʵ����73.93��mAP.
(��) Method

�������FCOS�ܹ�,ֱ��Ԥ�����ĵ�,�����Լ���ת�Ƕȡ�ͨ��label assignment module��������ͼ�����,ȥ����centerness��֧��
3.1 �������
���������֧,�����֧��һ�� C C Cά���������,�ع��֧����һ��5ά������,���5ά�����ķ��ű�ʾΪ ( R e g x , R e g y , R e g w , R e g h , R e g �� ) (Reg_x,Reg_y,Reg_w,Reg_h,Reg_\theta) (Regx?,Regy?,Regw?,Regh?,Reg��?),��Ҫ�����任�õ����ձ߽�� ( o f f s e t x , o f f s e t y , w , h , a n g l e ) (offset_x,offset_y,w,h,angle) (offsetx?,offsety?,w,h,angle),���ҶԱ߽���Ҫ����ƫ���������Ǹ���,���߱���������,�Ƕȷ�Χ����������0-90�����ع��֧����任�����ձ߽��ļ��㹫ʽΪ:
?offset? x y = Reg ? x y ? k ? s w h = ( Elu ? ( Reg ? w h ? k ) + 1 ) ? s �� = Mod ? ( Reg ? �� , �� / 2 ) \begin{array}{l} \text { offset }_{x y}=\operatorname{Reg}_{x y} \cdot k \cdot s \\ w h=\left(\operatorname{Elu}\left(\operatorname{Reg}_{w h} \cdot k\right)+1\right) \cdot s \\ \theta=\operatorname{Mod}\left(\operatorname{Reg}_{\theta}, \pi / 2\right) \end{array} ?offset?xy?=Regxy??k?swh=(Elu(Regwh??k)+1)?s��=Mod(Reg��?,��/2)?
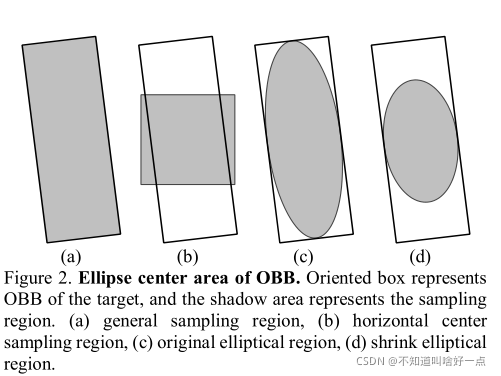
3.2 ��Բ���IJ���
Center Sampling�ǽ������㼯�е�Ŀ�����ĸ���,�����ڼ��ٵ�����Ԥ��,���ģ�����ܡ���FCOS�Լ�YOLOX�ж����øò��������˾��ȡ�Ȼ����ˮƽ���IJ�������ֱ��Ǩ�Ƶ���ת���д�������������:
- ˮƽ��IJ�������ͨ��Ϊ 3 �� 3 3 \times 3 3��3���� 5 �� 5 5 \times 5 5��5��������,��ת��ĽǶȻ�Ӱ�������Χ
- ���ڳ����Ƚϴ�ı߽����˵,�̱����������IJ����ķ�Χ,�����Ҿ��������IJ�����Χ����,�ᳬ���߽��
Ϊ�˽��������������,��������˻��ڶ�ά��˹�ֲ�����Բ���IJ�������,������ת���������һ����ά�ĸ�˹�ֲ�:
�� = R �� ? �� 0 ? R �� I �� = ( c x , c y ) R �� = [ cos ? �� ? sin ? �� sin ? �� cos ? �� ] , �� 0 = 1 12 [ w 2 0 0 h 2 ] \begin{aligned} \Sigma &=R_{\theta} \cdot \Sigma_{0} \cdot R_{\theta}^{I} \\ \mu &=(c x, c y) \\ R_{\theta} &=\left[\begin{array}{cc} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{array}\right], \Sigma_{0}=\frac{1}{12}\left[\begin{array}{cc} w^{2} & 0 \\ 0 & h^{2} \end{array}\right] \end{aligned} ����R��??=R��??��0??R��I?=(cx,cy)=[cos��sin��??sin��cos��?],��0?=121?[w20?0h2?]?
���� �� \Sigma ����Э�������,���Ƕ�Ϊ0ʱ �� 0 \Sigma_0 ��0?Ҳ��Э�������, �� \mu ���Ǿ�ֵ, R �� R_\theta R��?����ת�任������������µĶ�ά��˹�ֲ������ܶȺ���Ϊ:
f ( X ) = 1 2 �� �O �� �O 1 / 2 exp ? ( ? 1 2 ( X ? �� ) T �� ? 1 ( X ? �� ) ) f(X)=\frac{1}{2 \pi|\Sigma|^{1 / 2}} \exp \left(-\frac{1}{2}(X-\mu)^{T} \Sigma^{-1}(X-\mu)\right) f(X)=2���O���O1/21?exp(?21?(X?��)T��?1(X?��))
X X X��ʾ��ά����,����һ����ȥ���õ�:
g ( X ) = exp ? ( ? 1 2 ( X ? �� ) T �� ? 1 ( X ? �� ) ) g(X)=\exp \left(-\frac{1}{2}(X-\mu)^{T} \Sigma^{-1}(X-\mu)\right) g(X)=exp(?21?(X?��)T��?1(X?��))
��Բ��2D��˹�ֲ���ʾΪ g ( X ) = C g(X)=C g(X)=C���б�ʾ,�� C = C 0 = exp ? ( ? 1.5 ) C=C_{0}=\exp (-1.5) C=C0?=exp(?1.5)ʱ,��Բ�ĵȸ��߸ոպ��ܹ��е���ת����,Ҳ��������ͼ�� ( c ) (c) (c)��ʾ������ C C C�ļ�С,��Բ���ߵķ�Χ������
�� C C C�ķ�Χ�� [ C 0 , 1 ] [C_0,1] [C0?,1]ֱ��ʱ,����һ�����ŵ���Բ��,�����Բ�˲������߽��ķ�Χ C = 1 C=1 C=1ʱ�������ĵ㡣��ʱ���ٲ���ͼ ( a ) (a) (a)�еķ�ʽ��ȷ��������,����ͨ���жϵ��Ƿ�����Բ��,����Բ�ڵĻ�����������,������Բ�ڵĻ����Ǹ�������
���Ž���ڶ�������,�����Ƚϴ�ʱ,��ά��˹�˵ij��߲��ֻ����ͼ�����ĺ�Զ,��ʱ�����Ŀ��Ŷ�Ҳ�Ƚ�С,ͨ���������߸�˹�˷�����ʵ����Բ�ڳ��߷����ϵ�����,Ҳ��������ͼ�е� ( d ) (d) (d)��ʾ������ͨ������Э���������ʵ�ֶԳ��ߵ�����:
�� 0 = min ? ( w , h ) 12 [ w 0 0 h ] \Sigma_{0}=\frac{\min (w, h)}{12}\left[\begin{array}{ll} w & 0 \\ 0 & h \end{array}\right] ��0?=12min(w,h)?[w0?0h?]
Ҳ���ǽ���Բ�ij��������� w h \sqrt{wh} wh?,�̱߱��ֲ��䡣������Ϊ�����Բ���IJ�����������TTFNet�е�һ��������
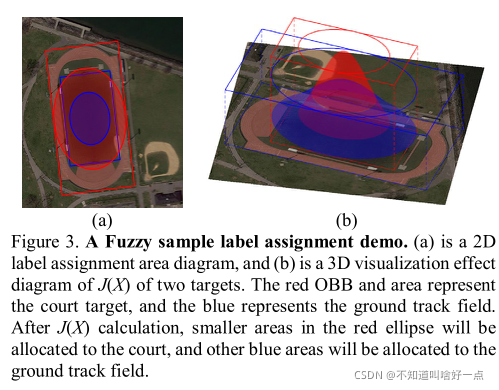
3.3 Fuzzy sample label assignment
FCOS�н���ͬ�߶ȵ�Ŀ���������в�ͬ����������ͼ������ambiguous���������ڳ߶������Ŀ��,FCOS��ambiguous������ǩ���ó�smaller targets,Ҳ���ǽ�С��Ŀ��(����Ĵ�С˵�������),�������ַ�ʽ���Ѵ������ճ��������ォ��ά��˹�ֲ���ֵ�����Dz����㵽Ŀ�����ĵľ������,���ľ���Ķ���ͨ����ʽ��ʾ:
J ( X ) = w h ? f ( X ) J(X)=\sqrt{w h} \cdot f(X) J(X)=wh??f(X)
�����κ�һ��������,����ÿһ��������� J ( X ) J(X) J(X)ֵ,���ֵԽ���ʾԽ�ӽ�Ŀ�ꡣ���յ�ǰ�ķ��䷽ʽ���Ա�����:
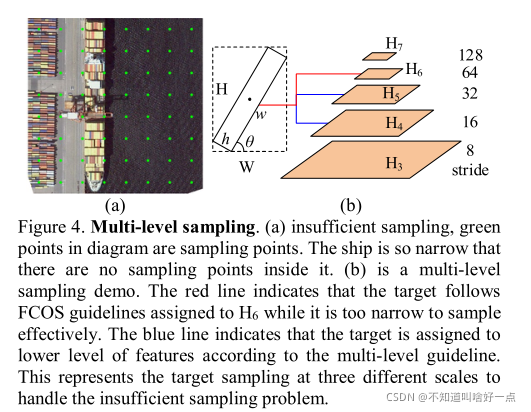
3.4 ����
���ڴ���Ŀ��,����������ʽ,����������Ҫ�̱ܶߵ�Ӱ��,��feature map�IJ����Ȳ����������ʱ(�̱ܶ�Ӱ��,��Ȼ�߽��ܴ�,���Dz�����������Ƚ�С,��������ͼ�IJ�����Сʱ��û�����䵽���������ع�߽����),Ϊ�˽���������,����ͨ���Ƚ϶̱ߺͲ����������Ƿ��ڵͲ�����ͼ�з����ǩ,�����������������Ļ��ͷ���:
- Ŀ��Ķ̱�ͬfeature map�����ı�ֵС��2,Ҳ����������ͼ�ϲ�����4�������ع�Ŀ�ꡣ
- ��ת����С������������εij��߳���������ͼ�ķ�Χ��
Multi-level sampling strategy�������ǽ�һЩ����Ч������Ŀ�����ӵ��ײ�����ͼ�ϡ��ڵײ�����ͼ�Ͻ����ܼ�������
����û˵������ô�����䵽���������ͼ�ϵ�,ֻ˵��ʲô����·�������������ͼ��
3.5 ��ʧ����
�ڷ�����ʧ��ʹ��QFL,ͬʱ����IoU���������ͱ߽�������:
Q F L ( �� ) = ? �O y ? �� �O �� ( ( 1 ? y ) log ? ( 1 ? �� ) + y log ? ( �� ) ) Q F L(\sigma)=-|y-\sigma|^{\beta}((1-y) \log (1-\sigma)+y \log (\sigma)) QFL(��)=?�Oy?���O��((1?y)log(1?��)+ylog(��))
��ʽ�� y y y��ʾIoU
�ع���ʧʹ��ProbIoU loss������ʧ��ʾΪ:
L o s s = 1 N p o s �� z Q F L + 1 �� z 1 { c z ? > 0 } I o U ? �� z 1 { c z ? > 0 } I o U ? Loss ? P r o b l o U \begin{aligned} L o s s &=\frac{1}{N_{p o s}} \sum_{z} Q F L+\\ & \frac{1}{\sum_{z} \mathbf{1}_{\left\{c_{z}^*>0\right\}} I o U} \cdot \sum_{z} \mathbf{1}_{\left\{c_{z}^*>0\right\}} I o U \cdot \operatorname{Loss}_{P r o b l o U} \end{aligned} Loss?=Npos?1?z��?QFL+��z?1{cz??>0}?IoU1??z��?1{cz??>0}?IoU?LossProbloU??
���� N p o s N_{pos} Npos?��ʾ����������, 1 { c z ? > 0 } \mathbf{1}_{\left\{c_{z}^*>0\right\}} 1{cz??>0}?��ʾʾ�Ժ���,������������ָ��Ӧ��������Բ���������ڵ�Ϊ1,������������Ϊ0.
(��) Experiments
4.1 ʵ������
- ���ݼ�����DOTA1.0,DOTA1.5�Լ�HRSC2016,ʹ�������ת+�����ת��ǿ���ݡ�
- ʹ��ResNext50+FPN��Ϊ�Ǹ�,��DOTA��ѵ��36��epoch,��HRSC2016��ѵ��40k������DOTA��ʹ��SGDѧϰ��,��ʼѧϰ��0.01(�о�ͦ��İ�),ѧϰ����24��33��epoch����10����HRSC2016��ʹ��SGD,ѧϰ��0.001��30K��36Kѧϰ���½�10��������Ϊ0.9,Ȩ��˥��Ϊ0.0001.
- ���ʹ��������ת,��һ���ȸ�����ת0,90,180,270.��2����50%�ĸ�����ת30��60�ȡ�����������ת����������ת������?
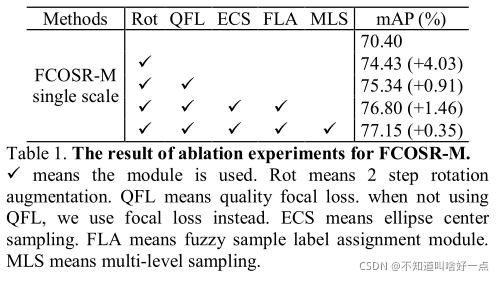
4.2 ����ʵ��
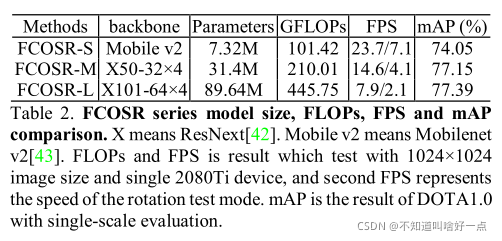
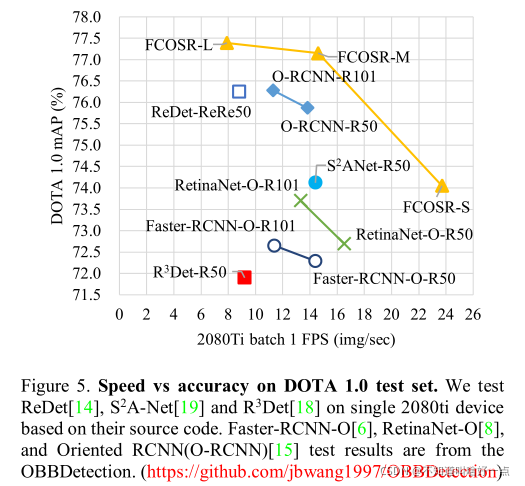
4.3 ���Ⱥ��ٶ�
4.5 �������ݼ��ϵĶԱ�ʵ��
(��) Conclusions
���Ľ���ά��˹�ֲ����뵽FCOS��,��Ҫ�������� ellipse center sampling, fuzzy sample label assignment, and multi-level sampling����Բ���IJ���Ϊ��ת�����ṩ�˸����ʵIJ�������ģ��������ǩ���䷽���������ػ������ص�Ŀ��IJ��������γ�����������˴���Ŀ�������������⡣
(��) Notes
8.1 ��������ת��Ŀ�����㷨
��ê��ķ���
ROI transformer:������Transformer,���Dz����ǻ���Transformer�ܹ��ķ���,��Ҫ��ͨ����ROI�����ˮƽproposalsת���OBB(��ת�߽��),��ȡ��תproposal���������ں����ķ���ͻع顣
ReDet��������һ��rotation invariant����(e2cnn)������ģ����,����ͨ��RiROI alignment��ȡ��rotation invariant features
Oriented R-CNN�н�ROI Transformer�е�RROI learning ģ����һ��������,��oriented region proposal network(orientation RPN)�����滻
R3Det��ͨ��Feature innovation module(FRM)ģ��ˮƽ��anchor�������õ���תanchor
S2ANet��feature Alignment module(FAM)ģ���Լ�Oriented detection module(ODM)ģ����ɡ�FAM�������ɸ���������תanchor��ODM����active filters�������������кͷ��������,����������ͬlocalization���Ȳ�һ�µ����⡣
CSL���Ƕ�Ԥ��ת���ɷ�������,�����discontinuous rotation angles�����⡣
DCL����CSL�Ļ����ϲ������ܼ����������ѵ���ٶ�,ͬʱ���ýǶȾ���ͳ����ȼ�Ȩ���������ܡ�
���
IENet������һ������ע�������Ƶ�branch interactive module,�ܹ��ںϷ���ͻع��֧��������
GWD,KLD,ProbIoUʹ��������ά��˹�ֲ�֮��ľ����������ʾ��ʧ,������anchor-free�ķ�ʽ�ṩ��һ���µĻع���ʧ�����������Ҫ���濴��
PIoU������������ת����ܹ��ݶȷ�������ʧ����
BBAVectors��PolarDet�ֱ�ʹ��bbav vector�Լ�polar coordinates������ת��
CenterRotʹ�ÿɱ��ξ������ں϶�߶�������
AROA������ע�������ơ�